文章目录
- 前言
- 1.PercipioViewer软件调试相机参数
-
- [1.1 PV软件保存相机参数](#1.1 PV软件保存相机参数)
- [1.2 保存参数注意事项](#1.2 保存参数注意事项)
- [1.3 FS/PM带SGBM参数相机调参说明](#1.3 FS/PM带SGBM参数相机调参说明)
-
- [1.3.1 disparityNum和disparityOffset参数调整技巧](#1.3.1 disparityNum和disparityOffset参数调整技巧)
- [1.3.2 matchWinW和matchWinH参数调整技巧](#1.3.2 matchWinW和matchWinH参数调整技巧)
- [1.3.3 P1和P2参数调整技巧](#1.3.3 P1和P2参数调整技巧)
- [1.3.4 uniqueFator和uniqueAbsDiff参数调整技巧](#1.3.4 uniqueFator和uniqueAbsDiff参数调整技巧)
- [1.4 推荐使用相机](#1.4 推荐使用相机)
- 2.新版PercipioViewer软件
-
- [2.1 软件使用](#2.1 软件使用)
- [3. `4.X.X`版本 Camport ROS2 SDK](#3.
4.X.X版本 Camport ROS2 SDK) -
- [3.1 `4.X.X版本` Camport ROS2 SDK源文件介绍](#3.1
4.X.X版本Camport ROS2 SDK源文件介绍) - [3.2 `4.X.X版本` Camport ROS2 SDK工作流程](#3.2
4.X.X版本Camport ROS2 SDK工作流程) -
- [3.2.1 包含头文件](#3.2.1 包含头文件)
- [3.2 2 初始化 ROS2 节点](#3.2 2 初始化 ROS2 节点)
- [3.2.3 创建节点对象](#3.2.3 创建节点对象)
- [3.2.4 创建发布者对象并实现发布逻辑](#3.2.4 创建发布者对象并实现发布逻辑)
- [3.2.5 启动ROS2](#3.2.5 启动ROS2)
- [3.3 `4.X.X版本` ROS2 SDK环境配置与编译](#3.3
4.X.X版本ROS2 SDK环境配置与编译) -
- [3.3.1 Ubuntu 20.04 下ROS2 Foxy环境配置与编译](#3.3.1 Ubuntu 20.04 下ROS2 Foxy环境配置与编译)
- [3.3.2 Ubuntu 22.04 下ROS2 Humble环境配置与编译](#3.3.2 Ubuntu 22.04 下ROS2 Humble环境配置与编译)
- [3.3.3 编译文件检查](#3.3.3 编译文件检查)
- [3.1 `4.X.X版本` Camport ROS2 SDK源文件介绍](#3.1
- [4.`4.X.X版本` 参数配置](#4.
4.X.X版本参数配置) -
- [4.1 方法一修改相机launch文件](#4.1 方法一修改相机launch文件)
-
- [4.1.1 单相机](#4.1.1 单相机)
- [4.1.2 多相机](#4.1.2 多相机)
- [4.1.3 launch文件参数说明](#4.1.3 launch文件参数说明)
- [4.2 通过看图软件修改参数](#4.2 通过看图软件修改参数)
- [5.`4.X.X版本` Camport ROS2常见问题汇总](#5.
4.X.X版本Camport ROS2常见问题汇总) -
- [5.1 启用时域滤波后,运行python3 depth.py无法立即输出深度图,怎么办?](#5.1 启用时域滤波后,运行python3 depth.py无法立即输出深度图,怎么办?)
- [5.2 相机实际输出的图像格式或分辨率为什么未按照用户预设参数(userset)或存储区(storage)的配置?](#5.2 相机实际输出的图像格式或分辨率为什么未按照用户预设参数(userset)或存储区(storage)的配置?)
