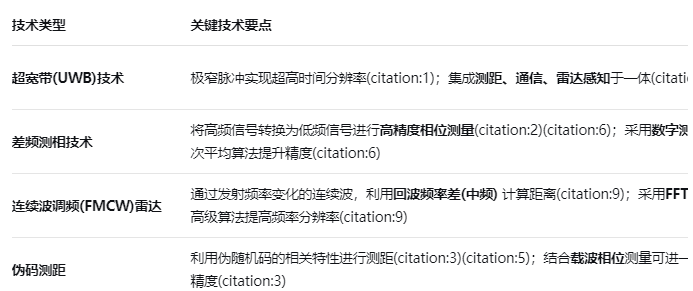
表格汇总了主要技术及其核心挑战
应对技术挑战的策略
采用传感器融合方案:不要依赖单一传感器。常见的做法是将UWB或伪码测距提供的绝对位置信息,与IMU(惯性测量单元) 的高速动态数据相结合,再辅以气压计、光流传感器等,通过卡尔曼滤波等算法进行数据融合,从而相互补盲,提升系统在复杂环境下的鲁棒性(citation:1)(citation:4)。
优化天线设计与布局:天线的性能至关重要。采用圆极化天线可以减轻无人机姿态变化引起的信号衰减(citation:10)。在系统集成时,确保天线安装位置远离电机、电调等大功率干扰源,并尽量保证30度以上仰角无遮挡,以获得最佳通信效果(citation:10)。
重视硬件选型与系统集成:选择高稳定度的温度补偿晶体振荡器作为时钟源,从根源上减小频率误差(citation:6)。在电路设计上,为射频模块提供纯净、稳定的电源并做好电磁屏蔽,防止自身和外部干扰(citation:10)。同时,必须在轻量化、功耗、散热和性能之间取得平衡(citation:4)。
利用智能算法补偿误差:在信号处理层面,可以采用自适应滤波算法来抑制多路径效应和噪声(citation:4)。对于FMCW雷达的栅栏效应,可以使用像CZT(Chirp-Z变换) 这样更精密的频谱分析算法来插值估计真实频率,从而提高测距精度(citation:9)。
总结与选型建议
总的来说,无人机无线电测距技术的选择没有绝对的"最佳",只有"最合适"。最终决策需基于你的核心需求:
极致精度与实时反应:如无人机精密编队、自主避障,UWB技术是目前的首选(citation:1)。
成本敏感与常规应用:如定点悬停、区域巡防,优化后的伪码测距或差频测相方案可能更具性价比(citation:2)(citation:5)(citation:6)。
复杂环境高度测量:对于贴近地面的相对高度测量,FMCW雷达高度表比超声波和激光雷达有更好的环境适应性(citation:1)(citation:9)。
