目录
-
- 1.摘要
- 2.MDRP-DPOD模型
- 3.提出算法
- [4. 结果展示](#4. 结果展示)
- 5.参考文献
- 6.代码获取
- 7.算法辅导·应用定制·读者交流
1.摘要
随着电子商务的快速发展,物流服务类型日益多样化。针对城市环境中的物流需求,本文提出了一种由多架无人机与智能快件柜(SPLs)协同作业的物流系统,以为客户提供包裹取件、配送以及城内按需投递服务。不同于传统的取件与配送服务,城内按需投递服务要求无人机从某一客户处取件并配送至另一客户处。为了在具有弹性时间窗的前提下为客户规划合理的服务路线,多无人机协同路径规划问题显得尤为关键。本文构建了一个多目标混合整数规划模型,以同时最小化运输成本和最大化客户满意度为目标,该模型综合考虑了无人机的动态能耗、软时间窗以及因单载荷能力所引发的任务优先级约束。为求解该问题,本文设计了一种基于自适应大邻域搜索的多目标算法(ALNSMO)。
2.MDRP-DPOD模型
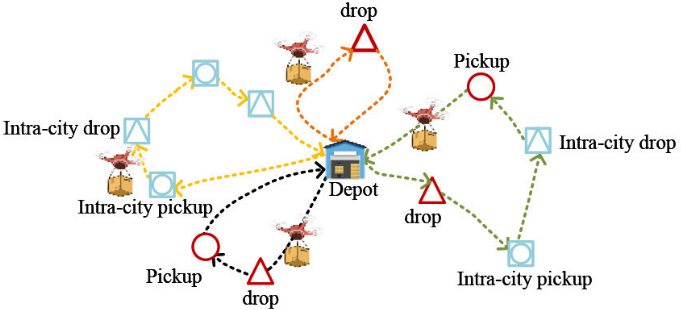
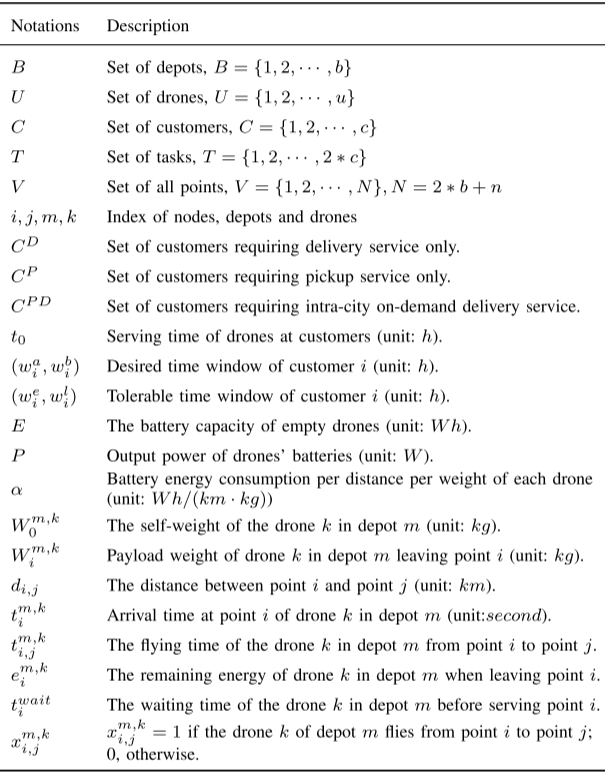
论文研究了一个城市中多仓库、多无人机协同配送的问题,设定多个仓库配备无人机,智能快件柜(SPLs)作为包裹取件/配送点,充当客户角色。客户分为三类:需要包裹配送(CD)、取件(CP)和城内按需配送(CPD)。无人机一次运输一个包裹,且需要根据时间窗进行服务,考虑电池更换等因素提升运输效率。
模型通过引入虚拟任务和虚拟仓库来处理任务分配和无人机路径规划问题,并确保无人机能够在飞行范围内高效完成多点配送任务。每个客户和仓库均有编号,以确定访问顺序,同时考虑了每个任务的服务时间窗。
MDRP-DPOD的目标是通过协同路径规划,最小化运输成本并最大化客户满意度。运输成本包括飞行距离和活跃无人机数量,后者会影响折旧成本,无人机的运输成本:
min f 1 = σ ∑ m ∈ B k ∈ U ∑ i ∈ B U T ∑ j ∈ B U T , j ≠ i d i , j ⋅ x i , j m , k + ρ ( b ⋅ u − ∑ m ∈ B k ∈ U ∑ i ∈ B 0 ∑ j ∈ B 1 x i , j m , k ) \min f_1 = \sigma \sum_{m \in B_k \in U} \sum_{i \in BUT} \sum_{j \in BUT, j \neq i} d_{i,j} \cdot x_{i,j}^{m,k} + \rho (b \cdot u - \sum_{m \in B_k \in U} \sum_{i \in B_0} \sum_{j \in B_1} x_{i,j}^{m,k}) minf1=σm∈Bk∈U∑i∈BUT∑j∈BUT,j=i∑di,j⋅xi,jm,k+ρ(b⋅u−m∈Bk∈U∑i∈B0∑j∈B1∑xi,jm,k)
顾客整体满意度:
max f 2 = ∑ m ∈ B k ∈ U ∑ i ∈ C S i m , k \max f_2 = \sum_{m \in B_k \in U} \sum_{i \in C} S_{i}^{m,k} maxf2=m∈Bk∈U∑i∈C∑Sim,k
3.提出算法
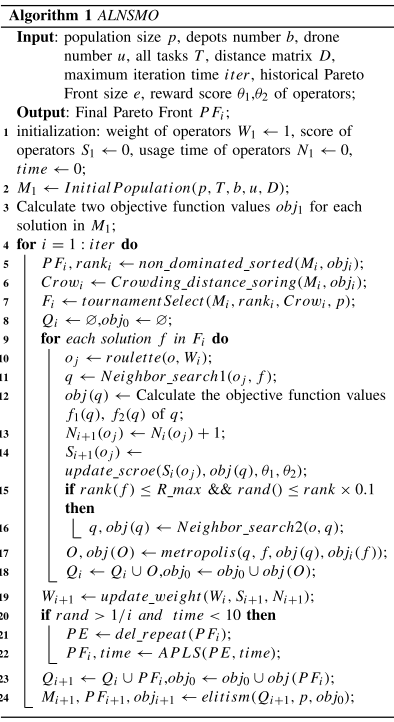
本文提出了基于自适应大邻域搜索(ALNSMO)的多目标优化算法,用于解决MDRP-DPOD问题。人口初始化,通过任务分配策略(如距离优先、时间优先等)生成初始种群,并根据任务分配方案生成符合约束的初始路径和时间窗。迭代优化,使用自适应大邻域搜索(ALNS)重新分配任务和调整调度时间窗,并通过自适应Pareto局部搜索(APLS)在Pareto前沿中搜索高质量解。每次迭代使用快速非支配排序、拥挤度和二进制锦标赛机制评估个体适应度,优先使用高效操作算子,该算法通过改进的Metropolis策略接受新解,不断优化种群,最终得到近似的Pareto解集。
编码方式
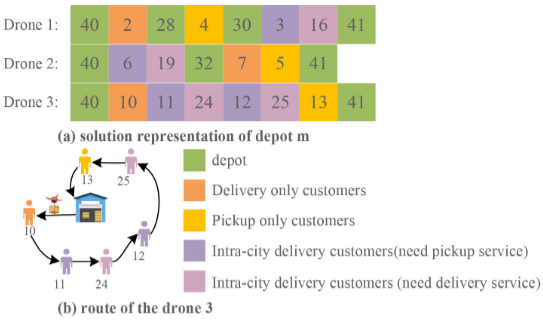
MDRP-DPOD问题的解需要同时考虑空间和时间维度,因此设计了两种染色体结构:路径规划方案表示:染色体1表示所有无人机的路径规划方案,解决了每个仓库中所有无人机的路径问题。假设一个仓库有三架无人机为13个客户提供服务,路径规划方案通过不同类型的客户节点来表示。每行表示一架无人机的路径,连续的单元格表示无人机访问的节点顺序。每个解需满足所有约束条件。
