目录
一、前言
本方案使用于医疗设备X射线穿透,探测器获取16位灰度图像产生的随机噪声,方法是一次获取多帧图像并求平均来消除这种随机噪声,并做简单的预处理。
图像处理的流程如下:
1、主线程中获取5张raw原图,在子线程中进行图像的处理(注意:这5张raw图是5张连续的帧,每帧的噪声是随机的,这是X射线图的特性,帧数越多,去噪效果理应越好,视情况而定)
- 当 N=1(单帧):σₙₑw=σ(无去噪效果);
- 当 N=5:σₙₑw≈σ/2.24(噪声强度降低约 55%);
- 当 N=10:σₙₑw≈σ/3.16(噪声强度降低约 68%);
- 当 N=100:σₙₑw=σ/10(噪声强度降低 90%)
2、多帧ORB对齐
3、多帧平均去噪
4、CLAHE对比度增强
5、Sobel边缘提取
6、ESPCN超分
准备工作:
1、本次项目所用到的opencv头文件需要使用cmake编译opencv_contrib拓展库
cmake版本:cmake-4.1.1-windows-x86_64
opencv版本:opencv-4.12.0-windows
opencv拓展库版本:opencv_contrib-4.12.0
cmake & opencv & opencv_contrib百度网盘下载
编译教程:有空更新
cpp
#include <opencv2/opencv.hpp> // 引入opencv头文件
#include <opencv2/dnn_superres.hpp> // 引入超分辨率头文件
#include <opencv2/features2d.hpp> // 引入特征检测头文件2、本次项目所用到的超分辨率模型为ESPCN_x4.pb模型(提供x2 x3 x4的EDSR模型文件试验)
完整项目中自带espcn_x4模型
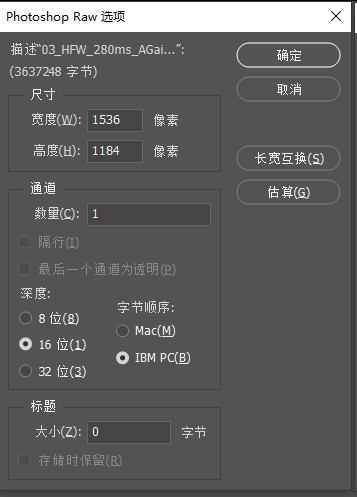
3、本次项目所用到的5张RAW原图,1536x1184,16位灰度图

图像处理效果如下:
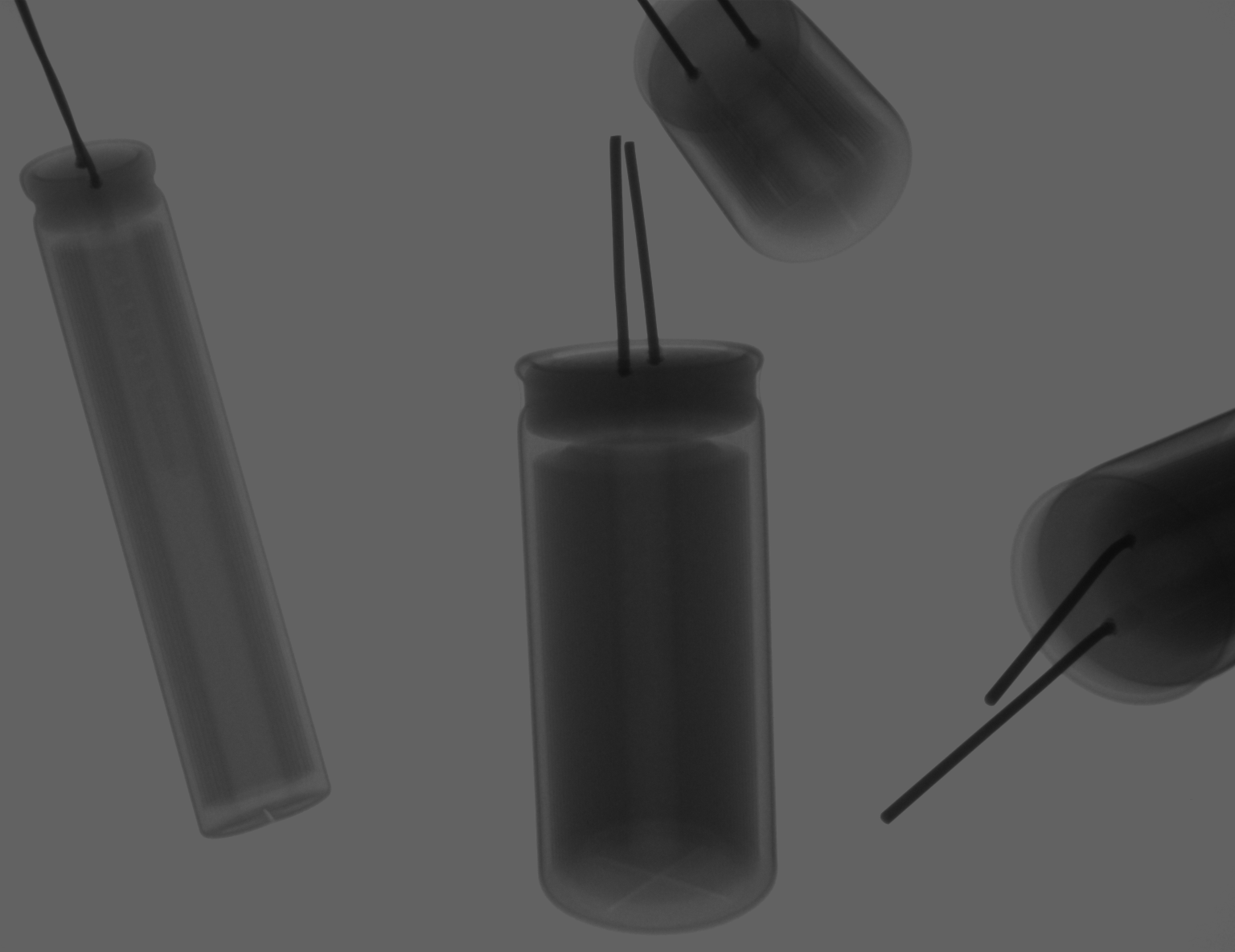
raw原图:
1_avg_result:多帧平均后

