文章目录
特征点匹配
视觉里程计的核心问题是根据图像估计相机运动,而这通常通过帧间的图像变化实现。为了简化运算,我们会从图像中选取特征点,这些点在相机视角发生较小变化时仍然存在,通过特征点在图像上的变化,估计相机位姿的改变。
特征点由关键点 和描述子两部分组成。前者指的是特征点在图像中的位置,后者则指该关键点周围像素的信息,这里讲讲比较有代表性的 ORB 特征
ORB 特征
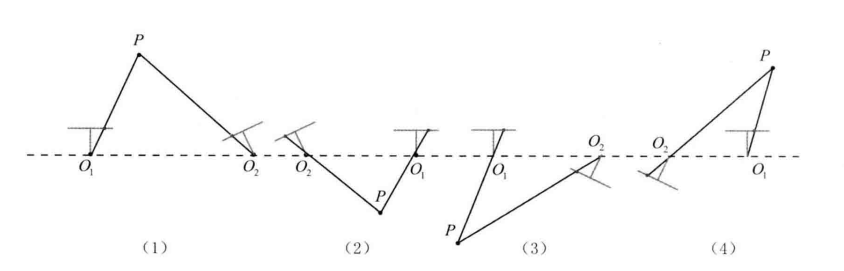
FAST 关键点
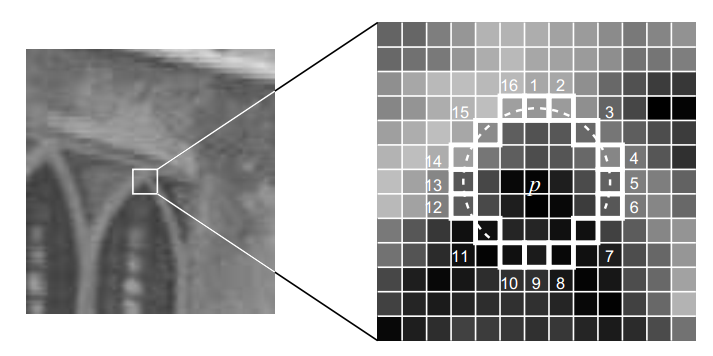
FAST 算法的思路为:如果一个像素与周围邻域的像素差别过大时,就认为其为一个角点。由于仅仅需要比较像素之间的灰度值大小,计算量要小得多
其实现步骤如下:
- 在图像中选取一像素 p p p ,假设其亮度为 I P I_P IP
- 设定一个合适的阈值 T T T
- 选取以 p p p 为中心,半径为 3 的圆上的 16 个像素点
- 如果选取的像素点存在连续 的 N 个点的亮度大于 I P + T I_P+T IP+T 或者小于 I P − T I_P-T IP−T ,那么该点可视为一个角点( N N N 通常取12)
对于 FAST-12 算法,还有个预测试操作:直接检测邻域圆上的第 1,5,9,13 的像素点亮度,只有至少其中 3 个亮度大于 I P + T I_P+T IP+T 或者小于 I P − T I_P-T IP−T ,才有可能是一个角点
BRIEF 描述子
在提取到关键点之后,我们要对每个点计算其描述子。BRIEF 描述子是一种二进制描述子。在特征点周围选取 256 对随机像素 p , q p,q p,q ,如果 I P > I q I_P > I_q IP>Iq ,则即为 1,反之则即为 0
BRIEF 描述子之间的相似性通常用汉明距离来体现,即两个描述子按位比较,不相同的位数有多少,汉明距离就是多少
ORB 的改进
FAST 和 BRIEF 主要有两个缺点:
- 不具有尺度不变性:同一目标在图像中可能因拍摄距离不同而呈现不同大小,可能被误判为其他物体
- 不具有旋转不变性:同上,同一目标的不同旋转状态可能被误判为其他物体
尺度不变性
ORB 采用的是图像金字塔,即以原始图像为第 0 层,进行多次降采样(缩小)生成一系列不同分辨率的图像,这样就可以在进行特征匹配时达到尺度不变性的效果
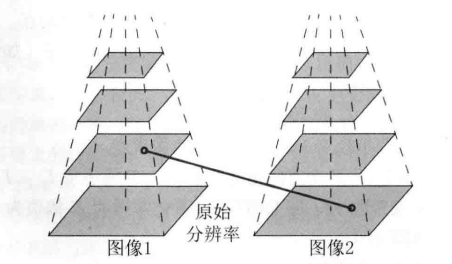
举个例子,我们在当前帧(frame 1)找到了一个特征点,此时相机向前移动靠近该特征点,使其在图像(frame 2)上占比变大。我们从 frame 2 图像金字塔的顶层开始搜索找到特征点的大致位置,然后将预测结果放大相应的倍数传递到下一层,如此反复直至在某一次获得了精确的匹配位置
旋转不变性
ORB 采用的是灰度质心法,其核心思想是为特征点计算出一个"主方向",后续生成描述子时,会先将图像块旋转到该主方向后再进行计算
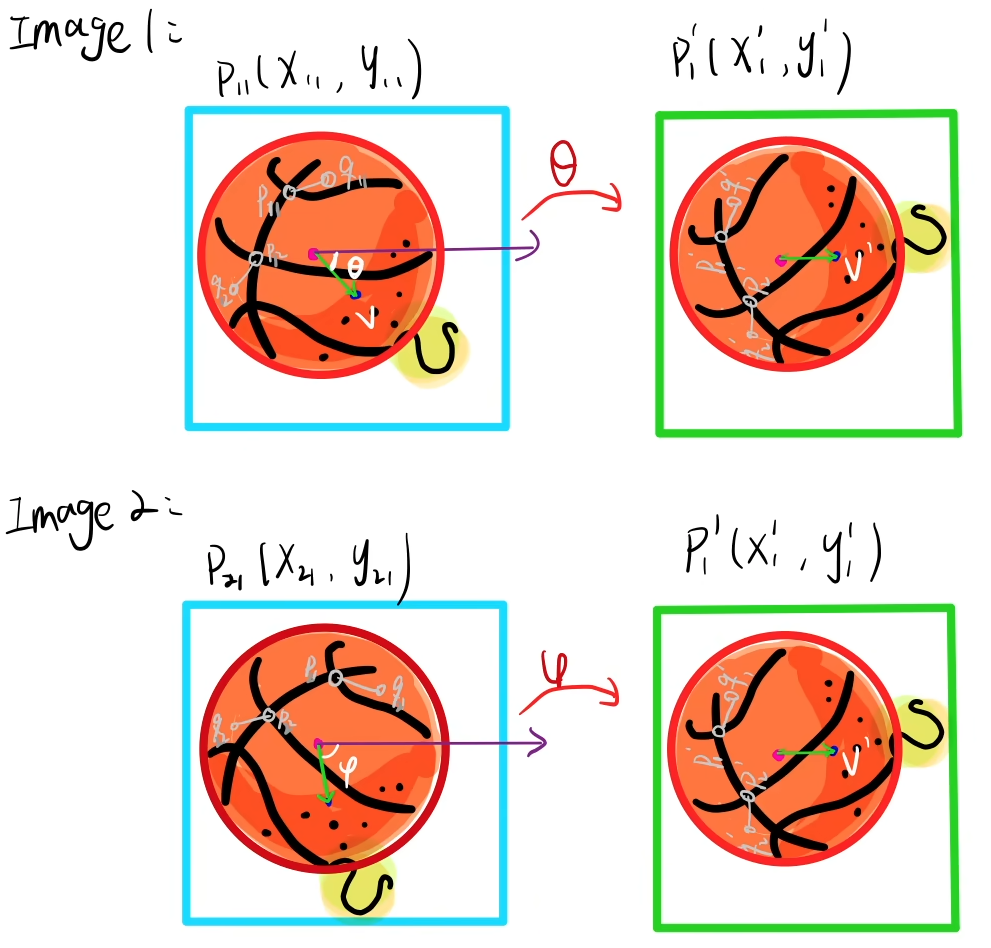
假设我们有一大小为 N × N N\times N N×N 的图像块 A A A ,其几何中心为 C C C
-
计算零阶距( m 00 m_{00} m00)和一阶距( m 10 , m 01 m_{10},m_{01} m10,m01):灰度值加权的坐标和,即"质量"分布中心
m p q = ∑ x , y ∈ B x p y q I ( x , y ) p , q = 0 , 1 m_{pq}=\sum_{x,y\in B}x^py^qI(x,y)\quad p,q={0,1} mpq=∑x,y∈BxpyqI(x,y)p,q=0,1 -
计算质心: C = ( m 10 m 00 , m 01 m 00 ) C=\left( \frac{m_{10}}{m_{00}},\frac{m_{01}}{m_{00}} \right) C=(m00m10,m00m01)
-
连接几何中心 O O O 和质心 C C C ,得到一方向向量 O C → \overrightarrow {OC} OC ,于是特征点的方向可定义为
θ = arctan ( m 01 m 10 ) \theta = \arctan \left(\frac{m_{01}}{m_{10}}\right) θ=arctan(m10m01)
下面是一份灰度质心法的使用和描述子计算的大致代码:
cpp
void computeORB(const cv::Mat img, std::vector<cv::KeyPoint> &keyPoints, std::vector<DescType> &descriptors)
{
const int half_patch_size = 8; // 用于计算方向的图像块大小
const int half_boundary = 16; // 定义图像边界缓冲区
for (auto &kp : keyPoints)
{
// 除去边界上的点
if (kp.pt.x < half_boundary || kp.pt.y < half_boundary || kp.pt.x >= img.cols - half_boundary || kp.pt.y >= img.rows - half_boundary)
{
descriptors.push_back({});
continue;
}
// 计算一阶矩
float m10 = 0, m01 = 0;
for (int dx = -half_patch_size; dx < half_patch_size; dx++)
{
for (int dy = -half_patch_size; dy < half_patch_size; dy++)
{
// 获取当前像素值
uchar pixel = img.at<uchar>(kp.pt.y + dy, kp.pt.x + dx);
m10 += dx * pixel;
m01 += dy * pixel;
}
}
// 计算特征点方向
float m_sqrt = sqrt(m10 * m10 + m01 * m01);
float sin_theta = m01 / m_sqrt;
float cos_theta = m10 / m_sqrt;
DescType desc(8, 0);
for (int i = 0; i < 8; i++)
{
uint32_t d = 0;
for (int j = 0; j < 32; j++)
{
int idx_pq = i * 8 + j;
cv::Point2f p(ORB_pattern[idx_pq * 4], ORB_pattern[idx_pq * 4 + 1]);
cv::Point2f q(ORB_pattern[idx_pq * 4 + 2], ORB_pattern[idx_pq * 4 + 3]);
// 计算旋转后的坐标
cv::Point2f p_rot = cv::Point2f(p.x * cos_theta - p.y * sin_theta, p.x * sin_theta + p.y * cos_theta) + kp.pt;
cv::Point2f q_rot = cv::Point2f(q.x * cos_theta - q.y * sin_theta, q.x * sin_theta + q.y * cos_theta) + kp.pt;
if (img.at<uchar>(p_rot.y, p_rot.x) < img.at<uchar>(q_rot.y, q_rot.x))
{
// 通过位运算 i << j,利用一个32位的整数存储32个二进制结果
d |= 1 << j;
}
}
desc[i] = d;
}
descriptors.push_back(desc);
}
}特征匹配
通过上面的步骤,我们现在得到两帧图像各自的特征点,那么我们该怎么找到他们之间的对应关系呢?
-
暴力匹配:对于两张图片的描述子集,一一计算汉明距离以找到对应的匹配点。实现简单,计算精确;但计算量大,仅适合特征点少的情况
-
快速近似最近邻(FLANN):在匹配前,FLANN 会先用其中一张图像的描述子集构建一个数据索引结构,这一步比较耗时但仅需进行一次,对于另一张图像的每一个描述子,在这个预先构建的索引结构上快速搜索找到近似的几个目标,最后利用最近邻距离和次近邻距离的比值筛选匹配结果。对于大规模的特征匹配速度几块,但结果相对并不精确,而且构建索引比较耗时,在较小特征点时使用可能得不偿失
2D-2D:对极几何
对于已匹配到特征点的相邻帧,可建立如下模型
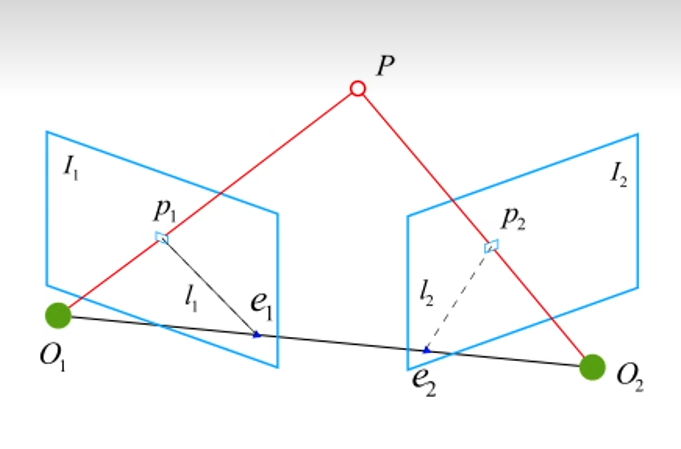
此时存在对极约束
x 2 T t ∧ R x 1 = p 2 T K − T t ∧ R K − 1 p 1 = 0 ( x 是 p 在归一化平面上的像素坐标 ) x_2^Tt^\wedge Rx_1 =p_2^TK^{-T}t^\wedge RK^{-1}p_1=0\quad(x是p在归一化平面上的像素坐标) x2Tt∧Rx1=p2TK−Tt∧RK−1p1=0(x是p在归一化平面上的像素坐标)
其中,我们通常定义 基础矩阵 E = t ∧ R , 本质矩阵 F = K − T E K − 1 \text{基础矩阵}~E=t^\wedge R,\quad \text{本质矩阵}~F=K^{-T}EK^{-1} 基础矩阵 E=t∧R,本质矩阵 F=K−TEK−1
可以进一步简化对极约束: x 2 T E x 1 = p 2 T F p 1 = 0 x_2^TEx_1=p_2^TFp_1=0 x2TEx1=p2TFp1=0
本质矩阵
本质矩阵 E E E 是一个 3 × 3 3\times3 3×3 矩阵
- 对 E E E ,乘以任意一个非零常数,对极约束仍然满足,故可认为 E E E 在不同尺度下是等价的
- 本质矩阵的奇异值必定是 σ , σ , 0 T ( σ > 0 ) \\sigma,\\sigma,0^T(\sigma>0) σ,σ,0T(σ>0)
- 由于平移和旋转各有 3 个自由度,故 t ∧ R t^\wedge R t∧R 共有 6 个自由度,由于尺度等价性,故 E E E 实际有 5 个自由度
通常使用八点法 来线性求解 E E E ,八点法利用 8 对匹配点构建线性方程组,通过 SVD 求解 E E E
对于一对匹配点,其归一化坐标为 x 1 = u 1 , v 1 , 1 , x 2 u 2 , v 2 , 1 x_1=u_1,v_1,1,~~x_2u_2,v_2,1 x1=u1,v1,1, x2u2,v2,1
( u 2 , v 2 , 1 ) ( e 1 e 2 e 3 e 4 e 5 e 6 e 7 e 8 e 9 ) ( u 1 u 2 u 3 ) = 0 \left( u_2,v_2,1 \right)\begin{pmatrix} e_1 & e_2 & e_3 \\ e_4 & e_5 & e_6 \\ e_7 & e_8 & e_9 \end{pmatrix}\begin{pmatrix} u_1 \\ u_2 \\ u_3 \end{pmatrix} = 0 (u2,v2,1) e1e4e7e2e5e8e3e6e9 u1u2u3 =0
将 e e e 转化为列向量,写成与 e e e 有关的线性形式
u 2 u 1 , u 2 v 1 , u 2 , v 2 u 1 , v 2 v 1 , v 2 , u 1 , v 1 , 1 ⋅ e = 0 u_2u_1,u_2v_1,u_2,v_2u_1,v_2v_1,v_2,u_1,v_1,1\cdot e=0 u2u1,u2v1,u2,v2u1,v2v1,v2,u1,v1,1⋅e=0
以此类推我们就得到了八个线性方程,如果这八对点都不共面(系数矩阵满秩),则可得到唯一解
对于估得的本质矩阵 E E E ,现在的任务是从中恢复出 R , t R,t R,t 。 对 E E E 进行奇异值分解(SVD)
E = U Σ V T E=U\Sigma V^T E=UΣVT
我们会得到 4 个可能的 ( R , t ) (R,t) (R,t) 解:
t 1 = U ( : , 3 ) , t 2 = − U ( : , 3 ) R 1 = U R z ( π 2 ) V T , R 2 = U R Z ( − π 2 ) V T t_1=U(:,3),\quad t_2=-U(:,3) \\ R_1=UR_z(\frac{\pi}{2})V^T, \quad R_2=UR_Z(-\frac{\pi}{2})V^T t1=U(:,3),t2=−U(:,3)R1=URz(2π)VT,R2=URZ(−2π)VT
只有正确解能够在两个相机中都拥有正的深度,只要检测点在两个相机下的深度就可筛选出正确解
多于 8 对点的情况
当匹配对数超过 8 对时,八点法可能构成超定方程无法求解,需要采取其他方法
-
最小二乘法:
-
设系数矩阵为 A A A ,此时有 A e = 0 Ae=0 Ae=0
min e ∣ ∣ A e ∣ ∣ 2 2 = min e ∣ ∣ U Σ V T e ∣ ∣ 2 \underset{e}{\min}||Ae||_2^2=\underset{e}{\min}||U\Sigma V^Te||^2 emin∣∣Ae∣∣22=emin∣∣UΣVTe∣∣2 -
因为 U U U 是正交矩阵不影响范数且对变量无影响,故舍去。此时设 y = V T e y=V^Te y=VTe ,由于 V V V 是正交矩阵, ∣ y ∣ = ∣ e ∣ = 1 |y|=|e|=1 ∣y∣=∣e∣=1
-
此时问题变为最小化 ∣ Σ y ∣ 2 = ] σ 1 2 y 1 2 + σ 2 2 y 2 2 + ... + σ 9 2 y 9 2 |\Sigma y|^2=]\sigma_1^2y_1^2+\sigma_2^2y_2^2+\ldots+\sigma_9^2y_9^2 ∣Σy∣2=]σ12y12+σ22y22+...+σ92y92
-
由于 σ 1 ≥ σ 2 ≥ ... ≥ σ 9 \sigma_1 \ge \sigma_2 \ge \ldots \ge \sigma_9 σ1≥σ2≥...≥σ9 ,权重必然被分配给 y 9 y_9 y9 ,即令 y = 0 , 0 , ... , 0 , 1 T y=0,0,\\ldots,0,1^T y=0,0,...,0,1T 。因此, e = V y = V . , 9 e=Vy=V_{.,9} e=Vy=V.,9
-
将求得的向量 e e e 转换会 3 × 3 3\times3 3×3 的矩阵 E ∗ E^* E∗
-
强制内在约束 :对 E ∗ E^* E∗ 进行 SVD 分解,将其奇异值矩阵设为 Σ ′ = d i a g ( ( σ 1 + σ 2 ) / 2 , ( σ 1 + σ 2 ) / 2 , 0 ) \Sigma'= diag((\sigma_1+\sigma_2)/2,(\sigma_1+\sigma_2)/2,0) Σ′=diag((σ1+σ2)/2,(σ1+σ2)/2,0) ,再重构得到最终的本质矩阵 E E E
最小二乘法虽然在数学上是最优解,但对误匹配和噪声及其敏感
-
-
随机采样一致性:
- 从所有匹配点中随机抽取 8 对,并使用这 8 对点使用八点法求出一个本质矩阵 E i E_i Ei
- 计算所有匹配点在模型 E i E_i Ei 下的误差(即对极约束 x 2 T E i x 1 \mathbf{x}_2^T E_i \mathbf{x}_1 x2TEix1 的值),如果误差小于阈值,则视为该模型的内点
- 重复以上步骤 N 次,最有模型即所有迭代中内点数量最多的那个
随机采样一致性虽然计算时间不确定,但其出色的鲁棒性,使其在实际应用中几乎总是使用
单应矩阵
当场景中的特征点都落在同一平面上(或者相机纯旋转)时,可以通过单应性进行运动估计
设匹配好的特征点 p 1 , p 2 p_1,p_2 p1,p2 ,特征点落在平面 P P P 上,该平面的法向量为 n n n ,原点(第一个相机的光心)到平面的负距离为 d d d
n T P + d = 0 ⇒ − n T P d = 1 n^TP+d=0\quad \Rightarrow \quad -\frac{n^TP}{d}=1 nTP+d=0⇒−dnTP=1
那么:
p 2 ≃ K ( R P + t ) ≃ K ( R P + t ⋅ ( − n T P d ) ) ≃ K ( R − t n T d ) K − 1 p 1 \begin{align*} p_2 &\simeq K(RP+t) \\ &\simeq K\left(RP+t \cdot (-\frac{n^TP}{d})\right) \\ &\simeq K\left(R-\frac{tn^T}{d}\right)K^{-1}p_1 \end{align*} p2≃K(RP+t)≃K(RP+t⋅(−dnTP))≃K(R−dtnT)K−1p1
于是我们得到了 p 1 p_1 p1 和 p 2 p_2 p2 之间的关系: p 2 ≃ H p 1 p_2 \simeq Hp_1 p2≃Hp1
消去尺度因子得到
u 2 = h 1 u 1 + h 2 v 1 + h 3 h 7 u 1 + h 8 v 1 + h 9 v 2 = h 4 u 1 + h 5 v 1 + h 6 h 7 u 1 + h 8 v 1 + h 9 u_2=\frac{h_1u_1+h_2v_1+h_3}{h_7u_1+h_8v_1+h_9} \qquad v_2=\frac{h_4u_1+h_5v_1+h_6}{h_7u_1+h_8v_1+h_9} u2=h7u1+h8v1+h9h1u1+h2v1+h3v2=h7u1+h8v1+h9h4u1+h5v1+h6
固定 h 9 = 1 h_9=1 h9=1 ,可整理得
h 1 u 1 + h 2 v 1 + h 3 − h 7 u 1 u 2 − h 8 v 1 u 2 = u 2 h 4 u 1 + h 5 v 1 + h 6 − h 7 u 1 v 2 − h 8 v 1 v 2 = v 2 h_1u_1+h_2v_1+h_3-h_7u_1u_2-h_8v_1u_2=u_2 \\ h_4u_1+h_5v_1+h_6-h_7u_1v_2-h_8v_1v_2=v_2 h1u1+h2v1+h3−h7u1u2−h8v1u2=u2h4u1+h5v1+h6−h7u1v2−h8v1v2=v2
提取其约束,令
A 1 = ( u 1 1 v 1 1 1 0 0 0 − u 1 1 u 2 1 − v 1 1 u 2 1 0 0 0 u 1 1 v 1 1 1 − i u 1 1 v 2 1 − v 1 1 v 2 1 ) A_1=\begin{pmatrix} u_1^1 & v_1^1 & 1 & 0 & 0 & 0 & -u_1^1u_2^1 & -v_1^1u_2^1 \\ 0 & 0 & 0 & u_1^1 & v_1^1 & 1 & -iu_1^1v_2^1 & -v_1^1v_2^1 \end{pmatrix} A1=(u110v110100u110v1101−u11u21−iu11v21−v11u21−v11v21)
将 4 对匹配点的方程合并,以恢复单应矩阵 H H H ,后面的求解就与本质矩阵 E E E 类似了
三角测量
对于单目 slam ,仅通过单张图像无法获得像素的深度信息,我们需要通过三角测量的方法估计深度
三角测量是已知两个相机之间的相对位姿 ( R , t ) (R,t) (R,t) 和一对匹配点 p 1 p_1 p1 和 p 2 p_2 p2 ,计算该匹配点所对应的三维空间点 P P P 的位置
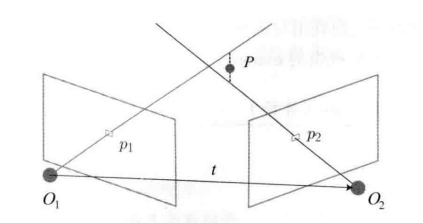
如图, O 1 , O 2 O_1,O_2 O1,O2 是相机光心, p 1 , p 2 p_1,p2 p1,p2 是匹配点。由于噪声的存在,两条射线未必会相交,因此找到一 P P P 点使它到两条射线的距离之和最小就是三角测量的目标
s 1 x 1 = p 1 s 2 x 2 = p 2 = R p 1 + t s_1x_1=p_1\\ s_2x_2=p_2=Rp_1+t s1x1=p1s2x2=p2=Rp1+t
其中 s 1 , s 2 s_1,s_2 s1,s2 是 P P P 点在两个坐标系下的深度值
s 2 x 2 = s 1 R x 1 + t ⇒ s 2 x 2 ∧ x 2 = 0 = s 1 x 2 ∧ R x 1 + x 2 ∧ t s_2x_2=s_1Rx_1+t \quad \Rightarrow \quad s_2x_2^\wedge x_2=0=s_1x_2^\wedge Rx_1+x_2^\wedge t s2x2=s1Rx1+t⇒s2x2∧x2=0=s1x2∧Rx1+x2∧t
于是我们得到了一个关于未知数 s 1 s_1 s1 的线性方程
3D-2D:PnP
当我们得知了场景中一些特征点的 3D 位置,并且又在当前帧观测到了,那么最少只需 3 个点对就可以估计相机运动
直接线性变换(DLT)
将旋转矩阵 R R R 和平移向量 t t t 视为未知的线性变量,直接构建线性方程求解
假设某个空间点 P = ( X , Y , Z , 1 ) T P=(X,Y,Z,1)^T P=(X,Y,Z,1)T ,在图像 I 1 I_1 I1 中投影到点 x 1 = ( u 1 , v 1 , 1 ) T x_1=(u_1,v_1,1)^T x1=(u1,v1,1)T ,此时定义一个包含了旋转和平移信息的增广矩阵 R ∣ t R\|t R∣t(和变换矩阵不同,其并不需要满足任何旋转矩阵的约束),此时我们得到如下展开形式:
s ( u 1 v 1 1 ) = ( t 1 t 2 t 3 t 4 t 5 t 6 t 7 t 8 t 9 t 10 t 11 t 12 ) ( X Y Z 1 ) s\begin{pmatrix}u_1\\v_1\\1\end{pmatrix}=\begin{pmatrix}t_1&t_2&t_3&t_4\\t_5&t_6&t_7&t_8\\t_9&t_{10}&t_{11}&t_{12}\end{pmatrix}\begin{pmatrix}X\\Y\\Z\\1\end{pmatrix} s u1v11 = t1t5t9t2t6t10t3t7t11t4t8t12 XYZ1
这里将旋转矩阵和平移向量看成 12 个未知数,因此最少需要 6 对匹配点来求解。但是通过该方法求得的 R R R 可能并不满足旋转矩阵应有的约束,因此我们需要找到一个最合适的旋转矩阵来对它近似。
P3P
仅需 3 对不共线的 3D-2D 点和一对验证点就能求解位姿
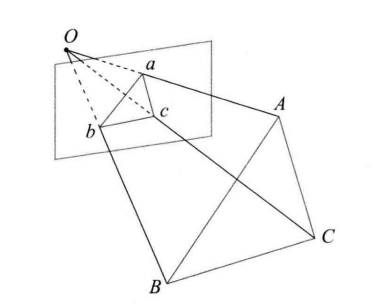
P3P 利用三角形相似,建立如下方程
O A 2 + O B 2 − 2 ⋅ O A ⋅ O B ⋅ cos ( ∠ A O B ) = A B 2 OA^2+OB^2-2\cdot OA\cdot OB\cdot\cos(∠AOB)=AB^2 OA2+OB2−2⋅OA⋅OB⋅cos(∠AOB)=AB2
其余两边建立类似方程,我们就可以得到 A , B , C A,B,C A,B,C 在相机坐标系下的 3 D 3D 3D 坐标,最后问题就转换为了一个 3 D − 3 D 3D-3D 3D−3D 问题
P3P 只能利用 3 点的信息,而且受噪声影响严重,只要 3 点共线或者存在误匹配,则算法失效
EPnP
EPnP 适用于任意数量点( ≥ 4 \ge4 ≥4),其核心思想是将 3D 点表示为四个控制点的加权和,将问题转化为求解控制点在相机坐标系下的坐标
-
选择世界坐标系下点的质心以及三个主方向上的点
-
每个 3D 点都可以表示为四个控制点的加权和
P i ω = ∑ j = 1 4 a i j c j ω P_i^{\omega}=\sum_{j=1}^4a_{ij}c_j^\omega Piω=j=1∑4aijcjω -
将控制点在相机坐标系下的坐标代入投影方程建立线性方程组
-
通过 SVD 求解控制点下的坐标代入相机坐标系下的坐标,并利用控制点在世界坐标和空间坐标系下的坐标,通过 3 D − 3 D 3D-3D 3D−3D 方法来求解
EPnP 因为稳定高效,是最常用的 P n P PnP PnP 方法之一(OpenCV 的 slovePnP 就是 EPnP)
最小重投影误差
上面的线性方法通常先求相机位姿,再求空间点的位置,非线性优化方法同样可以用于求解相机位姿和 3D 点位置,不同的是,非线性优化会将它们都视为优化变量。
设三维空间点 P i = X i , Y i , Z i T \mathbf{P_i}=X_i,Y_i,Z_i^T Pi=Xi,Yi,ZiT ,其投影的像素坐标为 u i = u i , v i T \mathbf{u_i}=u_i,v_i^T ui=ui,viT ,要计算相机位姿 R , t ( 其李群表示为 T ) R,t(\text{其李群表示为~}\mathbf{T}) R,t(其李群表示为 T) ,投影方程如下
s i u i v i 1 = K T X i Y i Z i 1 ( s i u i ) = K T P i s_i\begin{bmatrix}u_i\\v_i\\1 \end{bmatrix}=KT\begin{bmatrix}X_i\\Y_i\\Z_i\\1 \end{bmatrix}\\(s_iu_i)=KTP_i si uivi1 =KT XiYiZi1 (siui)=KTPi
于是我们可以构建最小二乘问题
T ∗ = arg min T 1 2 ∑ i = 1 n ∣ ∣ u i − 1 s i K T P i ∣ ∣ 2 2 T^*=\arg\underset{T}{\min}\frac{1}{2}\sum_{i=1}^n||u_i-\frac{1}{s_i}KTP_i||_2^2 T∗=argTmin21i=1∑n∣∣ui−si1KTPi∣∣22
其思路可以大致理解为:已知以目标在世界坐标系下的位置,利用估计的相机位姿将其转换为相机坐标系下的位置,再通过相机内参将其投影到图像平面,不断调整相机位姿的假设使投影点与实际观测点靠近
由于位姿属于李群,存在约束,所以可以先用李代数来参数化位姿,将其转化为无约束优化问题
定义 T = exp ( ξ ∧ ) T=\exp(\xi^\wedge) T=exp(ξ∧) 其中 ξ = ρ , ϕ T ∈ R 6 \xi=\\rho,\\phi^T\in \mathbb{R}^6 ξ=ρ,ϕT∈R6
则问题可重写为
ξ ∗ = arg min ξ 1 2 ∑ i = 1 n ∣ ∣ u i − π ( exp ( ξ ∧ ) P i ) ∣ ∣ 2 \xi^*=\arg\underset{\xi}{\min}\frac{1}{2}\sum_{i=1}^n||u_i-\pi(\exp(\xi^\wedge)P_i)||^2 ξ∗=argξmin21i=1∑n∣∣ui−π(exp(ξ∧)Pi)∣∣2
在进行高斯牛顿法或者列文伯格-马夸尔特法进行优化之前,我们需要求每个误差项关于优化变量的导数。设定误差量为 e e e ,则有
e ( x + Δ x ) ≈ e ( x ) + J T Δ x e(x+\Delta x)\approx e(x)+J^T\Delta x e(x+Δx)≈e(x)+JTΔx
雅可比矩阵推导
重投影误差关于李代数的导数可表示为
∂ e ∂ δ ξ = ∂ e ∂ P ′ ∂ P ′ ∂ δ ξ \frac{\partial e}{\partial \delta\xi}=\frac{\partial e}{\partial P'}\frac{\partial P'}{\partial \delta\xi} ∂δξ∂e=∂P′∂e∂δξ∂P′
已知投影方程
u = f x X ′ Z ′ + c x v = f y Y ′ Z ′ + c y u=f_x\frac{X'}{Z'}+c_x \qquad v=f_y\frac{Y'}{Z'}+c_y u=fxZ′X′+cxv=fyZ′Y′+cy
求偏导
∂ e ∂ P ′ = − ∂ u ∂ X ′ ∂ u ∂ Y ′ ∂ u ∂ Z ′ ∂ v ∂ X ′ ∂ v ∂ Y ′ ∂ v ∂ Z ′ = − f x Z ′ 0 − f x X ′ Z ′ 2 0 f y Z ′ − f y Y ′ Z ′ 2 \frac{\partial e}{\partial P'}=-\begin{bmatrix}\frac{\partial u}{\partial X'}&\frac{\partial u}{\partial Y'}&\frac{\partial u}{\partial Z'}\\\frac{\partial v}{\partial X'}&\frac{\partial v}{\partial Y'}&\frac{\partial v}{\partial Z'}\end{bmatrix}=-\begin{bmatrix}\frac{f_x}{Z'}&0&-\frac{f_xX'}{Z'^2}\\0&\frac{f_y}{Z'}&-\frac{f_yY'}{Z'^2}\end{bmatrix} ∂P′∂e=−∂X′∂u∂X′∂v∂Y′∂u∂Y′∂v∂Z′∂u∂Z′∂v=−Z′fx00Z′fy−Z′2fxX′−Z′2fyY′
根据李代数的左扰动模型
∂ P ′ ∂ δ ξ = I , − P ′ ∧ = 1 0 0 0 Z ′ − Y ′ 0 1 0 − Z ′ 0 X ′ 0 0 1 Y ′ − X ′ 0 \frac{\partial P'}{\partial\delta\xi}=\begin{bmatrix}I,-P'^\wedge\end{bmatrix}=\begin{bmatrix}1&0&0&0&Z'&-Y'\\0&1&0&-Z'&0&X'\\0&0&1&Y'&-X'&0\end{bmatrix} ∂δξ∂P′=I,−P′∧= 1000100010−Z′Y′Z′0−X′−Y′X′0
合并两部分即可得到雅可比矩阵
J = ∂ e ∂ P ′ ⋅ ∂ P ′ ∂ δ ξ = − f x Z ′ 0 − f x X ′ Z ′ 2 − f x X ′ Y ′ Z ′ 2 f x + f x X ′ 2 Z ′ 2 − f x Y ′ Z ′ 0 f y Z ′ − f y Y ′ Z ′ 2 − f y − f y Y ′ 2 Z ′ 2 f y X ′ Y ′ Z ′ 2 f y X ′ Z ′ J=\frac{\partial e}{\partial P'}\cdot\frac{\partial P'}{\partial \delta\xi}=-\begin{bmatrix} \frac{f_x}{Z'}&0&-\frac{f_xX'}{Z'^2}&-\frac{fxX'Y'}{Z'^2}&f_x+\frac{f_xX'^2}{Z'^2}&-\frac{f_xY'}{Z'}\\0&\frac{f_y}{Z'}&-\frac{f_yY'}{Z'^2}&-f_y-\frac{f_yY'^2}{Z'^2}&\frac{f_yX'Y'}{Z'^2}&\frac{f_yX'}{Z'} \end{bmatrix} J=∂P′∂e⋅∂δξ∂P′=−Z′fx00Z′fy−Z′2fxX′−Z′2fyY′−Z′2fxX′Y′−fy−Z′2fyY′2fx+Z′2fxX′2Z′2fyX′Y′−Z′fxY′Z′fyX′
如果仍需优化特征点的空间位置
∂ e ∂ P = ∂ e ∂ P ′ ∂ P ′ ∂ P \frac{\partial e}{\partial P}=\frac{\partial e}{\partial P'}\frac{\partial P'}{\partial P} ∂P∂e=∂P′∂e∂P∂P′
其中 ∂ e ∂ P ′ \frac{\partial e}{\partial P'} ∂P′∂e 在上方已求出,由于 P ′ = R P + t P'=RP+t P′=RP+t ,易得 ∂ P ′ ∂ P = R \frac{\partial P'}{\partial P}=R ∂P∂P′=R
因此:
∂ e ∂ P = − f x Z ′ 0 − f x X ′ Z ′ 2 0 f y Z ′ − f y Y ′ Z ′ 2 R \frac{\partial e}{\partial P}=-\begin{bmatrix}\frac{f_x}{Z'}&0&-\frac{f_xX'}{Z'^2}\\0&\frac{f_y}{Z'}&-\frac{f_yY'}{Z'^2}\end{bmatrix}R ∂P∂e=−Z′fx00Z′fy−Z′2fxX′−Z′2fyY′R
优化算法代码实现
这里提供了大致代码的实现
高斯牛顿法:
cpp
void optimizePoseGaussNewton(const std::vector<cv::Point3d>& points_3d, const std::vector<cv::Point2d>& points_2d, cv::Mat& K, Sophus::SE3d& pose)
{
const int iterations = 10; // 最大迭代次数
double cost = 0, last_cost = 0; // 当前误差和上次迭代误差
double fx = K.at<double>(0, 0);
double fy = K.at<double>(1, 1);
double cx = K.at<double>(0, 2);
double cy = K.at<double>(1, 2);
// 构建相机内参矩阵
Eigen::Matrix3d K_eigen;
K_eigen << fx, 0, cx,
0, fy, cy,
0, 0, 1;
for (int iter = 0; iter < iterations; iter++)
{
Sophus::Matrix6d H = Sophus::Matrix6d::Zero(); // 初始化海森矩阵
Sophus::Vector6d b = Sophus::Vector6d::Zero(); // 初始化梯度
cost = 0;
// 计算雅可比矩阵和残差
for (size_t i = 0; i < points_3d.size(); i++)
{
// 将3D点转换到相机坐标系下
Eigen::Vector3d pw(points_3d[i].x, points_3d[i].y, points_3d[i].z);
Eigen::Vector3d pc = pose * pw; // P_camera = T * P_world
double X = pc[0], Y = pc[1], Z = pc[2];
// 检查深度
if (Z <= 0)
{
std::cerr << "Depth is zero or negative!" << std::endl;
continue;
}
// 投影到图像平面并计算重投影误差
Eigen::Vector3d pixel_homo = K_eigen * pc; // 齐次坐标形式
Eigen::Vector2d pixel(pixel_homo[0] / pixel_homo[2], pixel_homo[1] / pixel_homo[2]); // 转换回像素坐标
Eigen::Vector2d observerd(points_2d[i].x, points_2d[i].y);
Eigen::Vector2d error = observerd - pixel;
// 累加误差平方和
cost += error.squaredNorm();
// 计算雅可比矩阵
Eigen::Matrix<double, 2, 6> J;
J(0, 0) = fx / Z;
J(0, 1) = 0;
J(0, 2) = -fx * X / (Z * Z);
J(0, 3) = -fx * X * Y / (Z * Z);
J(0, 4) = fx + fx * X * X / (Z * Z);
J(0, 5) = -fx * Y / Z;
J(1, 0) = 0;
J(1, 1) = fy / Z;
J(1, 2) = -fy * Y / (Z * Z);
J(1, 3) = -fy - fy * Y * Y / (Z * Z);
J(1, 4) = fy * X * Y / (Z * Z);
J(1, 5) = fy * X / Z;
// 构建高斯-牛顿方程
H += J.transpose() * J;
b += -J.transpose() * error;
}
// 求解线性方程 H * dx = b
Sophus::Vector6d dx;
try
{
dx = H.ldlt().solve(b); // H 明确是对称正定矩阵,使用 LDLT 分解求解
}
catch (const std::exception& e)
{
std::cerr << "Linear system solve failed: " << e.what() << std::endl;
break;
}
// 检查解
if (!dx.allFinite())
{
std::cerr << "Solution is not finite!" << std::endl;
break;
}
// 检查收敛性
if (iter > 0 && cost >= last_cost)
{
std::cout << "Iteration " << iter << ", cost increased: " << cost << " -> " << last_cost << std::endl;
break;
}
// 更新位姿
pose = Sophus::SE3d::exp(dx) * pose;
// 更新误差
last_cost = cost;
// 输出迭代信息
std::cout << "Iteration " << iter << ", cost = " << cost << std::endl;
std::cout << "dx norm = " << dx.norm() << std::endl;
// 判断收敛
if (dx.norm() < 1e-6)
{
std::cout << "Converged in " << iter << " iterations." << std::endl;
break;
}
}
}列文伯格-马夸尔特优化法:
cpp
void optimizePoseLM(const std::vector<cv::Point3d>& points_3d, const std::vector<cv::Point2d>& points_2d, cv::Mat& K, Sophus::SE3d& pose)
{
// 前面直到计算雅可比矩阵和残差的部分与 Gauss-Newton 相同,不再重复
// 自适应阻尼
Sophus::Vector6d dx;
bool updateAccepted = false;
while (!updateAccepted)
{
try
{
// (H + lambda*I) * dx = b
Sophus::Matrix6d H_lm = H + lambda * Sophus::Matrix6d::Identity();
dx = H_lm.ldlt().solve(b);
if (!dx.allFinite())
{
throw std::runtime_error("Solution is not finite!");
}
}
catch (const std::exception& e)
{
std::cerr << "Linear system solve failed: " << e.what() << std::endl;
lambda *= 4; // 增大阻尼因子,重新尝试
continue;
}
// 尝试更新位姿
Sophus::SE3d newPose = Sophus::SE3d::exp(dx) * pose;
// 计算新的误差
double newCost = 0;
for (size_t i = 0; i < points_3d.size(); i++)
{
Eigen::Vector3d pw(points_3d[i].x, points_3d[i].y, points_3d[i].z);
Eigen::Vector3d pc = newPose * pw;
// 投影到图像平面并计算重投影误差
Eigen::Vector3d pixel_homo = K_eigen * pc;
Eigen::Vector2d pixel(pixel_homo[0] / pixel_homo[2], pixel_homo[1] / pixel_homo[2]);
Eigen::Vector2d observerd(points_2d[i].x, points_2d[i].y);
Eigen::Vector2d error = observerd - pixel;
newCost += error.squaredNorm();
}
/*
* 计算近似质量因子 ρ
* ρ = [实际误差减少量] / [理论误差减少量]
* 理论误差减少量 = -dx^T * (J^T * f + 0.5 * H * dx)
* 简化后 ≈ dx^T * (λ * dx - b) (因为 H * dx ≈ λ * dx )
*/
double modelImprovement = dx.dot(b - lambda * dx);
double actualImprovement = cost - newCost;
double rho = actualImprovement / modelImprovement;
// 根据 ρ 调整阻尼因子
if (rho > 0)
{
// 模型预测准确,接受更新
pose = newPose;
cost = newCost;
updateAccepted = true;
// 调整 λ:当模型很好时减少 λ,使模型更接近高斯-牛顿法
lambda *= std::max(1.0 / 3.0, 1 - std::pow(2 * rho - 1, 3));
lambda = std::max(lambda, 1e-6); // 防止 λ 过小
}
else
{
// 模型预测不准确,拒绝更新
lambda *= 2; // 增大阻尼因子,重新尝试
lambda = std::min(lambda, 1e5); // 防止 λ 过大
}
// 防止无限循环
if (lambda > 1e5)