- 6.补充资料
前言
官网ROS2 4.X.X版本编译文档链接:
https://doc.percipio.xyz/cam/latest/apiguides/sdk4.0-ros2-compile.html
国内gitee下载SDK链接:
https://gitee.com/percipioxyz/camport_ros2
国外github下载SDK链接:
https://github.com/percipioxyz/camport_ros2
1.PercipioViewer软件调试相机参数
新版本的PercipioViewer2.6.1支持把调试好的参数,保存进相机Storage区,具体操作如下:
1.1 PV软件保存相机参数
1.打开目标相机
2.根据实际情况调整相机属性,以达到最佳效果。
3.在设置完相机参数后,关闭所有相机取流。
4.点击菜单栏 Tools > Parameters,进入 Camera parameters configuration 页面
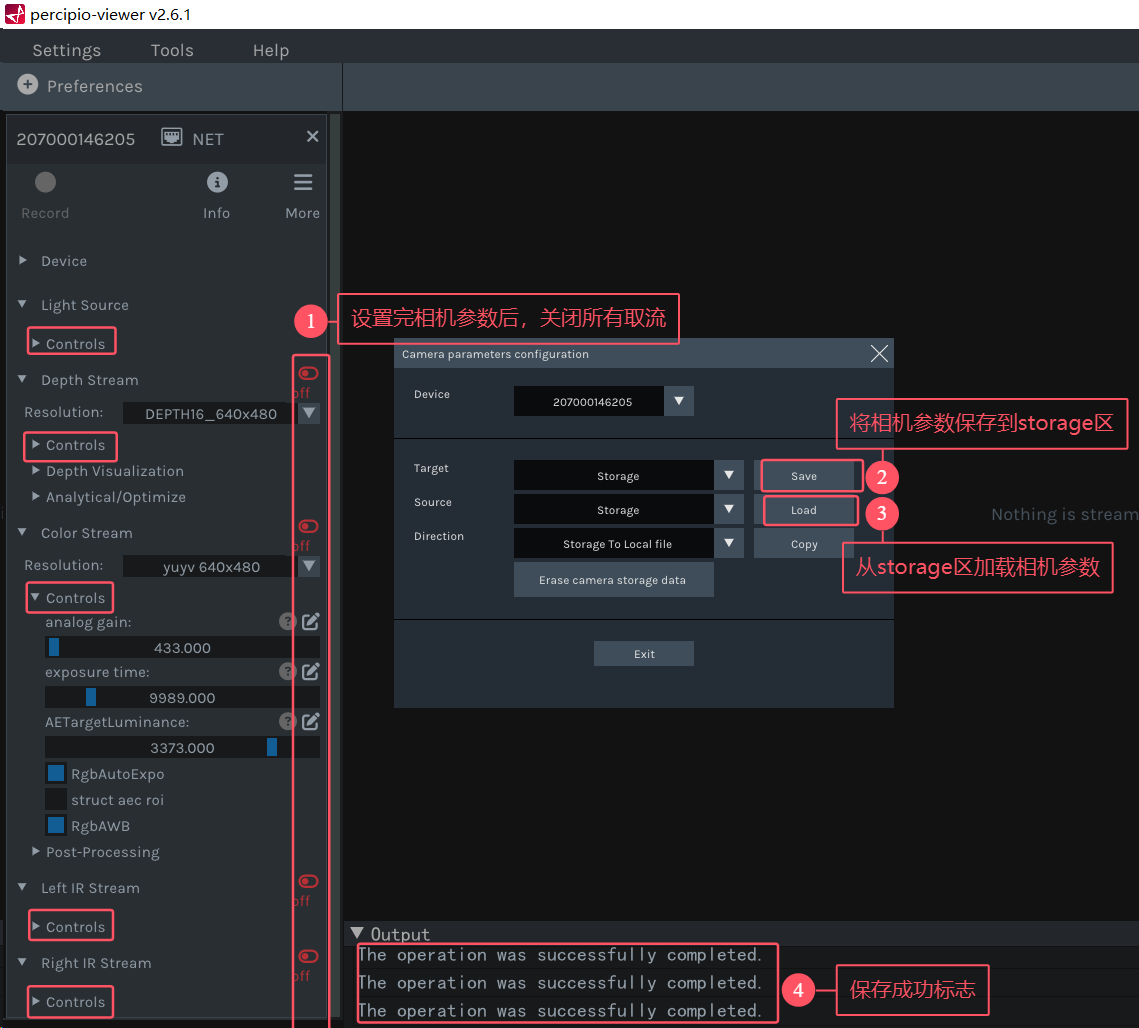
保存参数设置
注1 :此界面只有PercipioViewer 2.6.1以上 版本才有,同时在进行保存参数前,需要关闭相机各个组件取流。
注2:当前保存相机参数至相机storage的方式,只能保存各个组件下的Controls下的属性功能,一些图像后处理方式,暂未保存至相机storage区内。
1.2 保存参数注意事项
1.在打开相机取流的时候,无法进行参数保存,需要关闭相机取流后,再进行保存参数。
2.无法保存相机Device组件里的触发属性,。
3.无法保存深度图和点云图的质量评估及后处理功能。

4.无法保存Color组件的校正畸变,以及AutoISP功能。

5.相机系统层的属性无法保存,如对时设置,接收包比例,图像重传等功能。
1.3 FS/PM带SGBM参数相机调参说明
诸如FM855-E1,FM815-IX-E1,PS800,PS802等带有SGBM参数的相机,需要进行如下操作,才能打开SGBM参数:
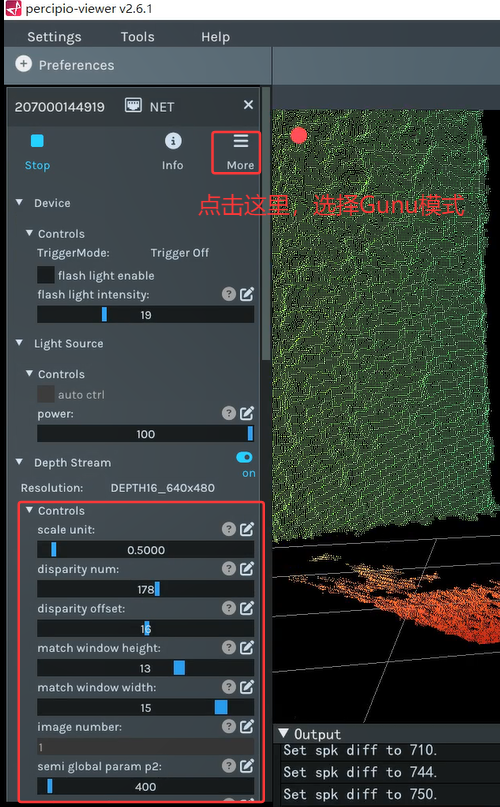
而SGBM参数主要作用如下:
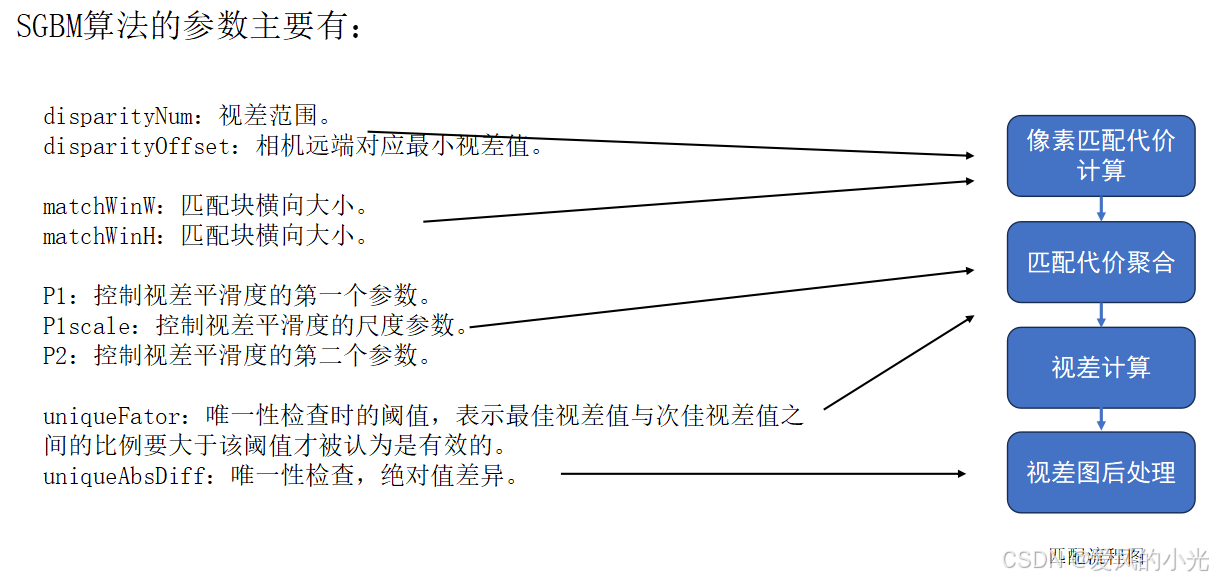
1.3.1 disparityNum和disparityOffset参数调整技巧
disparityNum :视差范围。
disparityOffset:最小视差值。
使用场景 :
客户想要更改预定义的深度范围(近远端值)。
调整方向 :深度范围减小, disparityNum大概率减小。
深度范围远端往相机端缩进, disparityOffset变大,反之亦反。
而disparityNum和disparityOffset参数设置,计算公式如下:
cpp
disparityNum = (baseline* fx) / depth_thres.first - (baseline* fx) / depth_thres.second + 15;
