1. 引言:为何需要无人机智能检测?
随着无人机技术的飞速发展和普及,其应用场景从航拍、农业扩展到物流、安防乃至军事领域。然而,无人机的"黑飞"、隐私侵犯、关键区域入侵等问题也日益凸显。传统的雷达、无线电侦测等方法成本高昂且对微型无人机效果不佳。
【图像算法 - 27】基于YOLOv12与OpenCV的无人机智能检测系统
2. 技术选型:YOLO12 + OpenCV 的黄金组合
- YOLO12 (You Only Look Once v12):
- 实时性王者: YOLO系列以其卓越的实时检测性能著称。YOLO12作为其最新迭代版本,在保持高速推理的同时,进一步提升了检测精度和小目标识别能力,非常适合流水线上的高速分拣场景。
- 高精度检测: 采用更先进的网络架构和训练策略,能够精准定位无人机及其缺陷区域,即使在复杂背景或轻微遮挡下也能保持稳定表现。
- 端到端训练: 简化了模型开发流程,从原始图像直接输出检测框和类别,易于集成与部署。
- OpenCV (Open Source Computer Vision Library):
- 图像预处理专家: 负责图像的读取、缩放、色彩空间转换(如BGR转RGB)、去噪、增强等,为YOLO12提供高质量的输入。
- 结果可视化大师: 将YOLO12输出的检测框、类别标签和置信度,以直观的彩色矩形框和文字形式叠加回原图,便于结果展示与分析。
3. 数据准备:构建高质量的无人机识别数据集
"Garbage in, garbage out." 模型的性能很大程度上取决于训练数据的质量。我们构建了一个专门用于无人机识别的数据集。
3.1 数据采集
- 来源: 网络收集资源、实地采集。
- 多样性: 不同品牌、格式、环境、背景。
- 数量: 收集了超过7000张高质量图像,确保无人机样本充足且分布均衡。

3.2 数据标注
-
工具: 使用 LabelImg 、CVAT 或 Roboflow 等开源标注工具。
-
方法: 采用 矩形框 (Bounding Box) 标注。为图像中的每个无人机绘制边界框。
-
类别定义 (示例):
yamlnames: 0: Drone -
格式: 保存为 YOLO 格式 的
.txt文件(每行:class_id center_x center_y width height,坐标已归一化)。
3.3 数据集划分
-
按 7:2:1 的比例划分为 训练集 (train) 、验证集 (val) 和 测试集 (test)。
-
创建数据配置文件 Drone.yaml
yaml# Drone.yaml path: /path/to/apple/dataset train: images/train val: images/val test: images/test names: 0: Drone
4. 模型训练:用YOLO12"学习"识别无人机
利用Ultralytics YOLO12的API,训练过程变得异常简单。
4.1 环境准备
bash
# 安装Ultralytics (支持YOLO12)
pip install ultralytics>=8.2.0 # 假设YOLO12在此版本或之后支持
# 安装OpenCV (用于后续推理)
pip install opencv-python4.2 开始训练
使用命令行启动训练:
bash
yolo train \
model=yolo12n.pt \ # 选择YOLO12n模型 (平衡精度与速度)
data=Drone.yaml \ # 指向数据配置文件
epochs=100 \ # 训练轮数
imgsz=640 \ # 输入图像尺寸
batch=16 \ # 批次大小 (根据GPU显存调整)
device=0 \ # 使用GPU 0 (若有多卡可设为 0,1,2,3)
name=xxxx\ # 训练任务名称
patience=15 \ # 早停轮数
lr0=0.01 \ # 初始学习率
optimizer=AdamW \ # 优化器
cos_lr=True # 使用余弦退火学习率- 关键参数:
model: 可选择yolo12n(nano, 超快),yolo12s(small),yolo12m(medium),yolo12l(large),yolo12x(extra large)。根据您的硬件和精度需求选择。data: 必须正确指向您的apple_defects.yaml。epochs,imgsz,batch: 核心训练参数。name: 训练结果将保存在runs/detect/name/目录下。
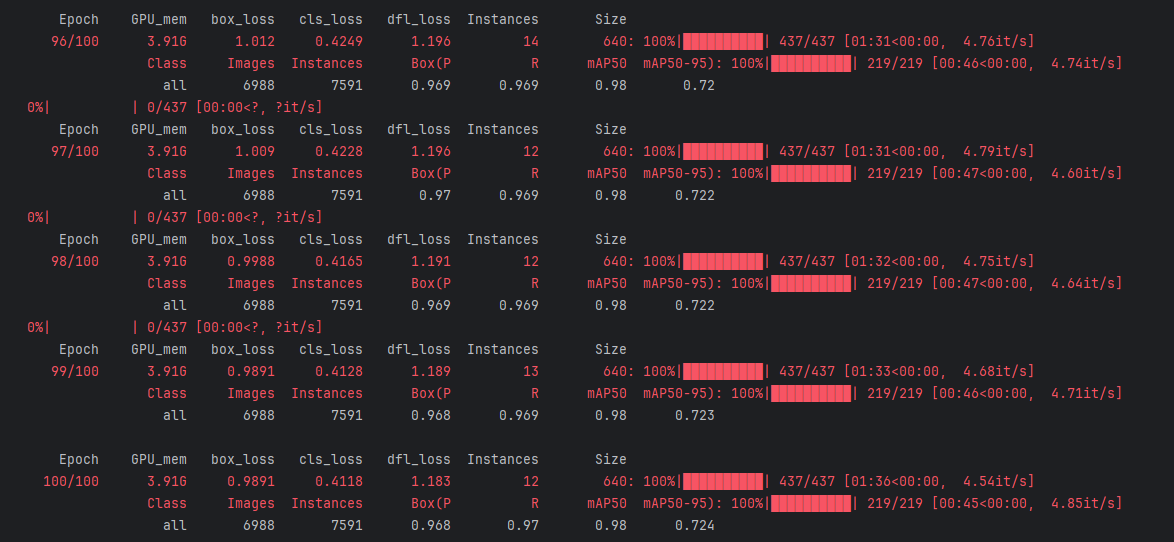

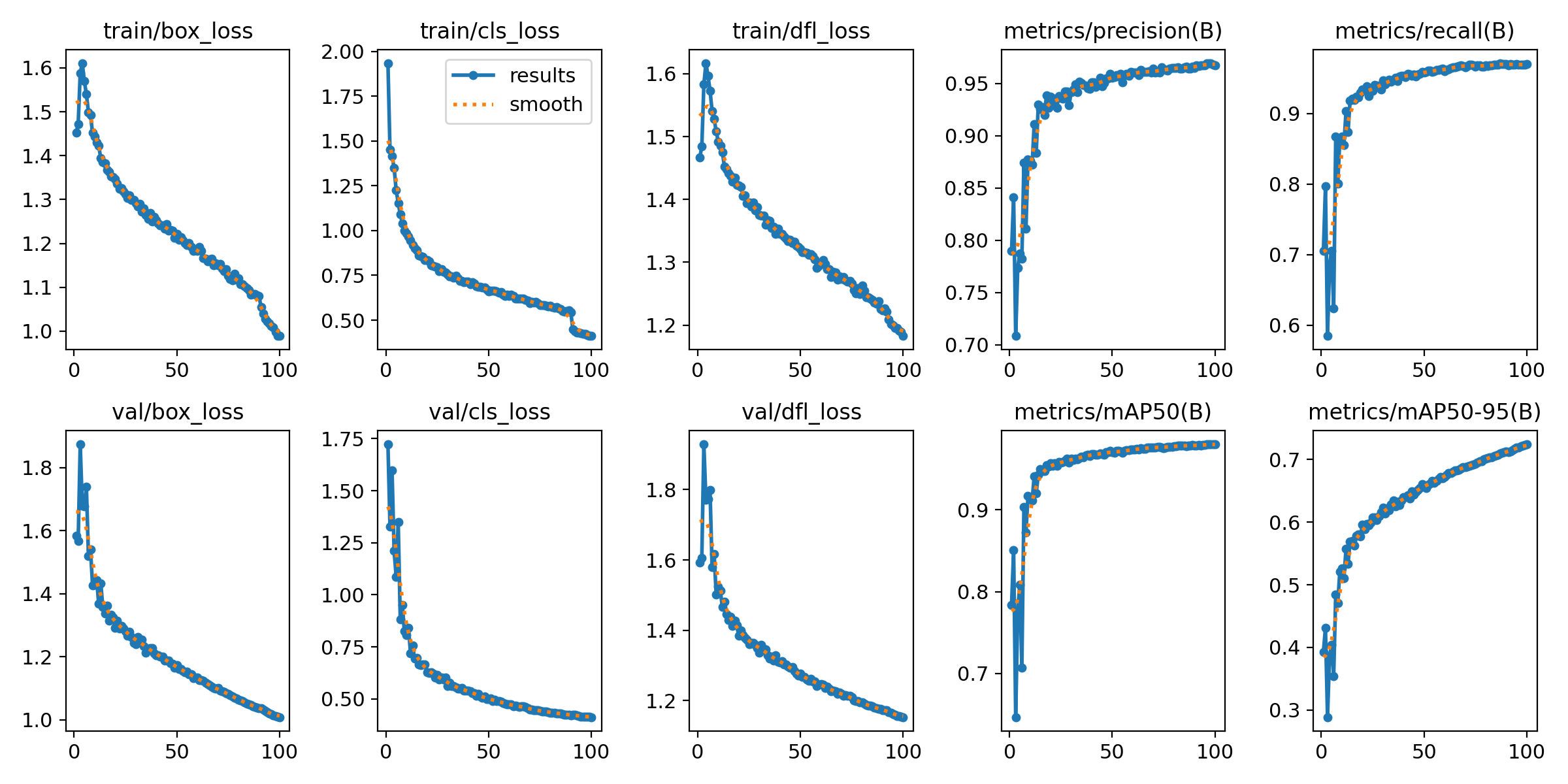
4.3 监控与评估
-
训练过程中,Ultralytics会自动在
bashruns/detect/xxxxx/目录生成:
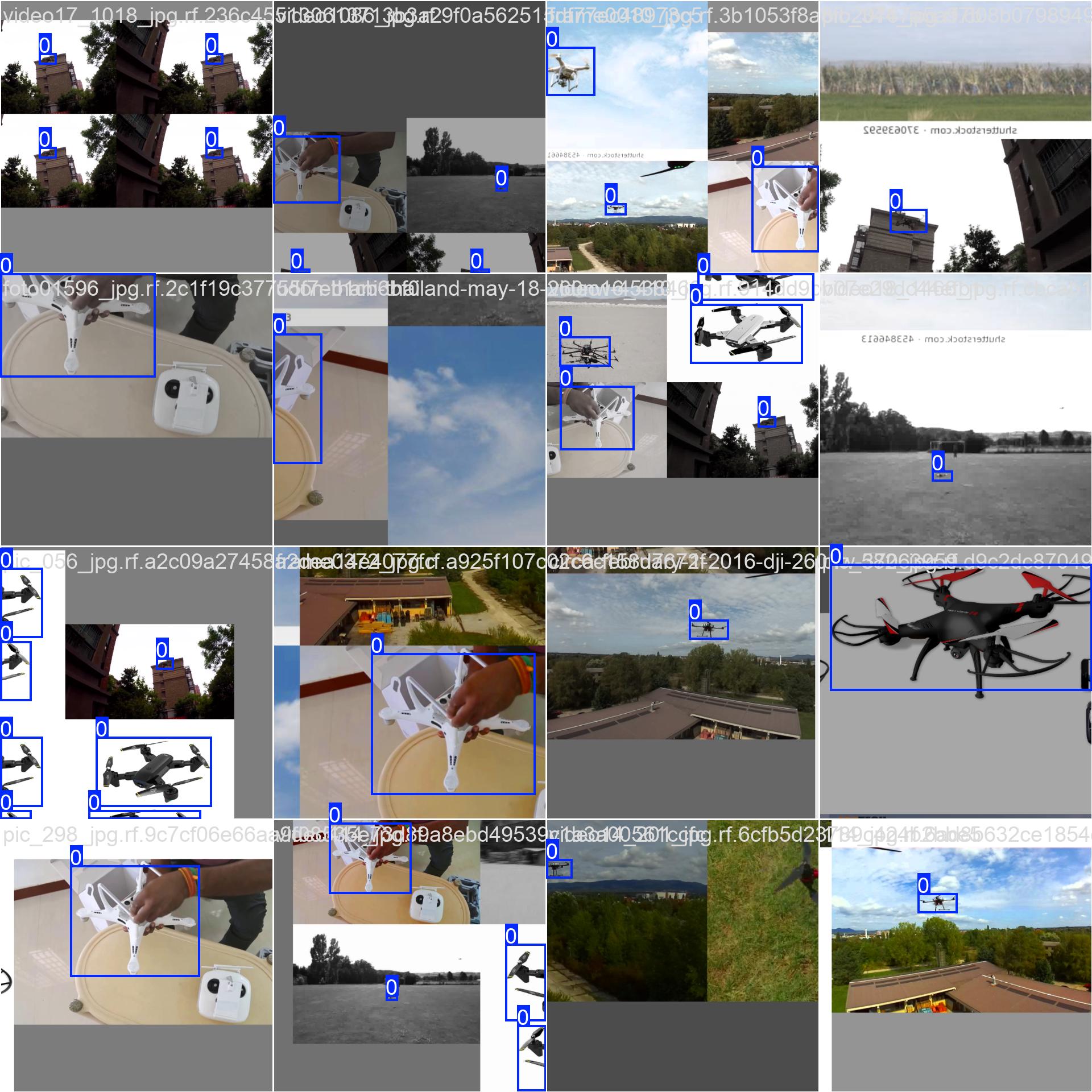
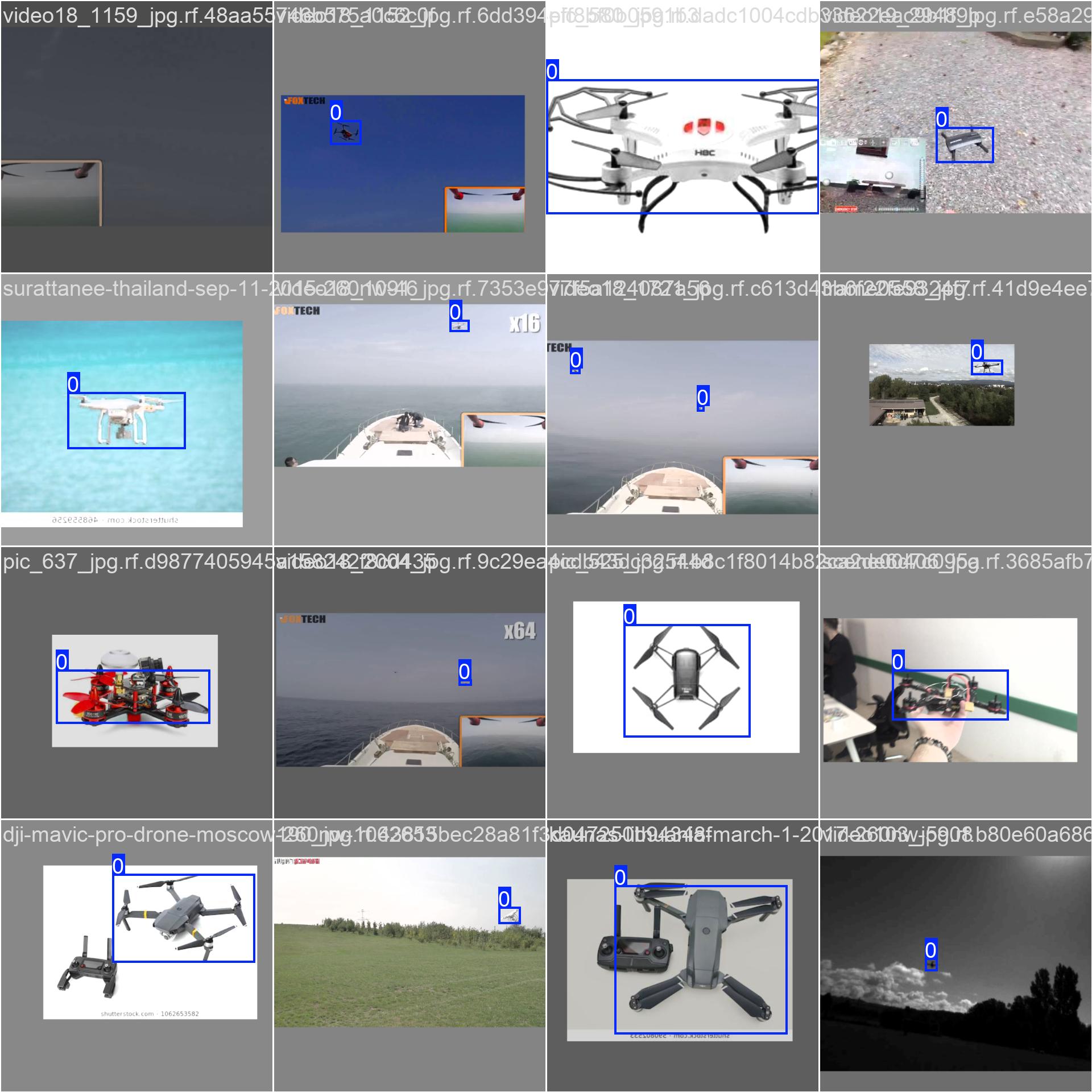
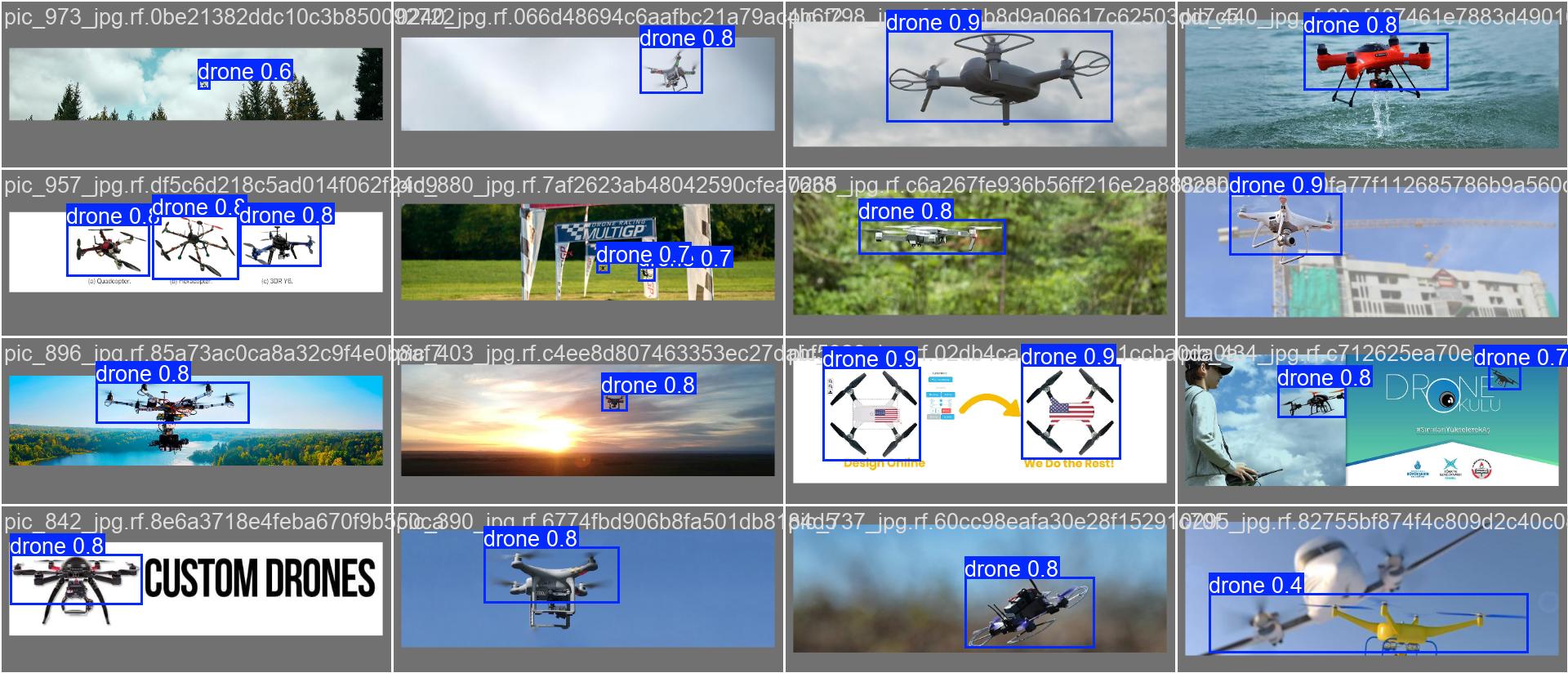
results.png: 展示训练/验证损失、mAP@0.5、mAP@0.5:0.95等指标曲线。confusion_matrix.png: 分析各类别间的混淆情况。val_batch*.jpg: 验证集上的预测效果图。
-
训练结束后,使用测试集评估最终性能:
bashyolo val model=runs/detect/xxxxxx/weights/best.pt data=Drone.yaml -
评估结果将给出在测试集上的 mAP@0.5 和 mAP@0.5:0.95 等关键指标,反映模型的综合性能。
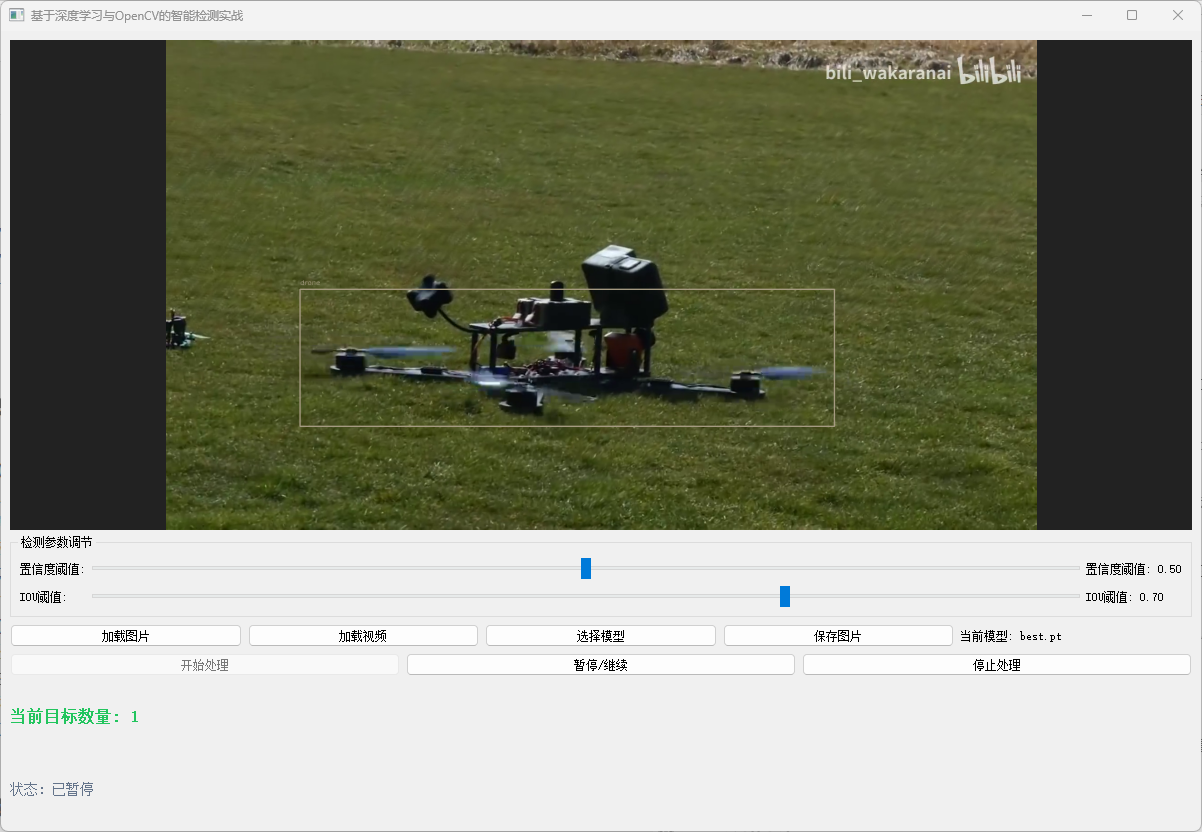
5. 推理与可视化:OpenCV展现AI慧眼
训练好的模型 (best.pt) 可用于实际检测。以下是核心代码:
python
import cv2
import numpy as np
from ultralytics import YOLO
# --- 1. 加载训练好的YOLO12模型 ---
MODEL_PATH = 'runs/detect/xxx/weights/best.pt' # 替换为您的模型路径
model = YOLO(MODEL_PATH)
# --- 2. 加载待检测的无人机图像 ---
IMAGE_PATH = 'drone.jpg' # 替换为您的测试图像路径
image = cv2.imread(IMAGE_PATH)