{
std::cerr << "Lambda exploded! Exiting." << std::endl;
break;
}
}
// 输出迭代信息
std::cout << "Iteration " << iter << ", cost = " << cost << ", lambda = " << lambda << std::endl;
std::cout << "dx norm = " << dx.norm() << std::endl;
// 判断收敛
if (iter > 0 && cost >= last_cost - 1e-6)
{
std::cout << "Converged in " << iter << " iterations." << std::endl;
break;
}
if (dx.norm() < 1e-6)
{
std::cout << "Converged in " << iter << " iterations." << std::endl;
break;
}
// 更新误差
last_cost = cost;
}
}这里建议搭配上一章的非线性优化一起看
3D-3D:ICP
当我们观测到两组 3D 点时(通过RGB-D相机或者三角化得到),我们可以直接使用 3D-3D 匹配点来估计相机运动
已知两组匹配 3D 点:
P = { p 1 , p 2 , ... , p n } , Q = { q 1 , q 2 , ... , q n } P=\{p_1,p_2,\dots,p_n\},\quad Q=\{q_1,q_2,\dots,q_n\} P={p1,p2,...,pn},Q={q1,q2,...,qn}
构建最小二乘问题
min R , t 1 2 ∑ i = 1 n ∣ ∣ q i − ( R p i + t ) ∣ ∣ 2 \underset{R,t}{\min}\frac{1}{2}\sum_{i=1}^n||q_i-(Rp_i+t)||^2 R,tmin21i=1∑n∣∣qi−(Rpi+t)∣∣2
SVD 法求解
-
计算质心
μ p = 1 n ∑ i = 1 n p i , μ q = 1 n ∑ i = 1 n q i \mu_p=\frac{1}{n}\sum_{i=1}^np_i,\quad \mu_q=\frac{1}{n}\sum_{i=1}^nq_i μp=n1i=1∑npi,μq=n1i=1∑nqi -
去中心化
p i ′ = p i − μ p , q i ′ = q i − μ q p_i'=p_i-\mu_p,\quad q_i'=q_i-\mu_q pi′=pi−μp,qi′=qi−μq -
计算旋转矩阵
构建矩阵:
W = ∑ i = 1 n q i ′ p ′ i T W=\sum_{i=1}^nq_i'{p'}_i^T W=i=1∑nqi′p′iT进行 SVD 分解
W = U Σ V T W=U\Sigma V^T W=UΣVT则旋转矩阵可定义为
R = U V T R=UV^T R=UVT(如果 det ( R ) = − 1 \det(R)=-1 det(R)=−1 ,需要去负号修正: R = U ⋅ diag ( 1 , 1 , − 1 ) ⋅ V T R=U\cdot\text{diag}(1,1,-1)\cdot V^T R=U⋅diag(1,1,−1)⋅VT)
注:奇异值分解可以视为矩阵先进行了一次旋转 U U U ,沿着坐标轴进行缩放 Σ \Sigma Σ ,最后再进行一次旋转 V T V^T VT ,故旋转矩阵可以视为 R = U V T R=UV^T R=UVT
-
计算平移向量
t = μ q − R μ p t=\mu_q-R\mu_p t=μq−Rμp
SVD 法代码实现
cpp
Sophus::SE3d solveICPSVD(const std::vector<Eigen::Vector3d>& pt1, const std::vector<Eigen::Vector3d>& pt2)
{
// 1. 计算质心
Eigen::Vector3d centroid1(0, 0, 0);
Eigen::Vector3d centroid2(0, 0, 0);
for (const auto& p : pt1) centroid1 += p;
for (const auto& p : pt2) centroid2 += p;
centroid1 /= pt1.size();
centroid2 /= pt2.size();
// 2. 去中心化
Eigen::Matrix3d W = Eigen::Matrix3d::Zero();
for (size_t i = 0; i < pt1.size(); ++i)
{
Eigen::Vector3d p1 = pt1[i] - centroid1;
Eigen::Vector3d p2 = pt2[i] - centroid2;
W += p1 * p2.transpose();
}
// 3. SVD分解
Eigen::JacobiSVD<Eigen::Matrix3d> svd(W, Eigen::ComputeFullU | Eigen::ComputeFullV);
Eigen::Matrix3d U = svd.matrixU();
Eigen::Matrix3d V = svd.matrixV();
// 4. 计算旋转矩阵
Eigen::Matrix3d R = V * U.transpose();
// 5. 检查旋转矩阵的行列式
if (R.determinant() < 0)
{
Eigen::Matrix3d V_fixed = V;
V_fixed.col(2) *= -1; // 翻转第二列
R = V_fixed * U.transpose();
}
// 6. 计算平移向量
Eigen::Vector3d t = centroid2 - R * centroid1;
return Sophus::SE3d(R, t);
}当然也可以通过非线性优化来求解,和上面大差不差,这里就不赘述了
| 特性 | 对极几何(2D-2D) | PnP(3D-2D) | ICP(3D-3D) |
|---|---|---|---|
| 输入 | 两帧图像的2D特征匹配点 | 3D地图点+当前帧的2D检测 | 两组3D点云 |
| 输出 | 相机相对运动位姿(R、t)特征点深度 | 相机位姿(R、t) | 点云间的刚体变换(R、t) |
| 适用场景 | 单目相机SLAM初始化、双目相机 | 已知地图定位 | RGB-D相机SLAM、激光SLAM、点云配准 |
| 退化情况 | 纯旋转运动,匹配点共面、无纹理区域 | 匹配点共面、观测点噪声过高 | 点云特征不明显、初始位姿偏差过大 |
| 常用算法 | 八点法、五点法、RANSAC+八点法 | P3P、EPnP、DLT、非线性优化 | SVD、非线性优化 |