disparityOffset = ((baseline * fx) / (depth_thres.second)) - DISPARITY_TRANSLATION; 计算公式里的每个参数的具体含义如下:
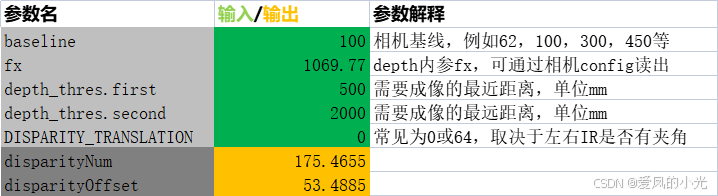
完整的计算表格从本帖子置顶位置下载。
1.3.2 matchWinW和matchWinH参数调整技巧
matchWinW :匹配块横向大小
matchWinH:匹配块纵向大小
使用场景 :
针对被测物要测量的特征(针对的是平滑面,还是物体细节),进行细微的调整。
调整方向 :一般的预设置的匹配块大小可认为是一个全局考虑的值;深度图越需要平滑的,匹配块大概率是从预设值向大调整,反之,亦反。
注意事项:请首先按照 matchWinW = matchWinH 的方式进行调整;
一般匹配块大小必须是奇数且大于等于3;
1.3.3 P1和P2参数调整技巧
P1 :控制视差平滑度的第一个参数。
P1_scale :控制视差平滑度的尺度参数。
P2:控制视差平滑度的第二个参数。
使用场景 : 需要调整深度图平滑度的情况。
调整方向 P1越大,越倾向于生成连续的视差图。 P1scale作用在平滑度上,P1sacle范围是0\~1,越大就越平滑。 P2越大,越倾向于消除小的视差变化。P2必须大于P1。
注意事项:建议先调整P1sacle,后P1,再P2。
1.3.4 uniqueFator和uniqueAbsDiff参数调整技巧
uniqueFator :唯一性检查阈值,最优与次优的比值约束。
uniqueAbsDiff:唯一性检查阈值,绝对值差阈值。
使用场景 :被测物有杂点、飞点、空洞过多等情况。
调整方向 :后处理约束参数调整过小会产生杂点或飞点;过大则会产生大片空洞。 一般uniqueAbsDiff 比 uniqueFator约束性更强。
1.4 推荐使用相机
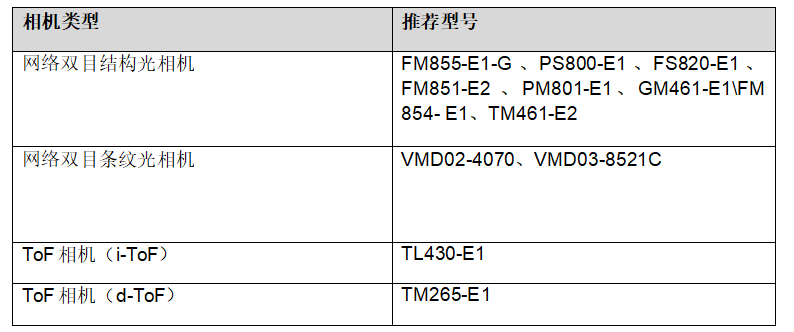
推荐原因如下:
2.新版PercipioViewer软件
图漾新的PMD和GM46X相机,需要使用新版本软件,支持相机参数保存,同时断电生效。
2.1 软件使用
待补充
3. 4.X.X版本 Camport ROS2 SDK
4.X.X SDK版本与3.X.X版本基本一致,详细编译过程可参考如下链接:
3.1 4.X.X版本 Camport ROS2 SDK源文件介绍
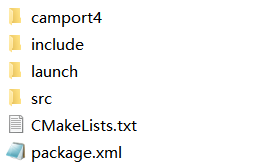
Camport ROS2 SDK 的目录,目录包含了camport4,include,launch,src。
1.README.md:
简述了 ROS2 编译过程。
2.src/percipio_camera/CMakeLists.txt:
Cmake 编译系统的规则文件。
