1.转灰度图
2.高斯平滑
3.边缘检测
4.查找轮廓
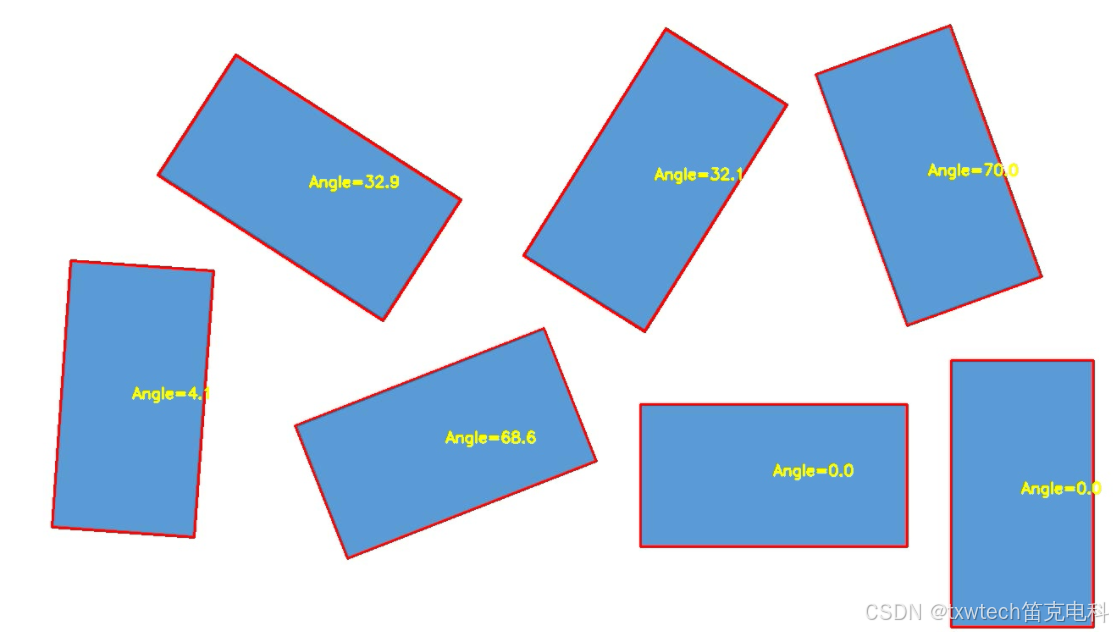
5.遍历矩形轮廓
6.计算最小外接矩形的角度获取
c#
RotatedRect minRect = Cv2.MinAreaRect(contour);
通过以上步骤后获得了图像中的矩形框信息
double angle = minRect.Angle;//获取角度
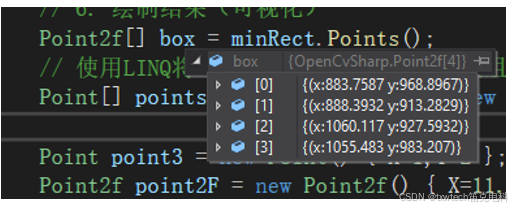
Point2f\[\] box = minRect.Points();//获取四个坐标点,p0,p1,p2,p3,根据实际坐标值进行分析
如何确定图中各个矩形的p0,p1,p2,p3
RotatedRect 存储的4个点在矩形中是顺时针排列的
RotatedRect 的Angle值范围 0<=Angle<=90,0,90
左上角XY连接点是图像的原点
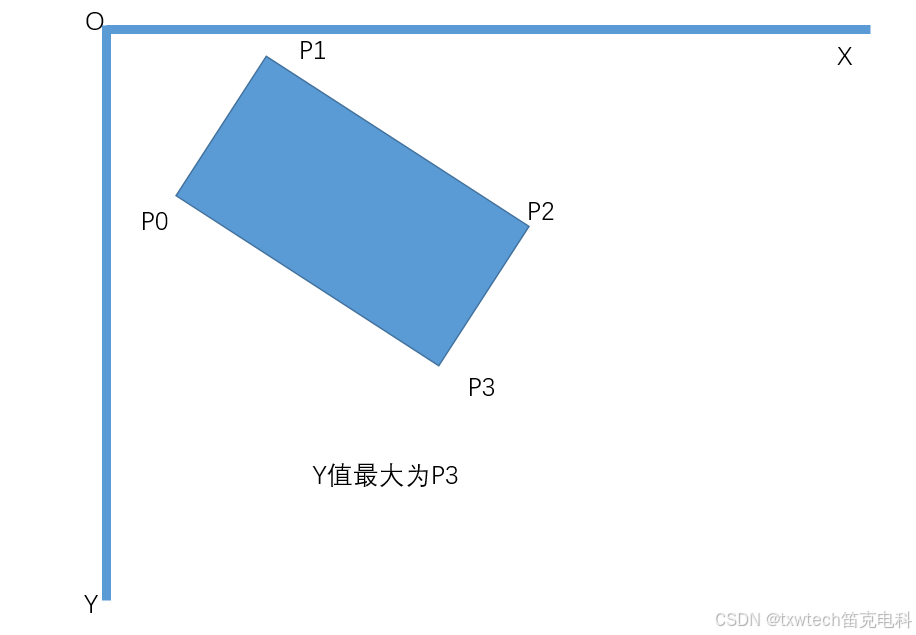
矩形的旋转角度是P0与P3连接线与X轴形成的夹角
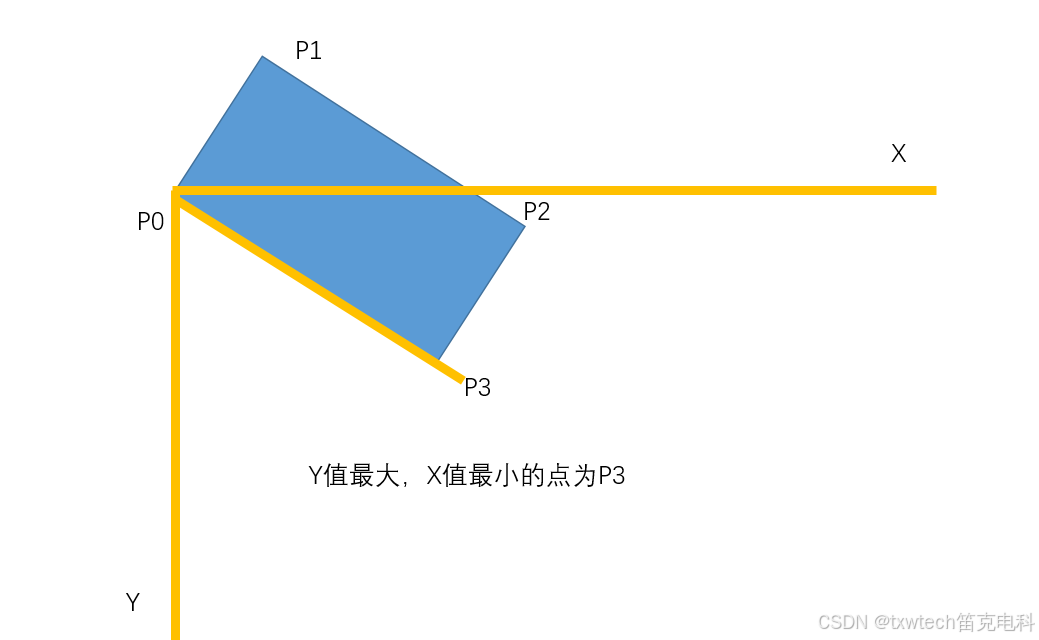
角度为0无需旋转,矩形是水平方向,则无需关心p3点
如果需要长边或者短边作为水平方向时,可左下角定义p0,右下角p3,进行计算p0,p3与p0,p1两点的距离进行判断
公式:
distance = sqrt((x2 - x1)^2 + (y2 - y1)^2)
Point2f[] box = minRect.Points();
float box_max_side2 = 0.0f;
double dis1 = Math.Sqrt( Math.Pow((box[1].X - box[0].X),2)+ Math.Pow((box[1].Y - box[0].Y), 2));
double dis2 = Math.Sqrt(Math.Pow((box[2].X - box[1].X), 2) + Math.Pow((box[2].Y - box[1].Y), 2));参考: