目录
[1 作用](#1 作用)
[2 参数及含义](#2 参数及含义)
[3 代码](#3 代码)
[4 解析](#4 解析)
[4.1 创建关键帧](#4.1 创建关键帧)
[4.2 计算词袋](#4.2 计算词袋)
[4.2.1 Frame::ComputeBoW()](#4.2.1 Frame::ComputeBoW())
[4.2.2 KeyFrame::ComputeBoW()](#4.2.2 KeyFrame::ComputeBoW())
[4.3 插入关键帧到地图](#4.3 插入关键帧到地图)
[4.4 创建初始MapPoints](#4.4 创建初始MapPoints)
[4.5 建立关键帧与地图点的双向关系](#4.5 建立关键帧与地图点的双向关系)
[4.6 优化MapPoint属性](#4.6 优化MapPoint属性)
[4.7 在当前帧中更新关联关系](#4.7 在当前帧中更新关联关系)
[4.8 更新关键帧之间连接](#4.8 更新关键帧之间连接)
[4.8.1 UpdateConnections() 函数](#4.8.1 UpdateConnections() 函数)
[4.9 全局BA](#4.9 全局BA)
[4.9.1GlobalBundleAdjustemnt() 函数](#4.9.1GlobalBundleAdjustemnt() 函数)
[4.10 设置尺度](#4.10 设置尺度)
[4.10.1 ComputeSceneMedianDepth() 函数](#4.10.1 ComputeSceneMedianDepth() 函数)
[4.11 更新地图解结构与状态](#4.11 更新地图解结构与状态)
[4.11.1 GetMapPointMatches](#4.11.1 GetMapPointMatches)
[4.11.2 InsertKeyFrame() 函数](#4.11.2 InsertKeyFrame() 函数)
1 作用
在单目 SLAM 初始化完成后(即估计出了两帧之间的姿态 R、t 和三维点mvIniP3D),
该函数作用:
(1)创建两个关键帧(初始帧 + 当前帧);
(2)用匹配关系创建初始地图点;
(3)建立关键帧之间的观测关系;
(4)执行一次全局 BA(Bundle Adjustment)优化;
(5)规范化尺度(因为单目无法直接估计绝对尺度);
(6)将地图数据交给 LocalMapping 线程进行后续优化。
2 参数及含义

3 代码
void Tracking::CreateInitialMapMonocular() { // Create KeyFrames KeyFrame* pKFini = new KeyFrame(mInitialFrame,mpMap,mpKeyFrameDB); KeyFrame* pKFcur = new KeyFrame(mCurrentFrame,mpMap,mpKeyFrameDB); pKFini->ComputeBoW(); pKFcur->ComputeBoW(); // Insert KFs in the map mpMap->AddKeyFrame(pKFini); mpMap->AddKeyFrame(pKFcur); // Create MapPoints and asscoiate to keyframes for(size_t i=0; i<mvIniMatches.size();i++) { if(mvIniMatches[i]<0) continue; //Create MapPoint. cv::Mat worldPos(mvIniP3D[i]); MapPoint* pMP = new MapPoint(worldPos,pKFcur,mpMap); pKFini->AddMapPoint(pMP,i); pKFcur->AddMapPoint(pMP,mvIniMatches[i]); pMP->AddObservation(pKFini,i); pMP->AddObservation(pKFcur,mvIniMatches[i]); pMP->ComputeDistinctiveDescriptors(); pMP->UpdateNormalAndDepth(); //Fill Current Frame structure mCurrentFrame.mvpMapPoints[mvIniMatches[i]] = pMP; mCurrentFrame.mvbOutlier[mvIniMatches[i]] = false; //Add to Map mpMap->AddMapPoint(pMP); } // Update Connections pKFini->UpdateConnections(); pKFcur->UpdateConnections(); // Bundle Adjustment cout << "New Map created with " << mpMap->MapPointsInMap() << " points" << endl; Optimizer::GlobalBundleAdjustemnt(mpMap,20); // Set median depth to 1 float medianDepth = pKFini->ComputeSceneMedianDepth(2); float invMedianDepth = 1.0f/medianDepth; if(medianDepth<0 || pKFcur->TrackedMapPoints(1)<100) { cout << "Wrong initialization, reseting..." << endl; Reset(); return; } // Scale initial baseline cv::Mat Tc2w = pKFcur->GetPose(); Tc2w.col(3).rowRange(0,3) = Tc2w.col(3).rowRange(0,3)*invMedianDepth; pKFcur->SetPose(Tc2w); // Scale