3.src/percipio_camera/camport4:
这个目录包含了Percipio SDK的库文件和头文件。SDK 提供了与相机硬件交互的底层接口,用于初始化相机、获取图像和点云数据等。
4.src/percipio_camera/include:
这个目录包含了头文件,定义了接口和数据结构。
这些头文件通常用于声明相机驱动的类和函数。
5.src/percipio_camera/launch:
这个目录包含了ROS2的启动文件,用于启动节点和配置参数。
启动文件可以配置相机参数,并启动必要的节点。
该目录还包含以下python文件:
1.cam_base_cfg.launch.py :
2.cloud.py :
3.color.py :
4.depth.py :
5.multi_cam.launch.py :
6.offline_detect.py :
7.percipio_camera.launch.py :
8.registered_cloud.py :
9.send_trigger.py:
6.src/percipio_camera/package.xml:
描述功能包清单的文件,包括功能包的名称、版本号、作者信息、许可信息、编译依赖等。
7.src/percipio_camera/src:
包含主要的源代码文件,包括节点实现、相机驱动等。
3.2 4.X.X版本 Camport ROS2 SDK工作流程
3.2.1 包含头文件
包含必要的ROS2头文件,例如rclcpp。
3.2 2 初始化 ROS2 节点
使用 rclcpp::init(argc, argv); 初始化ROS2。
3.2.3 创建节点对象
使用 rclcpp::Node::make_shared("节点名称") ,创建节点对象。
3.2.4 创建发布者对象并实现发布逻辑
使用 node->create_publisher<消息类型>("话题名称", 队列大小) ;
创建发布者对象。实现发布逻辑,例如在回调函数中发布消息。
3.2.5 启动ROS2
使用 ros2 run 包名 节点名 运行指定的 ROS 2 节点。
使用 ros2 launch 包名 launch文件名 启动包含多个节点的 launch 文件。
3.3 4.X.X版本 ROS2 SDK环境配置与编译
主要针对ubuntu20.04对应ROS2 Foxy,以及ubuntu22.04对应ROS2 Humble两个版本的系统进行操作。
3.3.1 Ubuntu 20.04 下ROS2 Foxy环境配置与编译
环境配置与编译步骤:
第一步:设置编码
cpp
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8第二步:添加ROS源的公钥
cpp
sudo apt update && sudo apt install curl gnupg lsb-release
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg]
