论文名称:LAM-YOLO: Drones-based Small Object Detection
on Lighting-Occlusion Attention Mechanism YOLO
论文原文 (Paper) :https://arxiv.org/abs/2408.01897
GitHub 仓库链接 :https://github.com/AITricks/AITricks
哔哩哔哩视频讲解 :https://space.bilibili.com/57394501?spm_id_from=333.337.0.0
目录
-
-
- [1. 核心思想](#1. 核心思想)
- [2. 背景与动机](#2. 背景与动机)
- [3. 主要贡献点](#3. 主要贡献点)
- [4. 方法细节](#4. 方法细节)
- [5. 即插即用模块的作用](#5. 即插即用模块的作用)
-
1. 核心思想
本文针对无人机航拍图像中目标尺寸多变、遮挡严重、光照复杂 等挑战,提出了一种名为 LAM-YOLO 的新型目标检测模型。该模型以 YOLOv8 为基础,引入了 光照-遮挡注意力机制 (LAM) 来增强模型在复杂光照和遮挡环境下的特征提取能力,并利用 内卷 (Involution) 模块改善特征层之间的交互。此外,通过引入 辅助小目标检测头 和改进的 SIB-IoU 损失函数,显著提升了对微小和密集目标的检测精度,在 VisDrone2019 数据集上实现了 7.1% 的 mAP 提升。
2. 背景与动机
-
文本角度总结 :
无人机航拍图像中的小目标检测面临着独特的挑战:目标尺寸极小且变化大、易被遮挡、光照条件多变(如强光或昏暗)。现有的 YOLO 系列模型虽然速度快,但在这些复杂场景下往往出现漏检和误检。
- 尺寸问题:传统 YOLO 的检测头对于远距离、极微小的目标(如行人、自行车)感受野不足。
- 特征提取不足:标准卷积难以捕捉全局光照变化和遮挡下的细微特征,且容易将目标特征淹没在背景噪声中。
- 回归精度 :现有的 IoU 损失函数在处理小目标时,对位置偏差不够敏感,导致定位不准。
因此,本文旨在设计一种能够自适应光照变化、抗遮挡且对小目标极其敏感的检测框架。
-
动机图解分析:
- 图 1 (Fig. 1): 挑战展示
- (a) 密集小目标:展示了密集的行人和车辆,说明了目标极小且易混淆。
- (b) 遮挡:展示了树木遮挡下的车辆,说明了仅靠局部特征难以识别完整目标。
- © & (d) 极端光照:分别展示了强光过曝和夜间昏暗场景,说明了光照变化会严重影响特征的显著性。
- 总结 :这四幅图直观地列出了 LAM-YOLO 想要解决的三大核心痛点:小、遮、光。这也引出了为何需要引入专门的 LAM 注意力模块和辅助检测头。
- 图 10 (Fig. 10): LAM 层数热力图对比
- 现象:随着 LAM 层数从 0 增加到 6,热力图(Grad-CAM)对目标的关注度逐渐增强,背景噪声被抑制。
- 分析:这直观地证明了 LAM 模块在提取关键特征、抑制复杂背景干扰方面的有效性,验证了引入该模块的动机。
- 图 1 (Fig. 1): 挑战展示
3. 主要贡献点
-
贡献点 1:提出了光照-遮挡注意力模块 (LAM)
设计了一种混合注意力机制,结合了通道注意力和基于窗口的自注意力。它利用全局统计信息和强大的局部特征提取能力,专门用于解决光照变化和遮挡带来的特征模糊问题,使模型能"看清"暗处或被遮挡的目标。
-
