【导读】
本文针对嵌入式悬架系统对实时路况感知的需求,提出了轻量高效的SBP-YOLO****模型,用于检测减速带和坑洼。该模型以YOLOv11n为基础,通过引入P2检测层增强小目标检测能力,并采用GhostConv、VoVGSCSPC模块及轻量化检测头(LEDH)大幅降低计算开销。
尽管基于视觉的坑洼和减速带检测取得了进展,但在动态驾驶下的实际应用仍然困难。在远距离上,这些异常目标显得很小,难以检测。快速行驶带来的运动模糊会使特征退化,而阴影、眩光和昏暗光照则会掩盖道路线索并降低鲁棒性。嵌入式系统上有限的计算能力也限制了输入尺寸和模型深度,使得实时应用更加困难。为了应对这些挑战,本文提出了一种专为减速带和坑洼检测量身定制的轻量高效模型。主要贡献如下:
- 引入了轻量高效检测头(LEDH) 以减少P2层的计算开销,同时保持对小目标和远处目标的检测精度。结合主干网络和颈部网络中的GhostConv模块和VoVGSCSPC块,所提出的架构提升了在不同道路和环境条件下的特征提取效率和鲁棒性。
- 采用了全面的训练策略以提高动态场景下的检测性能,该策略结合了用于精确定位的NWD损失 、用于知识蒸馏的****BCKD 以及基于Albumentations的数据增强来模拟运动模糊、光照变化和恶劣天气条件。
- 模型通过TensorRT量化至FP16并进行优化,在NVIDIA Jetson AGX Xavier上实现了139.5 FPS的推理速度,从而满足了嵌入式路况检测的实时性要求。
论文标题:
SBP-YOLO:A LIGHTWEIGHT REAL-TIME MODEL FOR DETECTING SPEED BUMPS AND POTHOLES
论文 链接 :
SBP-YOLO 架构
本研究聚焦于智能悬架系统的需求,准确检测路面异常(如坑洼和减速带)对于预测控制至关重要。为了解决计算资源有限和实时推理的约束,我们采用 YOLOv11n 作为基线,并引入一系列结构改进,形成了所提出的 SBP-YOLO 架构,如图 1 所示。
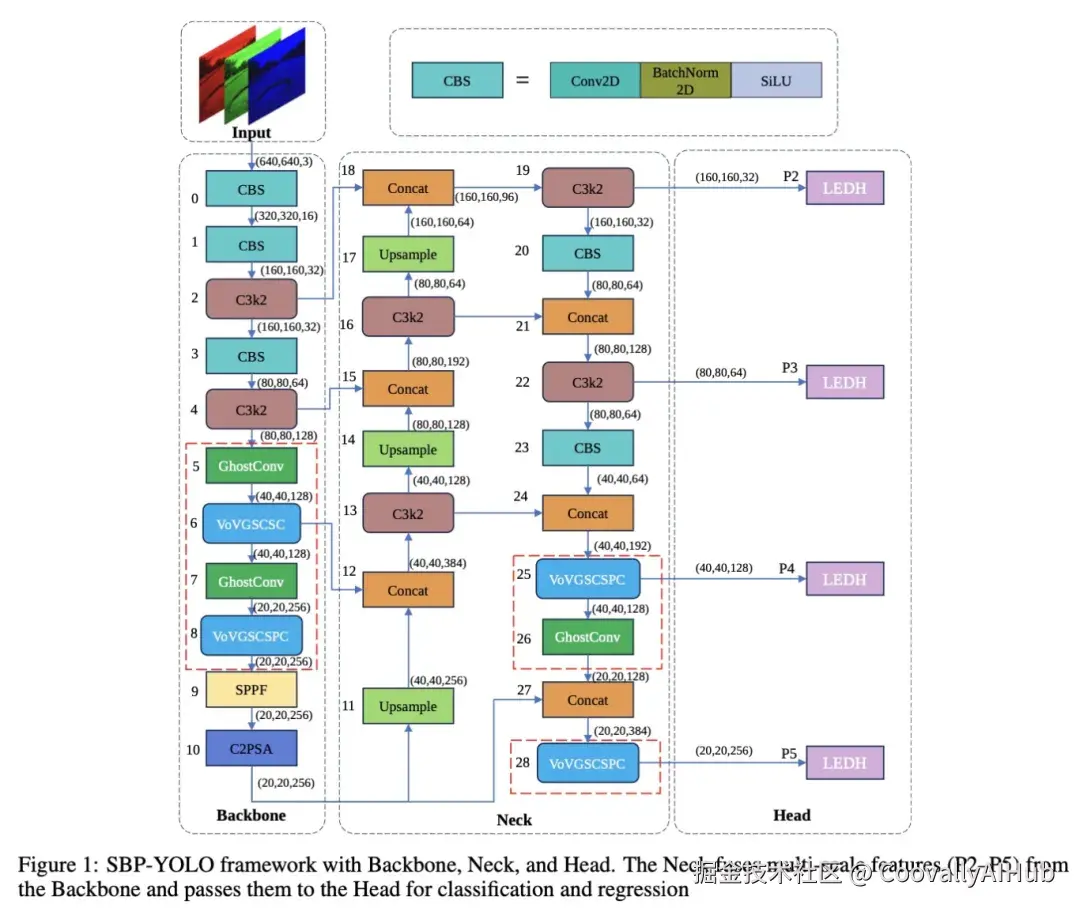
主干网络通过在其更深阶段用 GhostConv 模块替换传统卷积层得到增强。这种替换显著降低了计算成本,同时保持了足够的特征提取能力。为了改进跨不同空间分辨率的特征表示,引入了一个名为 VoVGSCSPC 的新模块。该设计整合了受 VoVNet 启发的密集连接模式和基于 GSConv 的瓶颈结构,并应用于主干网络和检测头中,以增强语义特征传播。
为了提高对小目标和远处目标的敏感性,额外加入了一个早期 P2 检测层。该层允许模型利用网络浅层阶段的特征来捕获精细的空间细节。与标准的三级检测结构(P3 到 P5)相比,SBP-YOLO 采用了四级检测策略,包括来自 P2 (160 × 160)、P3 (80 × 80)、P4 (40 × 40) 和 P5 (20 × 20) 的特征图。检测头还集成了一个轻量高效的设计,称为 LEDH,它在保持检测精度的同时进一步减少了计算开销。所有特征图都标注了其空间维度,例如 (320, 320, 16),其中三个值分别代表高度、宽度和通道数。这种表示法清晰地概述了每个层的尺度和结构。
总体而言,SBP-YOLO 通过整合 GhostConv 模块、VoVGSCSPC 结构、专用的早期检测分支和 LEDH,扩展了基线 YOLOv11n。这些增强旨在提高模型捕获精细空间细节的能力,增强跨多尺度的特征表示,并降低计算复杂度。此类架构改进旨在实现准确高效的路面异常检测,支持在智能车辆控制和预测性悬架系统中的部署。
实验与分析
- 评估指标
为了定量评估检测性能,我们采用平均精度均值(mean average precision, mAP),包括 IoU 阈值为 50% 时的 mAP(mAP50)以及 IoU 阈值从 50% 到 95% 的平均值(mAP50-95)。