if image is None:
raise FileNotFoundError(f"无法加载图像: {IMAGE_PATH}")
original_height, original_width = image.shape[:2]
print(f"输入图像尺寸: {original_width}x{original_height}")
# --- 3. 使用YOLO12进行预测 ---
results = model.predict(
source=image,
imgsz=640, # 与训练时一致
conf=0.5, # 置信度阈值
iou=0.45, # NMS IoU阈值
device=0, # 使用GPU
verbose=False
)
# --- 4. 处理并可视化结果 ---
result = results[0]
boxes = result.boxes
names = model.names # 获取类别名称字典
# 为不同类别定义颜色 (BGR格式)
colors = {
'Drone': (0, 255, 0), # 绿色 - 正常
}
# 创建绘制结果的副本
annotated_image = image.copy()
for box in boxes:
# 获取坐标
x1, y1, x2, y2 = map(int, box.xyxy[0].tolist())
# 获取类别和置信度
cls_id = int(box.cls[0])
class_name = names[cls_id]
conf = float(box.conf[0])
# 选择对应颜色
color = colors.get(class_name, (255, 255, 255)) # 默认白色
# 绘制检测框
cv2.rectangle(annotated_image, (x1, y1), (x2, y2), color, 2)
# 准备标签
label = f"{class_name}: {conf:.2f}"
# 获取标签文本尺寸
(text_width, text_height), _ = cv2.getTextSize(label, cv2.FONT_HERSHEY_SIMPLEX, 0.6, 1)
# 绘制标签背景
cv2.rectangle(annotated_image, (x1, y1 - text_height - 10), (x1 + text_width, y1), color, -1)
# 绘制标签文字 (白色)
cv2.putText(annotated_image, label, (x1, y1 - 5), cv2.FONT_HERSHEY_SIMPLEX, 0.6, (255, 255, 255), 1)
# --- 5. 显示与保存结果 ---
cv2.imshow('Drone Defect Detection - YOLO12 + OpenCV', annotated_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 保存结果图像
output_path = 'drone_defect_detection_result.jpg'
cv2.imwrite(output_path, annotated_image)
