1 GRU的提出背景
GRU提出的Motivation是为了解决传统RNN(1986)中在处理实际问题时遇到的长期记忆丢失和反向传播中的++梯度消失或爆炸++ (详见【循环神经网络1】一文搞定RNN入门与详解-CSDN博客的4.4节)等问题。
相较于LSTM(1997),GRU于更晚的2014年由论文1412.3555提出,其优势在于能用更少的计算资源得到于LSTM几乎相当的效果。
GRU模型通过引入门控机制,可以更好地控制信息的流动,并有效地缓解梯度消失和梯度爆炸问题。这使得网络能够更好地捕捉到长期依赖关系,提高模型的性能和泛化能力。
2 GRU的原理与结构
2.1 重置门和更新门
GRU引入了两个最重要的门控单元:
-
重置门(reset gate)控制"可能还想记住"的过去状态的数量。
-
更新门(update gate)控制新状态中有多少个旧状态的副本。
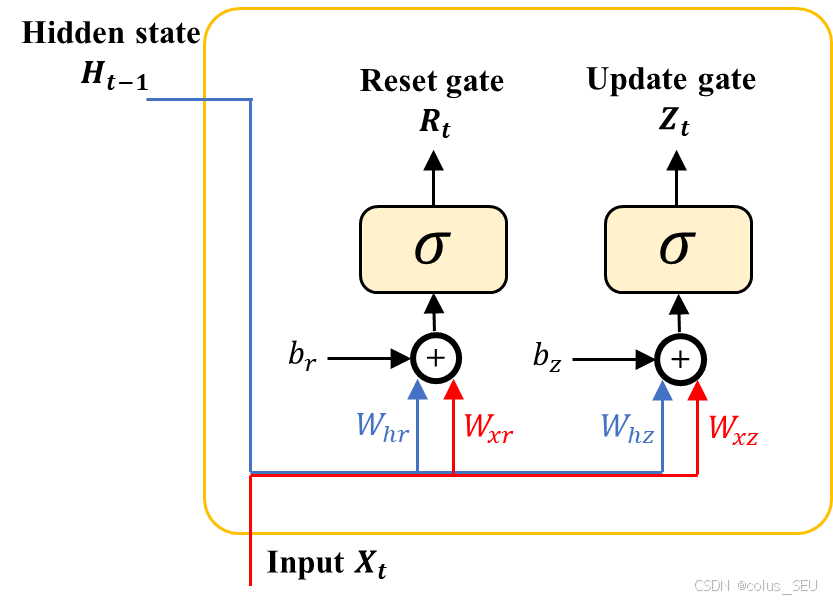
GRU 的数学有如下的形式化描述,对于给定的时间步 t,假设输入一个小批量 (其中 n 表示样本数,d 表示输入数),前一个时间步的隐状态是
(其中 h 表示隐藏单元数),则重置门
和更新门
的计算如下所示:
以上 和
的计算步骤相同,这里拿
举例:
-
用于和输入
-
-
-
然后将计算结果通过激活函数 sigmoid 将每个元素映射到 (0, 1) 区间,用来充当遗忘门控信号。
-
最后得到一个矩阵,大小不变
从上面 5 个计算步可以看出,本小结一共有六组要学习的参数:
-
重置门
-
更新门
因此,一共有 个参数要通过反向传播来更新。
2.2 候选隐状态
目前为止,我们得到了重置门 ,更新门
的计算结果,但对于要更新的隐状态是如何计算的还没进行描述。在GRU中,通常先通过
计算得到一个候选隐状态
,然后用
来决定更新的程度。
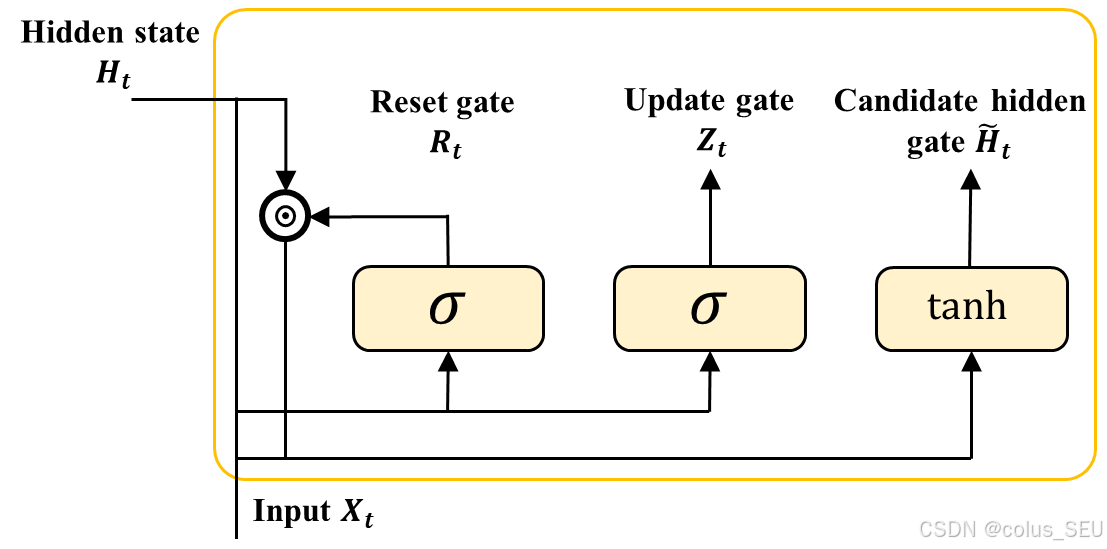
下面阐述候选隐状态的详细计算过程:
-
将重置信号
-
然后用
-
同时用
-
最后,得到在时间步 t 的候选隐状态矩阵
其中符号 表示哈达玛积运算符。这里,使用
来确保候选隐状态矩阵
中 element-wise 值映射到区间 (-1, 1) 内。
小结,从上面4个计算步可以看出,本小结一共有3组要学习的参数,分别是 ,参数个数分别为
,
和
。因此,一共有
个参数要通过反向传播来更新。
注:哈达玛积的符号问题。
细心的读者可能会注意到笔者在LSTM中对哈达玛积使用的是
- 在正式数学写作中 ,推荐使用
- 在机器学习/深度学习论文中,\odot 非常流行(例如在 LSTM、注意力机制中常见):
总的来说,使用
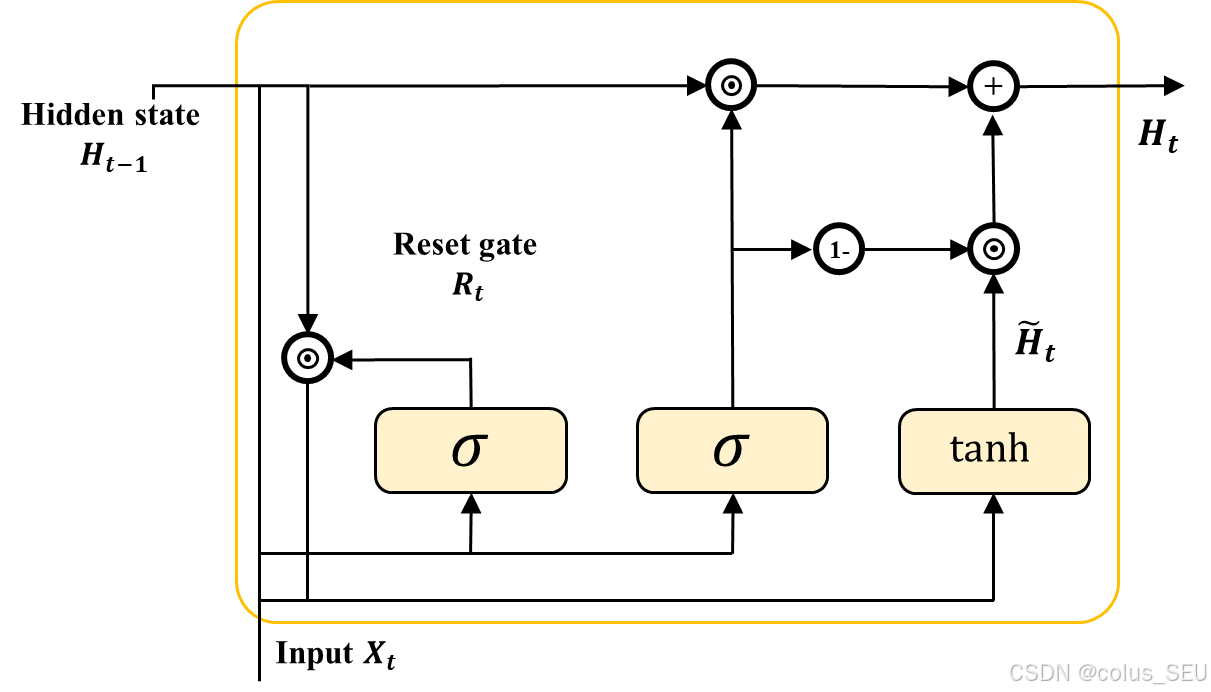
2.3 隐状态更新
有了重置门 ,更新门
的计算结果,以及一个候选隐状态
,一切准备就绪后,接下来我们对进行更新操作。
通过上面的运算,我们得到了一个候选隐状态 ,现在要做的是结合更新门
来最终确定时间步 t 的隐状态在多大程度上由
和新得到的
决定。刚才我们把
的每个元素都限定在了 (0, 1) 区间,此时可以做一凸组合,就像 DDPG 中的软更新一样,只不过这个控制参数
是可学习的。因此,对于当前时间步的隐状态
,可由下式计算:
从该式可以看出,当 趋于 0 时,新的隐状态
几乎来自于
。不过需要思考一下这样设计的理由。假如所有时间步的更新门
都接近 1,则无论是多长的序列数据,距离当前时刻最久远的隐状态都能很好的保留到后续的计算中。To this end,我们得到一个完成 GRU 单元计算流,如下图所示(简化起见,省略了待学习参数矩阵乘法的标注)。
2.4 最终输出
与 RNN 相同的是,得到了当前时间步的隐状态,我们要将其映射到下游任务需要的特征维度,因此引入矩阵 和向量
用于最后的线性层映射,其中输出的特征维度为
。以上计算可由 (4) 表示
重置门有助于提取序列中的短期依赖关系,更新门有助于获取序列数据的长期依赖关系。
3 GRU与LSTM的对比
-
结构复杂度:
-
GRU 的结构相对 LSTM 更简单,它只有两个门控机制和一个隐藏状态,
-
而 LSTM 有三个门控机制(输入门、遗忘门、输出门)和一个单元状态,
-
因此 GRU 的计算量相对较小,训练速度更快。
-
-
性能表现:
-
在大多数情况下,GRU 和 LSTM 都能很好地处理序列数据中的长期依赖问题,
-
但在某些任务中,GRU 可能因为结构简单而表现稍逊一筹,
-
而在另一些对计算资源要求较高或数据量较小的场景下,GRU 可能更具优势。
-