前言
这篇博客是全网首发 Realsense 新款相机 D555 与其家族部分产品测评 。该相机是 Realsense 于 2025年08月01日 发布的一个新产品,其产品时间线如下:
- 2025年08月01日:北美发放小批量样品;
- 2025年09月01日:在国内发放小批量样品;
- 预计 2025年10月01日:正式发售;
我们团队有幸在这期间获得了其中一台样品机器,并在 2025年09月04日形成了这篇博客初稿,文稿与数据校验完后于 2025年09月05日在 CSDN、知乎、小红书上发表;希望我们的工作能为想要使用这款相机的朋友们提供参考。

1. D555 技术规格与介绍
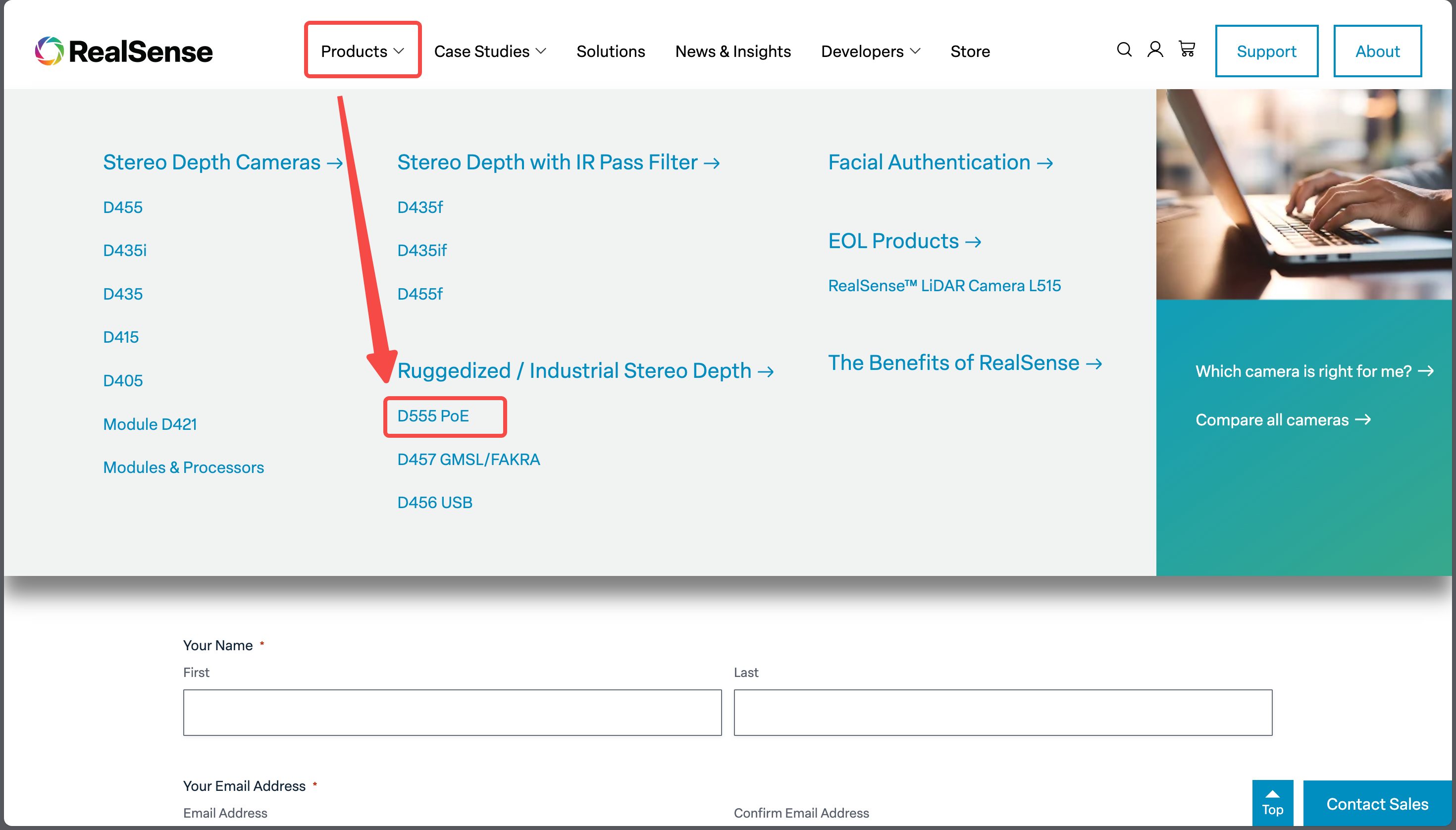
进入 Realsense 官网 后在上方的导航栏中的 Products 可以看到 D555 PoE 这款产品:
- Realsense D555 介绍界面:https://realsenseai.com/ruggedized-industrial-stereo-depth/d555-poe/
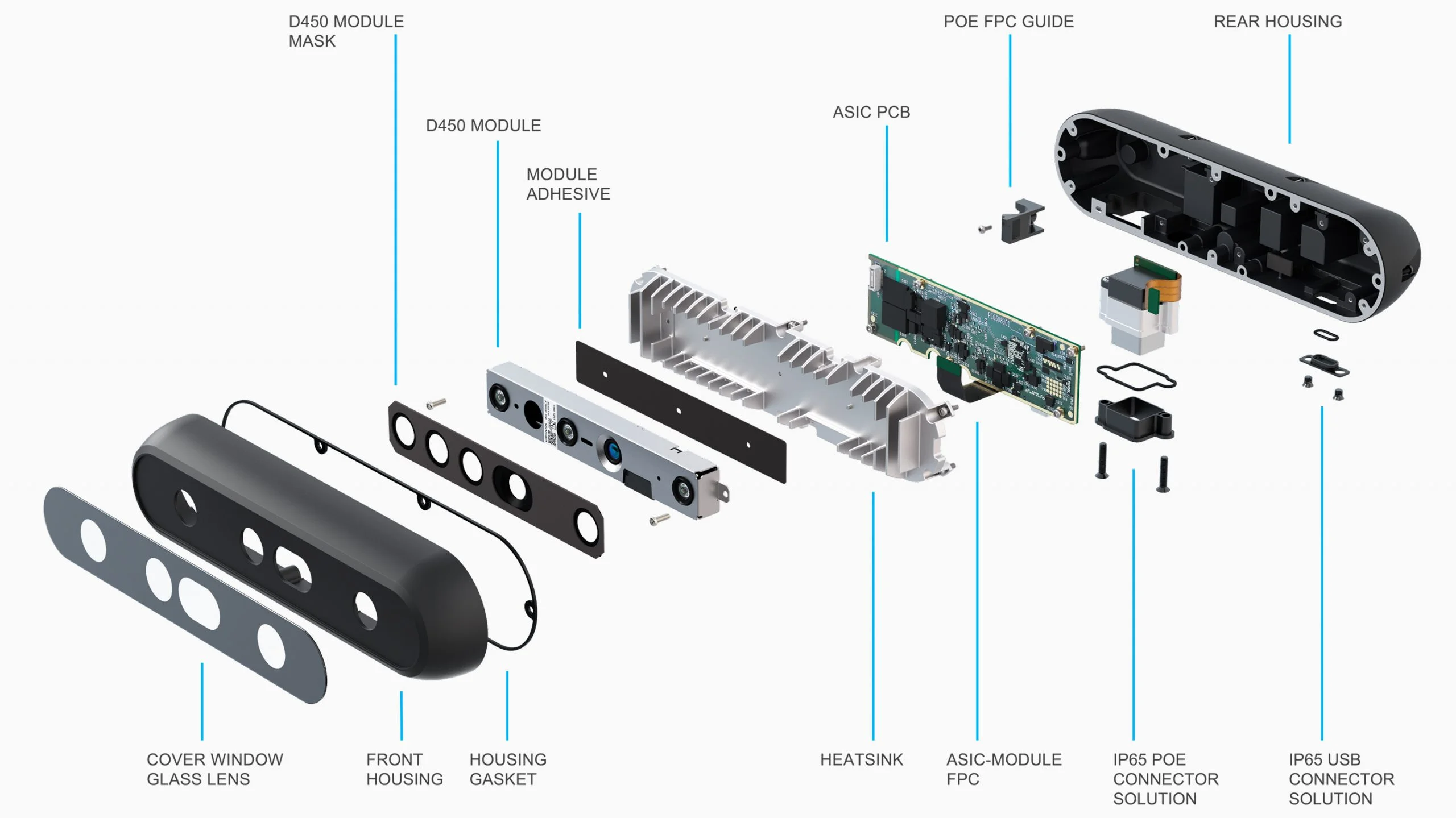
产品的升级与迭代如下:
- 新增了 PoE 网口通讯方式,原来的 Type-C 仍然可以用;
- 使用了全新一代的
Vision SoC V5视觉芯片; - 支持
IP65防护等级;
2. 真机拆箱
产品盒中有 一台 D555 相机 、一份说明书 、一个三脚架 、一包0.5m网线;
下图中红色框为新品 D555,黑色框为 D435i。D555 大概是四台 D435i 以 2 x 2 的形式排列的长宽。
| D555 与 D435i对比 | 全部待测设备 |
|---|---|
 |
 |
3. 测试结果
这部分内容为 D555、D435i、L515、D456、DJI Action 5 Pro 横向对比,涵盖了多个常见机器人应用场景。
前情提要
在阅读测评结果之前,你 必须知晓 以下信息:
- 由于不同平台会使用不同的图像压缩算法,为了避免偏颇,我们将原始数据上传到了网盘中,如果你想要获取最真实的原始数据,建议从下面的链接中下载;
- 由于 L515 折款相机已经停产,在采集该相机的时候使用的 librealsense 版本是
v2.50.0,其他相机录制数据使用的是v2.56.5stable; - 使用
Realsense-viewer软件并在Windows 10笔记上录制;
bash
链接: https://pan.baidu.com/s/1CWkW_Yb4mnrxrSWrfuVD_w?pwd=znsu 提取码: znsu 初步结论
以下是产品对比的初步结论,测试可能不充分,建议根据自己实际情况选择是否需要采购该设备:
- 新的传感器和芯片 没有带来预期提升;
- 在 Ubuntu 20.04 ROS1 noetic 环境下 未能拉起相机;
- 镜头依旧 容易沾染污渍 造成散光;
总体而言,由于 D555 这款相机在外观结构和通讯方式上有较大改动,如果你的应用场景确实对 IP65 和 PoE 供电有所需求,那么该产品是目前市面上为数不多的选择。
3.1 室内场景
3.1.1 正常光照
- RGB - Action 5 Pro

- RGB
| D435i | D456 | L515 | D555 |
|---|---|---|---|
 |
 |
 |
 |
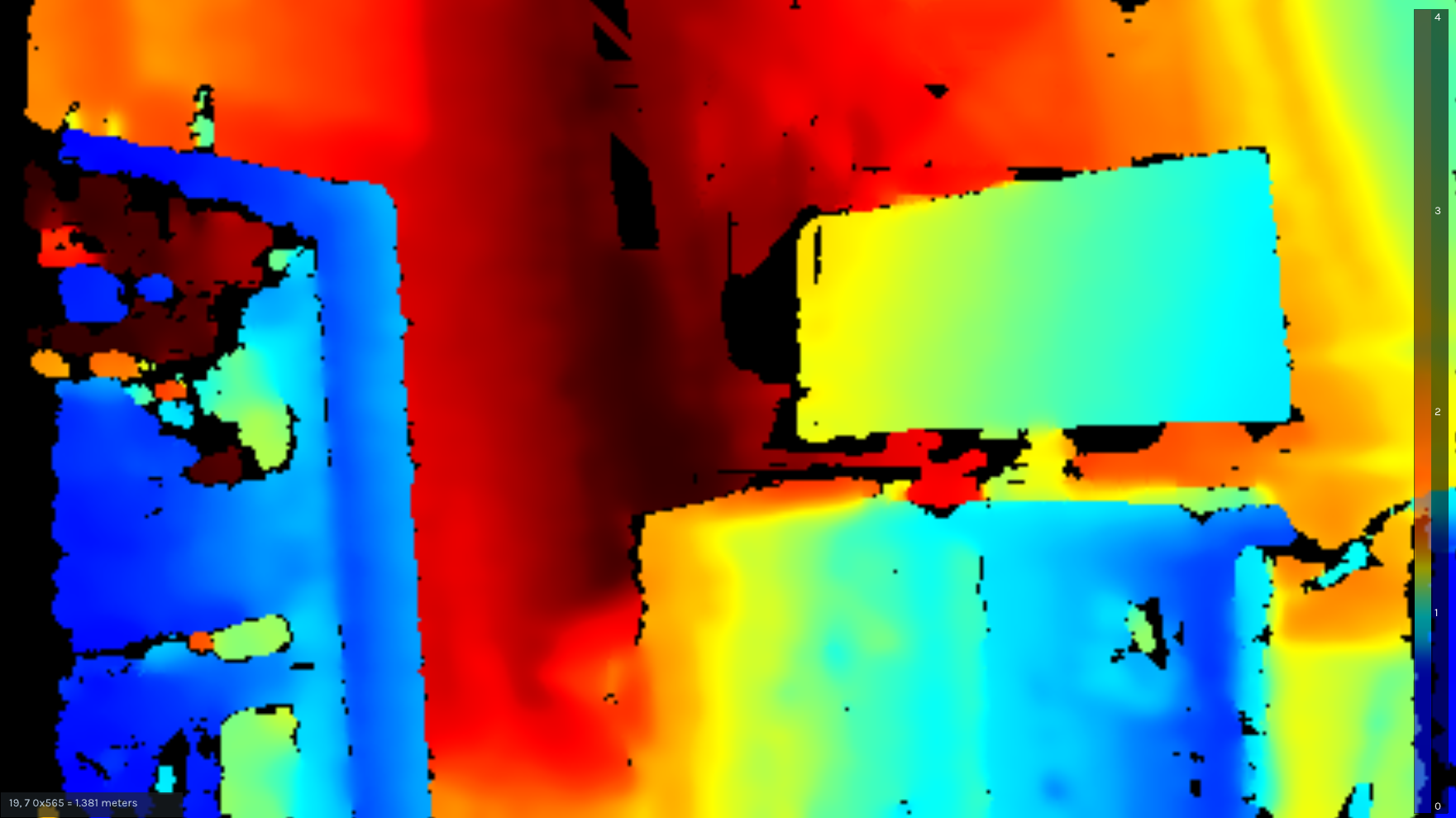