- 消融实验
表 1 中的消融研究通过将每个提出的模块逐步集成到 YOLOv11n 基线中来评估其有效性。每种配置都包含前一行的所有模块以及一个新添加的组件。
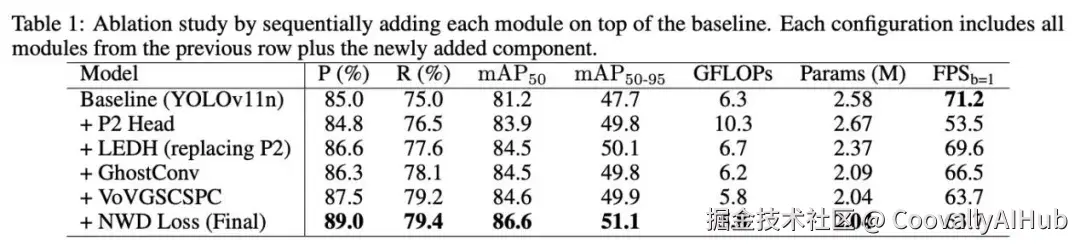
基线 YOLOv11n 模型展示了快速的推理速度(71.2 FPS),但检测精度相对有限(mAP50 = 81.2%, mAP50-95 = 47.7%),这主要是由于缺乏对检测小目标至关重要的低级特征信息。引入 P2 检测头显著提高了精度,达到 mAP50 = 83.9%,尽管这是以增加计算复杂度(FLOPs 从 6.3G 增加到 10.3G)和推理速度下降至 53.5 FPS 为代价的。
为了实现更好的精度-效率权衡,我们用提出的 LEDH 替换了标准的 P2 检测头。这种替换进一步提高了精确率(+1.8%)和召回率(+1.1%),同时显著降低了 35% 的 FLOPs,并将速度提高至 69.6 FPS。
随后,引入 GhostConv 使 FLOPs 额外减少了 7.5%,且对检测精度影响极小。在此基础上,集成 VoVGSCSPC 主干模块不仅降低了模型复杂度(降至 5.8 GFLOPs 和 2.04M 参数),还将检测精度提高至 mAP50 = 84.6%。
最后,应用 NWD 损失进一步增强了模型定位小且不规则目标的能力,在所有配置中实现了最高的精确率(89.0%)和整体检测性能(mAP50 = 86.6%, mAP50-95 = 51.1%)。这些结果验证了每个提出的组件都对性能提升有贡献,并且最终模型在速度、精度和轻量化设计之间实现了引人注目的平衡,使其非常适合在资源受限的环境中实现实时道路异常检测。
- 模型对比实验
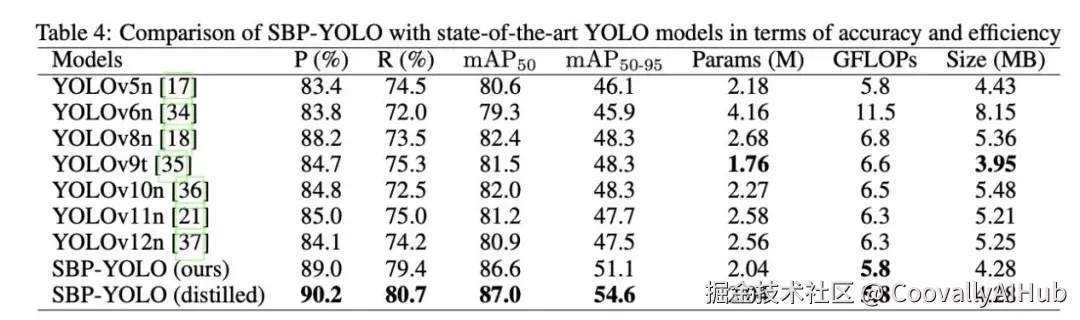