points vector<MapPoint*> vpAllMapPoints = pKFini->GetMapPointMatches(); for(size_t iMP=0; iMP<vpAllMapPoints.size(); iMP++) { if(vpAllMapPoints[iMP]) { MapPoint* pMP = vpAllMapPoints[iMP]; pMP->SetWorldPos(pMP->GetWorldPos()*invMedianDepth); } } mpLocalMapper->InsertKeyFrame(pKFini); mpLocalMapper->InsertKeyFrame(pKFcur); mCurrentFrame.SetPose(pKFcur->GetPose()); mnLastKeyFrameId=mCurrentFrame.mnId; mpLastKeyFrame = pKFcur; mvpLocalKeyFrames.push_back(pKFcur); mvpLocalKeyFrames.push_back(pKFini); mvpLocalMapPoints=mpMap->GetAllMapPoints(); mpReferenceKF = pKFcur; mCurrentFrame.mpReferenceKF = pKFcur; mLastFrame = Frame(mCurrentFrame); mpMap->SetReferenceMapPoints(mvpLocalMapPoints); mpMapDrawer->SetCurrentCameraPose(pKFcur->GetPose()); mpMap->mvpKeyFrameOrigins.push_back(pKFini); mState=OK; }
4 解析
4.1 创建关键帧
// Create KeyFrames KeyFrame* pKFini = new KeyFrame(mInitialFrame,mpMap,mpKeyFrameDB); KeyFrame* pKFcur = new KeyFrame(mCurrentFrame,mpMap,mpKeyFrameDB);
4.2 计算词袋
pKFini->ComputeBoW(); pKFcur->ComputeBoW();这边词袋计算调用的是KeyFrame.cc,关键帧词袋运算。
4.2.1 Frame::ComputeBoW()
(1)声明:Frame.h
// Compute Bag of Words representation. void ComputeBoW();(2)定义:Frame.cc
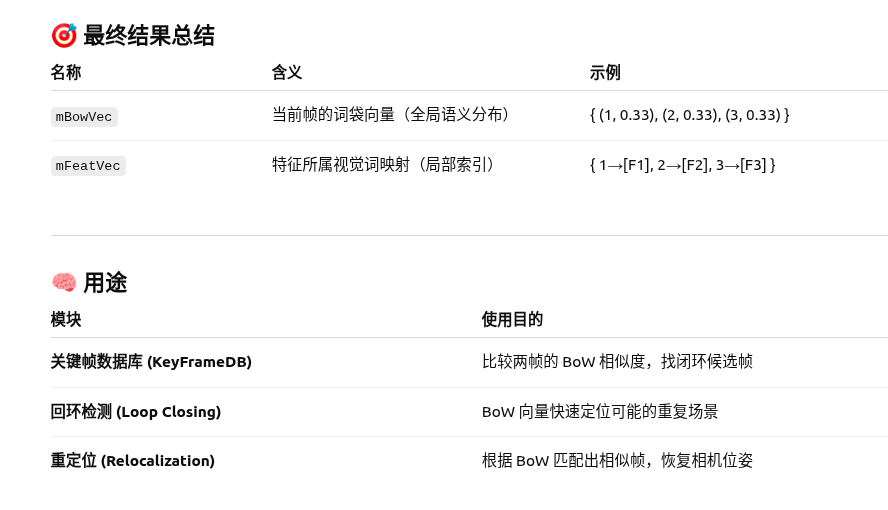
void Frame::ComputeBoW() { if(mBowVec.empty()) { vector<cv::Mat> vCurrentDesc = Converter::toDescriptorVector(mDescriptors); mpORBvocabulary->transform(vCurrentDesc,mBowVec,mFeatVec,4); } }(3)举例




4.2.2 KeyFrame::ComputeBoW()
(1)声明:KeyFrame.h
// Bag of Words Representation void ComputeBoW();(2)定义:KeyFrame.cc
void KeyFrame::ComputeBoW() { if(mBowVec.empty() || mFeatVec.empty()) { vector<cv::Mat> vCurrentDesc = Converter::toDescriptorVector(mDescriptors); // Feature vector associate features with nodes in the 4th level (from leaves up) // We assume the vocabulary tree has 6 levels, change the 4 otherwise mpORBvocabulary->transform(vCurrentDesc,mBowVec,mFeatVec,4); } }PS.KeyFrame::ComputeBoW() 计算结果用于插入关键帧、回环检测时,存入关键帧数据库DB;Frame::ComputeBoW() 计算结果用于初始化、更踪中,结果不存入地图。
4.3 插入关键帧到地图
// Insert KFs in the map mpMap->AddKeyFrame(pKFini); mpMap->AddKeyFrame(pKFcur);
4.4 创建初始MapPoints
// Create MapPoints and asscoiate to keyframes for(size_t i=0; i<mvIniMatches.size();i++) { if(mvIniMatches[i]<0) continue; //Create MapPoint. cv::Mat worldPos(mvIniP3D[i]); MapPoint* pMP = new MapPoint(worldPos,pKFcur,mpMap);
4.5 建立关键帧与地图点的双向关系
//初始关键帧的第 i 个关键点,对应的是地图点 pMP pKFini->AddMapPoint(pMP,i); //当前帧的第 mvIniMatches[i] 个关键点,也对应这个同一个 3D 地图点 pKFcur->AddMapPoint(pMP,mvIniMatches[i]); //这个地图点 pMP 在关键帧 pKFini 中被第 i 个特征点观测到了 pMP->AddObservation(pKFini,i); //这个地图点 pMP 在当前帧 pKFcur 中被第 mvIniMatches[i] 个特征点观测到了 pMP->AddObservation(pKFcur,mvIniMatches[i]);