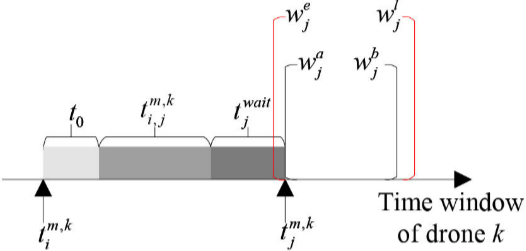
时间窗表示:染色体2表示所有无人机的调度时间窗。每个客户有期望的服务时间窗,最早和最晚服务时间。无人机的服务时间和从一个客户到另一个客户的旅行时间被考虑在内。无人机的到达时间是通过前一客户的到达时间、服务时间、旅行时间和等待时间的累计来确定的。
初始解决方案构建策略
为了解决MDRP-DPOD问题,初始解构建策略通过三种启发式规则进行任务分配:距离优先,将任务分配给距离最近的仓库,并按客户时间窗排序后分配给无人机。时间优先,根据时间窗排序任务,将相邻任务分配给不同仓库和无人机。随机分配,将任务随机分配给无人机。基于贪心原则为每架无人机初始化路径规划和调度时间窗,旨在最大化客户满意度。调度时间窗由旅行时间、服务时间和等待时间组成。
自适应Pareto局部搜索算法
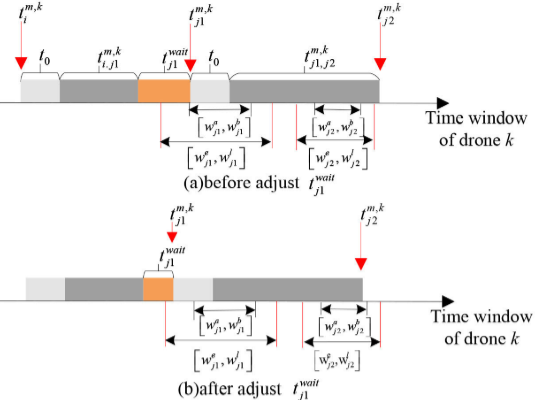
自适应Pareto局部搜索(APLS)旨在提高搜索效率,避免传统Pareto局部搜索中的高计算复杂度。APLS仅关注非重复的Pareto前沿,通过基于变量邻域下降的操作算子(PLS-VND)逐步优化解,若新解优于当前解,则接受并继续优化。此外,引入LS-wait操作符调整调度时间窗,解决客户期望时间重叠的问题,最大化整体客户满意度。通过这些优化,APLS提升了解的质量和搜索效率。
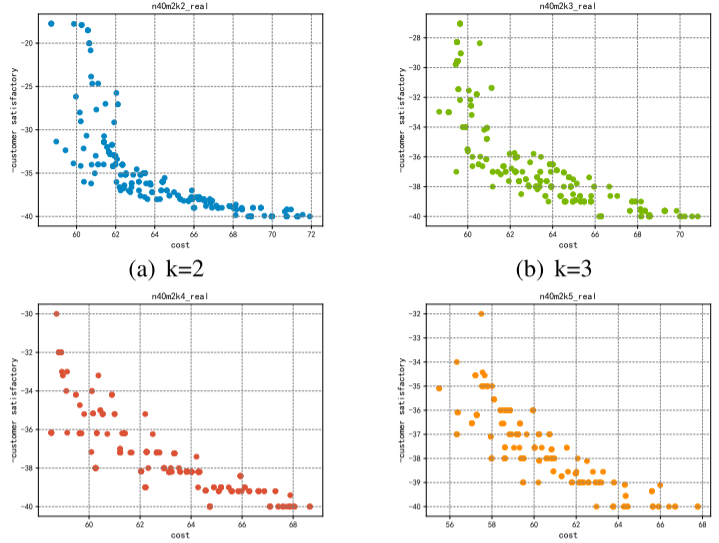
4. 结果展示
5.参考文献
1 Hong F, Wu G, Wang Y, et al. Multi-Objective Multi-Drone Collaborative Routing Problem With Heterogeneous Delivery and Pickup ServiceJ. IEEE Transactions on Intelligent Transportation Systems, 2025.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx