前提:已经成功安装docker
(一)鱼香ros一键安装docker
bash
wget http://fishros.com/install -O fishros && . fishros选择数字8安装docker,安装好后再输入上面的一键安装命令,按数字17选择docker代理,选择2服务模式,输入网址:
bash
https://docker.xuanyuan.me/安装完成后:
bash
docker --version #查询版本
sudo usermod -aG docker $USER # 将用户 hdr 加入 docker 组
newgrp docker # 立即激活组权限变更(无需重启系统)(二)安装docker后先换源
bash
cd /etc/docker
sudo nano daemon.json输入国内docker hub地址
bash
{
"registry-mirrors": [
"https://docker.xuanyuan.me",
"https://docker.1ms.run",
"https://docker.m.daocloud.io",
"https://mirror.baidubce.com",
"https://docker.mirrors.ustc.edu.cn",
"https://docker.nju.edu.cn"
]
}修改/etc/resolv.conf
bash
nameserver 114.114.114.114
nameserver 8.8.8.8保存之后在终端运行命令生效修改
bash
sudo systemctl daemon-reload
sudo systemctl restart docker测试
bash
docker info | grep -A1 "Registry Mirrors" #验证镜像加速器成功生效
docker run hello-world # 测试非 root 权限运行容器
(三)拉取ros2镜像
bash
docker pull ros:humble-desktop出现错误!!网络请求超时

排查方案:
- DNS正确
- 使用curl测试https连接

!!网络被封锁,使用镜像源或代理
镜像源加速器配置正常,镜像源配置正常,但docker pull依旧失败。
终解决方案:
重新配置镜像源:
bash
{
"runtimes": {
"nvidia": {
"args": [],
"path": "nvidia-container-runtime"
}
},
"registry-mirrors": [
"https://docker.registry.cyou",
"https://docker-cf.registry.cyou",
"https://dockercf.jsdelivr.fyi",
"https://docker.jsdelivr.fyi",
"https://dockertest.jsdelivr.fyi",
"https://mirror.aliyuncs.com",
"https://dockerproxy.com",
"https://mirror.baidubce.com",
"https://docker.m.daocloud.io",
"https://docker.nju.edu.cn",
"https://docker.mirrors.sjtug.sjtu.edu.cn",
"https://docker.mirrors.ustc.edu.cn",
"https://mirror.iscas.ac.cn",
"https://docker.rainbond.cc"
]
}重新加载
bash
sudo systemctl daemon-reload && sudo systemctl restart docker重新执行fishros
bash
wget http://fishros.com/install -O fishros && . fishros选择一键安装ros docker版,选择需要安装的ros版本
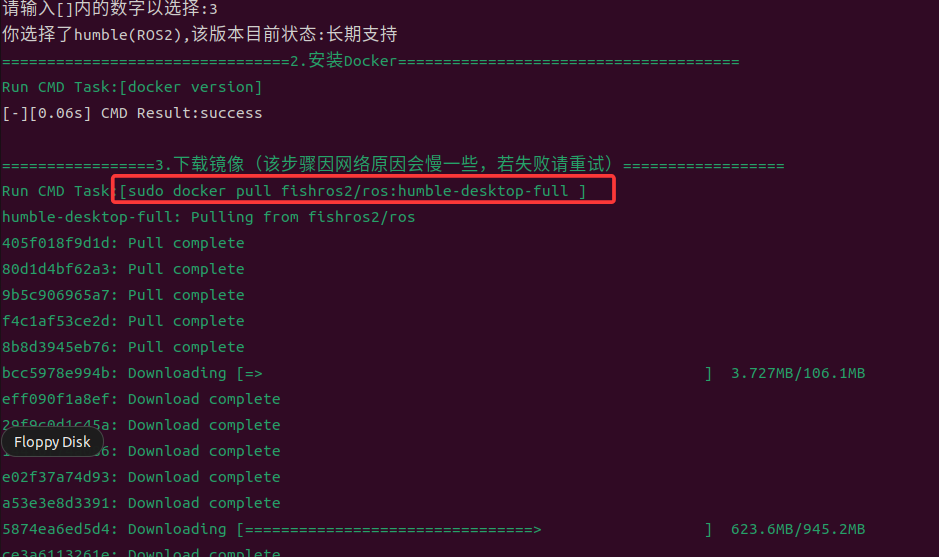
安装完成后,启动
bash
docker ps -a #查看容器
docker_ros
#运行完上述命令如果显示conntain is not running,则运行下面的命令后再执行该命令
docker start docker_ros #启动容器进入后配置环境变量并验证安装
bash
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc # 永久生效
source ~/.bashrc # 立即加载环境
ros2 run turtlesim turtlesim_node #ROS2最最熟悉的小海龟,出现即成功非常好!从此以后我就是鱼香ros最忠诚的拥护者!