为了全面评估检测质量和计算效率,我们将 SBP-YOLO 与代表性的 YOLO 变体(YOLOv5 到 YOLOv12)在标准性能和复杂度指标上进行了比较。如表 4 所示,SBP-YOLO 实现了 86.6% 的 mAP50 ,比 YOLOv11n 基线高出 5.4% ****,同时将模型参数、FLOPs 和存储空间分别减少了 20.9%、7.9% 和 17.9%。经过知识蒸馏后,SBP-YOLO(蒸馏版)进一步提高了检测精度,达到 87.0% mAP50 和 54.6% mAP50-95,且没有引入额外的计算开销。
- 性能对比
如图 8a 所示,SBP-YOLO 对远距离处的小尺度道路特征(如远场减速带和坑洼)表现出改进的检测能力。图 8b 说明了在不同光照条件下的检测性能,包括日落、夜间和强阳光。SBP-YOLO 在所有场景下都保持了稳定的准确性。在夜间,它的性能优于 YOLOv59%,而在对比度降低可能阻碍检测的日落时分,SBP-YOLO 显示出比其他模型更鲁棒的结果。在导致眩光的强阳光下,SBP-YOLO 成功识别了远处的坑洼,而像 YOLOv8 这样的模型偶尔会漏检目标。
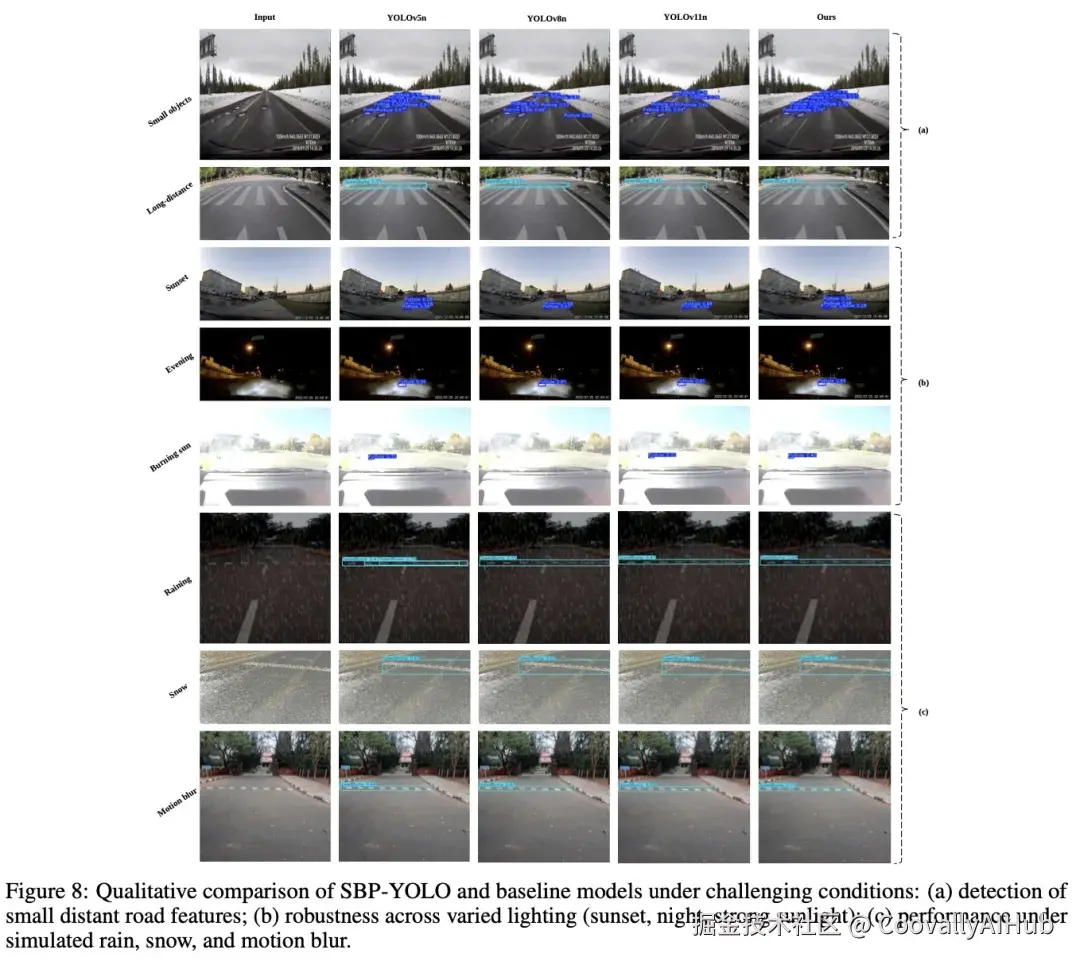
为了评估视觉退化环境下的鲁棒性,图 8c 报告了在模拟雨、雪和运动模糊的增强数据集上的结果。SBP-YOLO 在模拟雨中实现了 0.64 的检测准确度,优于 YOLOv11n (0.47) 和 YOLOv5n(最低)。在雪和运动模糊条件下也观察到了类似的改进,证明了模型在复杂视觉扰动下的韧性。
- 推理实验
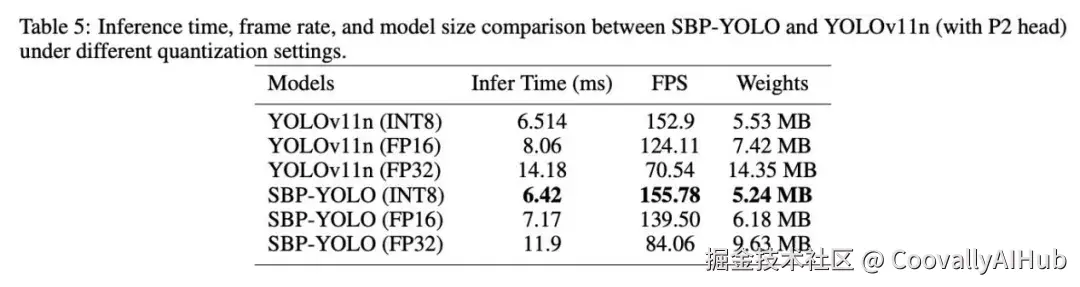
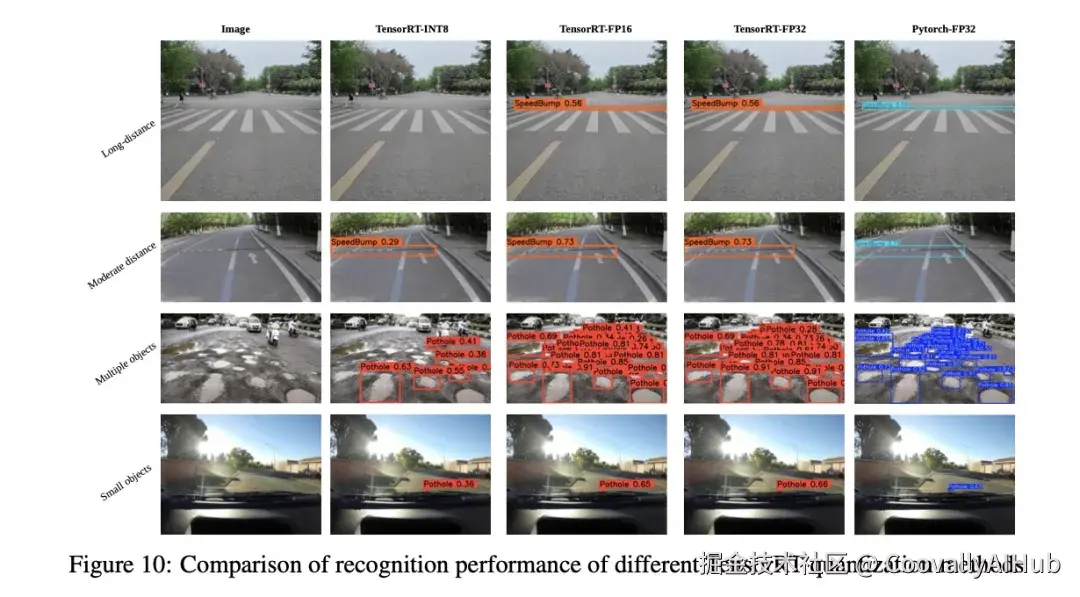
为确保公平比较,基线 YOLOv11n 模型增加了 P2 检测头,以与 SBP-YOLO 的检测结构保持一致。因此,性能评估仅关注 SBP-YOLO 中所提出改进的有效性,而非模型容量或检测粒度上的差异。表 5 和图 10 报告了在不同精度模式(包括 INT8、FP16 和 FP32)下的推理性能。在 FP16 下,SBP-YOLO 相比修改后的 YOLOv11n 实现了 15.39 FPS 的提升;使用 FP32 时,改进为 13.52 FPS。此外,SBP-YOLO 在所有配置下都保持更小的模型大小,反映了其卓越的效率。在相同推理条件下比较不同的量化模式时,INT8 导致精度较低且漏检频繁。FP16 保持了接近 FP32 的精度,同时显著降低了延迟。值得注意的是,FP16 下的 SBP-YOLO 能够持续检测到远距离减速带和复杂坑洼,在实时部署场景中表现出更低的漏检率和更高的可靠性。
结论
本文提出了 SBP-YOLO,一个用于实时检测减速带和坑洼以支持预测性悬架控制的轻量级框架。它以 YOLOv11 为基础,结合了一个采用共享 GroupConv 变换的 P2 检测头和 LEDH,以增强小目标敏感性同时减少计算开销,并辅以 GhostConv 和 VoVGSCSPC 模块以实现高效的多尺度特征提取。结合了 NWD 损失、主干层级知识蒸馏和先进数据增强的混合训练策略提高了鲁棒性和泛化能力,相比 YOLOv11n 基线实现了 5.8% 的 mAP 增益。经过 TensorRT FP16 优化后,模型在 Jetson AGX Xavier 上达到 139.5 FPS,比 P2 增强的 YOLOv11n 加速了 12.4%,同时保持了卓越的精度。这些结果证明了该框架在实时嵌入式部署中的有效性,能够实现预瞄感知和自适应阻尼控制,未来的工作将探索红外集成和多模态检测,以进一步增强 diverse conditions(多样化条件)下的鲁棒性。