贡献点 2:改进了检测头与特征融合 (Auxiliary Heads & Involution)
在 YOLOv8 原有三个检测头的基础上,增加了两个专门针对微小目标的辅助检测头 (160x160 和 320x320 分辨率),显著降低了小目标的漏检率。同时,在 Neck 部分引入 Involution(内卷) 模块,增强了不同尺度特征层之间的交互,提高了特征表示的丰富性。
-
贡献点 3:提出了 SIB-IoU 损失函数
针对小目标回归难的问题,提出了一种新的边界框回归损失 SIB-IoU。它引入了比例因子 (Ratio) 来生成不同尺度的辅助边界框,计算 Soft Intersection,从而在不同重叠度下都能提供有效的梯度,加速收敛并提高定位精度。
4. 方法细节
-
整体网络架构(对应 Figure 2):
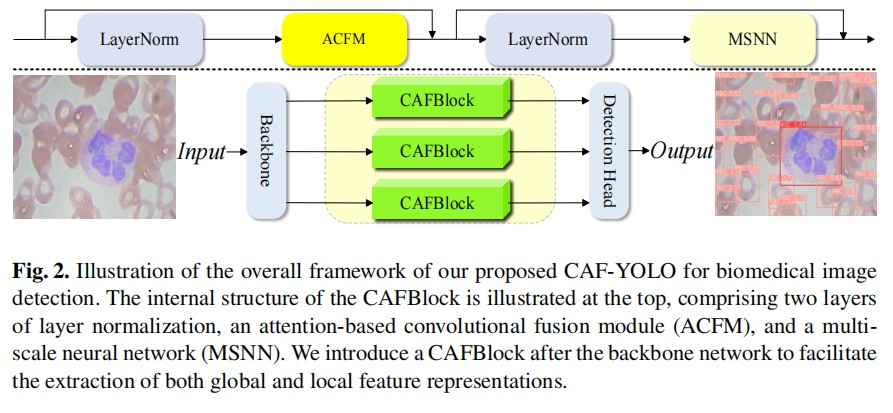
- 主干网络 (Backbone) :采用 CSPDarkNet 提取特征。在 Backbone 的末端,插入了 LAM 模块,用于在特征进入 Neck 之前增强其对光照和遮挡的鲁棒性。
- 颈部网络 (Neck) :
- FPN + PAN:采用特征金字塔和路径聚合网络进行多尺度融合。
- Involution 模块:在 FPN 的横向连接处引入 Involution,替代传统卷积,以增强跨通道和跨空间的特征交互。
- LAM 模块:在 PAN 的输出阶段也嵌入了 LAM,进一步提纯融合后的特征。
- 检测头 (Head) :
- 5 个检测头 :除了原有的 P3, P4, P5(针对大中小目标),新增了 P1, P2 两个高分辨率检测头,专门负责极微小目标的检测。
- SIB-IoU Loss:用于训练阶段的边界框回归。
-
核心创新模块详解:
-
模块 A:光照-遮挡注意力模块 (LAM)(对应 Figure 3)
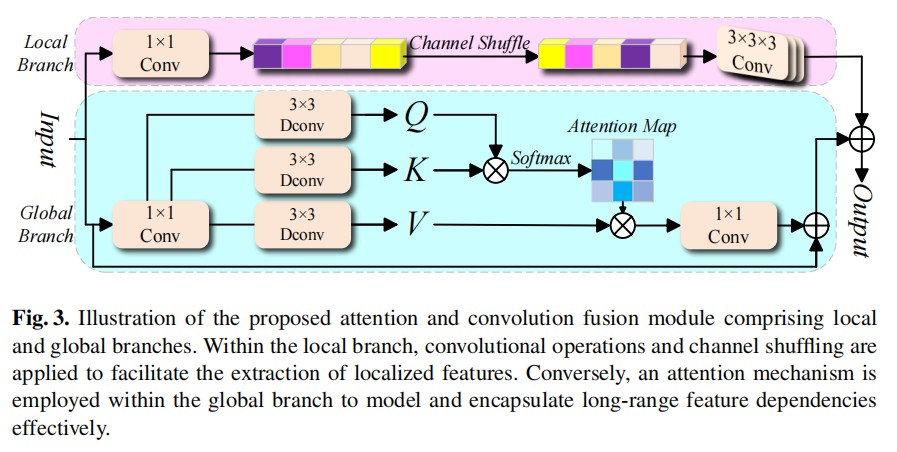
- 内部结构 :由三个子模块串联组成:浅层特征提取 、深层特征提取 (RHAG) 和 图像重建。
- 核心组件 (RHAG) :残差混合注意力组 (RHAG) 包含:
- VAB (Vision-aware Attention Block) :包含 SW-MSA (Shifted Window Multi-head Self-Attention) 和 MLP。利用窗口自注意力捕捉局部上下文,同时节省计算量。
- OLAB (Overlapping Light-aware Attention Block) :包含 OCA (Overlapping Cross Attention) 和 MLP。用于增强特征的重叠区域关注度。
- CAB (Channel Attention Block):在 VAB 内部并联,利用全局平均池化和卷积来重新校准通道权重,强化对关键特征通道(如特定光照响应通道)的关注。
- 设计目的:通过结合通道注意力(关注"什么"特征重要)和窗口自注意力(关注"哪里"特征重要),LAM 能够在复杂光照下动态调整特征权重,突出被遮挡或昏暗的目标。
-
模块 B:内卷模块 (Involution)(对应 Figure 4)
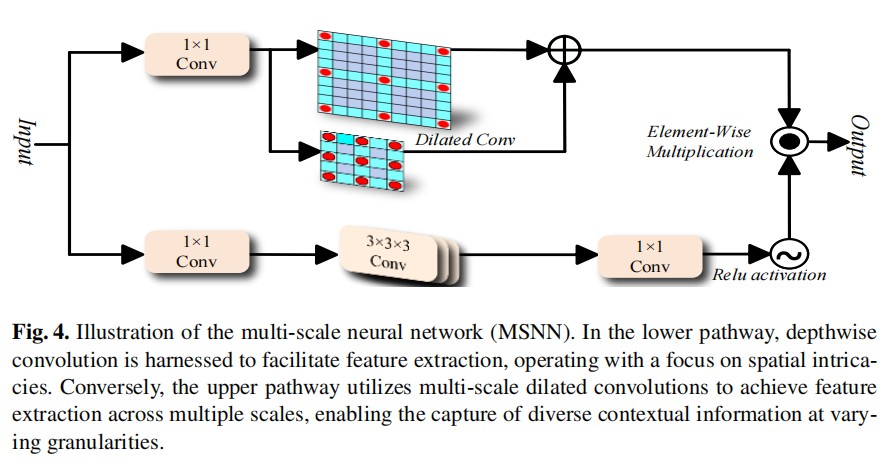
- 设计理念 :传统的卷积在空间上是共享权重的(空间不变性),但在通道上是密集的。Involution 反其道而行之,在空间上特定(Spatial-specific) ,但在通道上共享(Channel-agnostic)。
- 数据流 :
- 核生成 (Kernel Generation) :对于输入特征图上的每个像素点 ( i , j ) (i, j) (i,j),利用 ϕ \phi ϕ 函数(由 1 × 1 1\times1 1×1 卷积实现)从该像素自身生成一个特定的 K × K K\times K K×K 卷积核 H i , j \mathcal{H}_{i,j} Hi,j。
- 乘加运算 (Multiply-Add) :将生成的核 H i , j \mathcal{H}_{i,j} Hi,j 与该像素周围 K × K K\times K K×K 的邻域进行乘加运算。
- 作用:这种机制使得卷积核能够根据具体的空间位置自适应地变化,从而更好地捕捉不同位置(如光照不均区域)的特征,同时减少了参数量。
-
-
理念与机制总结:
- 核心理念 :"关注微小,适应环境"。
- LAM 机制:通过模拟人类视觉对光照和遮挡的适应性(非视觉效应),动态调整特征响应,使得在暗处或遮挡下的目标特征依然显著。
- SIB-IoU 机制:通过引入缩放因子 Ratio,人为构造"内框"和"外框"。当预测框与真值框重叠较少时,外框能提供梯度;当重叠较多时,内框能提供更精细的约束。这解决了小目标 IoU 变化剧烈导致的训练不稳定问题。
-
图解总结:
- Fig. 2 清晰展示了 5 头架构和 LAM/Involution 的插入位置,强调了对多尺度(特别是小尺度)的极致追求。
- Fig. 3 详细拆解了 LAM 的内部结构,展示了如何通过残差连接堆叠多种注意力模块(VAB, OLAB, CAB)来逐步提炼特征。
- Fig. 7 的 Precision-Recall 曲线显示,LAM-YOLO(粗蓝线)在所有阈值下都包络了其他模型,证明了其综合性能的优越性。
5. 即插即用模块的作用
本文提出的模块通用性较强,可应用于其他目标检测任务:
-
LAM 模块 (Lighting-occlusion Attention Module)
- 适用场景 :低光照 、强光干扰 、雾天 或遮挡严重的检测/分割任务。
- 具体应用 :
- 自动驾驶:在夜间或隧道场景下,将 LAM 插入到检测器的 Backbone 或 Neck 中,提升对暗处车辆和行人的感知。
- 安防监控:用于处理光照变化剧烈的监控视频,减少误报。
-
SIB-IoU Loss (Soft Inner-section Bounding-box IoU)
- 适用场景 :小目标检测 、高精度定位任务。
- 具体应用 :
- 通用目标检测:可以直接替换现有的 CIoU, DIoU, SIoU 损失函数。在训练 YOLO 或 R-CNN 系列模型时,只需修改 Loss 计算公式,即可加速收敛并提升最终的 mAP,特别是对于小物体(Small Objects)的提升尤为明显。
-
Auxiliary Detection Heads (辅助小目标检测头)
- 适用场景 :无人机航拍 、卫星遥感 、显微镜图像分析。
- 具体应用 :
- 微小瑕疵检测:在工业质检中,如果目标极其微小(如像素占比 < 1%),可以借鉴此策略,在现有的 P3-P5 层级下继续上采样,增加 P2 甚至 P1 层级的检测头,专门负责"显微镜级"的检测。
到此,所有的内容就基本讲完了。如果觉得这篇文章对你有用,记得点赞、收藏并分享给你的小伙伴们哦😄。
获取更多高质量论文及完整源码关注 【AI即插即用】