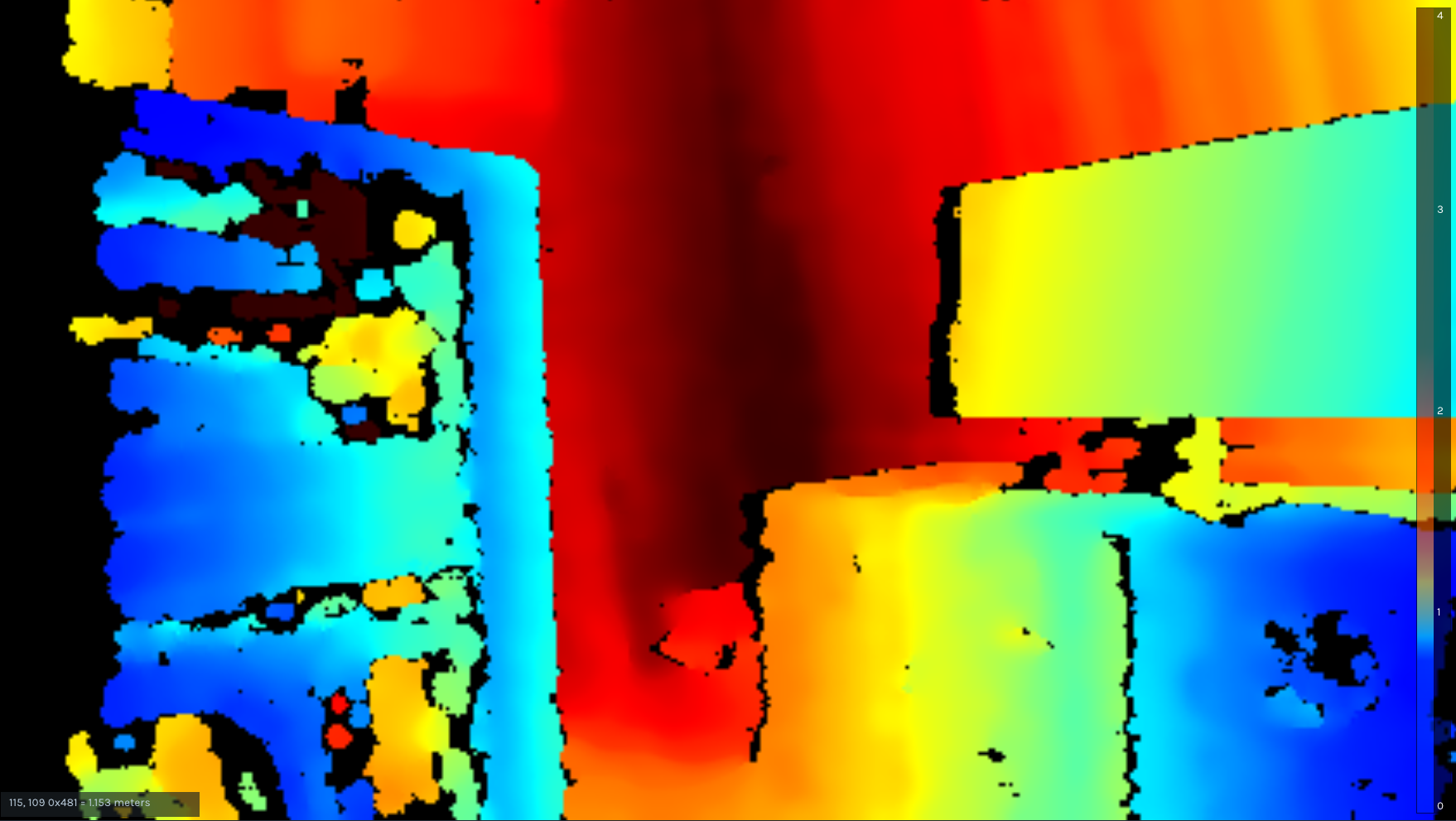
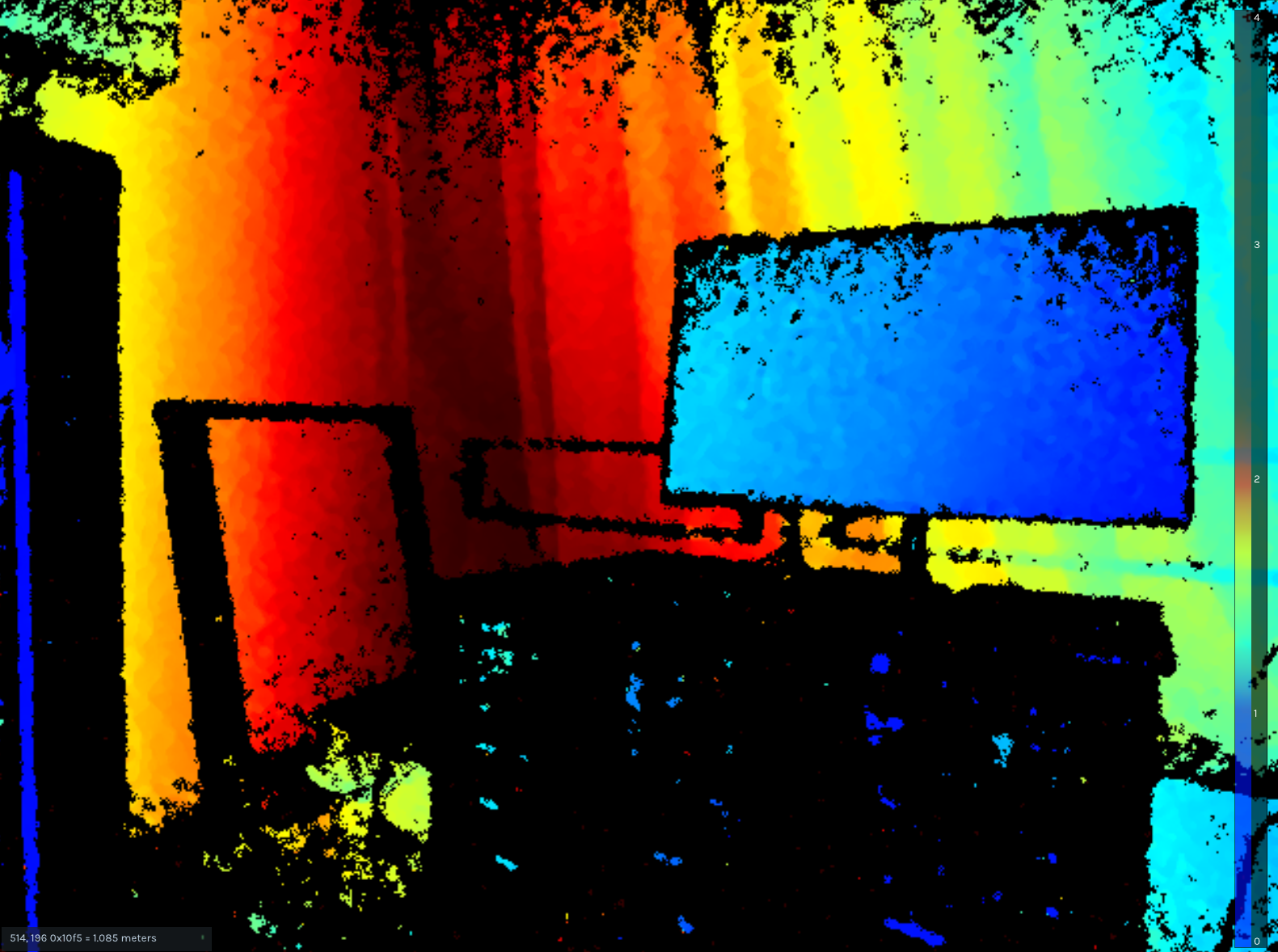
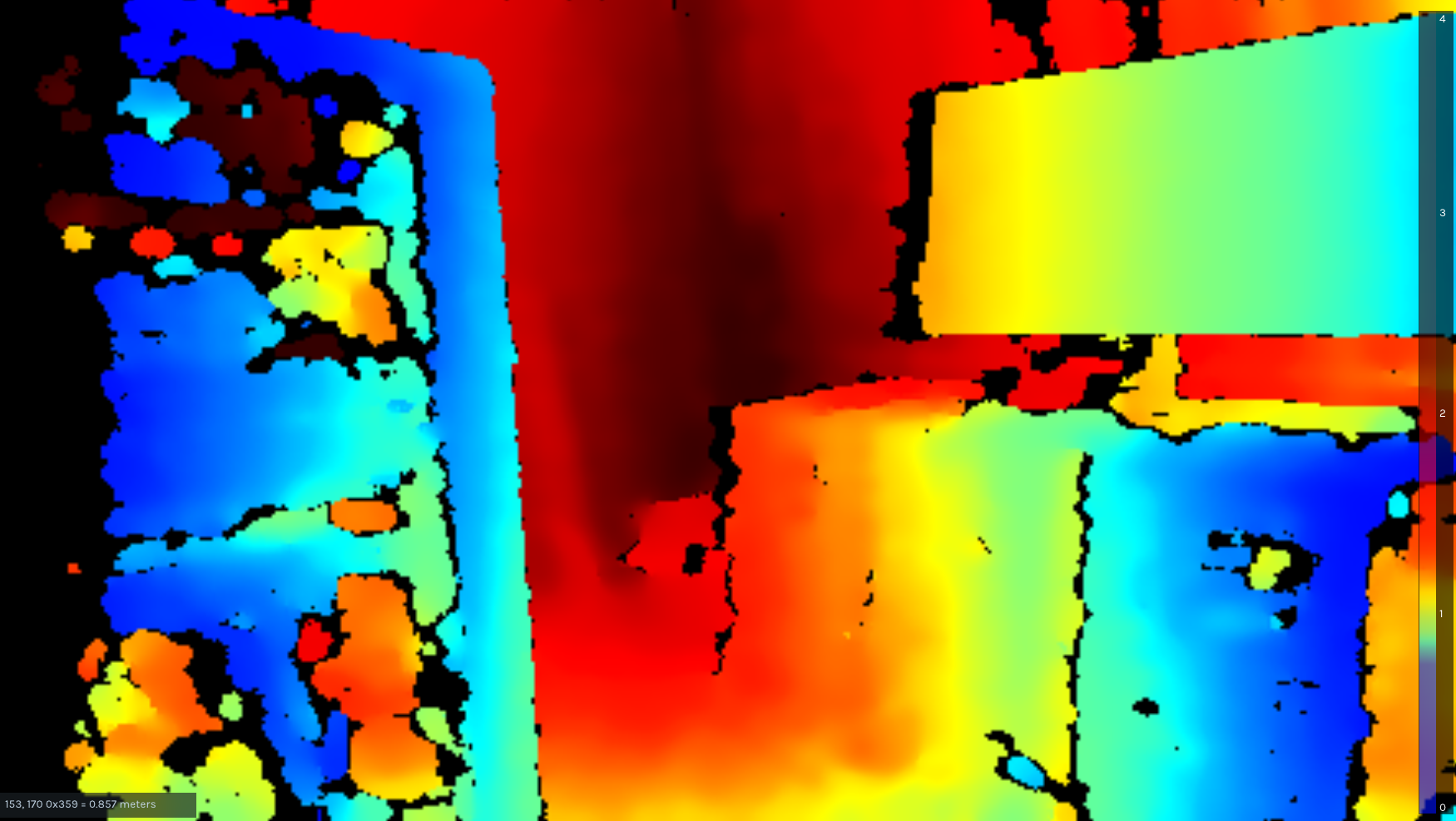
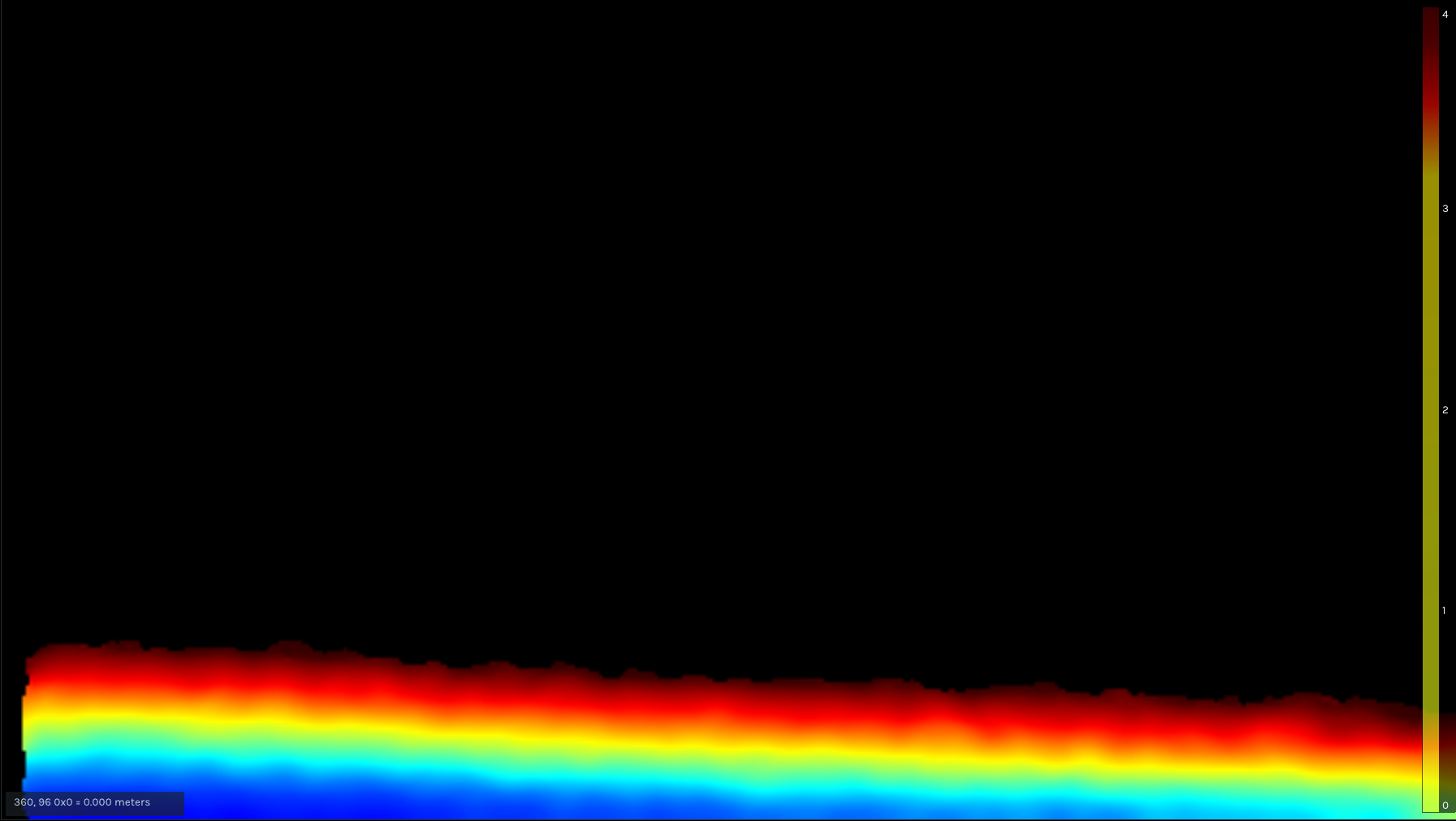
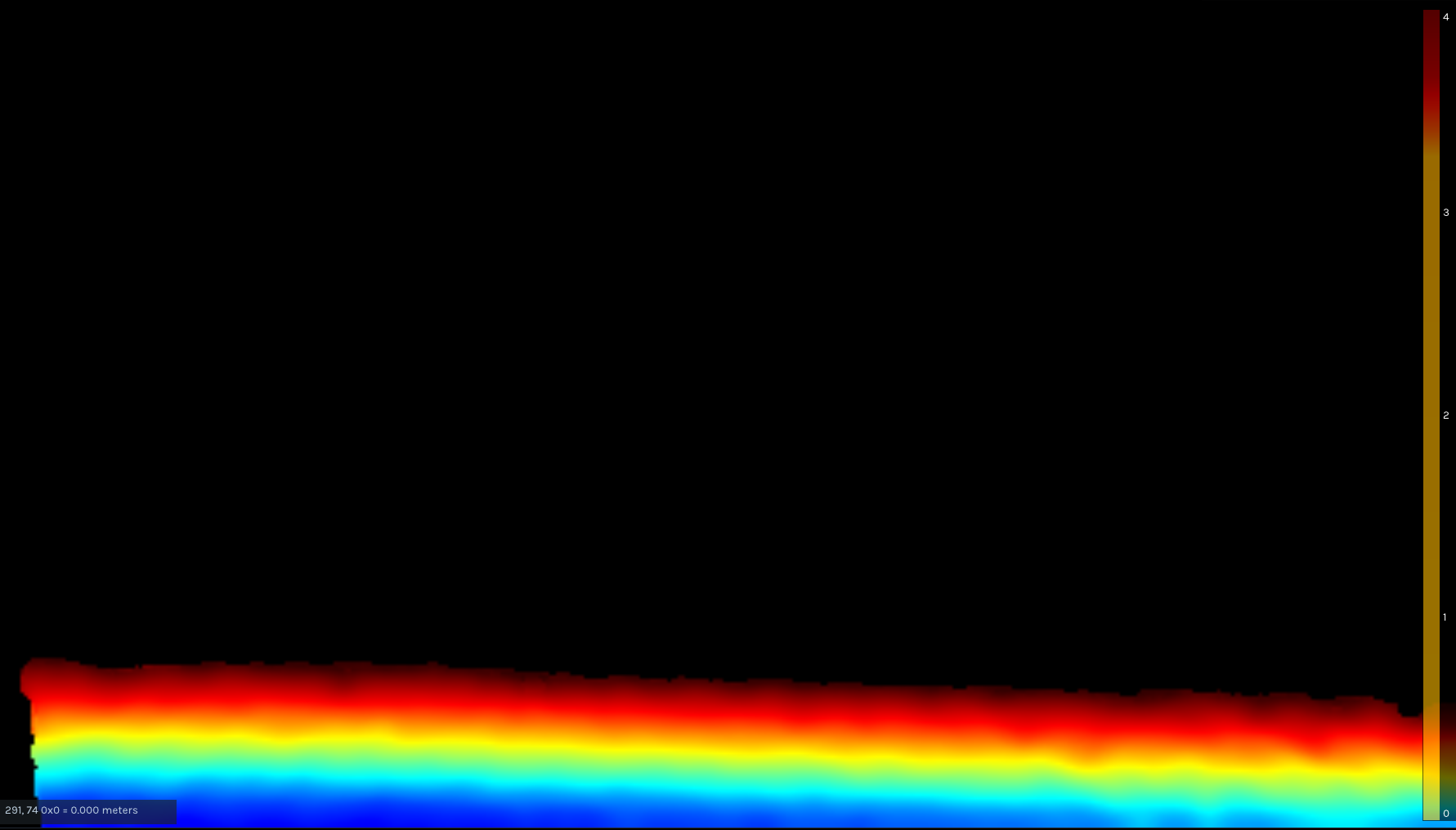
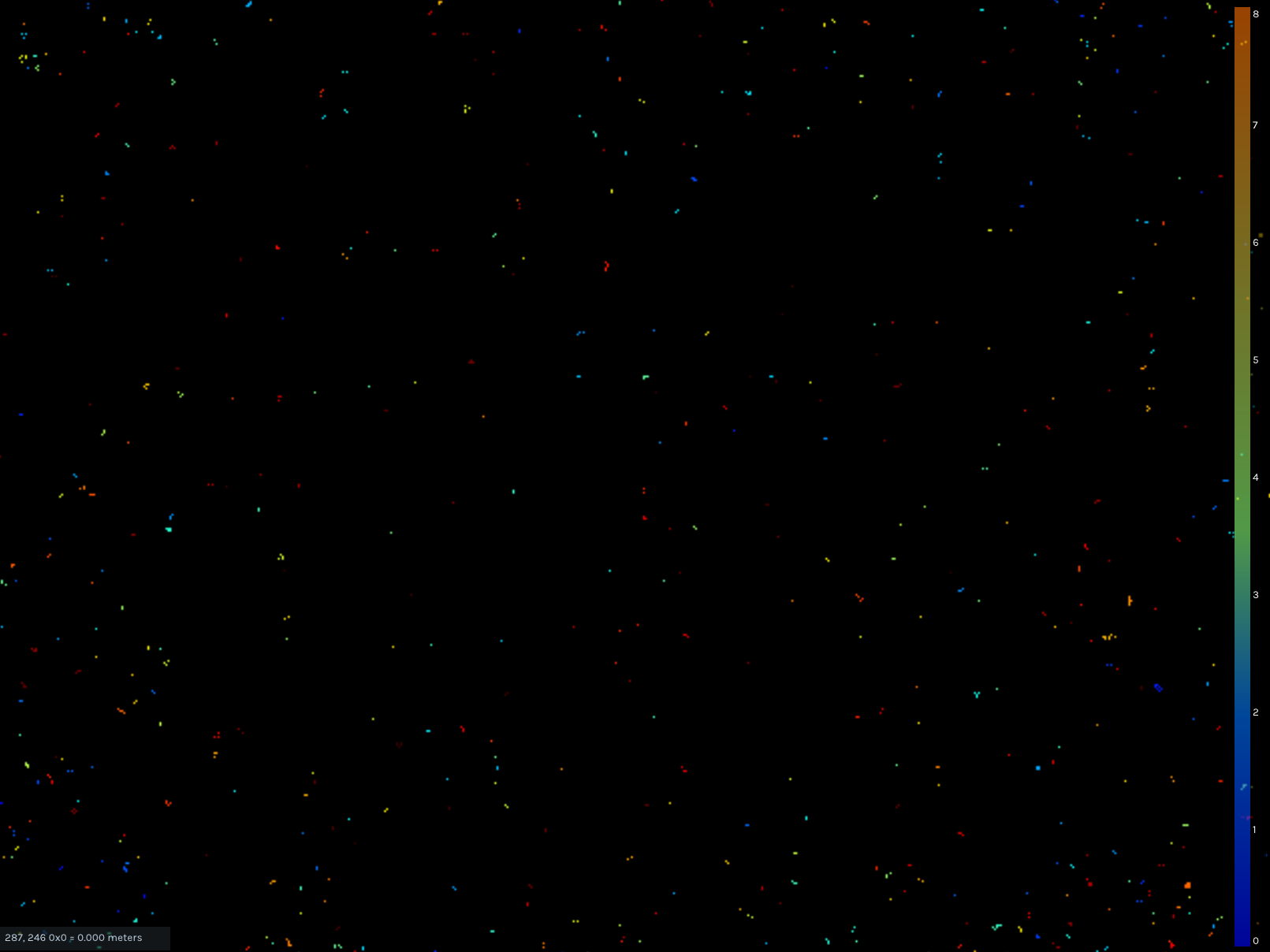
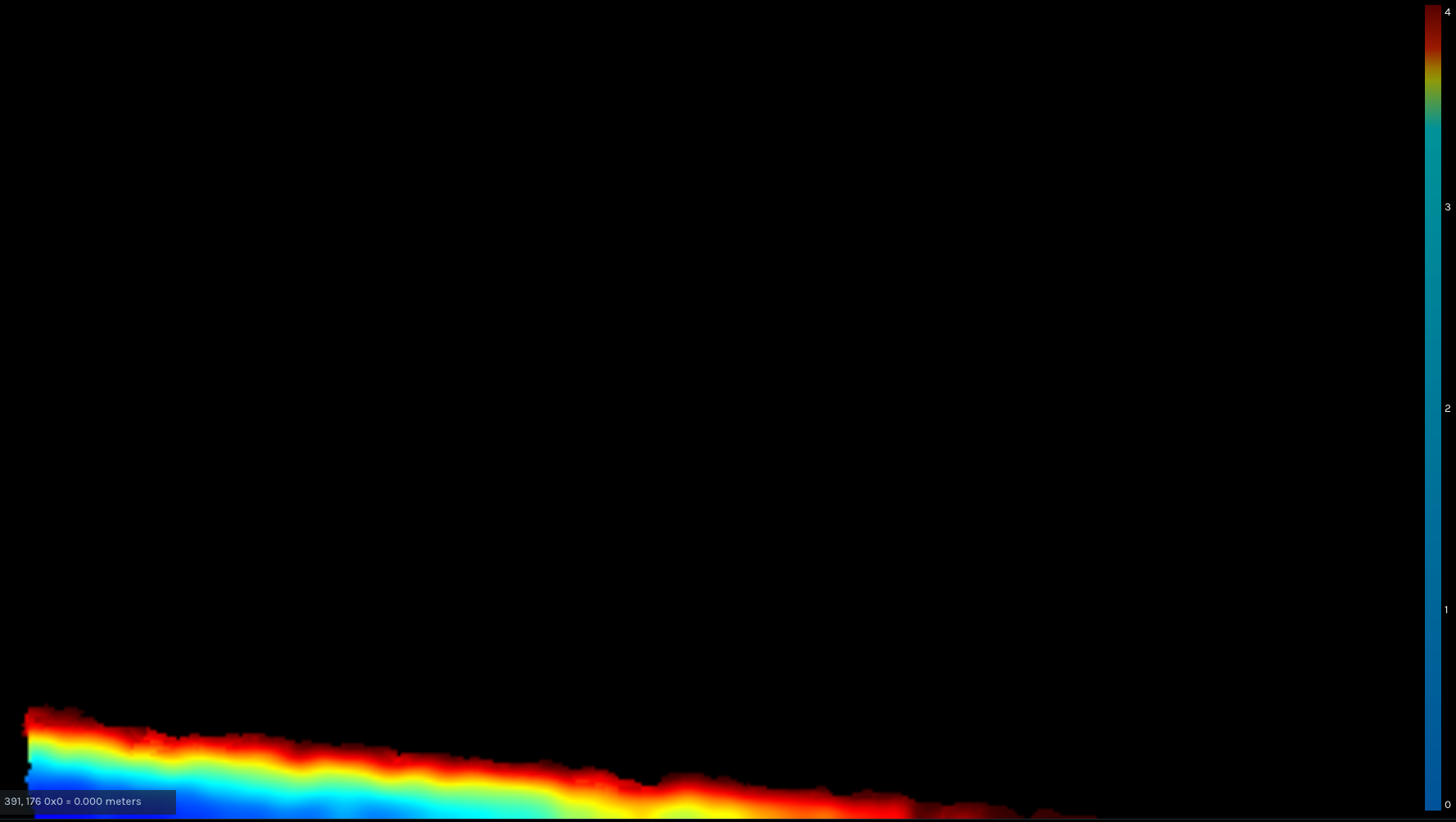
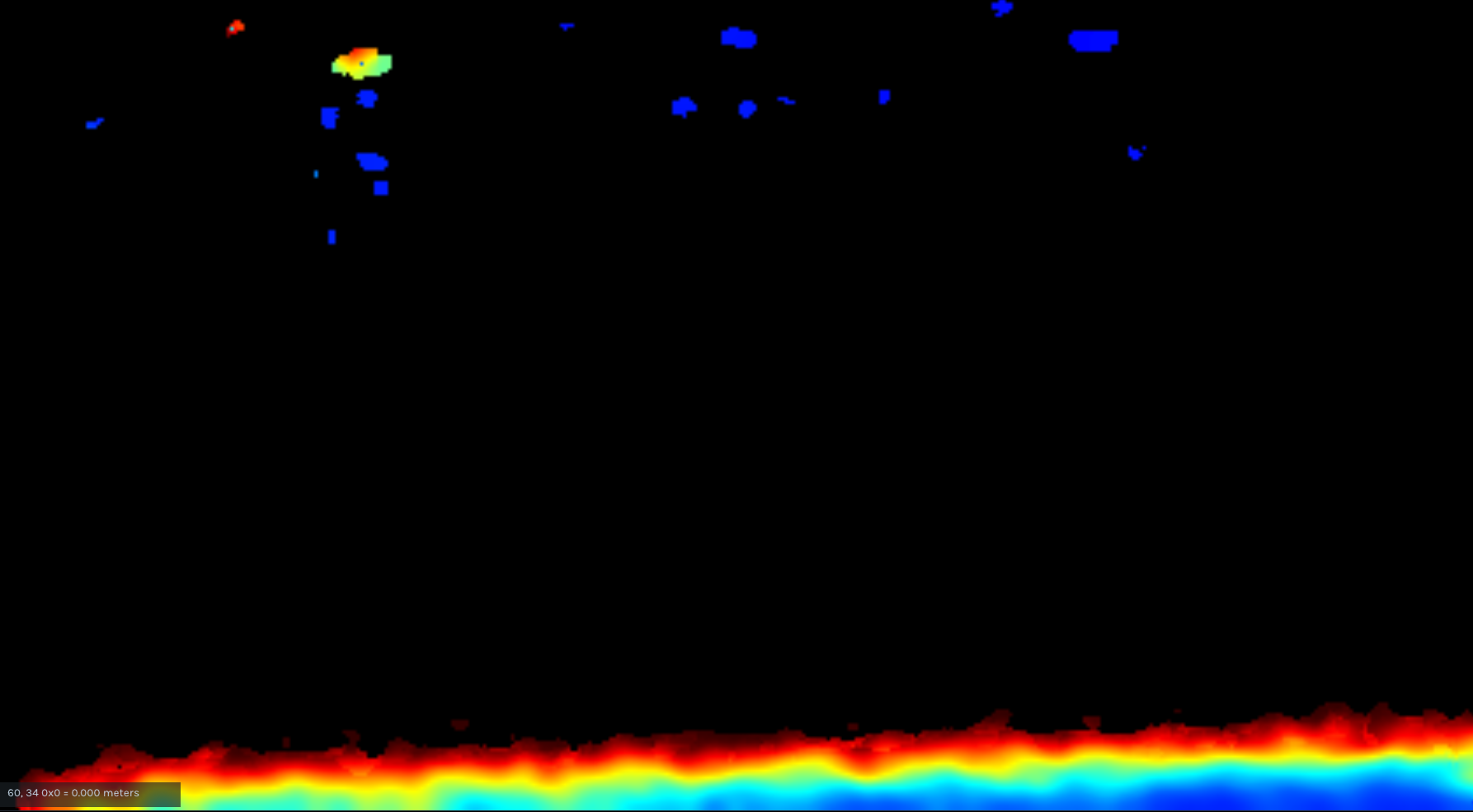
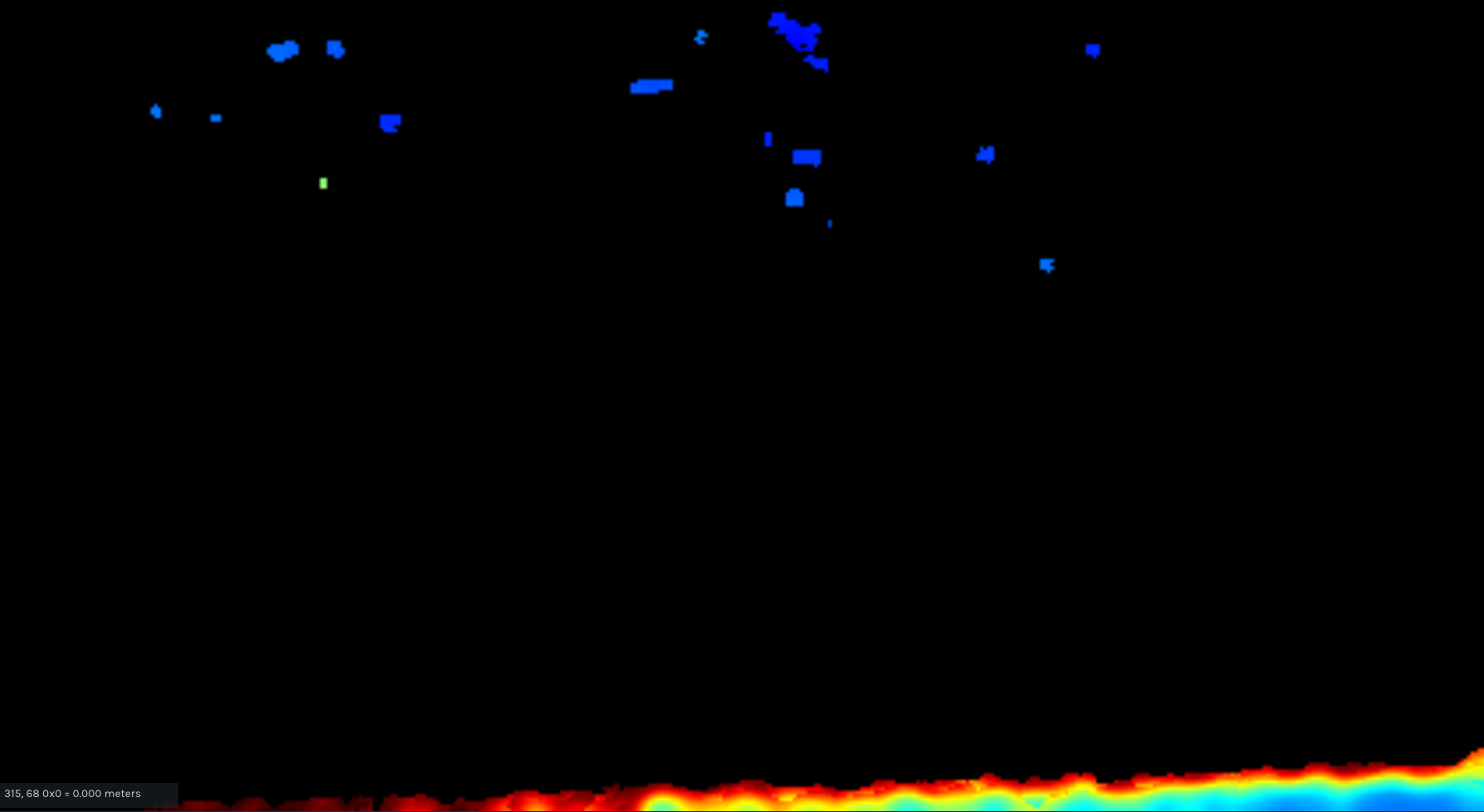
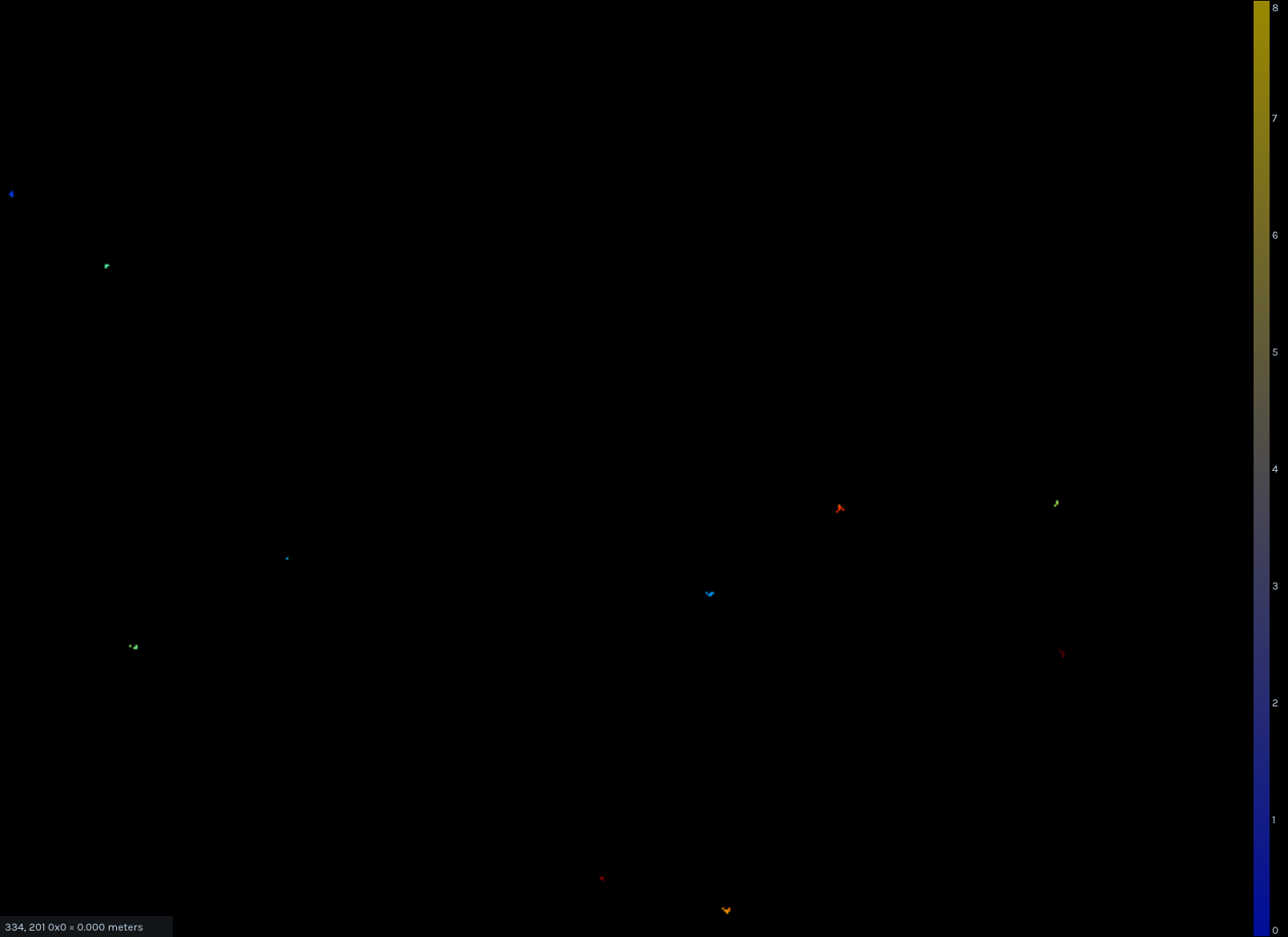
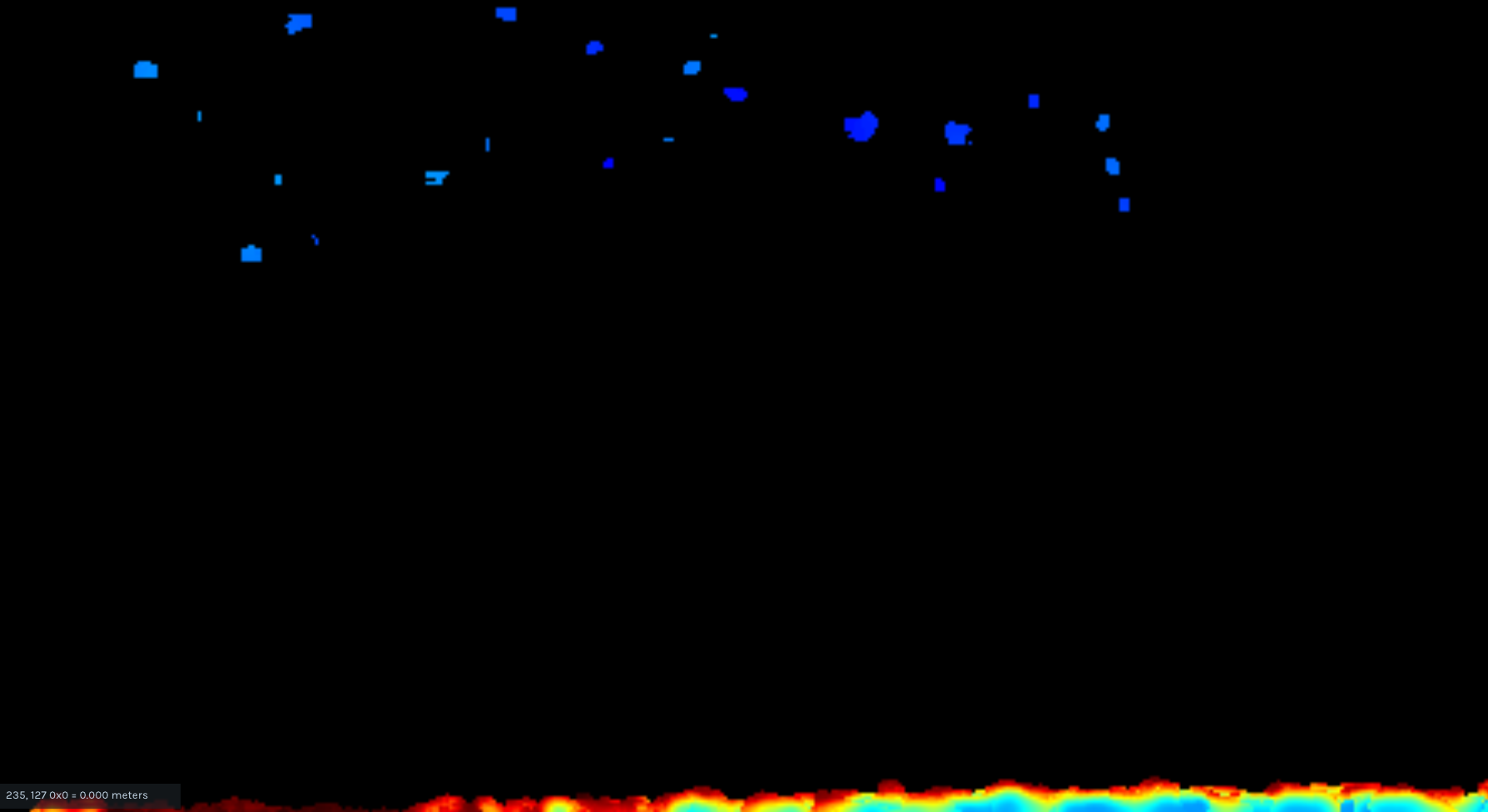
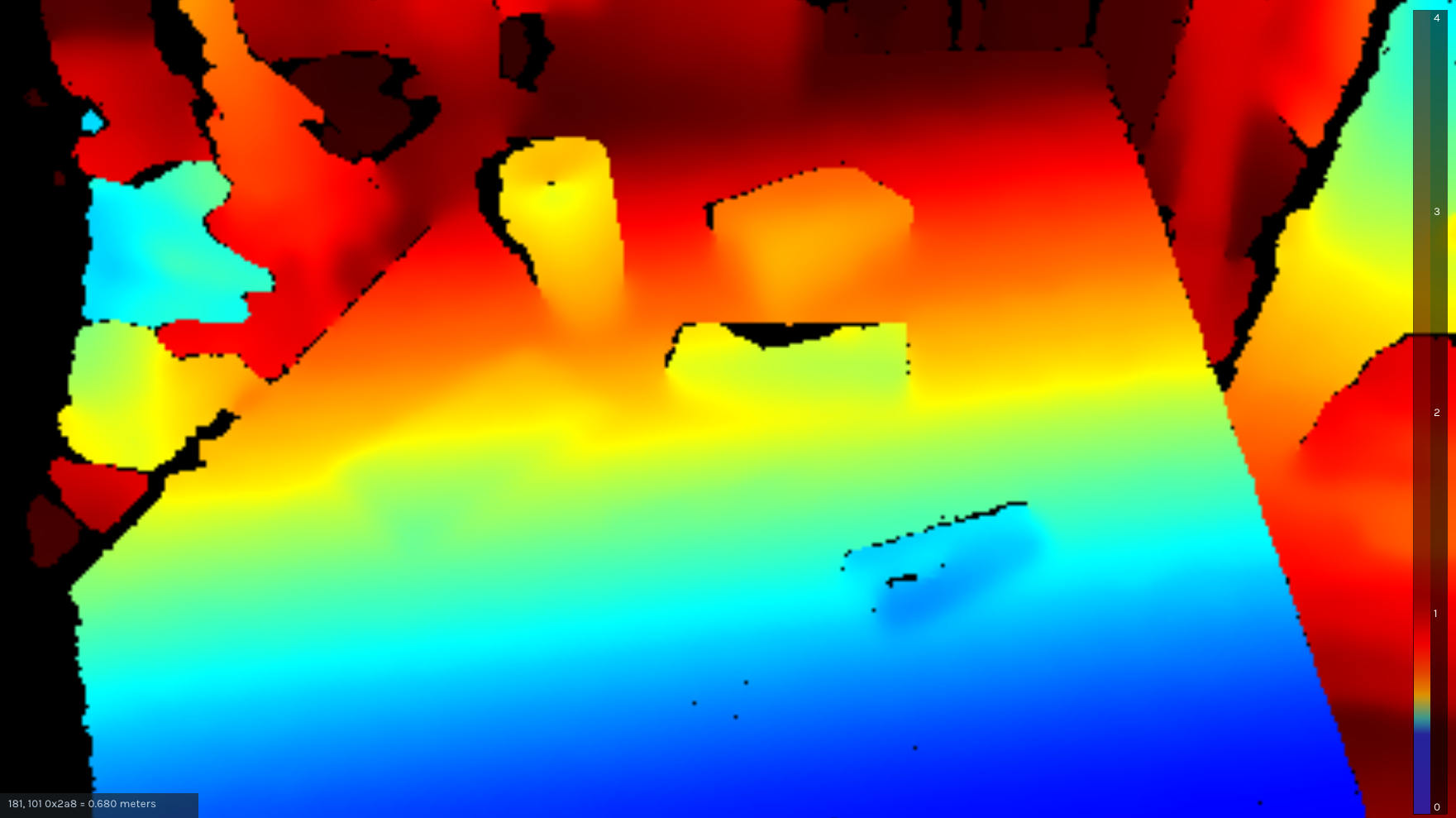
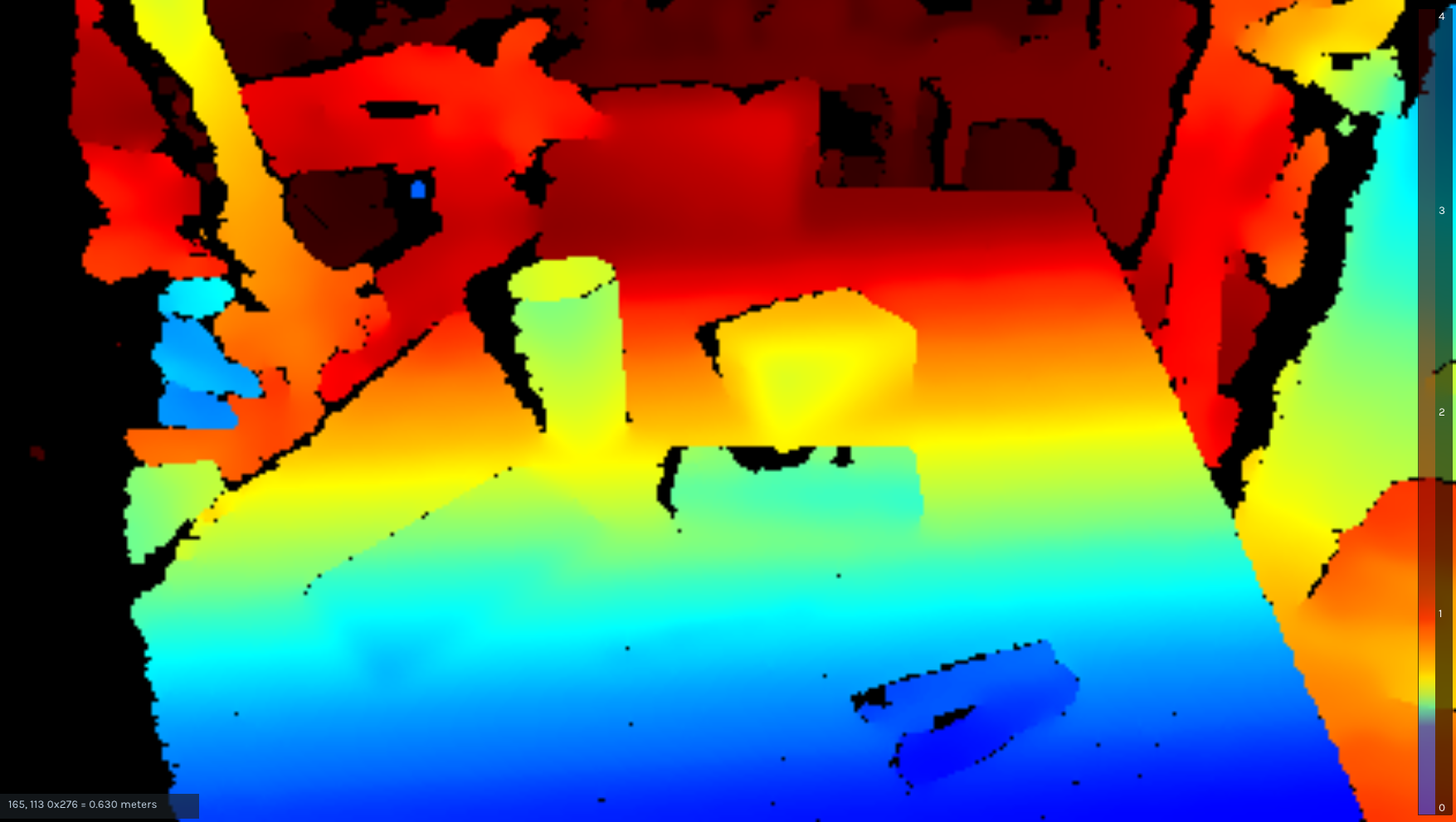
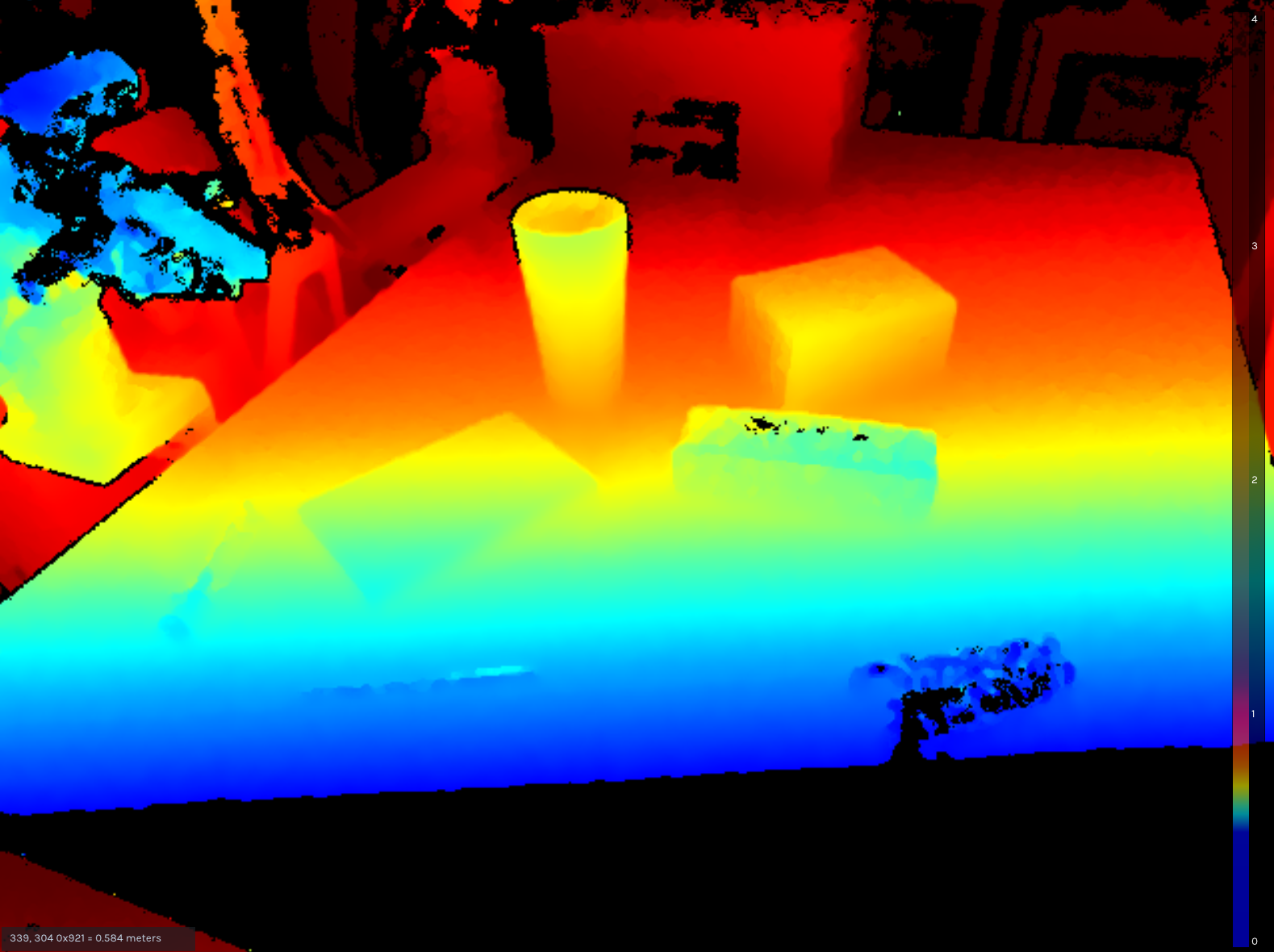
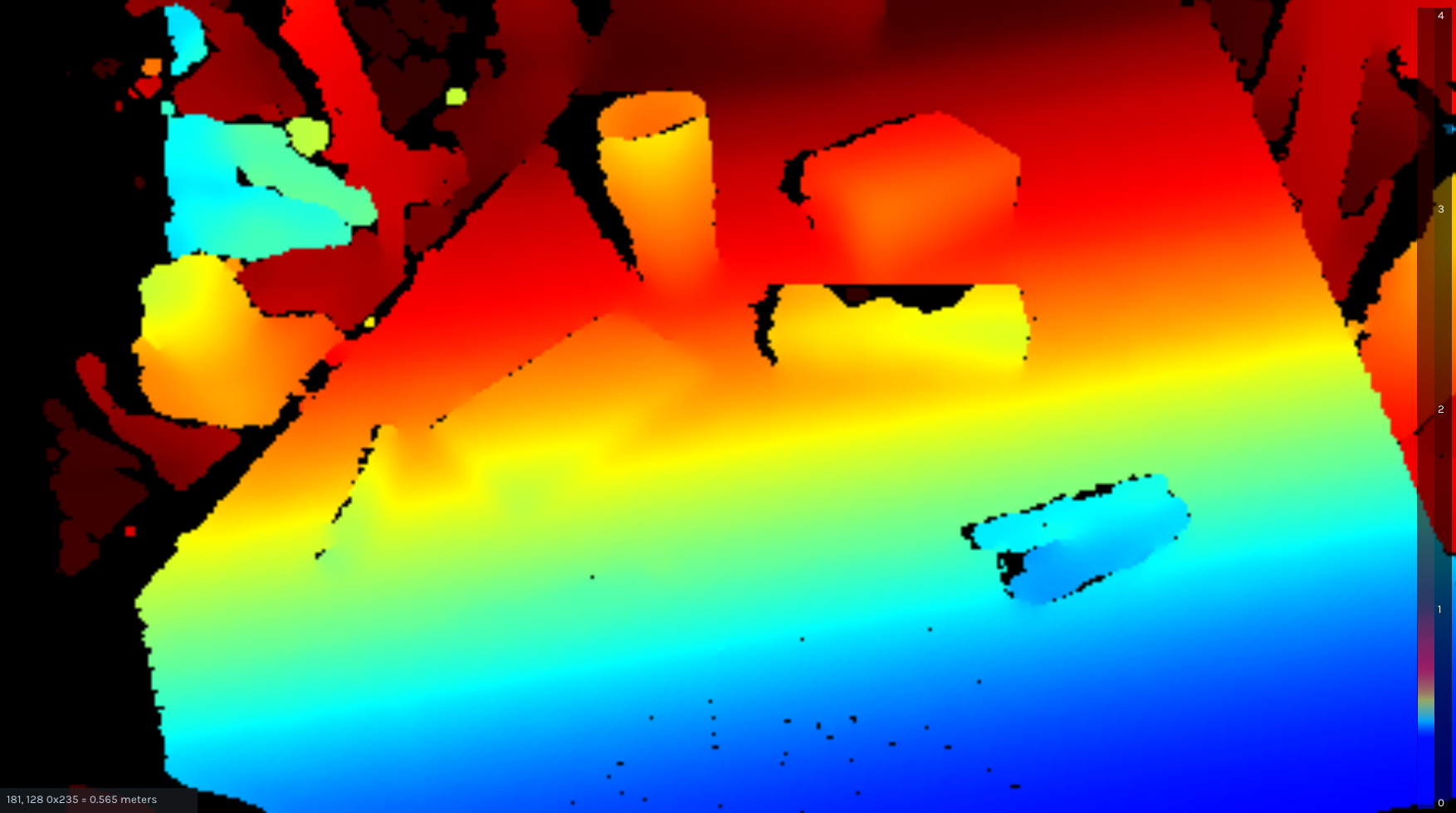
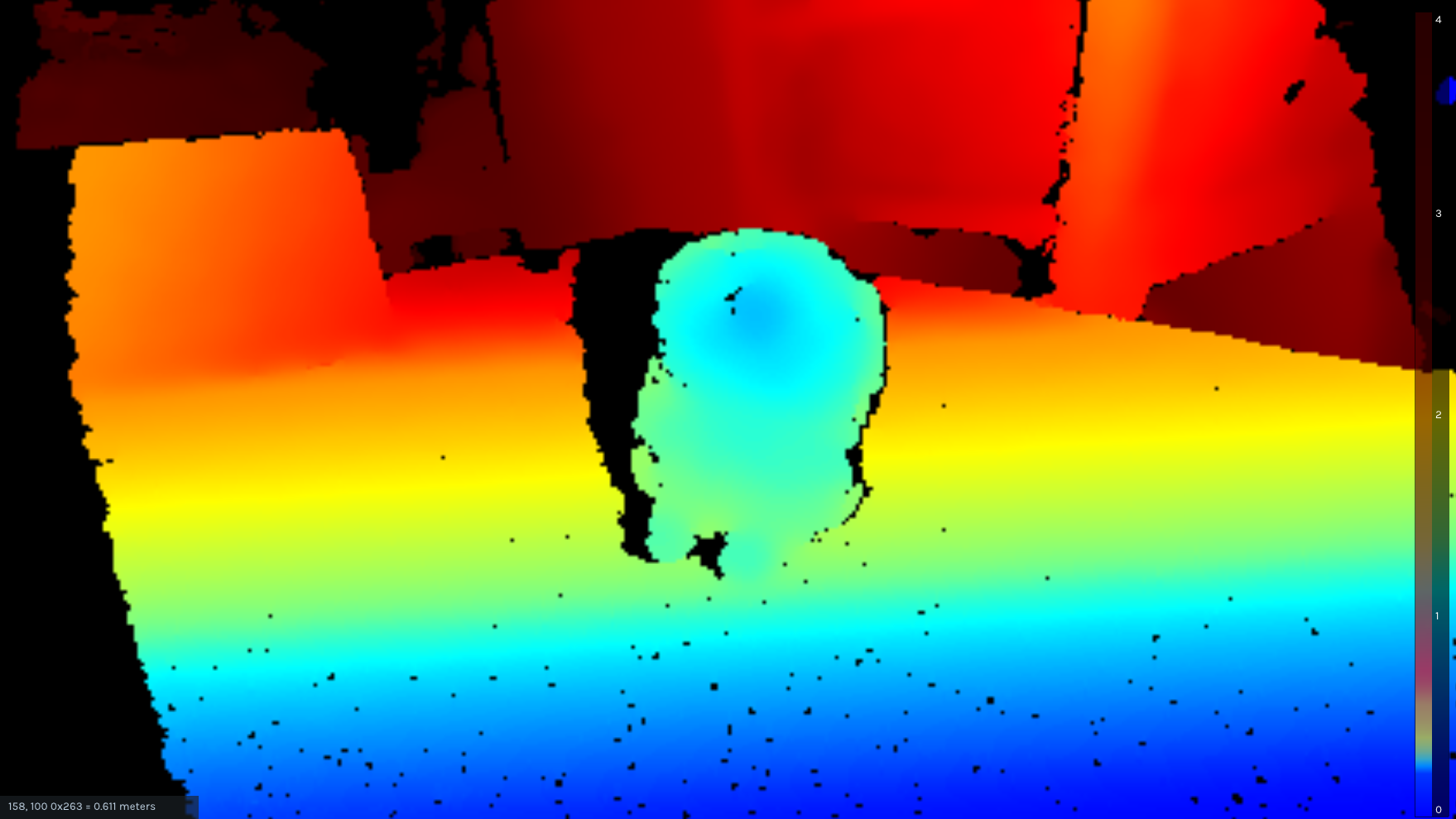
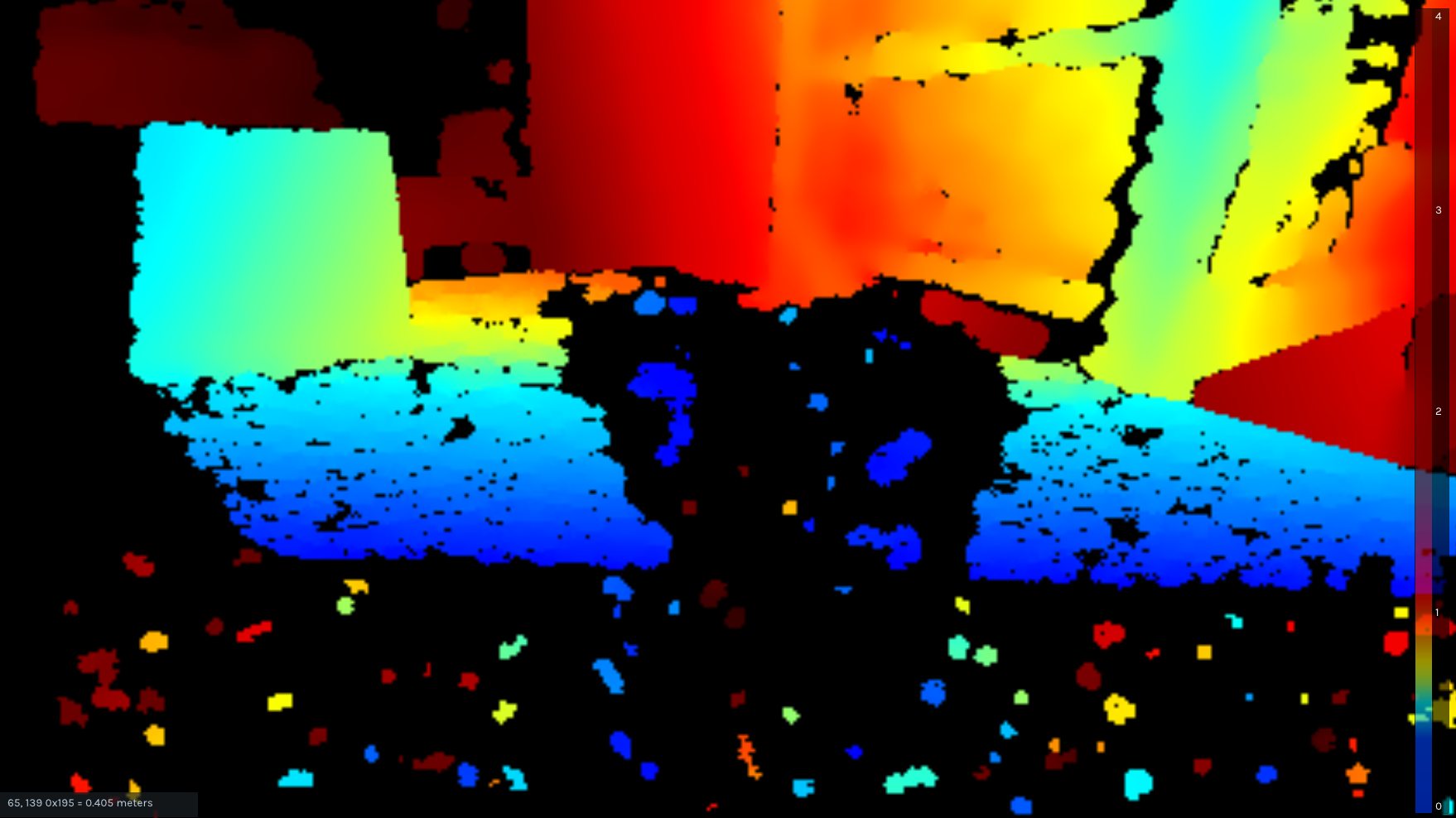
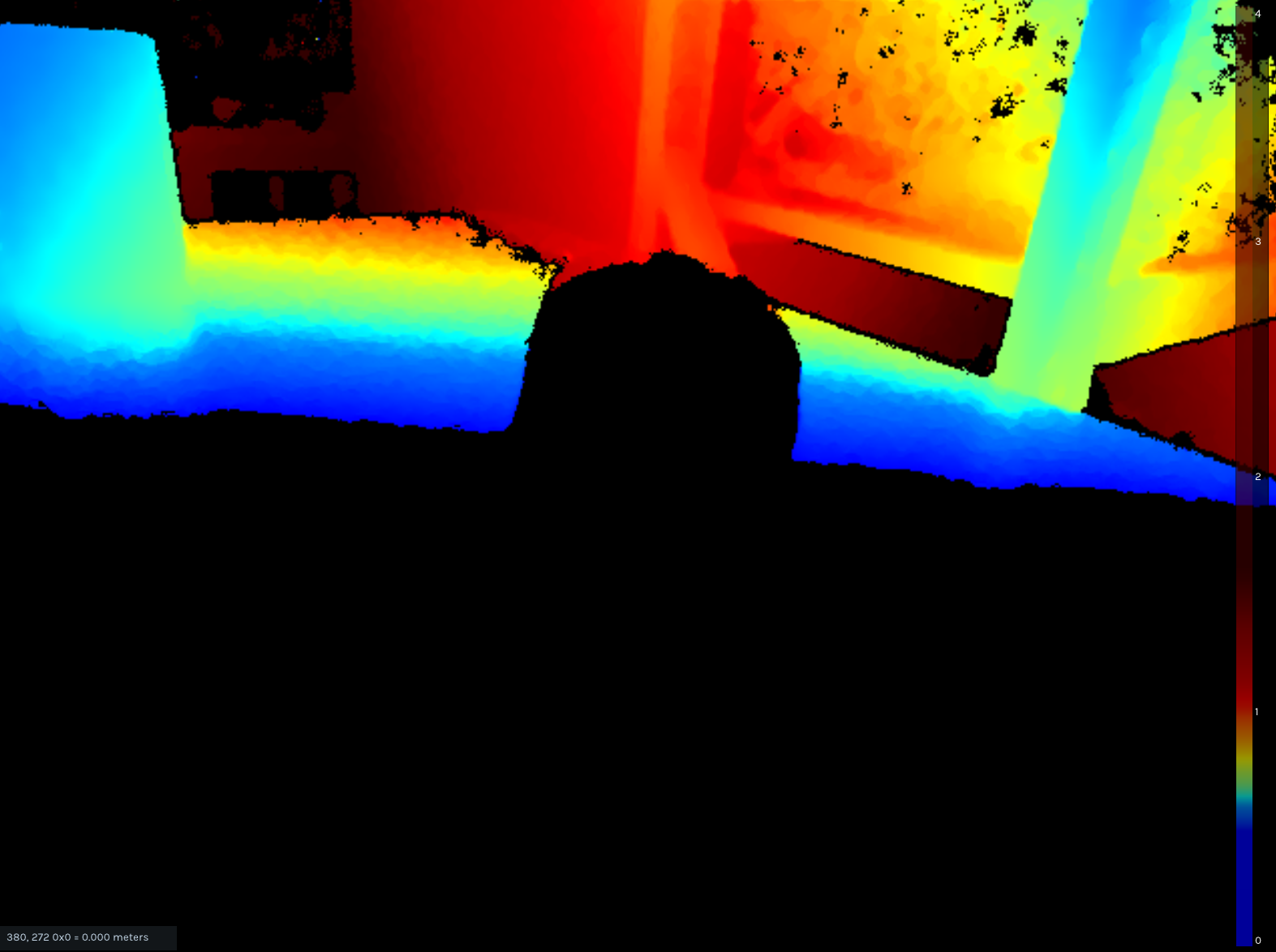
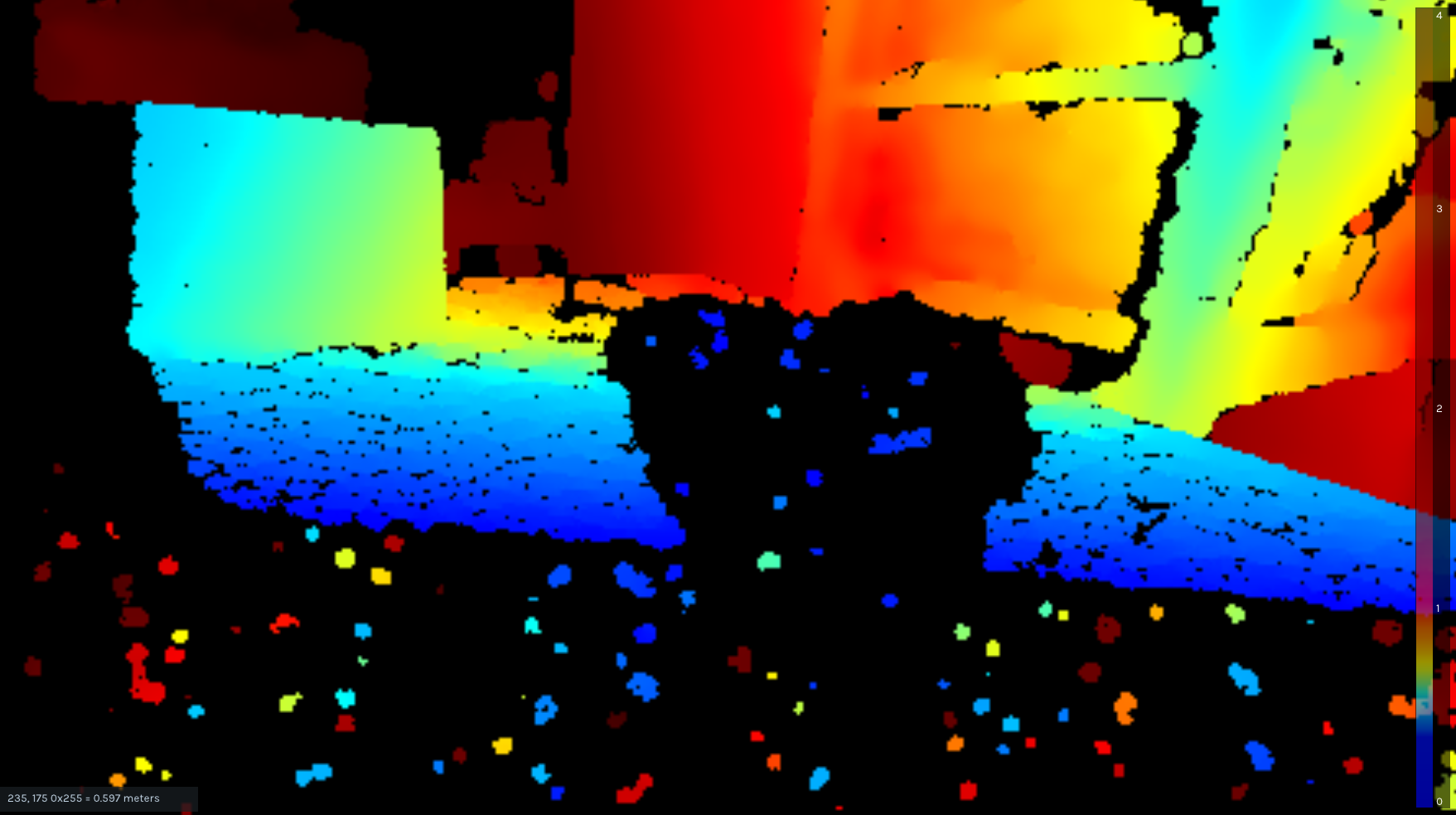
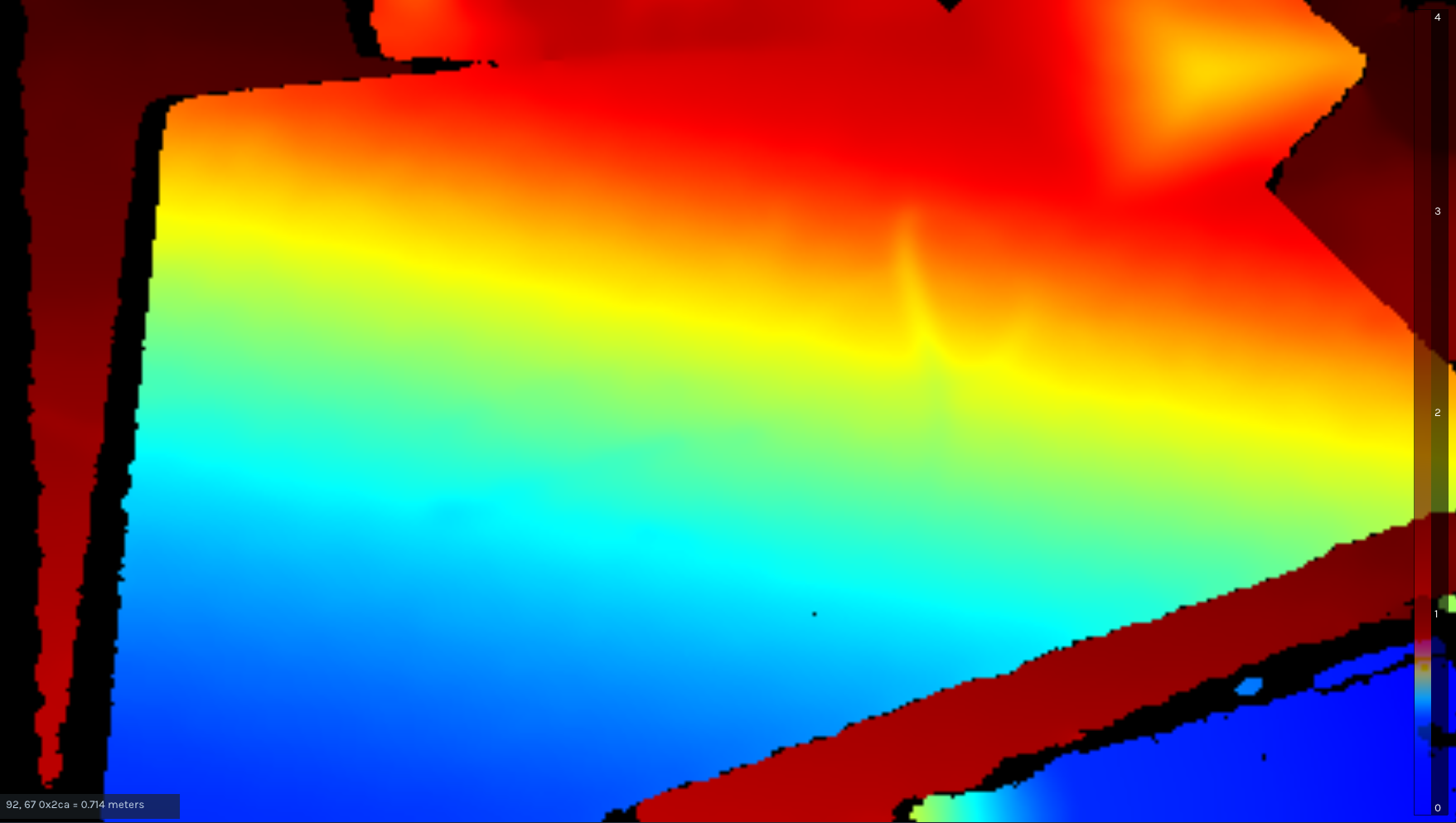
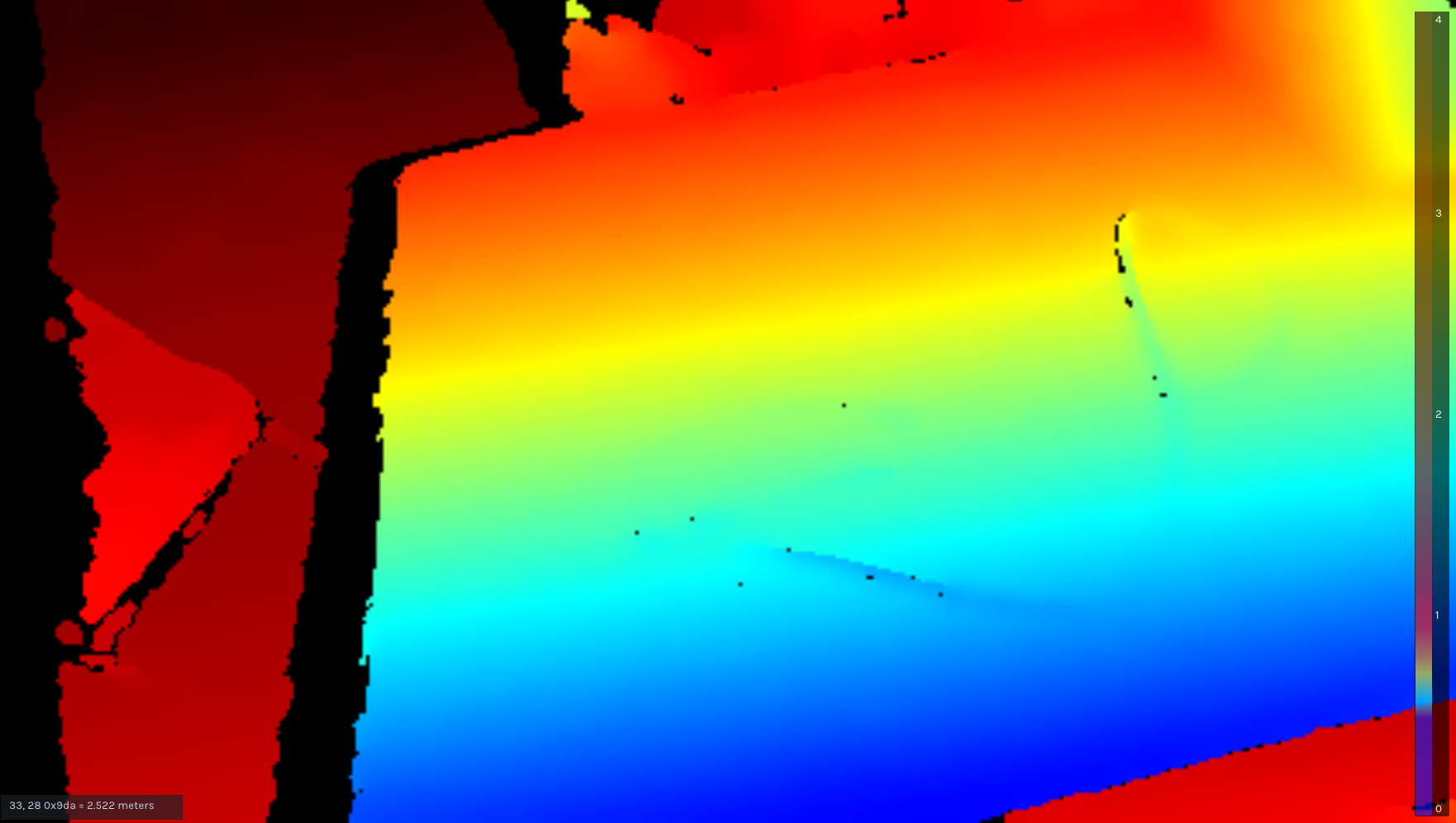
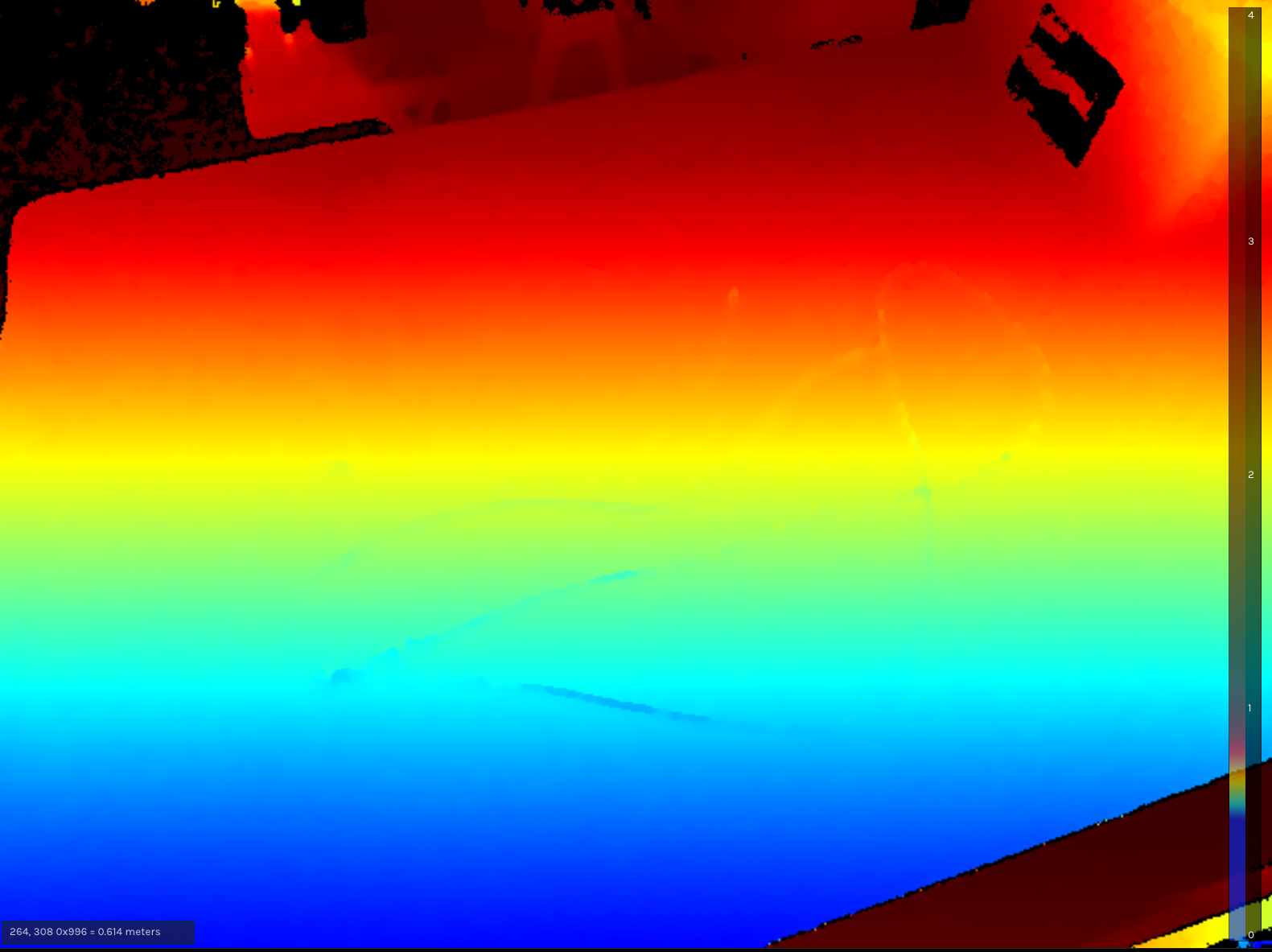
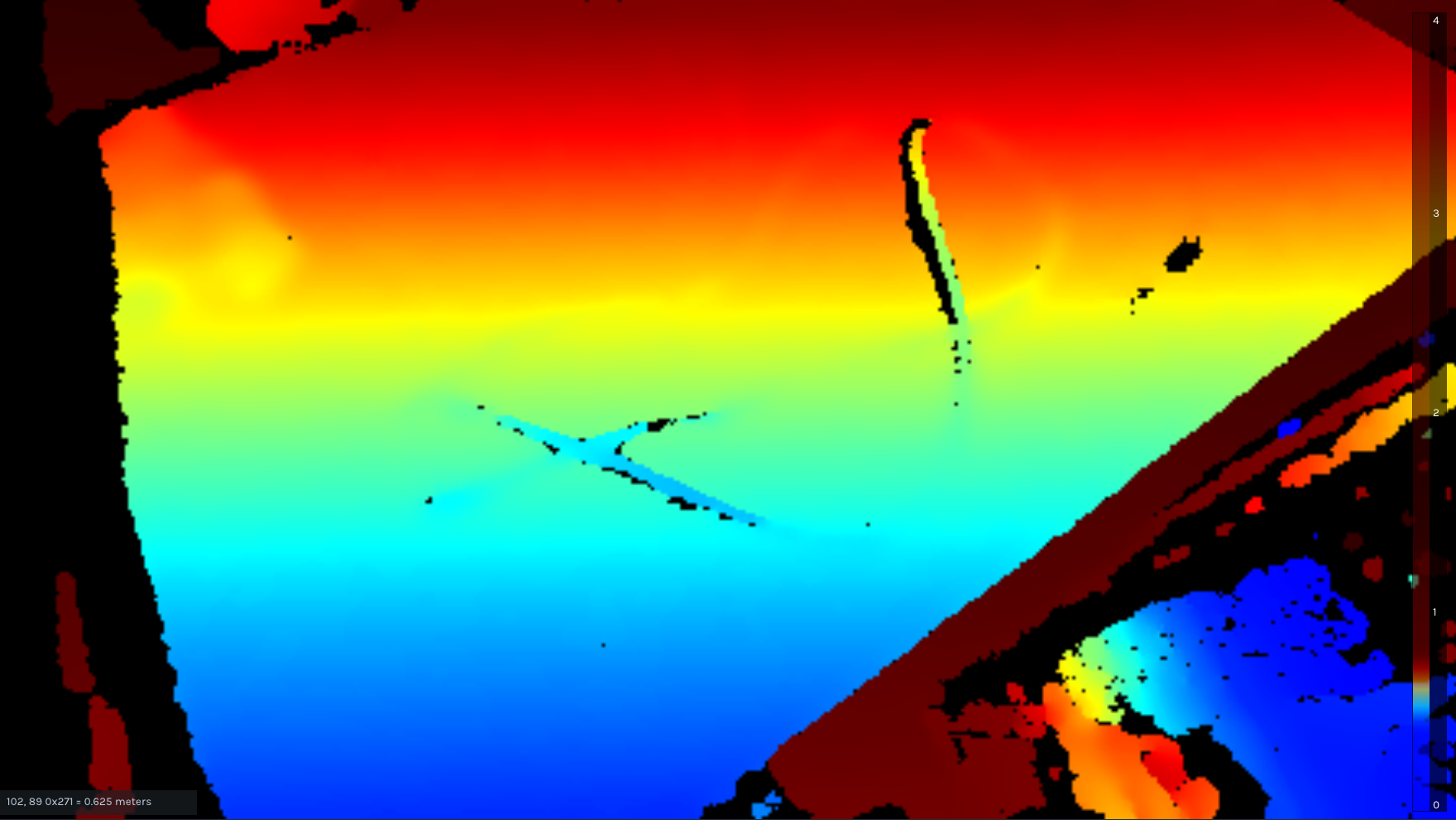
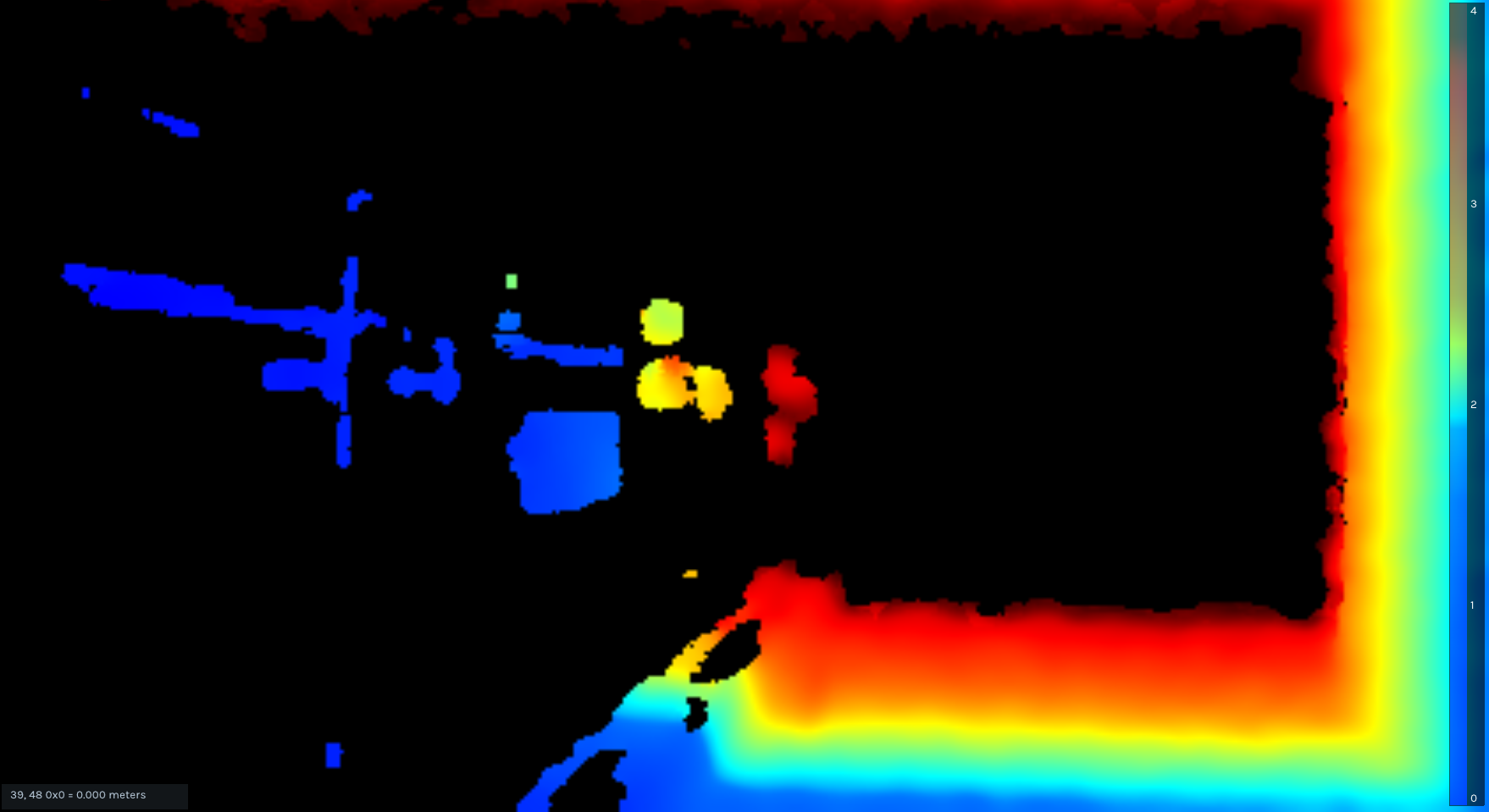
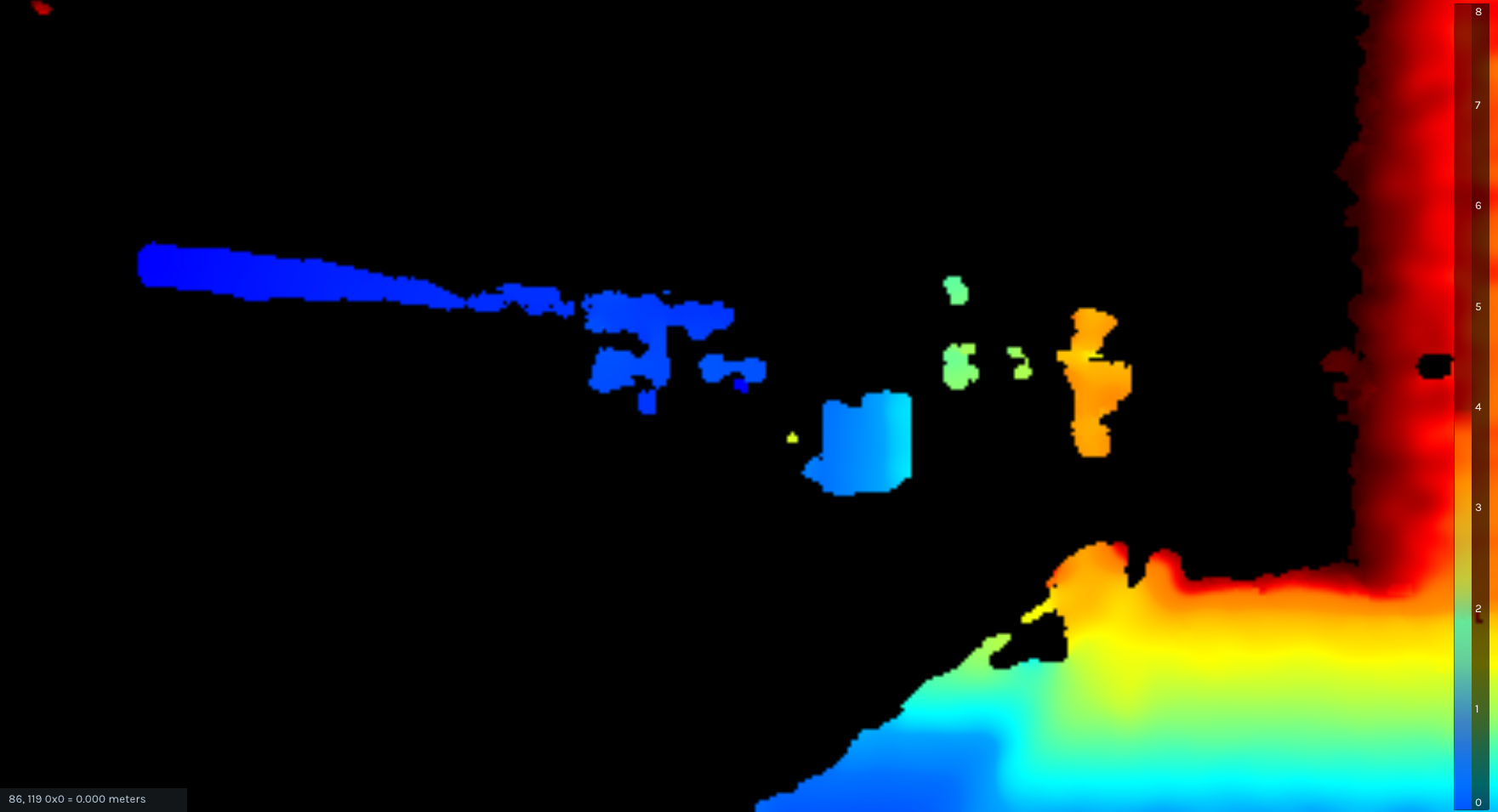
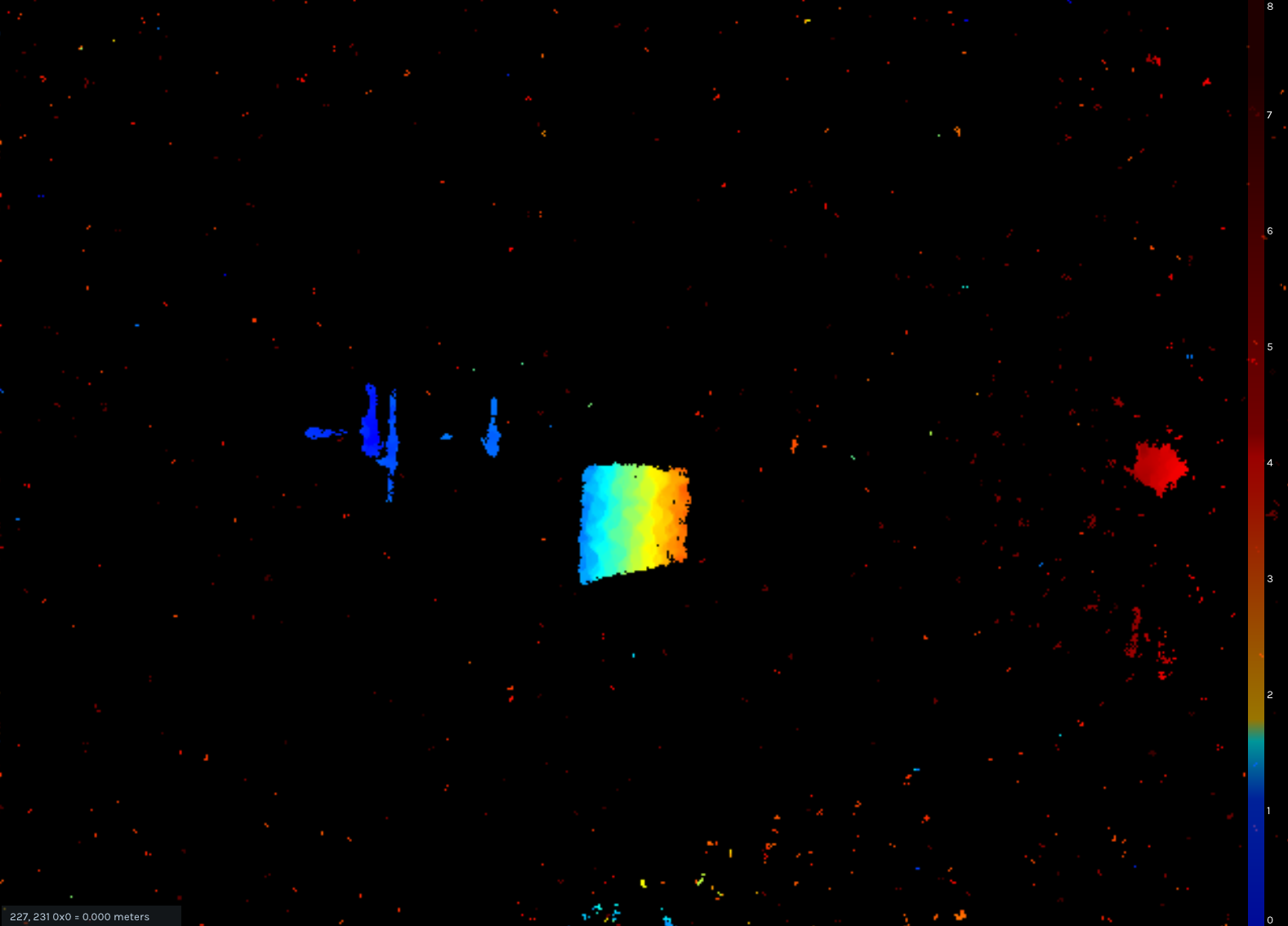
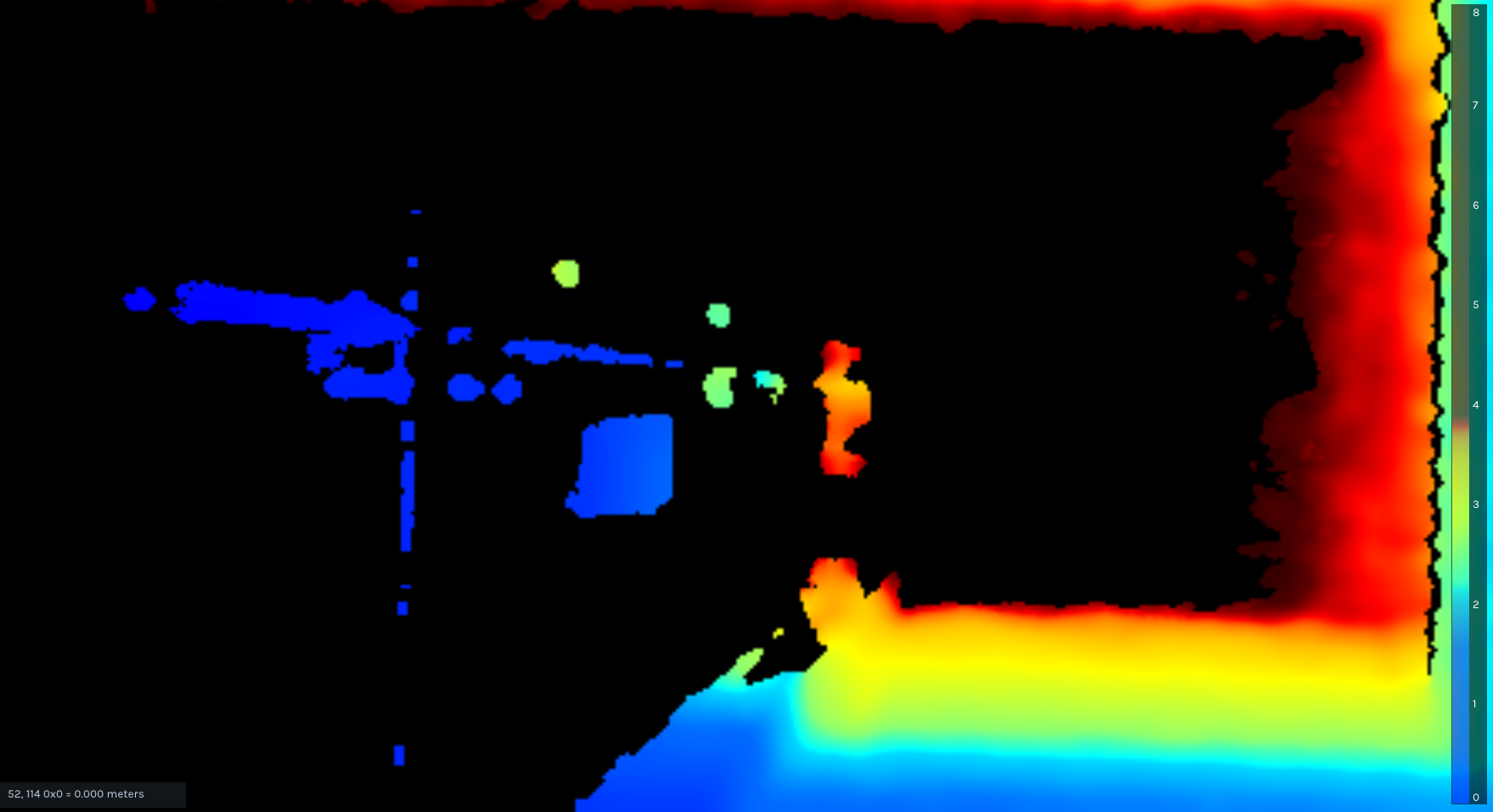
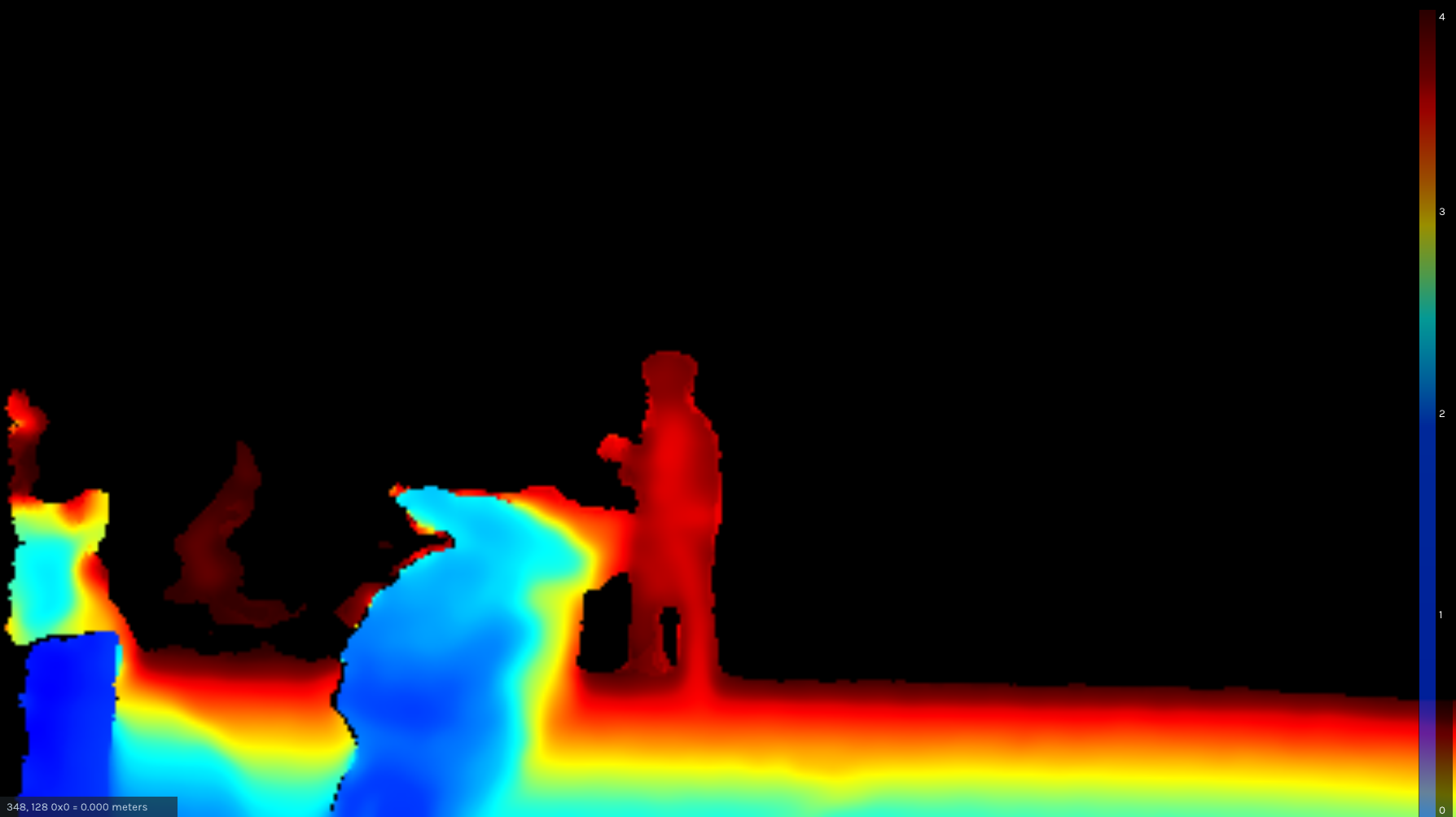
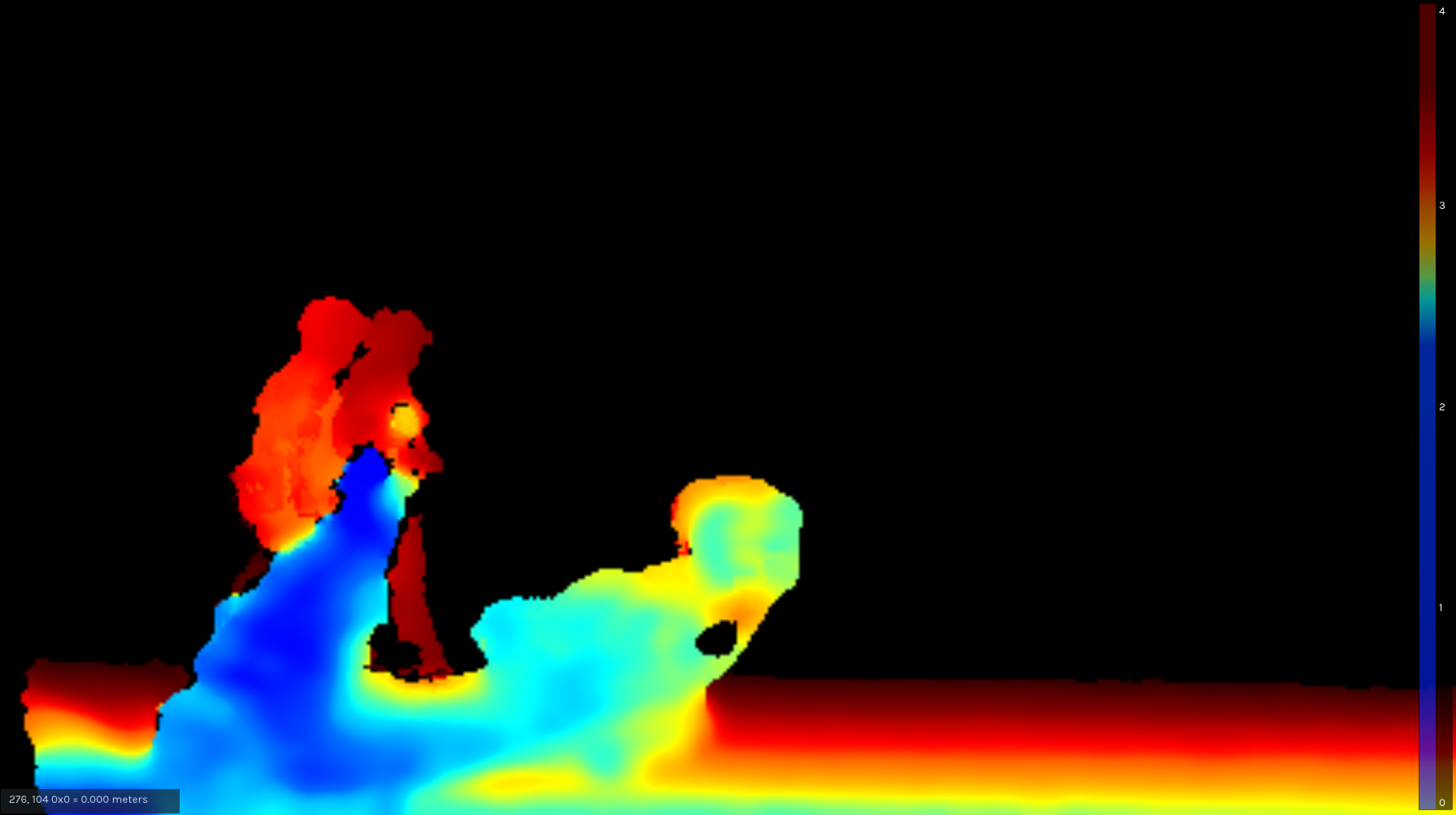
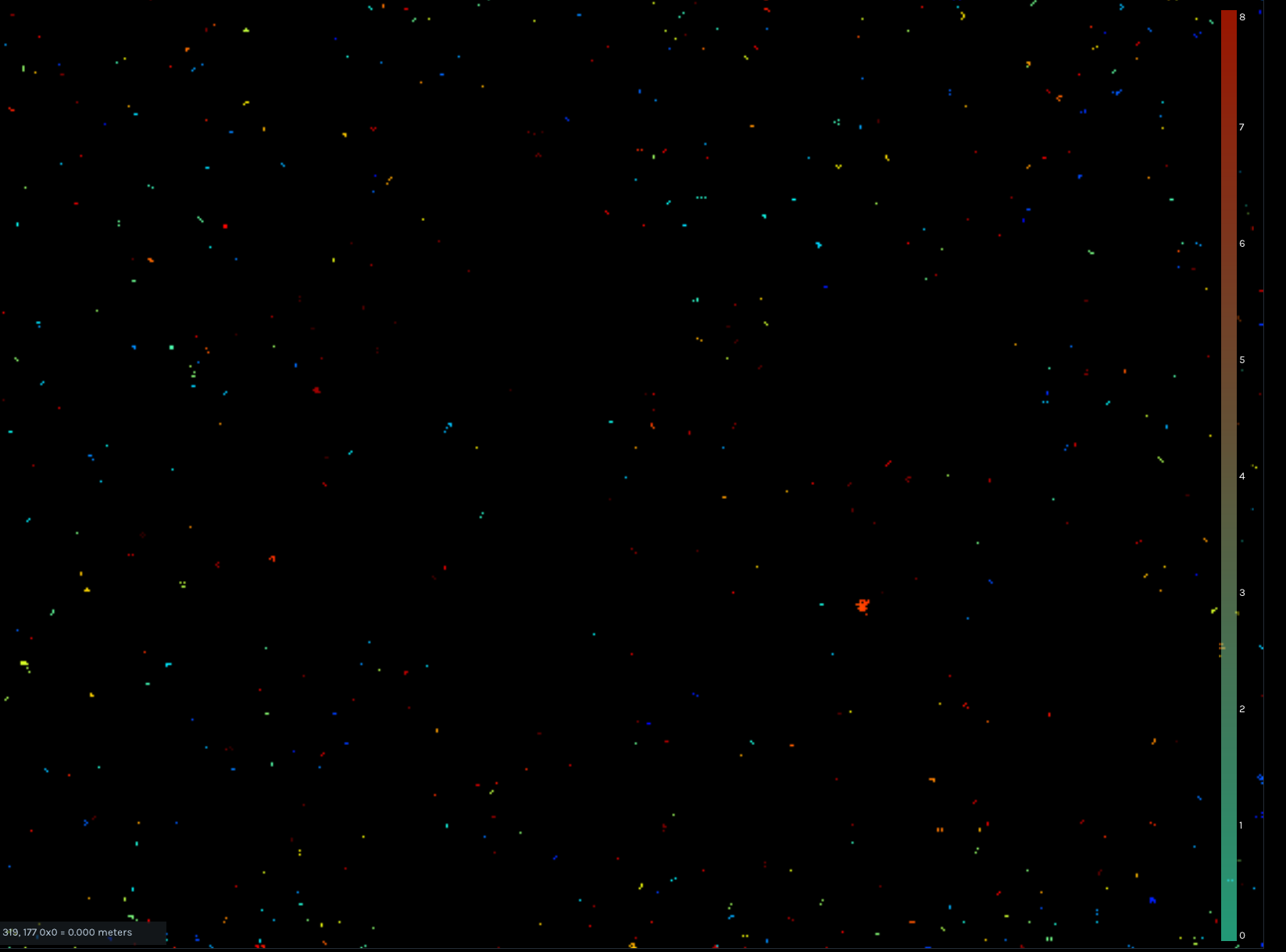
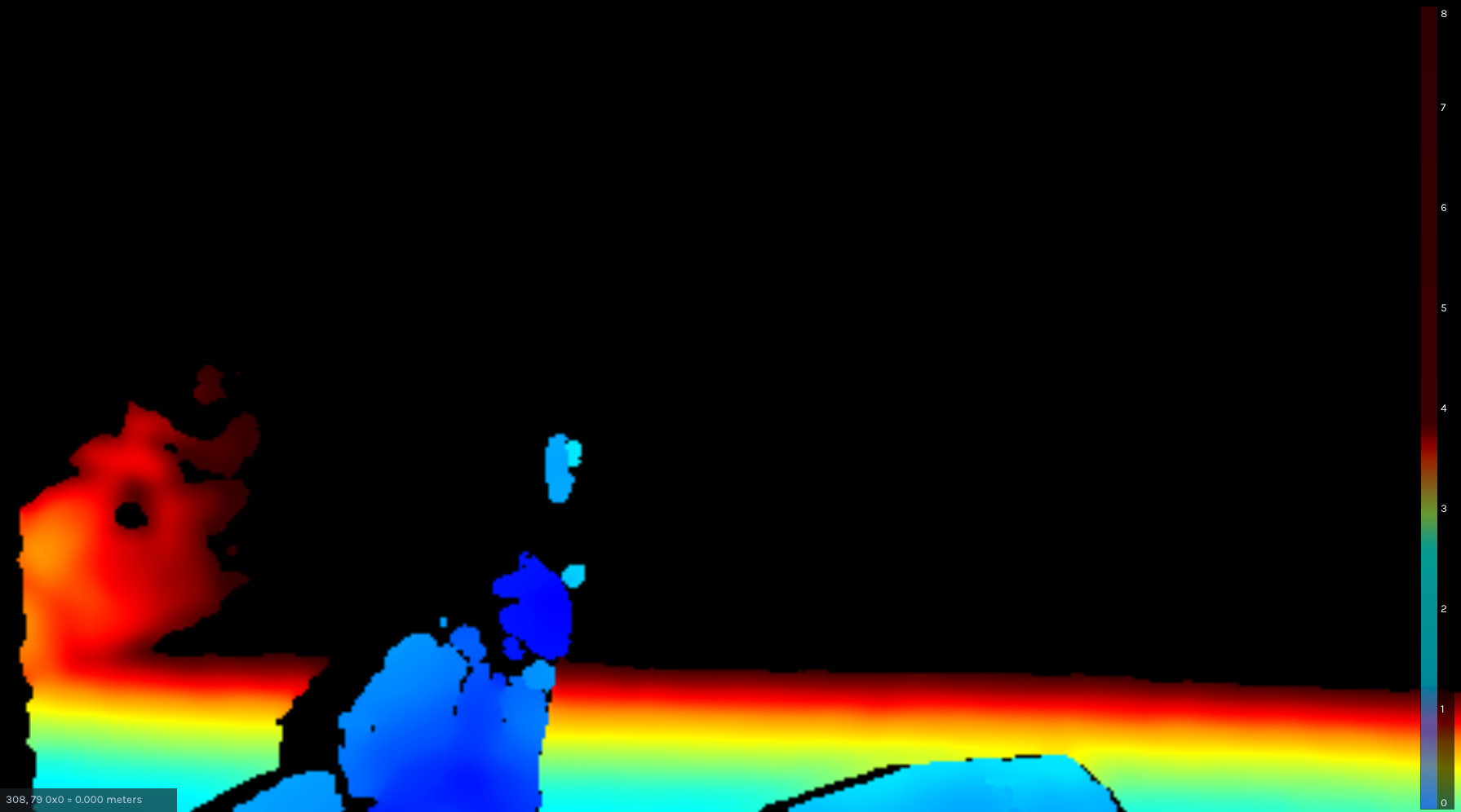
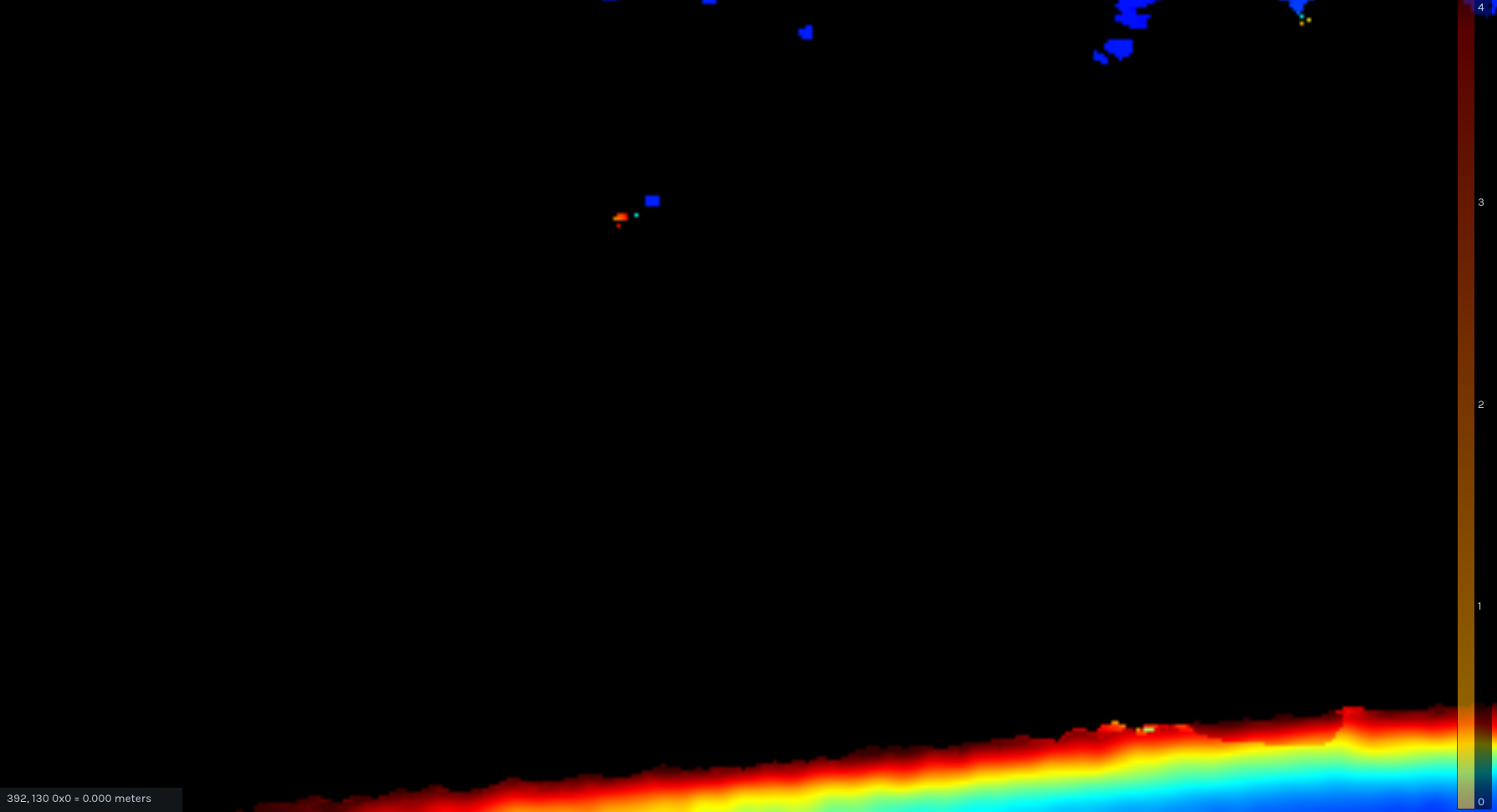
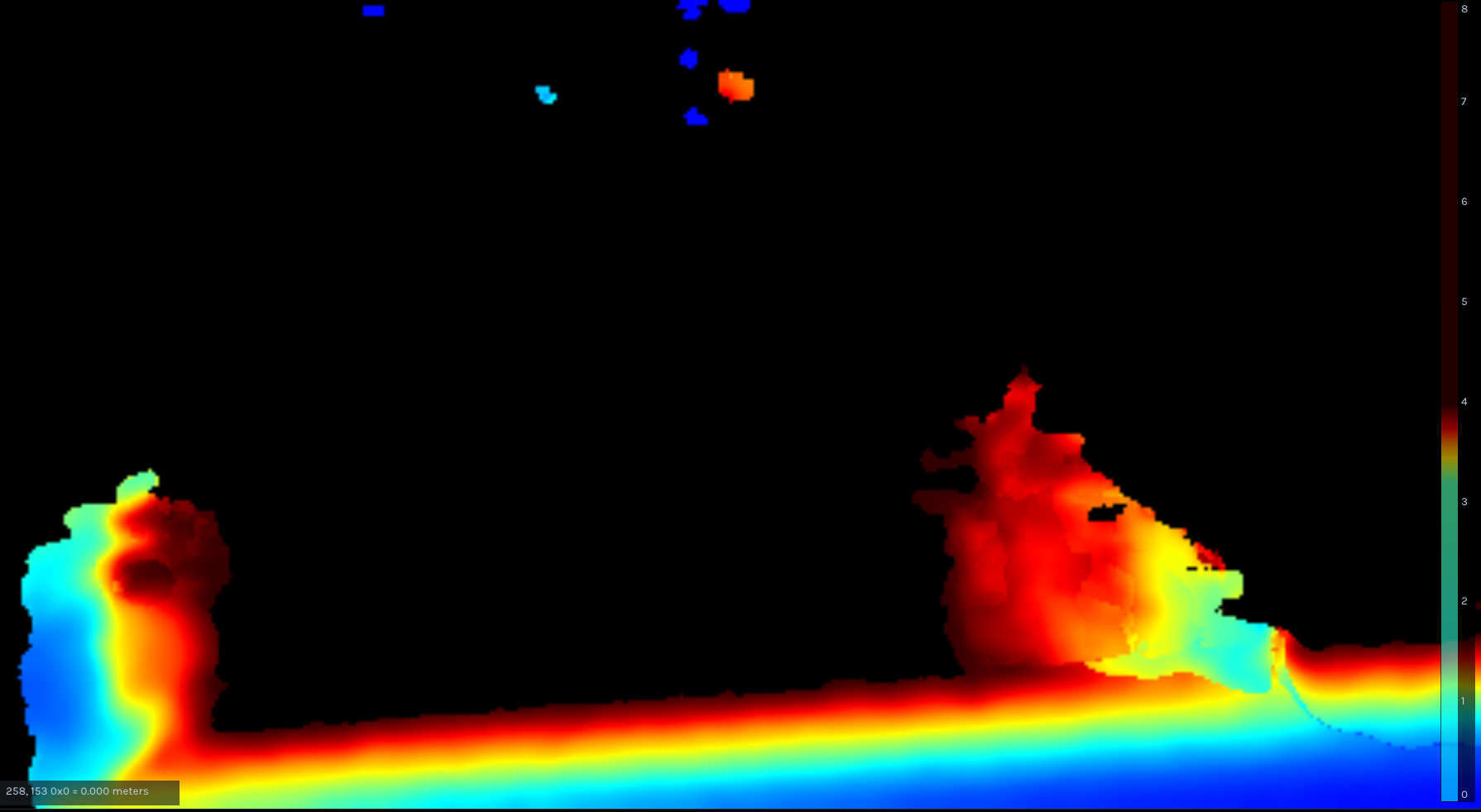
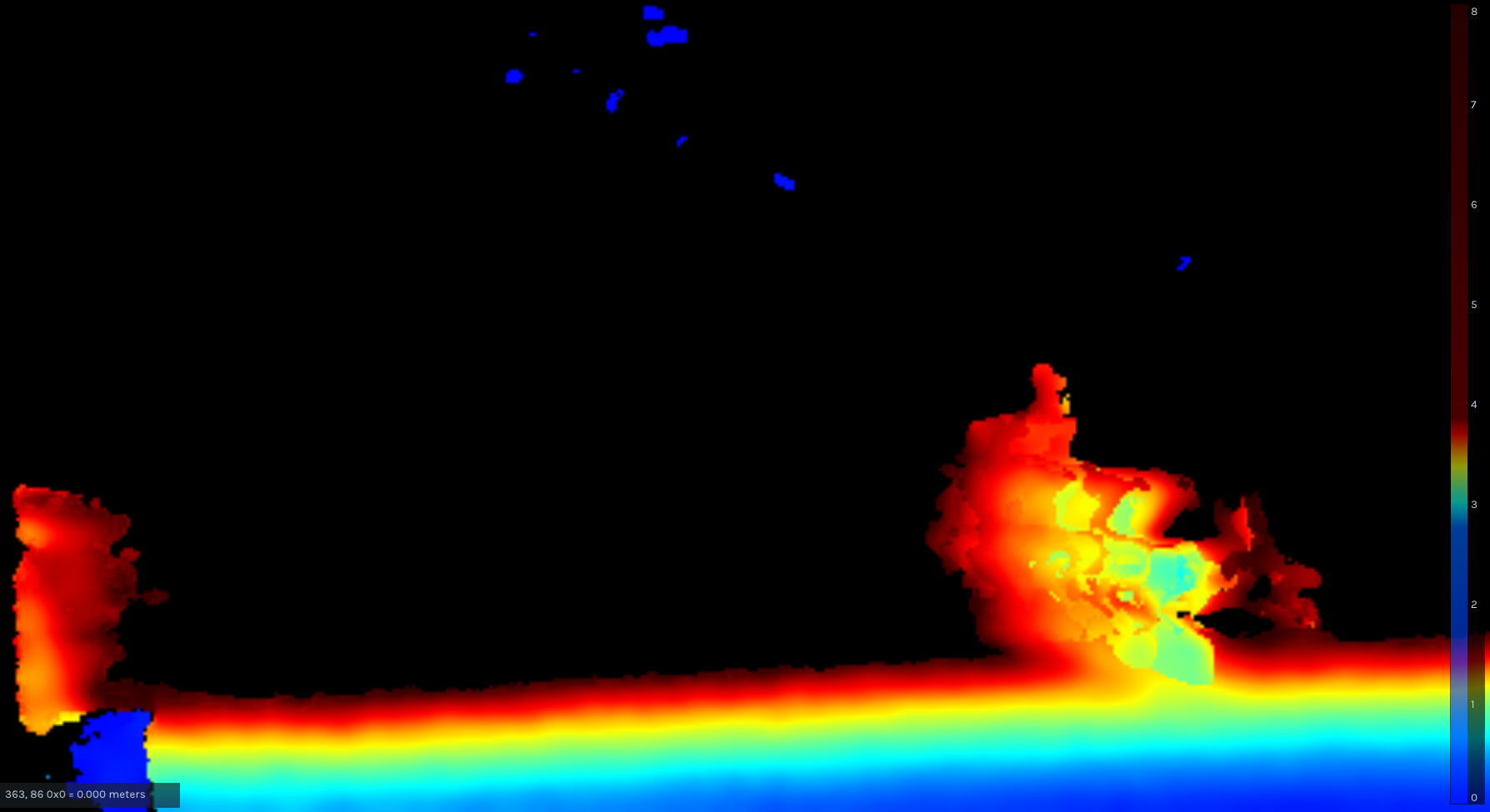
- Depth
| D435i | D456 | L515 | D555 |
|---|---|---|---|
 |
 |
 |
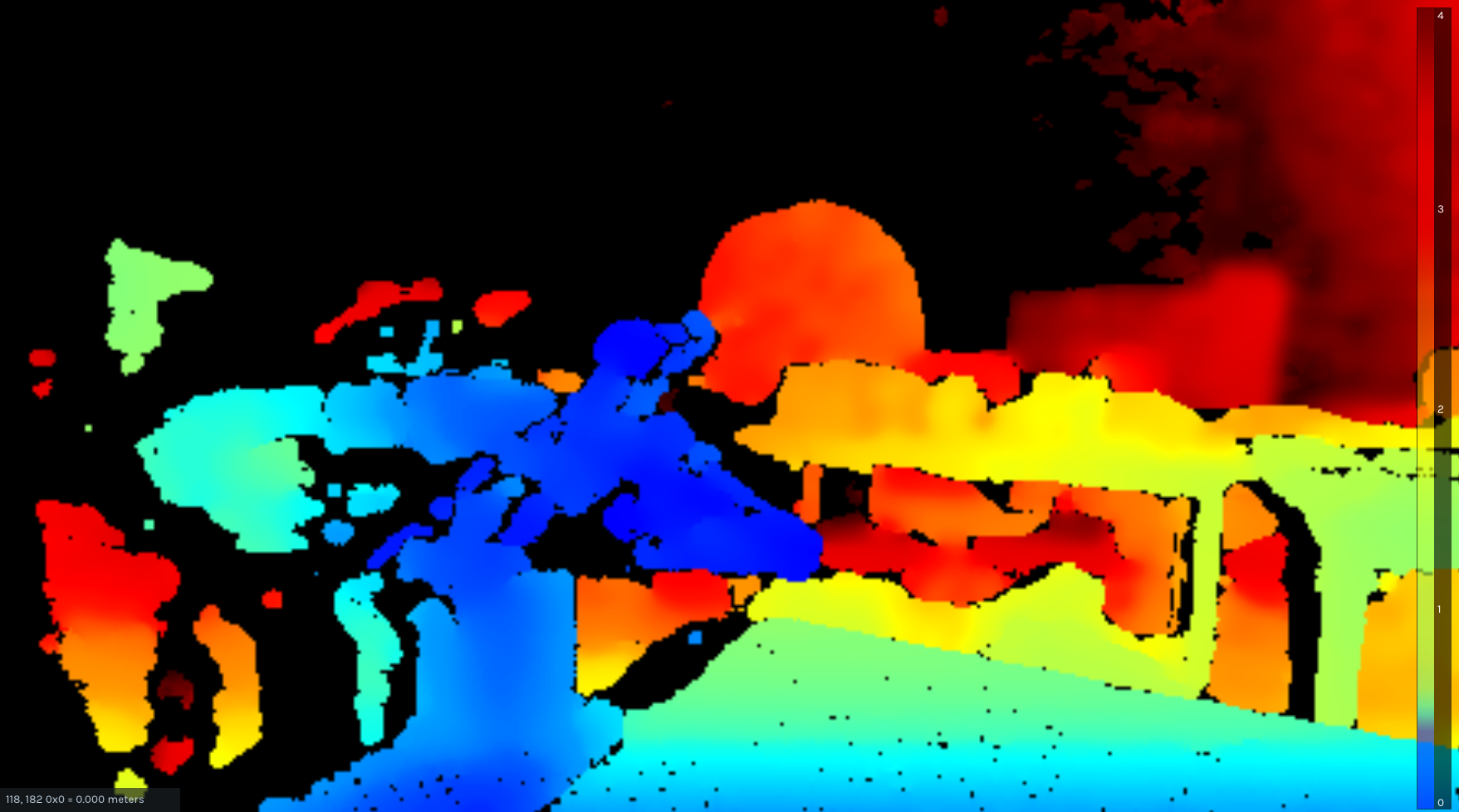 |
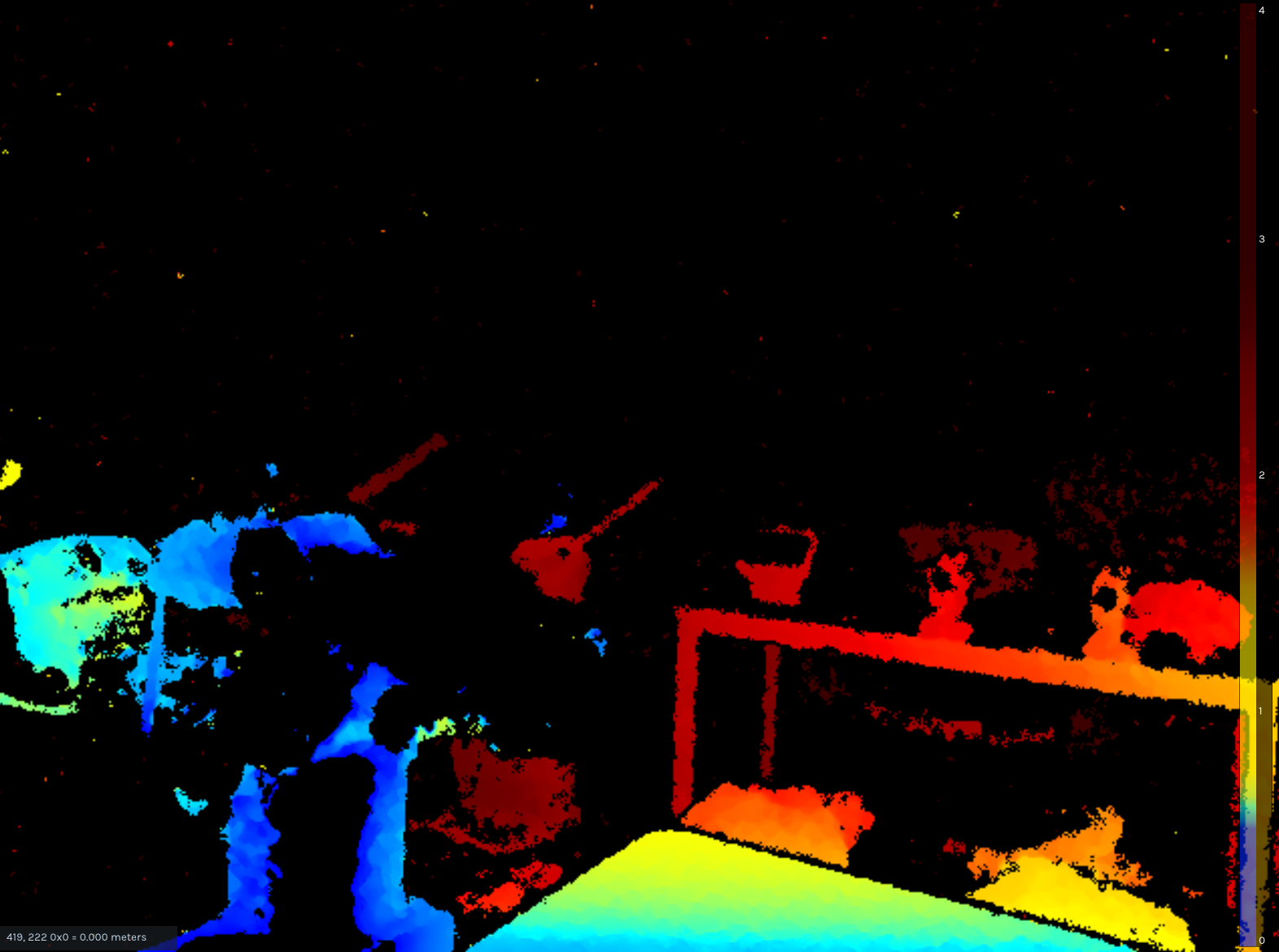
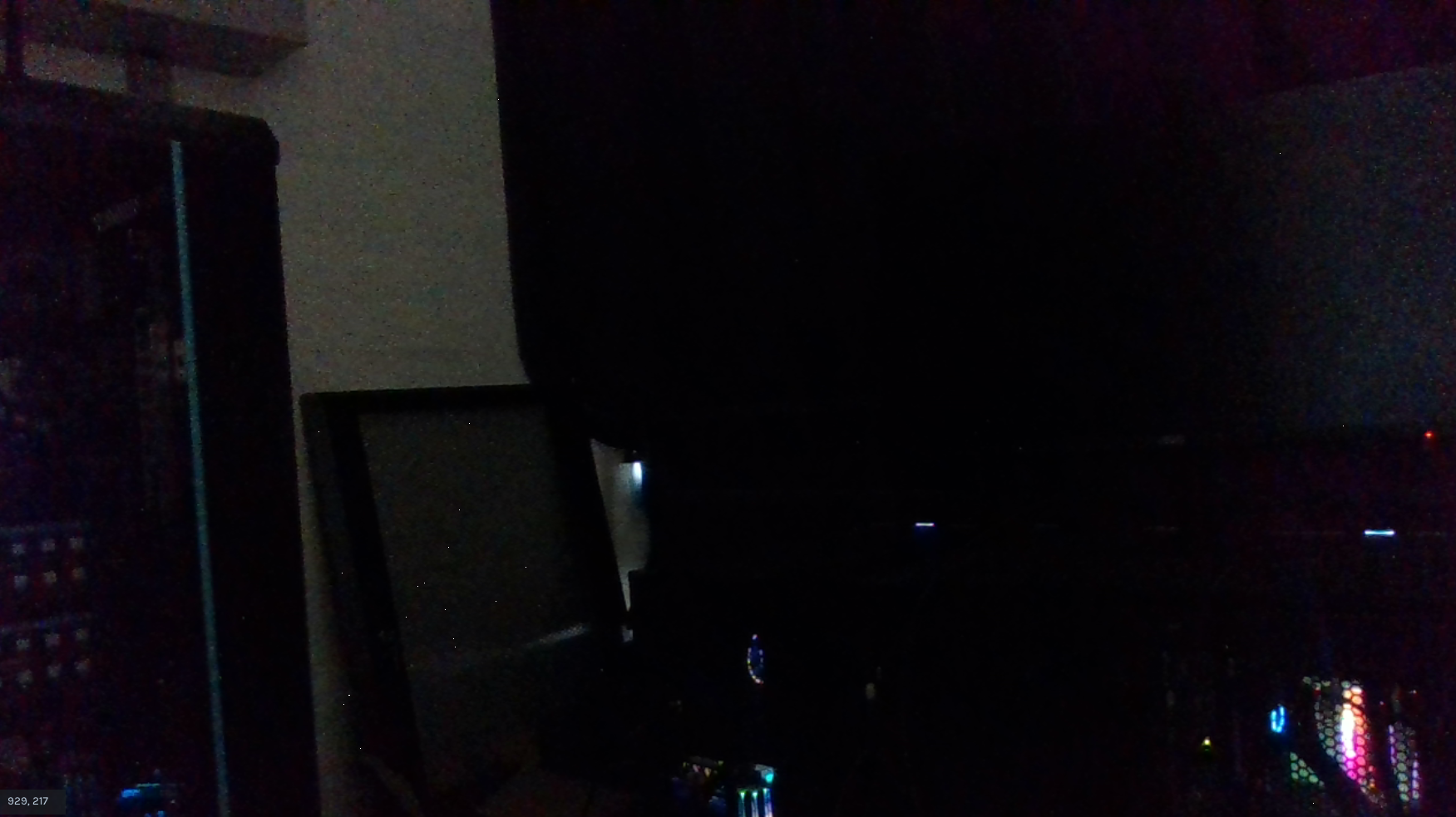
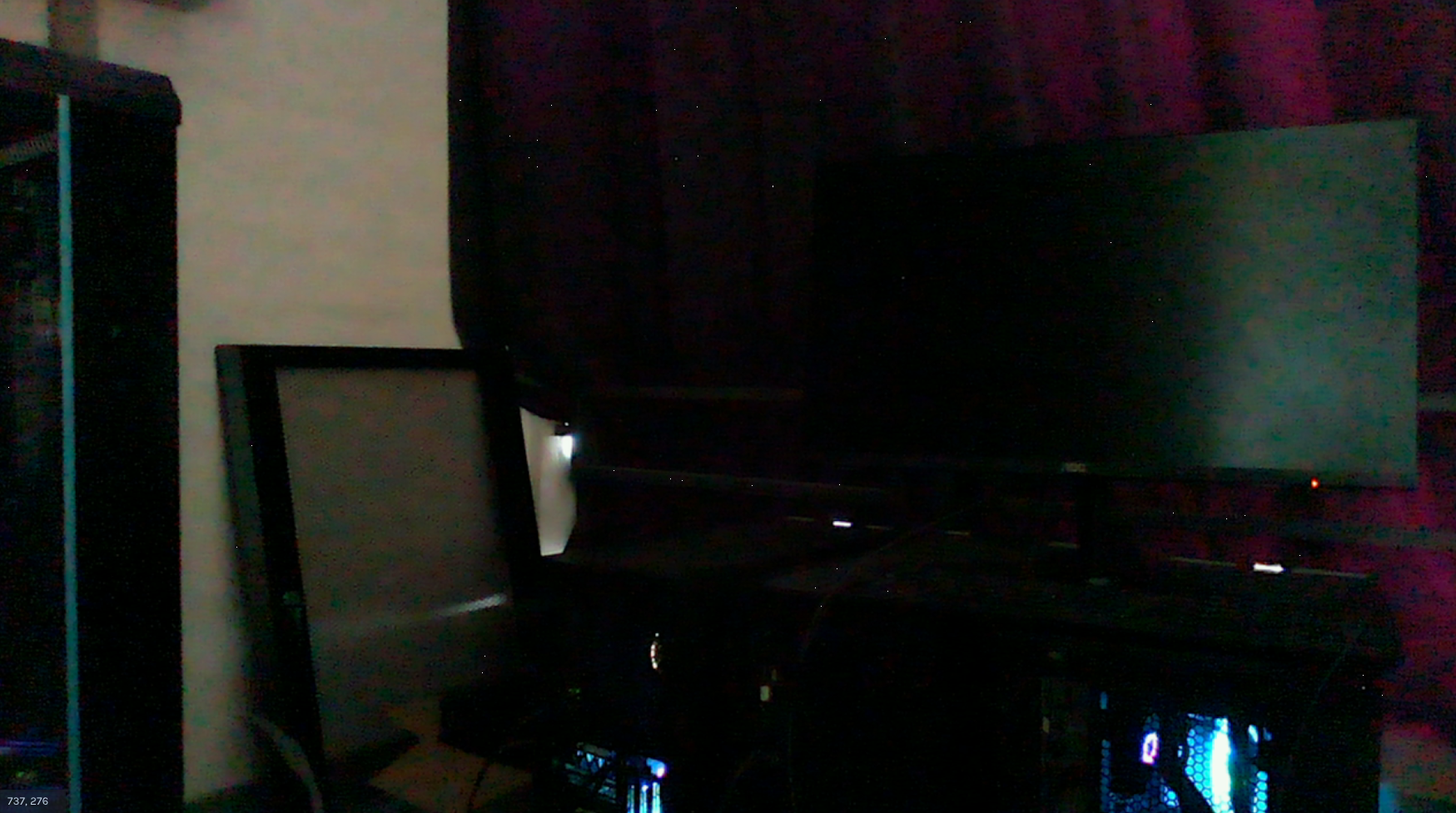
3.1.2 光照不足
- RGB - Action 5 Pro

- RGB
| D435i | D456 | L515 | D555 |
|---|---|---|---|
 |
 |
 |
 |
- Depth
| D435i | D456 | L515 | D555 |
|---|---|---|---|
 |
 |
 |
 |
整理中,预计09月10日 3.2 室外场景
3.2.1 上午 6:00~11:00
- RGB - Action 5 Pro

- RGB
| D435i | D456 | L515 | D555 |
|---|---|---|---|
 |
 |
 |
 |
- Depth
| D435i | D456 | L515 | D555 |
|---|---|---|---|
 |
 |
 |
 |
3.2.2 中午 11:00~13:00
- RGB - Action 5 Pro
| D435i | D456 | L515 | D555 |
|---|---|---|---|
- Depth
| D435i | D456 | L515 | D555 |
|---|---|---|---|
3.2.3 下午 13:00~18:00
- RGB - Action 5 Pro
| D435i | D456 | L515 | D555 |
|---|---|---|---|
- Depth
| D435i | D456 | L515 | D555 |
|---|---|---|---|
3.2.4 夜间 20:00~24:00
- RGB - Action 5 Pro

- RGB
| D435i | D456 | L515 | D555 |
|---|---|---|---|
 |
 |
 |
 |
- Depth
| D435i | D456 | L515 | D555 |
|---|---|---|---|
 |
 |
 |
 |
3.3 静态物体
3.3.1 规则物体
- RGB - Action 5 Pro

- RGB
| D435i | D456 | L515 | D555 |
|---|---|---|---|
 |
 |
 |
 |
- Depth
| D435i | D456 | L515 | D555 |
|---|---|---|---|
 |
 |
 |
 |
3.3.2 毛绒玩具
- RGB - Action 5 Pro

- RGB
| D435i | D456 | L515 | D555 |
|---|---|---|---|
 |
 |
 |
 |
- Depth
| D435i | D456 | L515 | D555 |
|---|---|---|---|
 |
 |
 |
 |
3.3.4 金属表面
- RGBD - Action 5 Pro
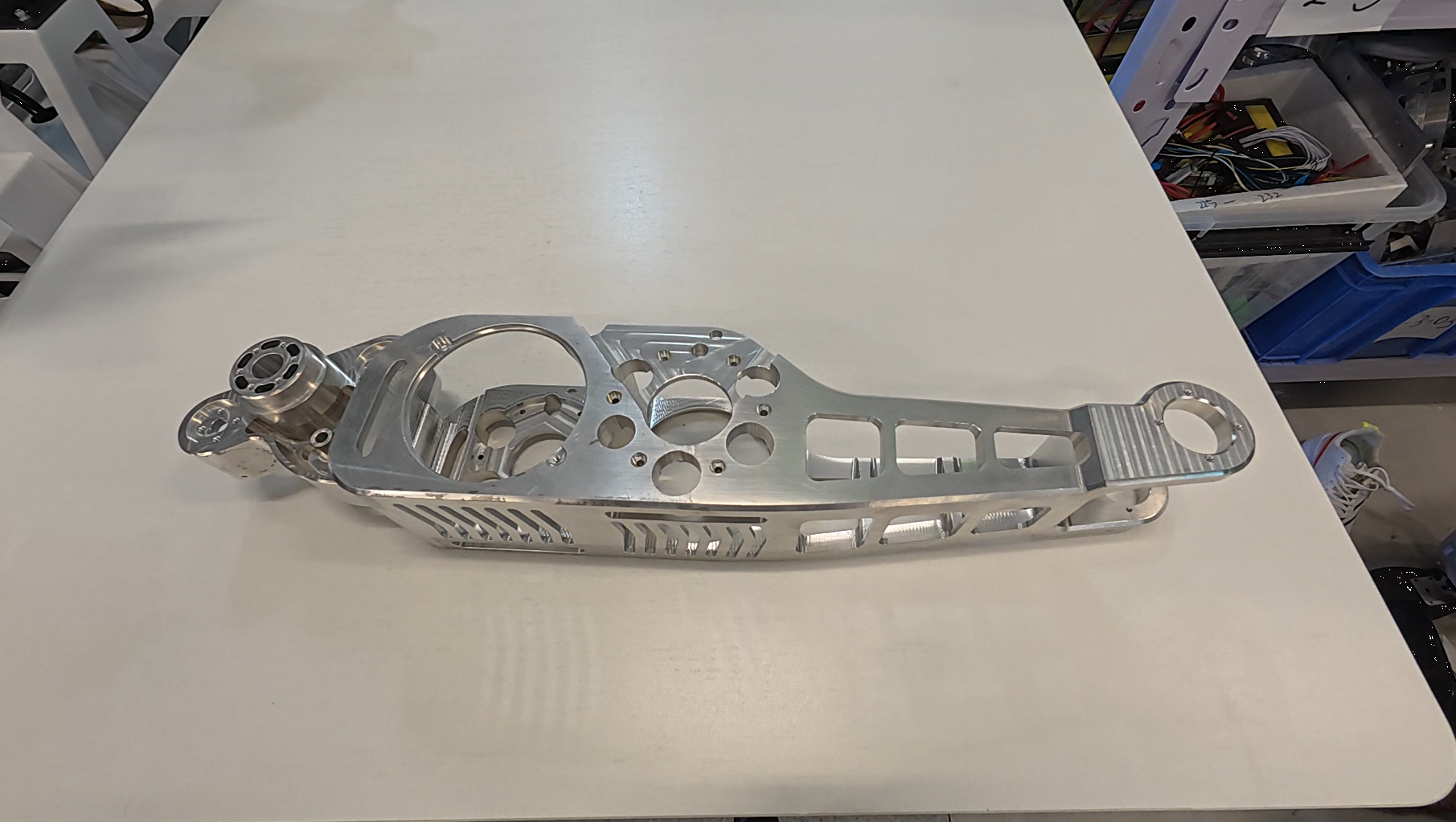
- RGB
| D435i | D456 | L515 | D555 |
|---|---|---|---|
 |
 |
 |
 |
- Depth
| D435i | D456 | L515 | D555 |
|---|---|---|---|
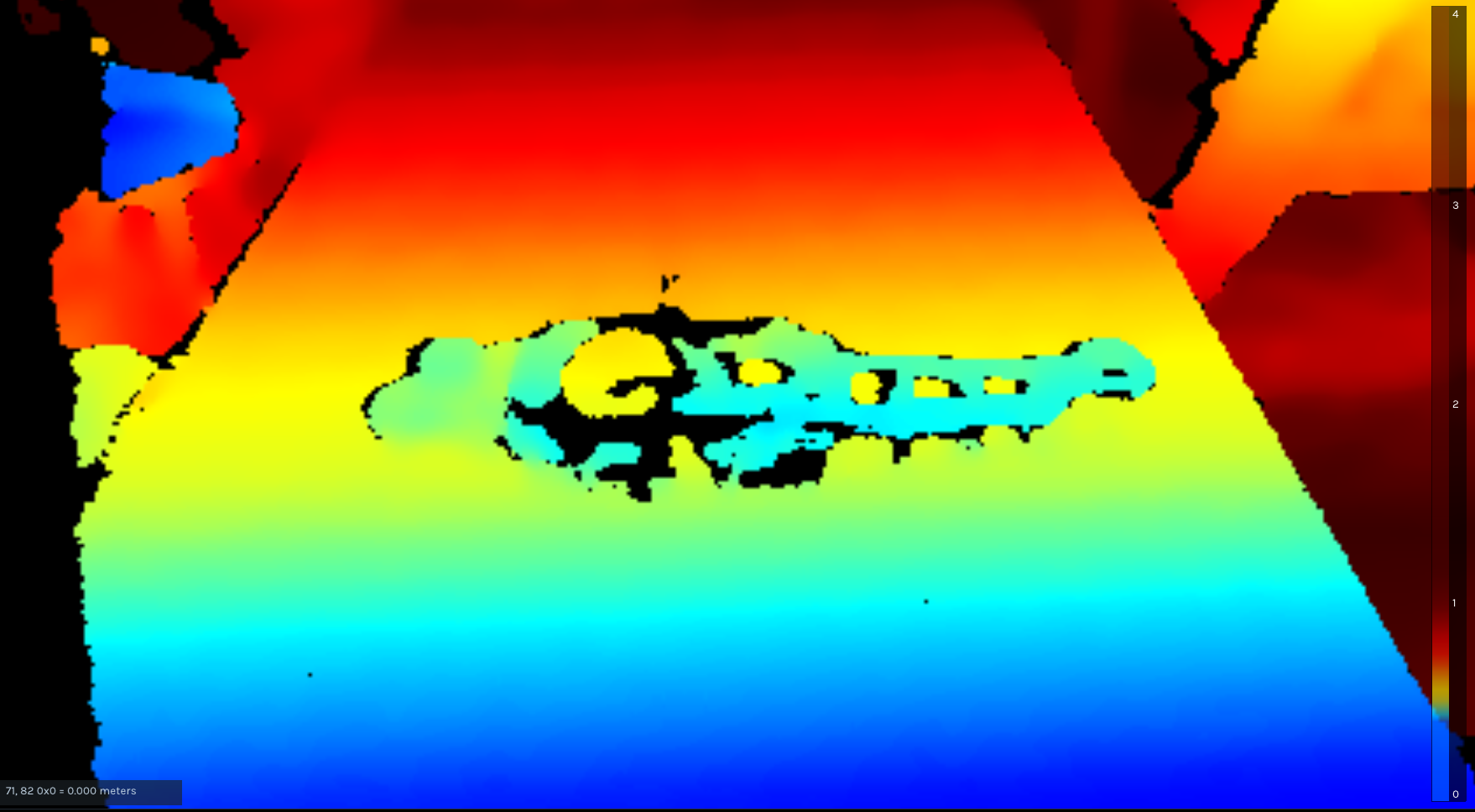 |
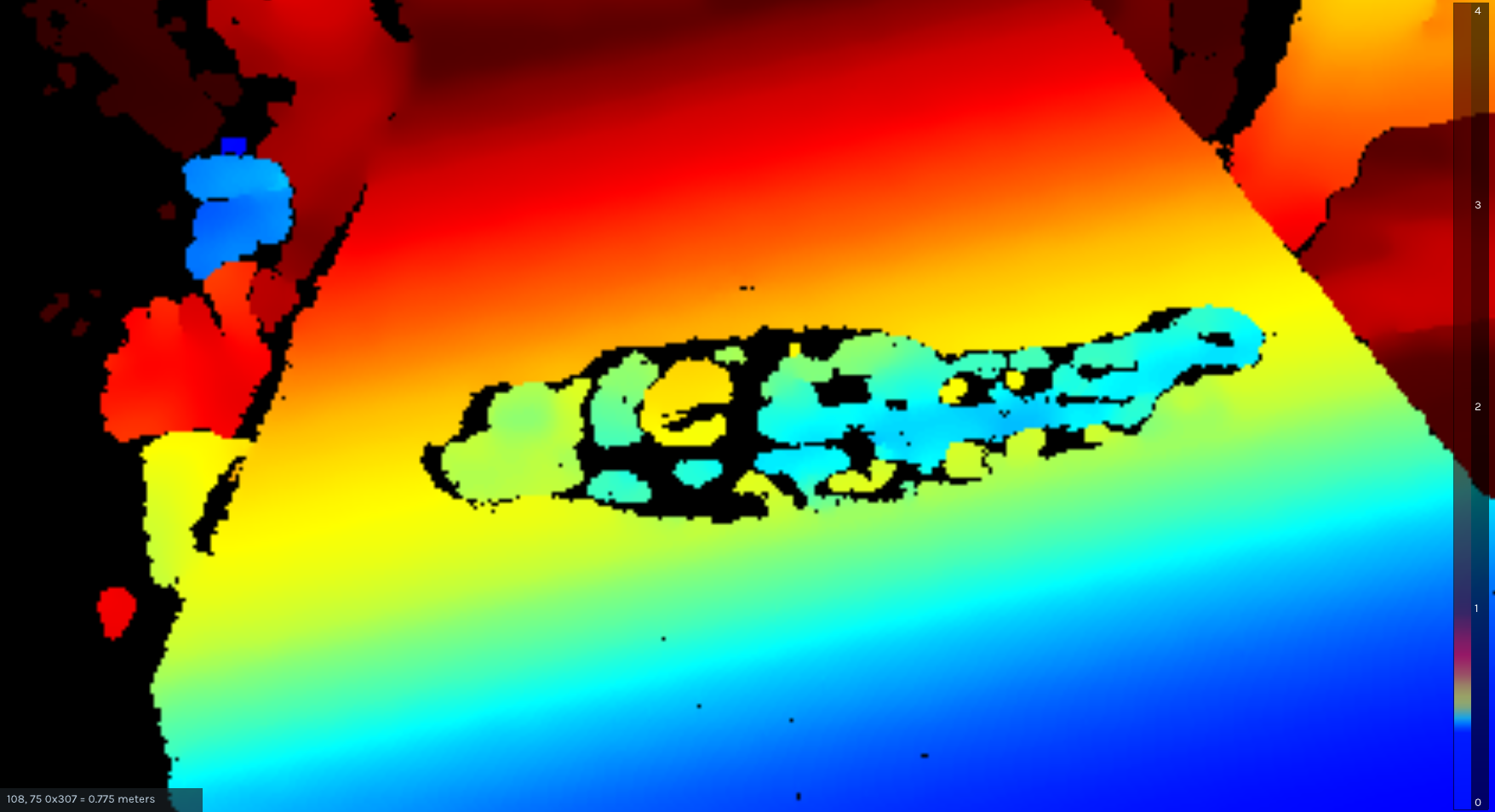 |
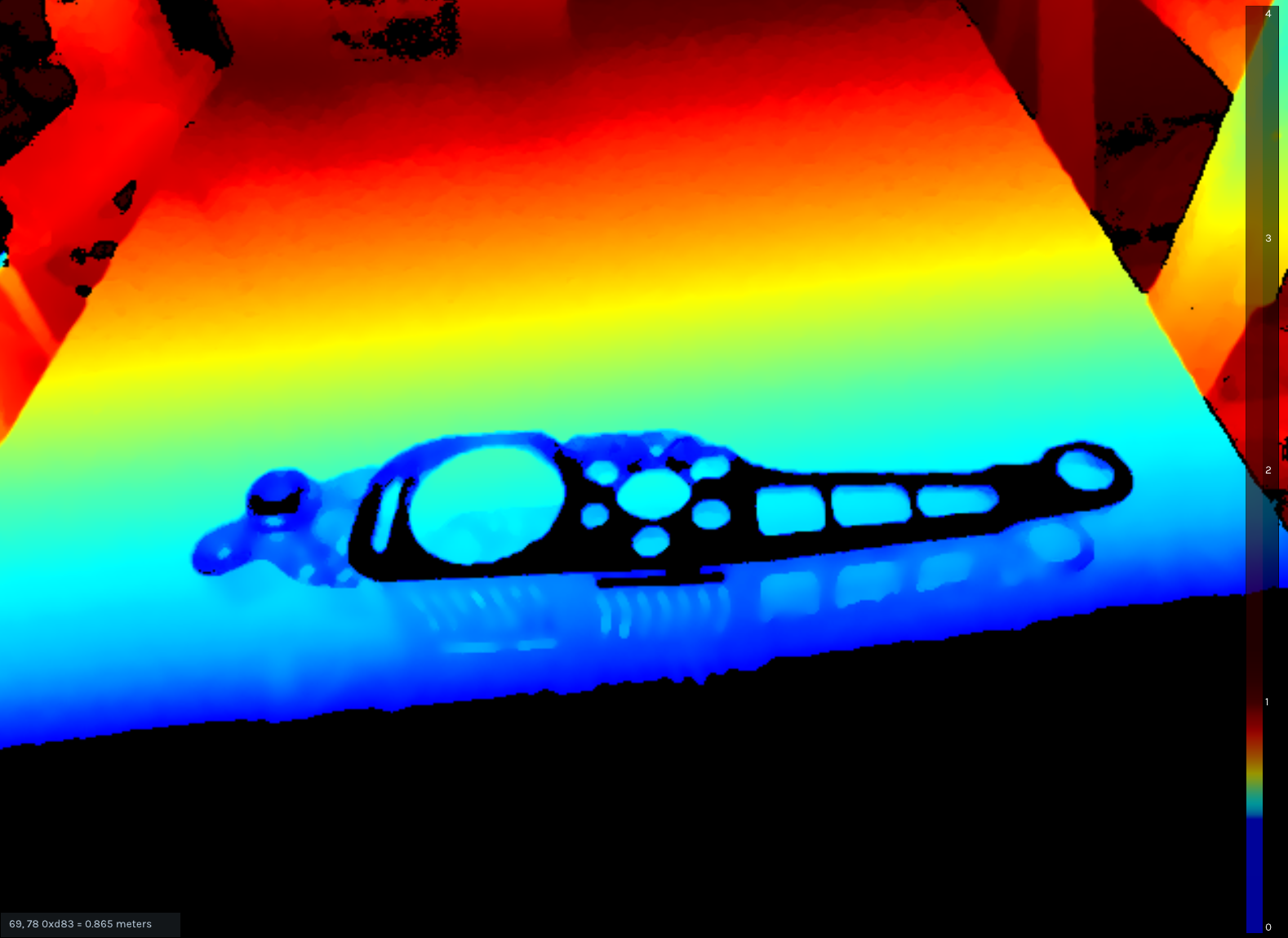 |
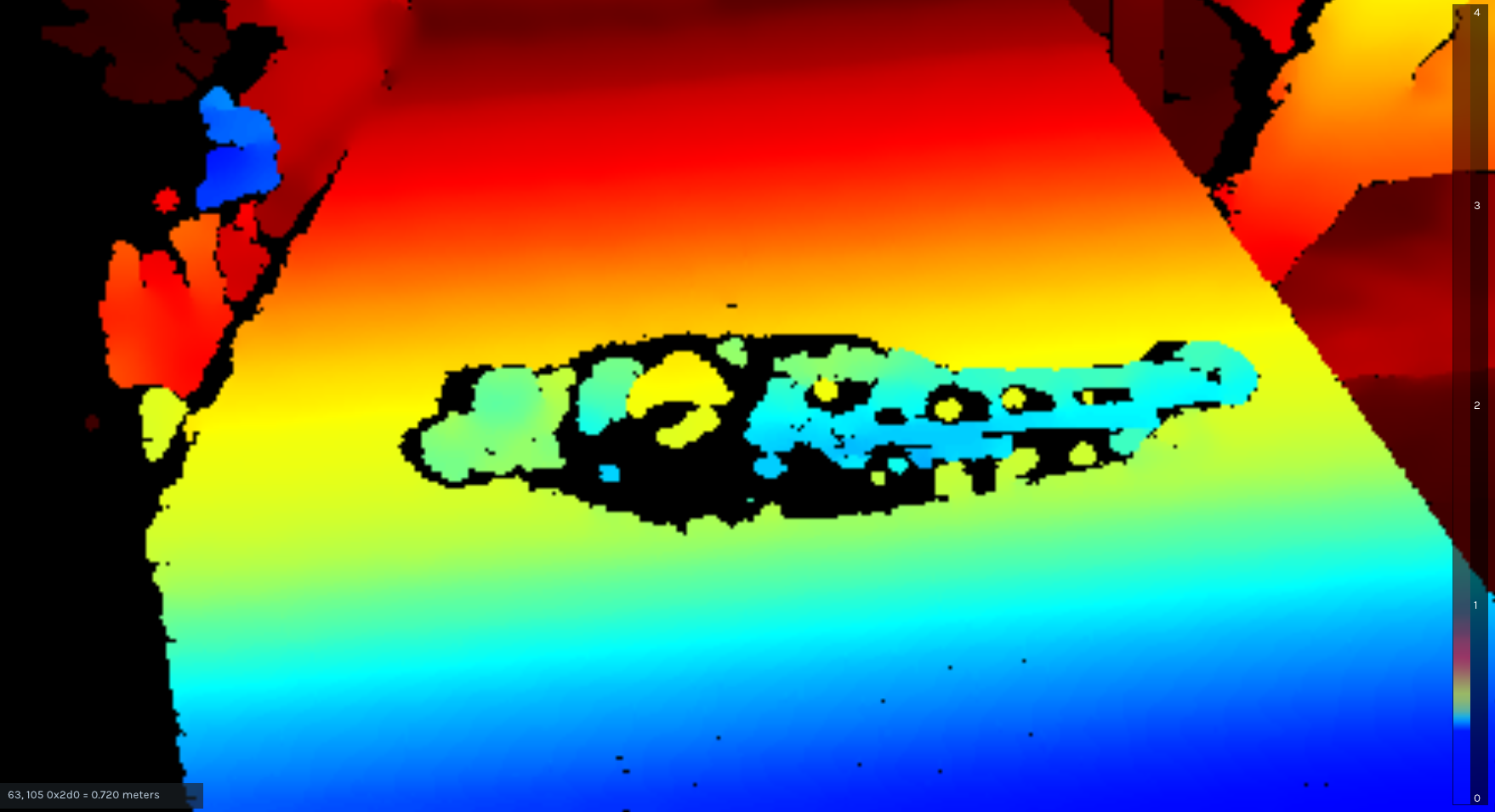 |
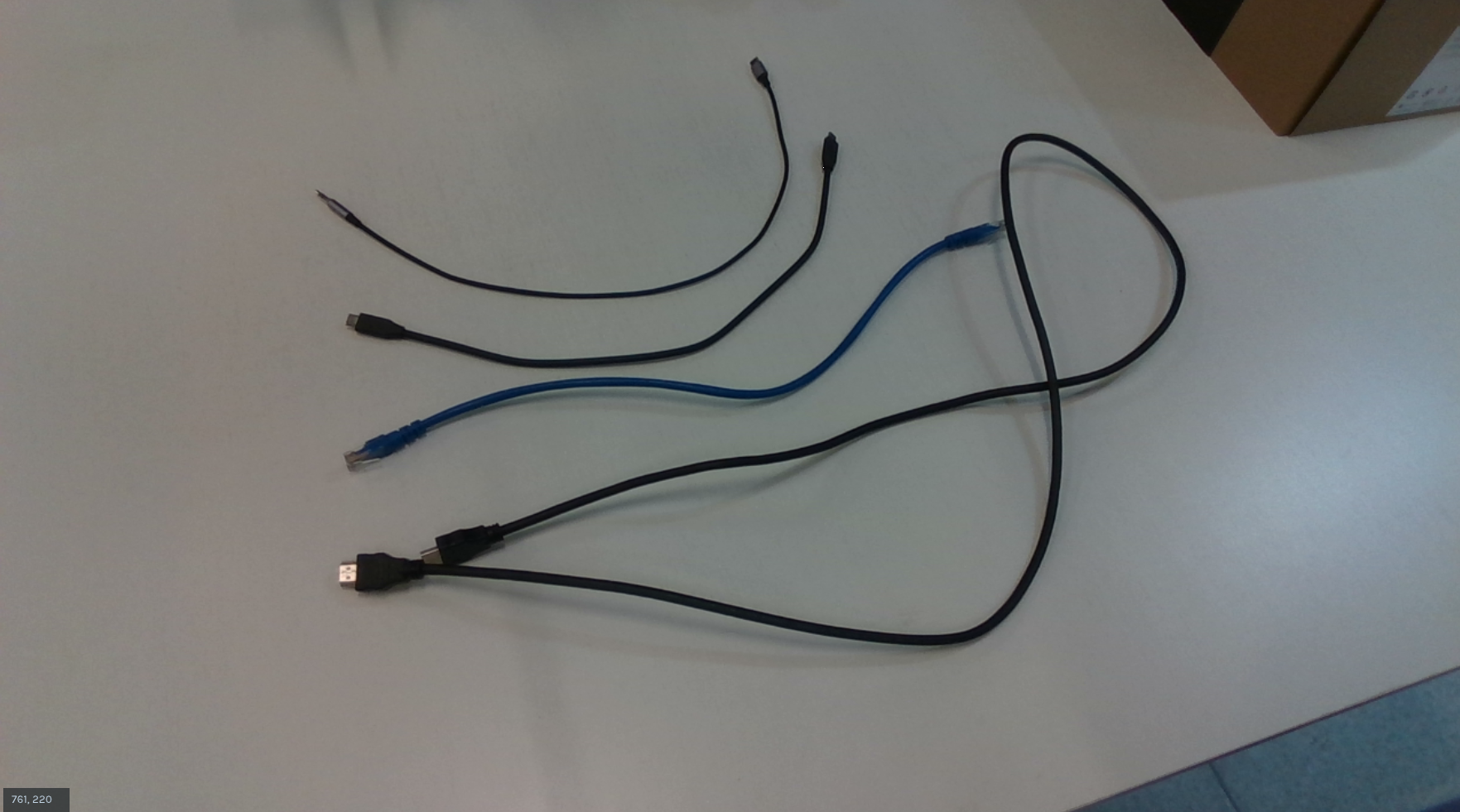
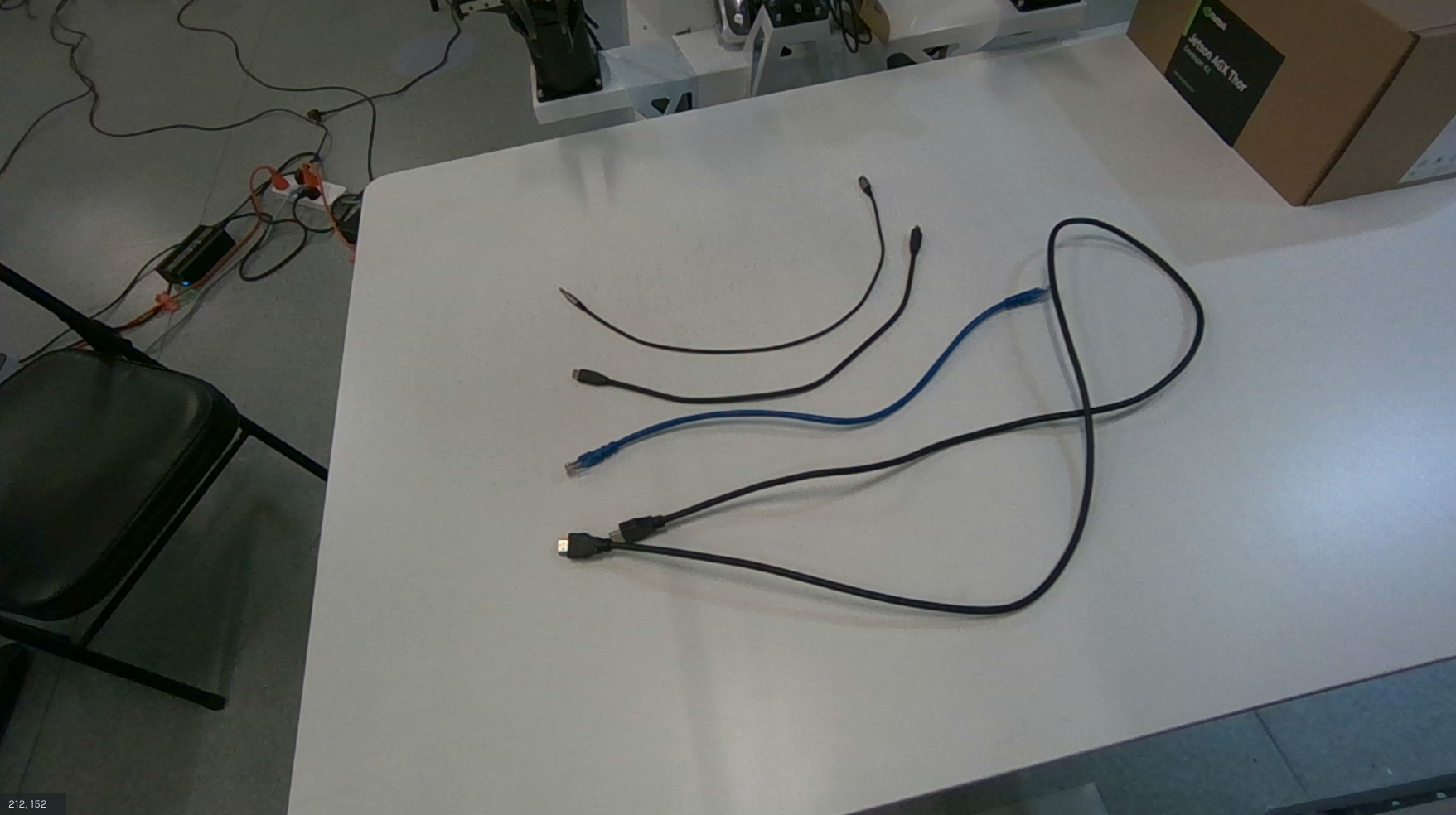
3.3.5 细窄线缆
- RGB - Action 5 Pro
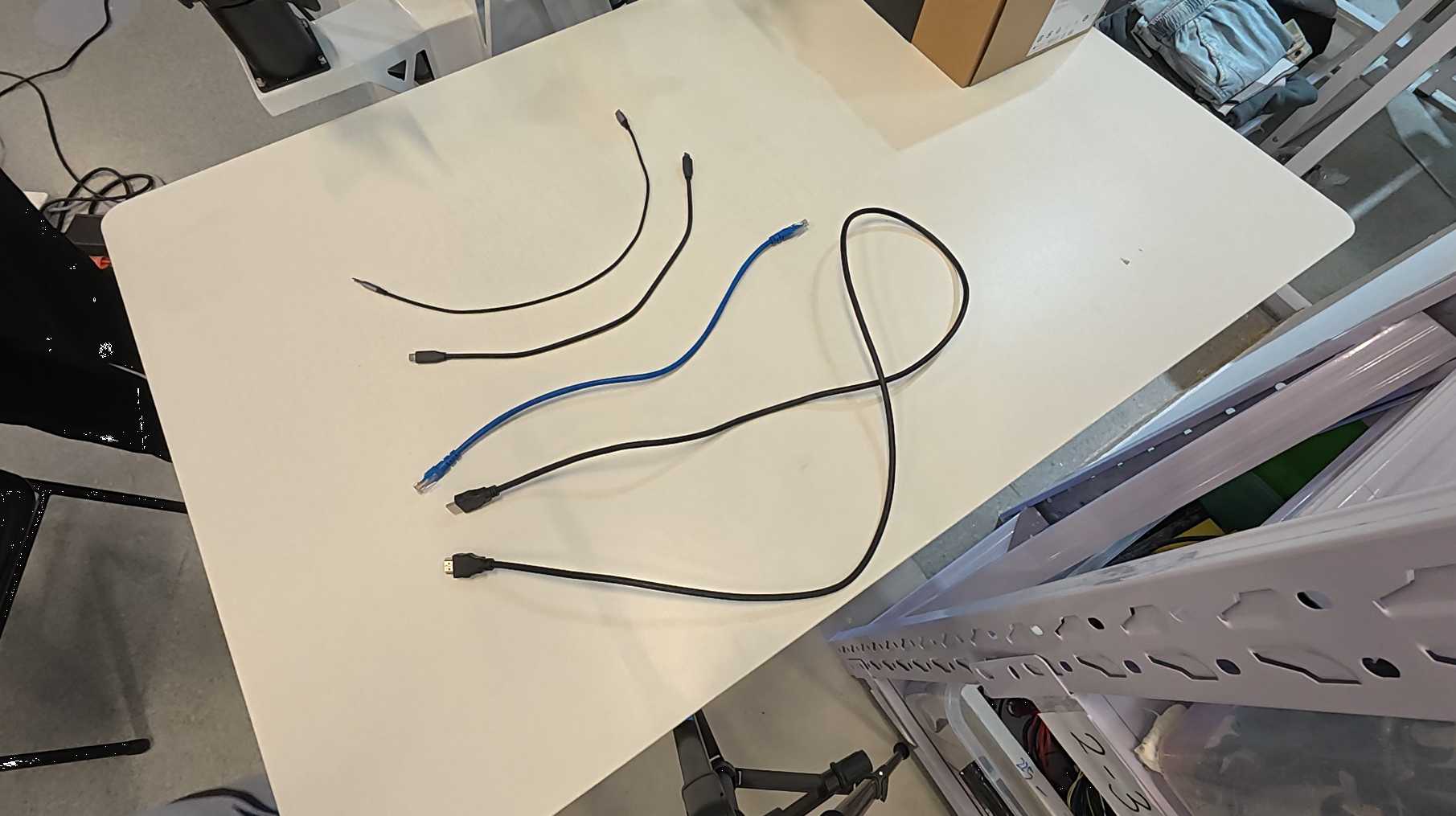
- RGB
| D435i | D456 | L515 | D555 |
|---|---|---|---|
 |
 |
 |
 |
- Depth
| D435i | D456 | L515 | D555 |
|---|---|---|---|
 |
 |
 |
 |
3.3.6 玻璃表面
- RGB - Action 5 Pro

- RGB
| D435i | D456 | L515 | D555 |
|---|---|---|---|
 |
 |
 |
 |
- Depth
| D435i | D456 | L515 | D555 |
|---|---|---|---|
 |
 |
 |
 |
整理中,预计09月10日 3.4 动态物体
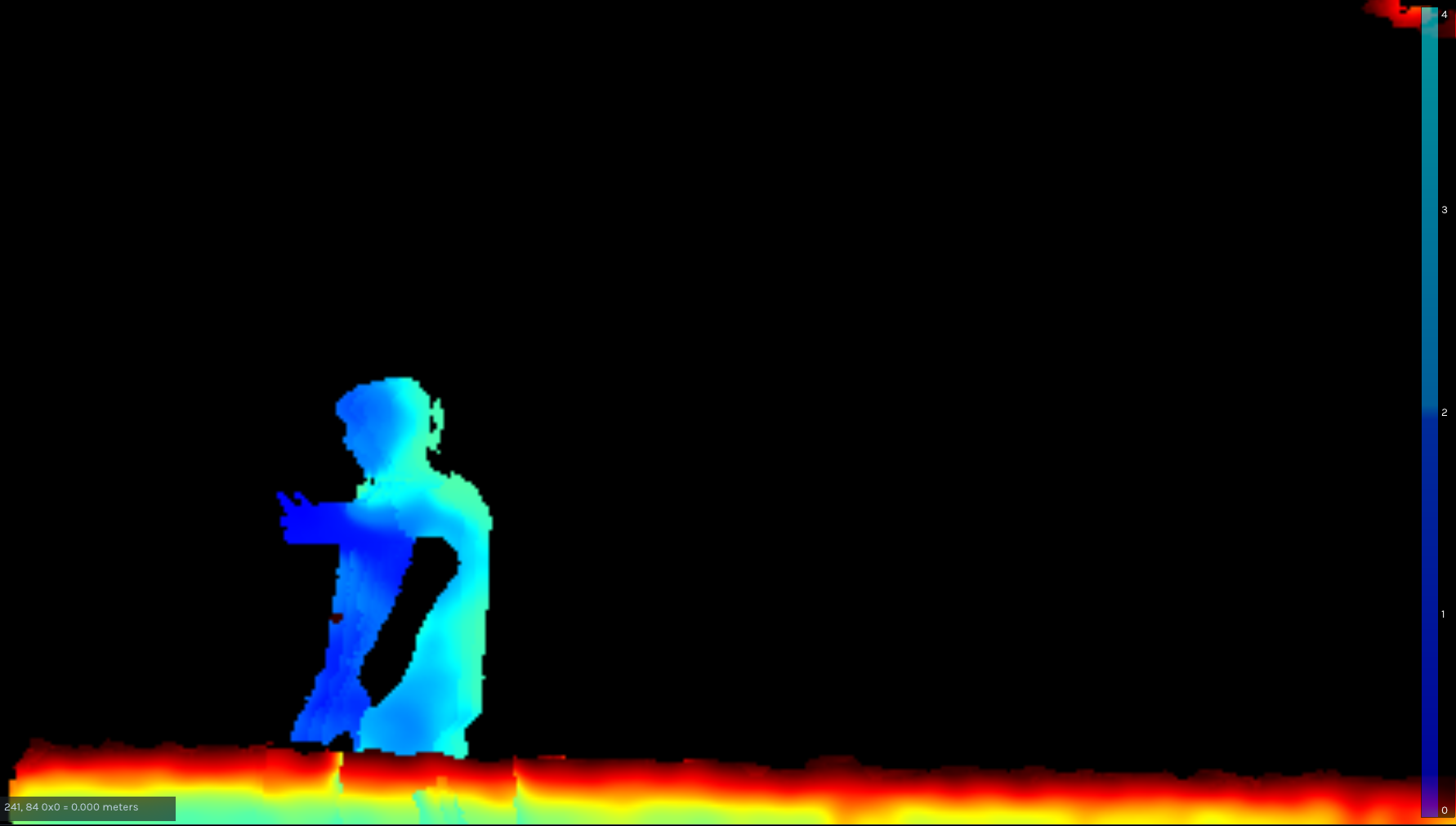
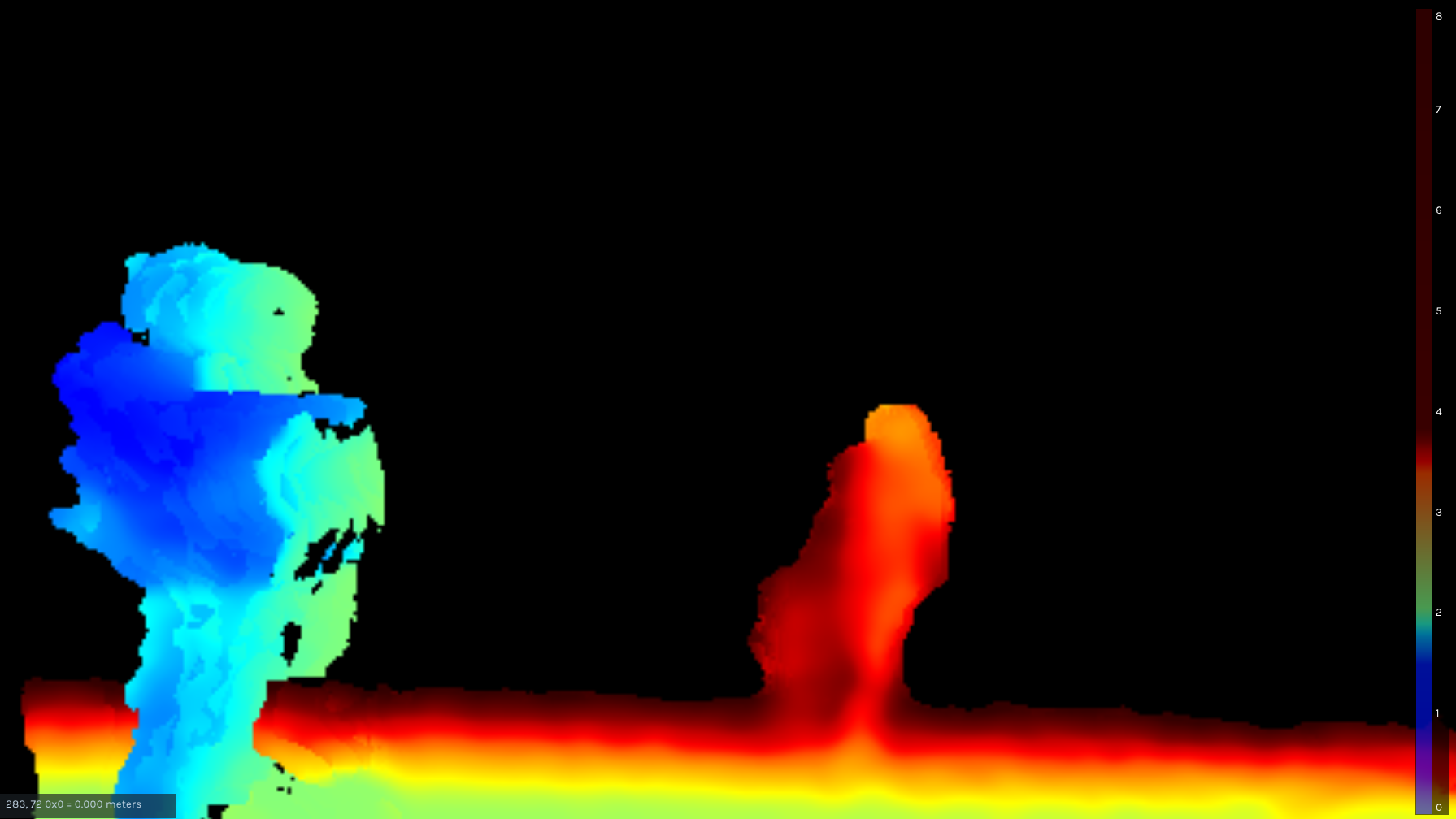