https://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null第三步:安装ROS2-foxy
cpp
sudo apt update
sudo apt upgrade
sudo apt install ros-foxy-desktop
sudo apt install python3-colcon-common-extensions
sudo apt install ros-foxy-camera-info-manager
sudo apt install ros-foxy-image-publisher
sudo apt install ros-foxy-diagnostic-updater第四步:设置环境变量
cpp
source /opt/ros/foxy/setup.bash
echo " source /opt/ros/foxy/setup.bash" >> ~/.bashrc第五步:camport4_ros2目录下,编译SDK
cpp
cd ~/ros2_ws/src/camport_ros2/
colcon build --event-handlers console_direct+ --cmake-args -DCMAKE_BUILD_TYPE=Release
sudo echo "source ./install/setup.bash" >> ~/.bashrc
source ~/.bashrccolcon build 说明:
--event-handlers console_direct+ :这个选项指定了事件处理程序。
console_direct+ 表示直接在控制台输出构建事件的详细信息。这样可以更清楚地看到构建过程中的每一步和可能的错误信息。
--cmake-args -DCMAKE_BUILD_TYPE=Release :这个选项传递了额外的 CMake 参数。在这种情况下,-DCMAKE_BUILD_TYPE=Release 设置了 CMake 的构建类型为 Release。这意味着构建将进行优化,适合发布版本,而不是调试版本。
编译后生成以下文件夹:
build :中间文件和目标文件。
install :可执行文件、库文件、头文件和其他资源文件。
log:包含编译和运行时生成的日志文件。
3.3.2 Ubuntu 22.04 下ROS2 Humble环境配置与编译
环境配置与编译步骤:
第一步:设置编码
cpp
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8第二步:添加ROS源的公钥
cpp
sudo apt update && sudo apt install curl gnupg lsb-release