4.6 优化MapPoint属性
//给这个地图点计算一个 "代表性 ORB 描述符" pMP->ComputeDistinctiveDescriptors(); pMP->UpdateNormalAndDepth();(1)ComputeDistinctiveDescriptors() 函数详见:
https://blog.csdn.net/weixin_45728280/article/details/152320324?spm=1001.2014.3001.5501
(2)UpdateNormalAndDepth() 函数详见:
https://blog.csdn.net/weixin_45728280/article/details/152320646?spm=1001.2014.3001.5501
4.7 在当前帧中更新关联关系
//Fill Current Frame structure mCurrentFrame.mvpMapPoints[mvIniMatches[i]] = pMP; //当前帧各个点都不是异常点,后续重投影误差较大时会被标记为True,即外点 mCurrentFrame.mvbOutlier[mvIniMatches[i]] = false; //Add to Map //把刚生成的 MapPoint 加入到全局地图 (Map) 中的地图点容器 mpMap->AddMapPoint(pMP); }
4.8 更新关键帧之间连接
// Update Connections //根据当前关键帧与其他关键帧之间共同观测到的MapPoints数量,建立关键帧间的连接关系 //关键帧共视图、最小生成树、关键帧连接权重 pKFini->UpdateConnections(); pKFcur->UpdateConnections();
4.8.1 UpdateConnections() 函数
(1)声明:KeyFrame.h
void UpdateConnections();(2)定义:KeyFrame.cc
void KeyFrame::UpdateConnections() { map<KeyFrame*,int> KFcounter; vector<MapPoint*> vpMP; { unique_lock<mutex> lockMPs(mMutexFeatures); vpMP = mvpMapPoints; } //For all map points in keyframe check in which other keyframes are they seen //Increase counter for those keyframes for(vector<MapPoint*>::iterator vit=vpMP.begin(), vend=vpMP.end(); vit!=vend; vit++) { MapPoint* pMP = *vit; if(!pMP) continue; if(pMP->isBad()) continue; map<KeyFrame*,size_t> observations = pMP->GetObservations(); for(map<KeyFrame*,size_t>::iterator mit=observations.begin(), mend=observations.end(); mit!=mend; mit++) { if(mit->first->mnId==mnId) continue; KFcounter[mit->first]++; } } // This should not happen if(KFcounter.empty()) return; //If the counter is greater than threshold add connection //In case no keyframe counter is over threshold add the one with maximum counter int nmax=0; KeyFrame* pKFmax=NULL; int th = 15; vector<pair<int,KeyFrame*> > vPairs; vPairs.reserve(KFcounter.size()); for(map<KeyFrame*,int>::iterator mit=KFcounter.begin(), mend=KFcounter.end(); mit!=mend; mit++) { if(mit->second>nmax) { nmax=mit->second; pKFmax=mit->first; } if(mit->second>=th) { vPairs.push_back(make_pair(mit->second,mit->first)); (mit->first)->AddConnection(this,mit->second); } } if(vPairs.empty()) { vPairs.push_back(make_pair(nmax,pKFmax)); pKFmax->AddConnection(this,nmax); } sort(vPairs.begin(),vPairs.end()); list<KeyFrame*> lKFs; list<int> lWs; for(size_t i=0; i<vPairs.size();i++) { lKFs.push_front(vPairs[i].second); lWs.push_front(vPairs[i].first); } { unique_lock<mutex> lockCon(mMutexConnections); // mspConnectedKeyFrames = spConnectedKeyFrames; mConnectedKeyFrameWeights = KFcounter; mvpOrderedConnectedKeyFrames = vector<KeyFrame*>(lKFs.begin(),lKFs.end()); mvOrderedWeights = vector<int>(lWs.begin(), lWs.end()); if(mbFirstConnection && mnId!=0) { mpParent = mvpOrderedConnectedKeyFrames.front(); mpParent->AddChild(this); mbFirstConnection = false; } } }
4.9 全局BA
// Bundle Adjustment //输出:New Map created with XXX points cout << "New Map created with " << mpMap->MapPointsInMap() << " points" << endl; Optimizer::GlobalBundleAdjustemnt(mpMap,20);
4.9.1GlobalBundleAdjustemnt() 函数
(1)声明:
void static GlobalBundleAdjustemnt(Map* pMap, int nIterations=5, bool *pbStopFlag=NULL, const unsigned long nLoopKF=0, const bool bRobust = true);(2)定义:
void Optimizer::GlobalBundleAdjustemnt(Map* pMap, int nIterations, bool* pbStopFlag, const unsigned long nLoopKF, const bool bRobust) { vector<KeyFrame*> vpKFs = pMap->GetAllKeyFrames(); vector<MapPoint*> vpMP = pMap->GetAllMapPoints(); BundleAdjustment(vpKFs,vpMP,nIterations,pbStopFlag, nLoopKF, bRobust); } void Optimizer::BundleAdjustment(const vector<KeyFrame *> &vpKFs, const vector<MapPoint *> &vpMP, int nIterations, bool* pbStopFlag, const unsigned long nLoopKF, const bool bRobust) { vector<bool> vbNotIncludedMP; vbNotIncludedMP.resize(vpMP.size()); g2o::SparseOptimizer optimizer; g2o::BlockSolver_6_3::LinearSolverType * linearSolver; linearSolver = new g2o::LinearSolverEigen<g2o::BlockSolver_6_3::PoseMatrixType>(); g2o::BlockSolver_6_3 * solver_ptr = new g2o::BlockSolver_6_3(linearSolver); g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg(solver_ptr); optimizer.setAlgorithm(solver); if(pbStopFlag) optimizer.setForceStopFlag(pbStopFlag); long unsigned int maxKFid = 0; // Set KeyFrame vertices for(size_t i=0; i<vpKFs.size(); i++) { KeyFrame* pKF = vpKFs[i]; if(pKF->isBad()) continue; g2o::VertexSE3Expmap * vSE3 = new g2o::VertexSE3Expmap(); vSE3->setEstimate(Converter::toSE3Quat(pKF->GetPose())); vSE3->setId(pKF->mnId); vSE3->setFixed(pKF->mnId==0); optimizer.addVertex(vSE3); if(pKF->mnId>maxKFid) maxKFid=pKF->mnId; } const float thHuber2D = sqrt(5.99); const float thHuber3D = sqrt(7.815); // Set MapPoint vertices for(size_t i=0; i<vpMP.size(); i++) { MapPoint* pMP = vpMP[i]; if(pMP->isBad()) continue; g2o::VertexSBAPointXYZ* vPoint = new g2o::VertexSBAPointXYZ(); vPoint->setEstimate(Converter::toVector3d(pMP->GetWorldPos())); const int id = pMP->mnId+maxKFid+1; vPoint->setId(id); vPoint->setMarginalized(true); optimizer.addVertex(vPoint); const map<KeyFrame*,size_t> observations = pMP->GetObservations(); int nEdges = 0; //SET EDGES for(map<KeyFrame*,size_t>::const_iterator mit=observations.begin(); mit!=observations.end(); mit++) { KeyFrame* pKF = mit->first; if(pKF->isBad() || pKF->mnId>maxKFid) continue; nEdges++; const cv::KeyPoint &kpUn = pKF->mvKeysUn[mit->second]; if(pKF->mvuRight[mit->second]<0) { Eigen::Matrix<double,2,1> obs; obs << kpUn.pt.x, kpUn.pt.y; g2o::EdgeSE3ProjectXYZ* e = new g2o::EdgeSE3ProjectXYZ(); e->setVertex(0, dynamic_cast<g2o::OptimizableGraph::Vertex*>(optimizer.vertex(id))); e->setVertex(1, dynamic_cast<g2o::OptimizableGraph::Vertex*>(optimizer.vertex(pKF->mnId))); e->setMeasurement(obs); const float &invSigma2 = pKF->mvInvLevelSigma2[kpUn.octave]; e->setInformation(Eigen::Matrix2d::Identity()*invSigma2); if(bRobust) { g2o::RobustKernelHuber* rk = new g2o::RobustKernelHuber; e->setRobustKernel(rk); rk->setDelta(thHuber2D); } e->fx = pKF->fx; e->fy = pKF->fy; e->cx = pKF->cx; e->cy = pKF->cy; optimizer.addEdge(e); } else { Eigen::Matrix<double,3,1> obs; const float kp_ur = pKF->mvuRight[mit->second]; obs << kpUn.pt.x, kpUn.pt.y, kp_ur; g2o::EdgeStereoSE3ProjectXYZ* e = new g2o::EdgeStereoSE3ProjectXYZ(); e->setVertex(0, dynamic_cast<g2o::OptimizableGraph::Vertex*>(optimizer.vertex(id))); e->setVertex(1, dynamic_cast<g2o::OptimizableGraph::Vertex*>(optimizer.vertex(pKF->mnId))); e->setMeasurement(obs); const float &invSigma2 = pKF->mvInvLevelSigma2[kpUn.octave]; Eigen::Matrix3d Info = Eigen::Matrix3d::Identity()*invSigma2; e->setInformation(Info); if(bRobust) { g2o::RobustKernelHuber* rk = new g2o::RobustKernelHuber; e->setRobustKernel(rk); rk->setDelta(thHuber3D); } e->fx = pKF->fx; e->fy = pKF->fy; e->cx = pKF->cx; e->cy = pKF->cy; e->bf = pKF->mbf; optimizer.addEdge(e); } } if(nEdges==0) { optimizer.removeVertex(vPoint); vbNotIncludedMP[i]=true; } else { vbNotIncludedMP[i]=false; } } // Optimize! optimizer.initializeOptimization(); optimizer.optimize(nIterations); // Recover optimized data //Keyframes for(size_t i=0; i<vpKFs.size(); i++) { KeyFrame* pKF = vpKFs[i]; if(pKF->isBad()) continue; g2o::VertexSE3Expmap* vSE3 = static_cast<g2o::VertexSE3Expmap*>(optimizer.vertex(pKF->mnId)); g2o::SE3Quat SE3quat = vSE3->estimate(); if(nLoopKF==0) { pKF->SetPose(Converter::toCvMat(SE3quat)); } else { pKF->mTcwGBA.create(4,4,CV_32F); Converter::toCvMat(SE3quat).copyTo(pKF->mTcwGBA); pKF->mnBAGlobalForKF = nLoopKF; } } //Points for(size_t i=0; i<vpMP.size(); i++) { if(vbNotIncludedMP[i]) continue; MapPoint* pMP = vpMP[i]; if(pMP->isBad()) continue; g2o::VertexSBAPointXYZ* vPoint = static_cast<g2o::VertexSBAPointXYZ*>(optimizer.vertex(pMP->mnId+maxKFid+1)); if(nLoopKF==0) { pMP->SetWorldPos(Converter::toCvMat(vPoint->estimate())); pMP->UpdateNormalAndDepth(); } else { pMP->mPosGBA.create(3,1,CV_32F); Converter::toCvMat(vPoint->estimate()).copyTo(pMP->mPosGBA); pMP->mnBAGlobalForKF = nLoopKF; } } }(1)BA优化中,相机位姿顶点是世界坐标系下
,初值用 PnP / 本质矩阵 / 深度得到;地图顶点是世界坐标系下的三维点
(2)BA优化中投影误差计算如下:
深度问题在使用RGB-D的时候可以解决,也就不用这种误差测算;单目的时候因为没有深度值,需要根据像素坐标进行三角化得到世界坐标,但这个世界坐标是估计值,所以需要重投影到像素坐标下与实际的像素坐标进行最小化。

4.10 设置尺度
// Set median depth to 1 float medianDepth = pKFini->ComputeSceneMedianDepth(2); float invMedianDepth = 1.0f/medianDepth;
4.10.1 ComputeSceneMedianDepth() 函数
(1)声明:KeyFrame.h
// Compute Scene Depth (q=2 median). Used in monocular. float ComputeSceneMedianDepth(const int q);(2)定义:KeyFrame.cc
float KeyFrame::ComputeSceneMedianDepth(const int q) { vector<MapPoint*> vpMapPoints; cv::Mat Tcw_; { unique_lock<mutex> lock(mMutexFeatures); unique_lock<mutex> lock2(mMutexPose); vpMapPoints = mvpMapPoints; Tcw_ = Tcw.clone(); } vector<float> vDepths; vDepths.reserve(N); cv::Mat Rcw2 = Tcw_.row(2).colRange(0,3); Rcw2 = Rcw2.t(); float zcw = Tcw_.at<float>(2,3); for(int i=0; i<N; i++) { if(mvpMapPoints[i]) { MapPoint* pMP = mvpMapPoints[i]; cv::Mat x3Dw = pMP->GetWorldPos(); float z = Rcw2.dot(x3Dw)+zcw; vDepths.push_back(z); } } sort(vDepths.begin(),vDepths.end()); return vDepths[(vDepths.size()-1)/q]; }
4.11 更新地图解结构与状态
if(medianDepth<0 || pKFcur->TrackedMapPoints(1)<100) { cout << "Wrong initialization, reseting..." << endl; Reset(); return; } // Scale initial baseline,对平移进行归一化,旋转不用 cv::Mat Tc2w = pKFcur->GetPose(); Tc2w.col(3).rowRange(0,3) = Tc2w.col(3).rowRange(0,3)*invMedianDepth; pKFcur->SetPose(Tc2w); // Scale points vector<MapPoint*> vpAllMapPoints = pKFini->GetMapPointMatches(); for(size_t iMP=0; iMP<vpAllMapPoints.size(); iMP++) { if(vpAllMapPoints[iMP]) { MapPoint* pMP = vpAllMapPoints[iMP]; //将三维点进行归一化 pMP->SetWorldPos(pMP->GetWorldPos()*invMedianDepth); } } mpLocalMapper->InsertKeyFrame(pKFini); mpLocalMapper->InsertKeyFrame(pKFcur); mCurrentFrame.SetPose(pKFcur->GetPose()); mnLastKeyFrameId=mCurrentFrame.mnId; mpLastKeyFrame = pKFcur; mvpLocalKeyFrames.push_back(pKFcur); mvpLocalKeyFrames.push_back(pKFini); mvpLocalMapPoints=mpMap->GetAllMapPoints(); mpReferenceKF = pKFcur; mCurrentFrame.mpReferenceKF = pKFcur; mLastFrame = Frame(mCurrentFrame); mpMap->SetReferenceMapPoints(mvpLocalMapPoints); mpMapDrawer->SetCurrentCameraPose(pKFcur->GetPose()); mpMap->mvpKeyFrameOrigins.push_back(pKFini); //表示初始化完成,可以开始正常跟踪和建图 mState=OK; }
4.11.1 GetMapPointMatches
(1)声明:
std::vector<MapPoint*> GetMapPointMatches();(2)定义:
vector<MapPoint*> KeyFrame::GetMapPointMatches() { unique_lock<mutex> lock(mMutexFeatures); return mvpMapPoints; }
4.11.2 InsertKeyFrame() 函数
详见:
https://blog.csdn.net/weixin_45728280/article/details/152416212?spm=1001.2014.3001.5501