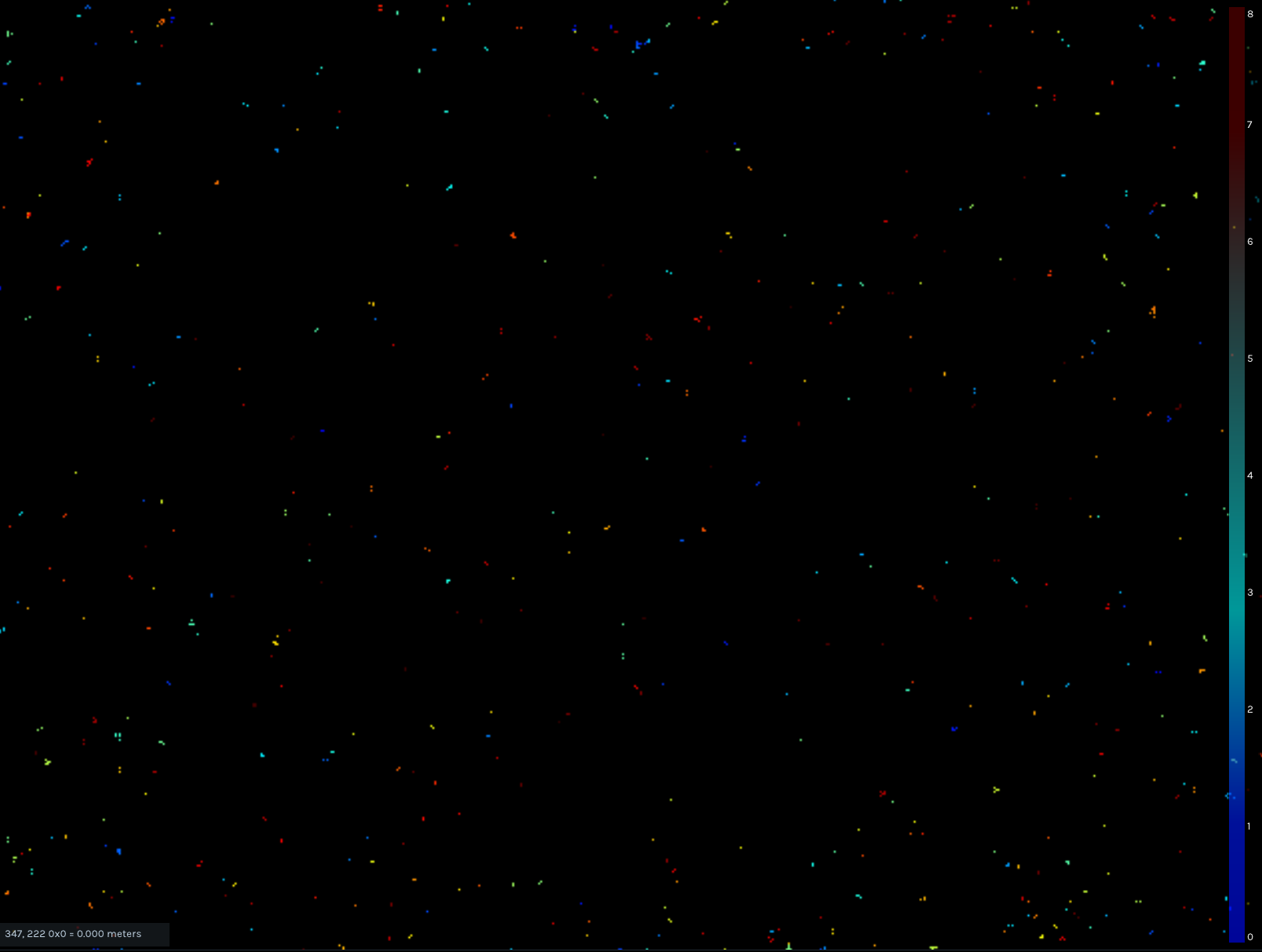
3.4.1 低速单人
- RGB - Action 5 Pro
| D435i | D456 | L515 | D555 |
|---|---|---|---|
- Depth
| D435i | D456 | L515 | D555 |
|---|---|---|---|
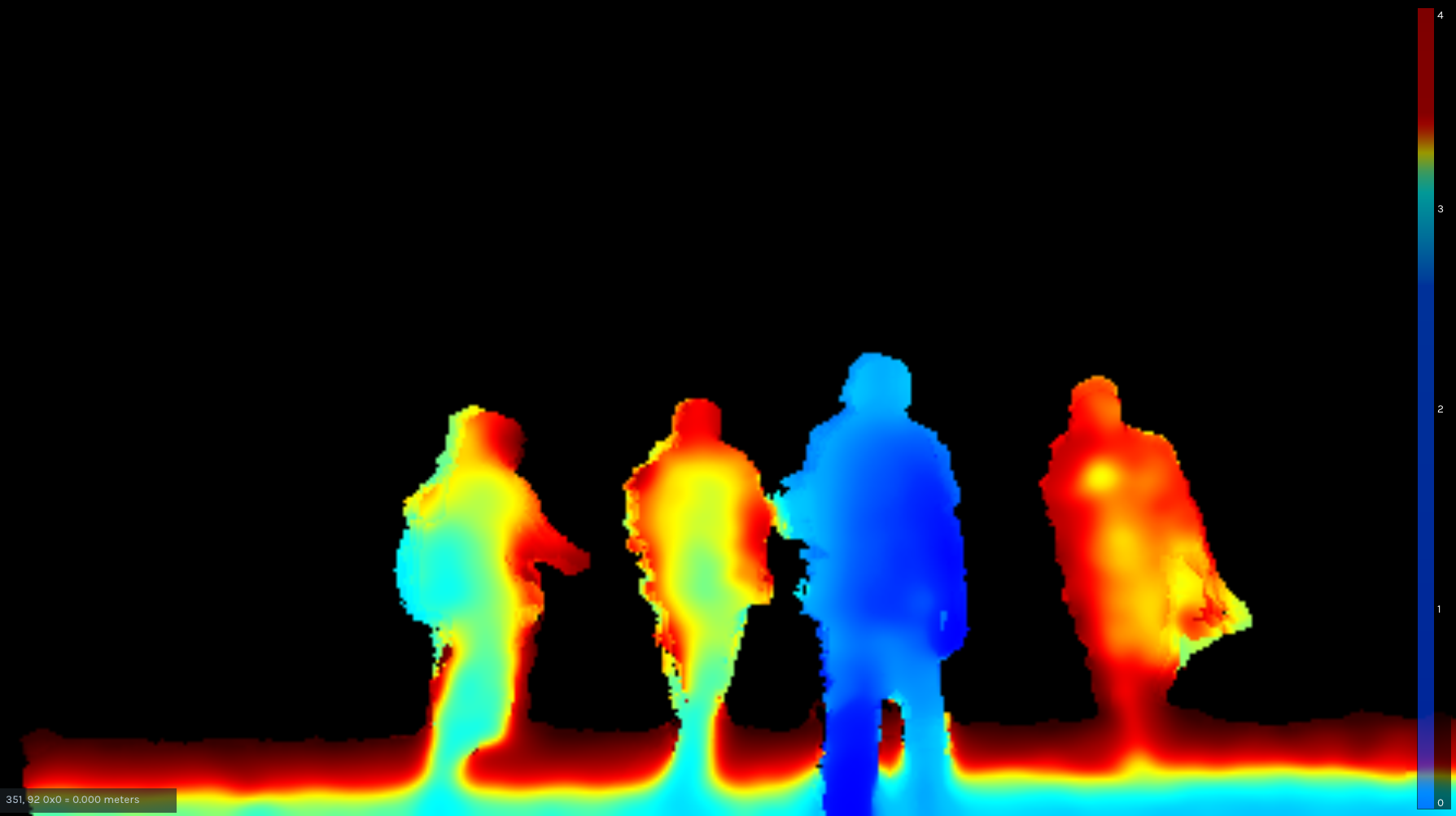
3.4.2 低速人群 - 白天
- RGB - Action 5 Pro

- RGB
| D435i | D456 | L515 | D555 |
|---|---|---|---|
 |
 |
 |
 |
- Depth
| D435i | D456 | L515 | D555 |
|---|---|---|---|
 |
 |
 |
 |
3.4.3 街道车辆 - 白天
- RGB - Action 5 Pro

- RGB
| D435i | D456 | L515 | D555 |
|---|---|---|---|
 |
 |
 |
 |
- Depth
| D435i | D456 | L515 | D555 |
|---|---|---|---|
 |
 |
 |
 |
3.4.4 街道车辆 - 夜间
- RGB - Action 5 Pro

- RGB
| D435i | D456 | L515 | D555 |
|---|---|---|---|
 |
 |
 |
 |
- Depth
| D435i | D456 | L515 | D555 |
|---|---|---|---|
 |
 |
 |
 |