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] https://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null第三步:安装ROS2-humble
cpp
sudo apt update
sudo apt upgrade
sudo apt install ros-humble-desktop
sudo apt install python3-colcon-common-extensions
sudo apt install ros-humble-camera-info-manager
sudo apt install ros-humble-image-publisher
sudo apt install ros-humble-diagnostic-updater第四步:设置环境变量
cpp
source /opt/ros/ humble /setup.bash
echo " source /opt/ros/ humble /setup.bash" >> ~/.bashrc第五步:camport3_ros2目录下,编译SDK
cpp
cd ~/ros2_ws/src/camport_ros2/
colcon build --event-handlers console_direct+ --cmake-args -DCMAKE_BUILD_TYPE=Release
sudo echo "source ./install/setup.bash" >> ~/.bashrc
source ~/.bashrc colcon build 说明:
--event-handlers console_direct+:这个选项指定了事件处理程序。console_direct+ 表示直接在控制台输出构建事件的详细信息。这样可以更清楚地看到构建过程中的每一步和可能的错误信息。
--cmake-args -DCMAKE_BUILD_TYPE=Release :这个选项传递了额外的 CMake 参数。在这种情况下,-DCMAKE_BUILD_TYPE=Release 设置了 CMake 的构建类型为Release。这意味着构建将进行优化,适合发布版本,而不是调试版本。
3.3.3 编译文件检查
编译后会生成build,install,log。
1.build:
包含了编译过程中生成的中间文件和目标文件。
包括对象文件(.o)、依赖文件等。 该目录在每次编译时都会被更新。
2.install:
这个目录包含了安装后的文件。
包括可执行文件、库文件、头文件和其他资源文件,用于运行时使用,包含了所有需要的文件和依赖项。
3.log:
这个目录包含了编译和运行时生成的日志文件。
包括编译日志、运行时日志和错误日志等,这些日志文件对于调试和诊断问题非常有用。
4.4.X.X版本 参数配置
4.1 方法一修改相机launch文件
1.在launch文件(percipio_camera.launch.py / multi_cam.launch.py )中配置相机启动时加载的参数。
