C# 基于halcon的视觉工作流-章34-环状测量
本章目标:
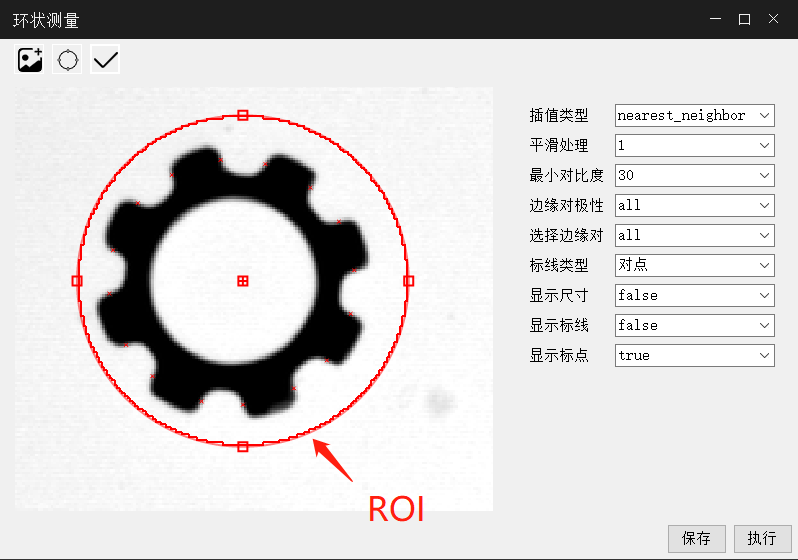
一、圆形ROI提取待测量的圆形图像;
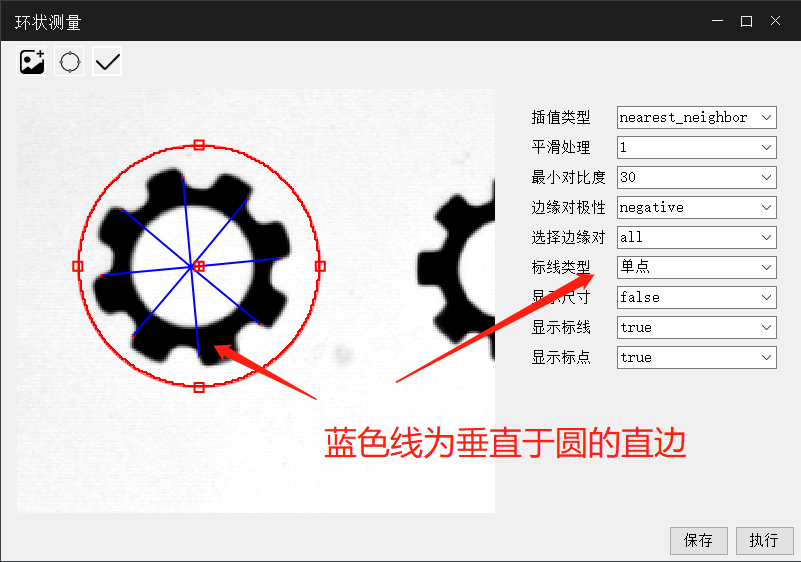
二、gen_measure_arc 准备提取垂直于圆弧的直边;
三、measure_pos 提取垂直于矩形或环形弧的直线边缘;
四、measure_pairs提取垂直于矩形或环形弧长轴的直边对;
五、匹配批量计算;
一、用圆形ROI提取待测量的圆形图像
该部分为截图图像中待测量的局部图像,自动计算齿长中心圆,用到多种基础算子,由于基础算子在前些章中已提及,本章不一 一列出,仅描述实现思路。
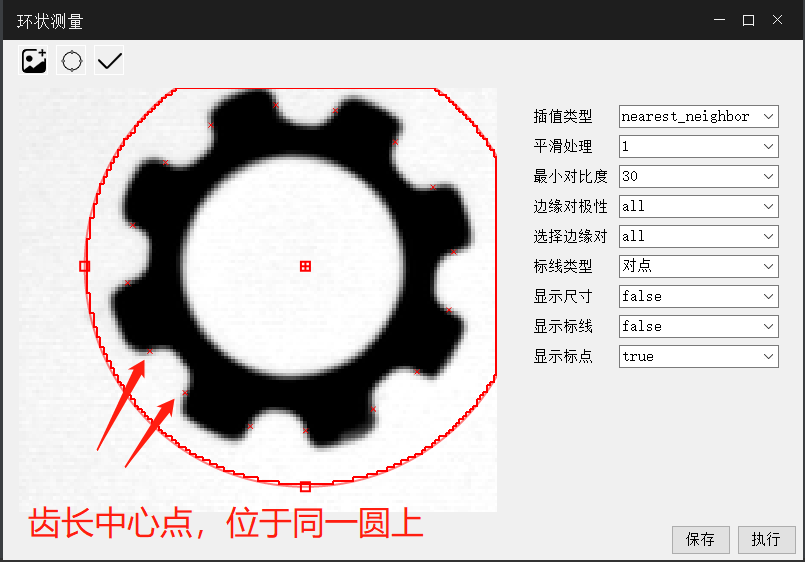
1创建圆形ROI,抠取齿轮局部图像;
2取齿轮最大外接圆、最小内接圆,计算齿长的中心点的圆;
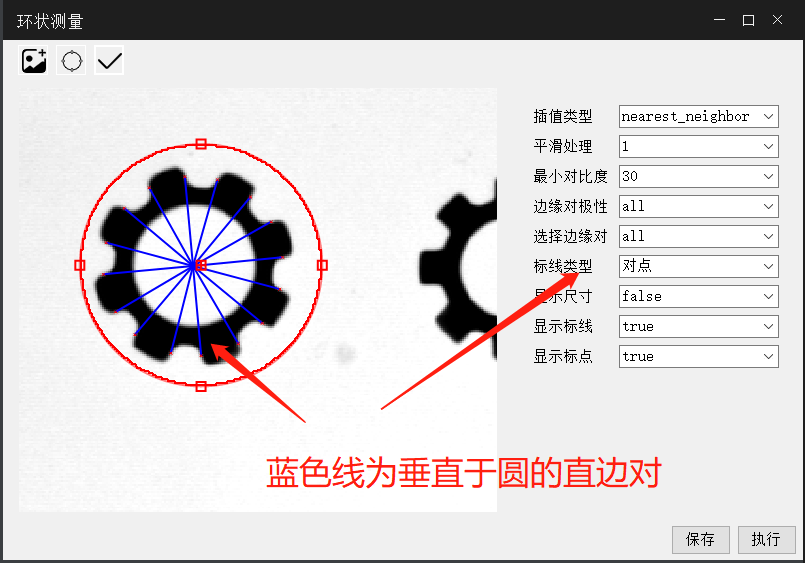
二、gen_measure_arc 准备提取垂直于圆弧的直边
算子主要是根据ROI参数输出测量句柄,为后续提取作准备
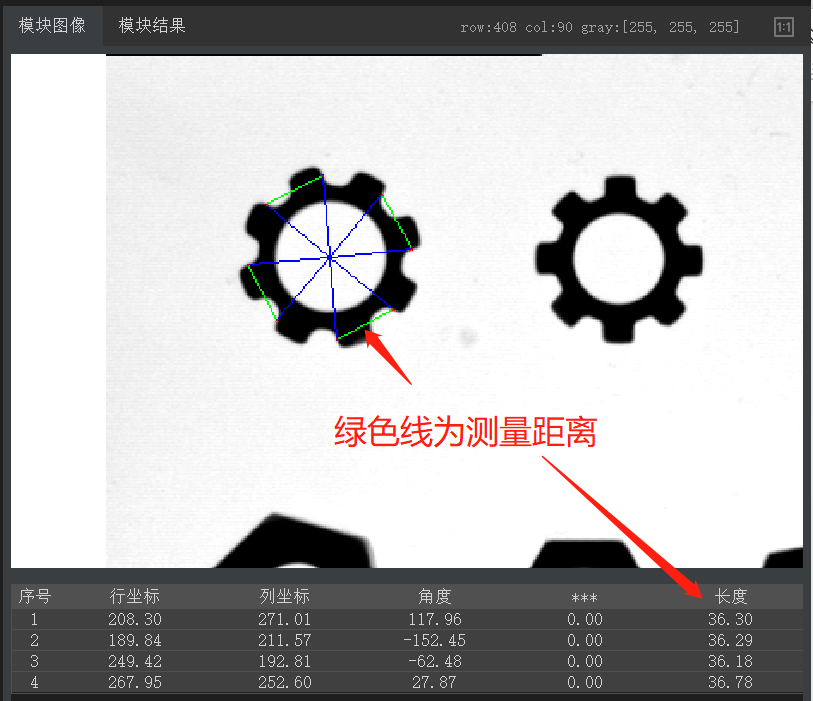
三、measure_pos 提取垂直于矩形或环形弧的直线边缘
直边与直边对的区别,如画一根线,线放大后可直观看到线的宽度,提取线的某一侧边为单边直线,提取线的双侧边为直边对。
四、measure_pairs提取垂直于矩形或环形弧长轴的直边对
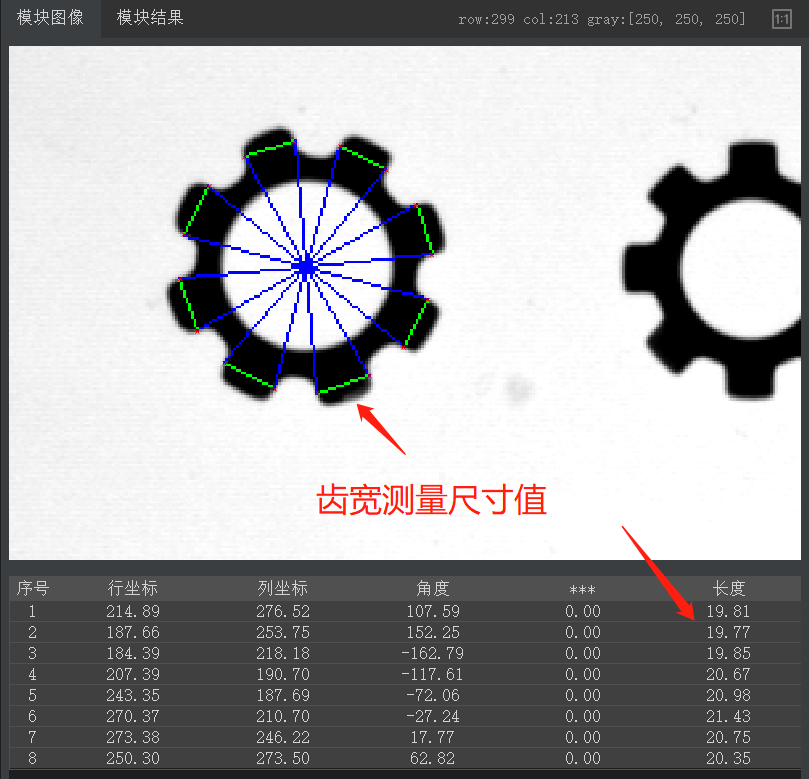
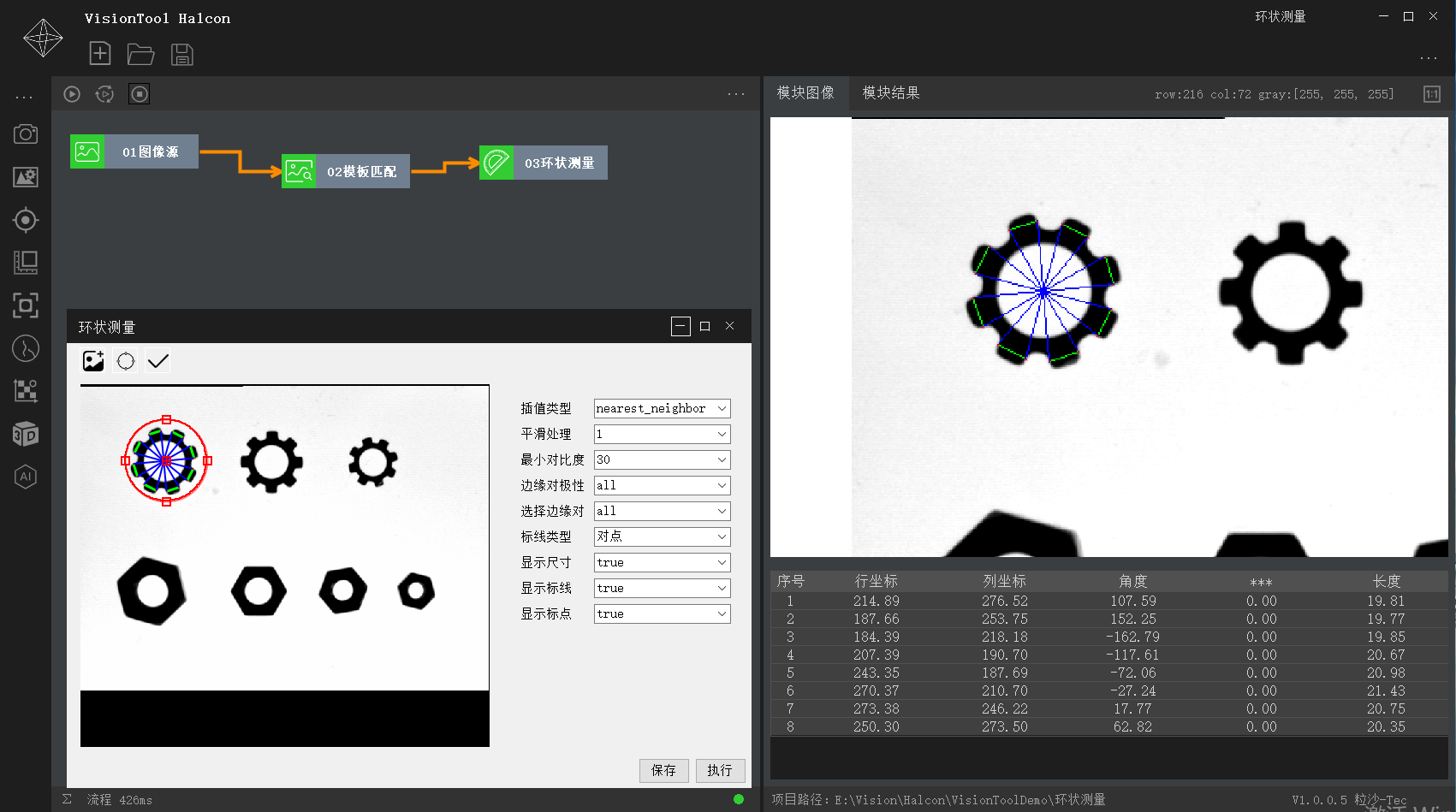
五、匹配批量计算
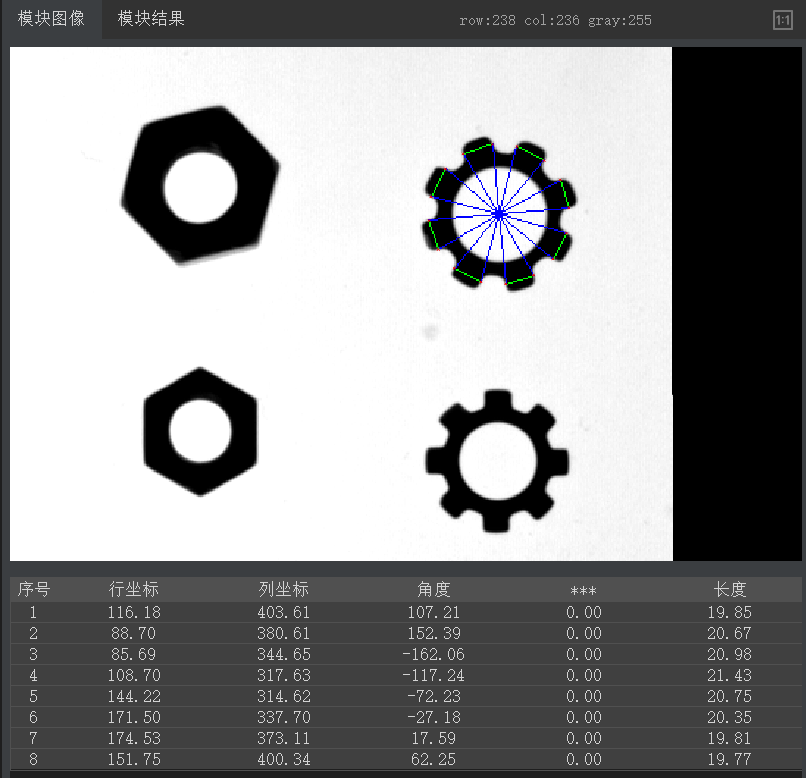
利用模板匹配,以匹配点找到圆形ROI的检测区域,再找进行测量计算
效果如下图,不论方向、角度如何,都能自动计算出齿轮的齿宽尺寸
上述内容需要一定的技术功底,本章至此已结束,欢迎阅读下章,谢谢!