print(f"检测结果已保存至: {output_path}")6. 代码详解
- 模型加载:
YOLO(MODEL_PATH)加载训练好的权重。 - 预测:
model.predict()执行推理,返回包含边界框、类别、置信度等信息的结果。 - 结果解析: 遍历
boxes,提取xyxy(左上、右下坐标)、cls(类别ID)、conf(置信度)。 - 可视化: 使用
cv2.rectangle绘制不同颜色的框,cv2.putText添加标签。

7. 挑战与解决方案
- 小目标检测难:无人机在远距离时像素占比小。
- 方案:使用更高分辨率输入、采用专门针对小目标优化的模型结构(如引入更精细的特征图)、训练时增加小目标样本。
- 复杂背景干扰:天空中的鸟、云朵、风筝易造成误检。
- 方案:使用在复杂空中场景下训练的专用数据集、调整置信度阈值、引入上下文信息或后处理规则(如根据目标运动轨迹过滤)。
- 光照变化与恶劣天气:强光、逆光、雨雾影响成像。
- 方案:图像预处理(直方图均衡化、去雾算法)、训练数据包含各种天气条件、使用红外或热成像摄像头辅助。
- 实时性要求高:需要高FPS保证及时响应。
- 方案:模型轻量化、硬件加速、降低分辨率、优化代码(如使用多线程)。
8. 展望
- 多模态融合:结合视觉、雷达、声学、无线电频谱数据,构建更鲁棒的无人机探测网络。
- 边缘智能:模型进一步轻量化,直接部署在摄像头或小型无人机上,实现分布式检测。
- 行为识别:不仅检测无人机,还能识别其飞行意图(如悬停、快速接近、徘徊),实现智能预警。
- 对抗样本防御:研究针对视觉检测系统的对抗攻击与防御机制,提升系统安全性。