2.该方法仅适用于设置 launch文件中包含的参数,具体步骤如下:进入"camport_ros2/install/percipio_camera/share/percipio_camera/launch " 路径。
3.如需配置相机的所有参数,可选择使用PercipioViewer提前将相机参数配置写入Storage,后续打开相机后参数便是配置好的状态。设置步骤请参见参数配置管理
4.1.1 单相机
如使用单台相机,打开percipio_camera.launch.py 文件,并根据需要修改参数配置,可配参数的说明见下表。
指定相机SN号:
cpp
DeclareLaunchArgument('serial_number', default_value='"207000106930"'),指定相机IP地址:
cpp
DeclareLaunchArgument('device_ip', default_value='192.168.120.112'),注解 :如果不通过
SN或IP去指定相机,默认打开找到的第一台相机。
4.1.2 多相机
如使用多台相机,打开 multi_cam.launch.py 文件,并根据需要修改参数配置,可配参数的说明见下表。
multi_cam.launch.py文件默认是配置两台相机,如需配置更多相机,请模仿 launch 1、launch2 的内容添加 launch x (x=3,4......n)。
4.1.3 launch文件参数说明
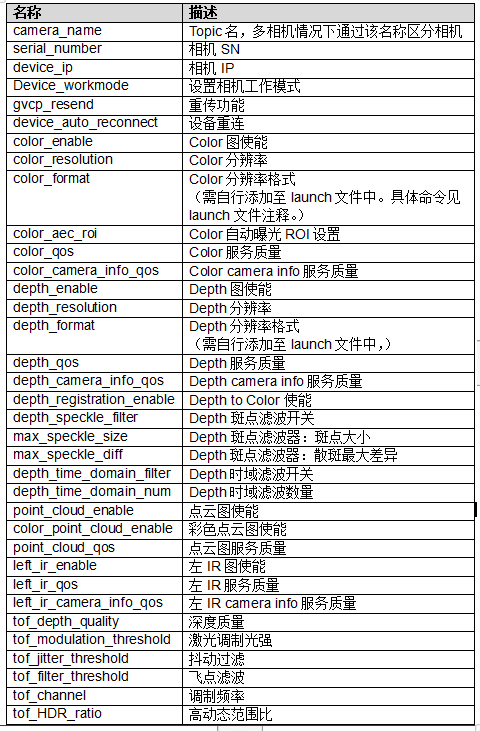
launch文件属性说明
4.2 通过看图软件修改参数
1.GigE2.0相机(除 PMD系列与GM 系列以外的相机)
通过Percipio Viewer 或 Camport SDK 3.X.X 将参数保存至相机 Storage 区,ROS启动时将自动加载storage 区的参数配置并开始采集图像。
2.GigE2.1 相机(PMD 系列与 GM 系列相机)
通过Camport SDK 4.X.X或新版PercipioViewer设置相机默认加载目标 User Set 属性组,相机上电后将自动加载该User Set属性组的参数配置。
5.4.X.X版本 Camport ROS2常见问题汇总
5.1 启用时域滤波后,运行python3 depth.py无法立即输出深度图,怎么办?
时域滤波功能,需先采集 2-10 帧原始深度数据填充缓冲区(具体帧数可配置),经多帧时间域融合计算后才会输出深度图像,因此程序启动后会存在短暂延迟。
5.2 相机实际输出的图像格式或分辨率为什么未按照用户预设参数(userset)或存储区(storage)的配置?
答:如相机存储区或者 userset 中设置了图像的格式和分辨率,且percipio.launch 文件也配置了图像的分辨率和格式,那么,ROS2优先通过launch文件中配置的参数。
6.补充资料
1.Cmake菜谱