2_display_8u:归一化8位
3_clahe:对比度增强
4_Sobel:边缘提取

5_morph_grad:形态学梯度增强

6_fused:多尺度融合
7_gamma_corrected:伽马亮度增强
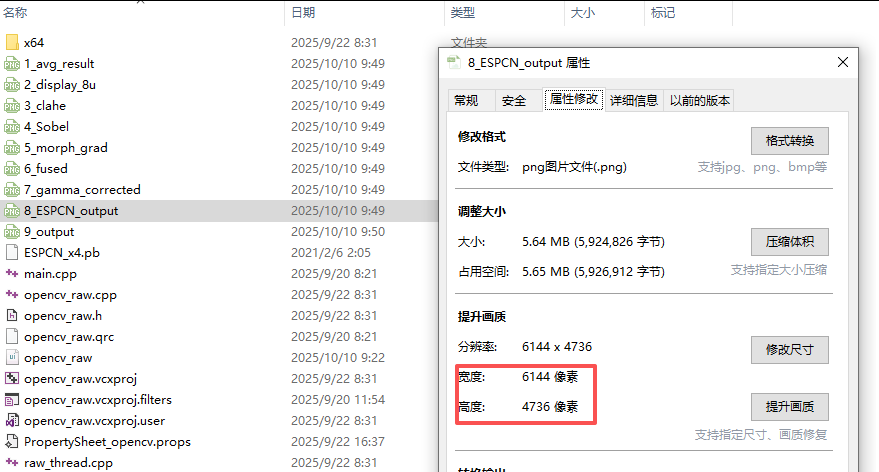
8_ESPCN_output:超分辨率
二、代码详解
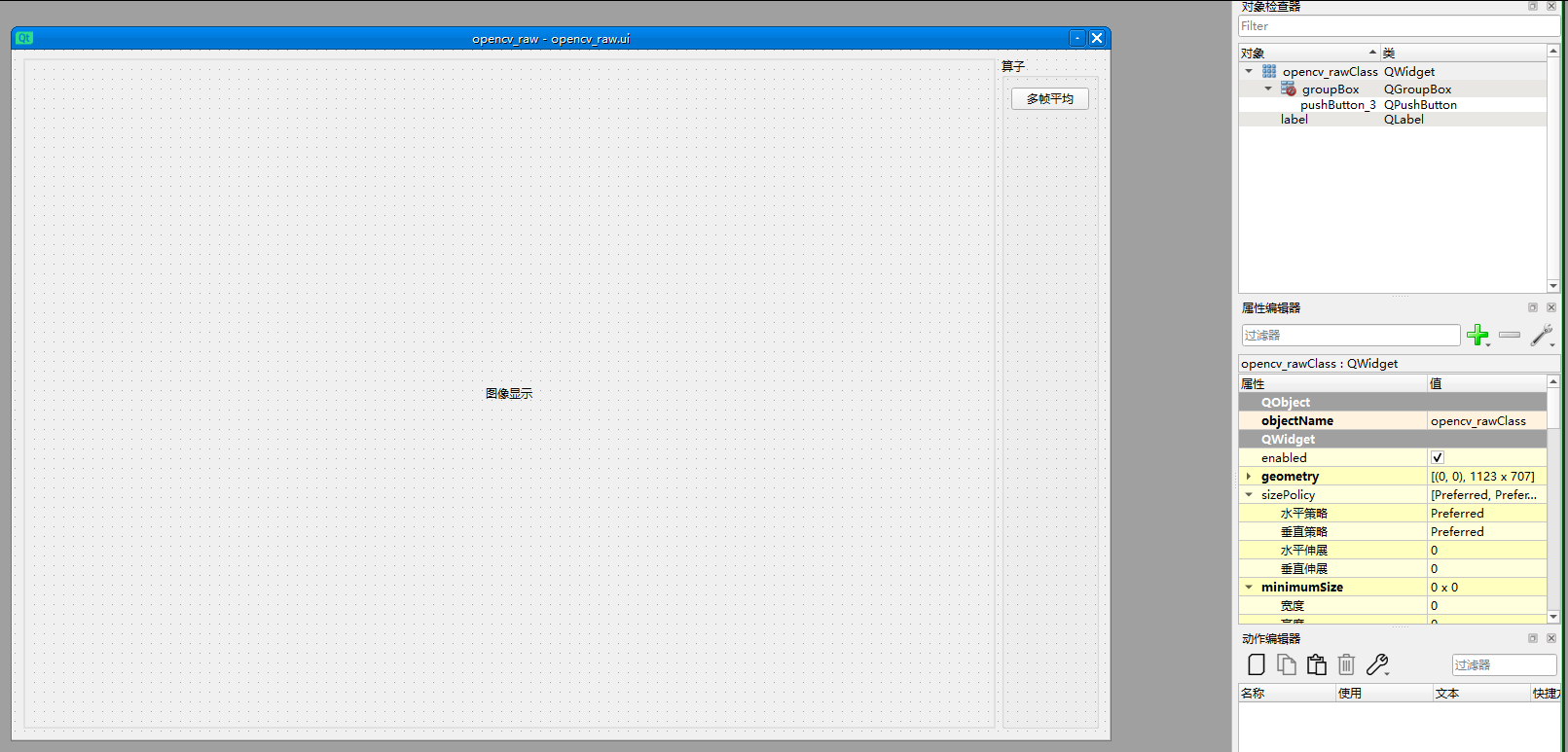
本次项目的UI界面:
解决方案:
opencv_raw.h
cpp
#pragma once
#include <QtWidgets/QWidget>
#include "ui_opencv_raw.h"
#include <QFile>
#include <QFileDialog>
#include <QThread>
#include <QImage>
#include <QMessageBox>
#include <vector>
#include <iostream>
#include <opencv2/opencv.hpp> // 引入opencv头文件
#include <opencv2/dnn_superres.hpp> // 引入超分辨率头文件
#include <opencv2/features2d.hpp> // 引入特征检测头文件
using namespace std; // 引入标准命名空间
using namespace cv; // 引入opencv命名空间
using namespace dnn_superres; // 引入超分辨率命名空间
class raw_thread; // 向前声明
class opencv_raw : public QWidget
{
Q_OBJECT
public:
opencv_raw(QWidget* parent = nullptr);
~opencv_raw();
raw_thread* raw; // 对象
QThread* thread; // 线程
int width = 1536; // 图像宽度
int height = 1184; // 图像高度
QFile file; // 打开raw文件
Mat clone; // 深拷贝图像
signals:
void send_raw_5files(const vector<Mat>&);
public slots:
void read_image(const Mat&);
private:
Ui::opencv_rawClass ui;
};
class raw_thread : public QObject
{
Q_OBJECT
public slots:
void read_raw_5files(const vector<Mat>&);
// Gamma校正
Mat gammaCorrection(const Mat& src, double gamma);
// ORB特征对齐
cv::Mat alignWithORB(const cv::Mat& ref_8u, const cv::Mat& frame_8u, cv::Mat& H);
// 多帧平均函数
cv::Mat multiFrameAverage(const std::vector<cv::Mat>& aligned_frames);
signals:
void send_image(const Mat&);
};opencv_raw.cpp
cpp
#include "opencv_raw.h"
opencv_raw::opencv_raw(QWidget* parent)
: QWidget(parent)
{
ui.setupUi(this);
thread = new QThread(this); // 创建线程
raw = new raw_thread(); // 创建线程对象
raw->moveToThread(thread); // 将线程对象移动到线程中
thread->start(); // 启动线程
connect(raw, &raw_thread::send_image, this, &opencv_raw::read_image);
connect(this, &opencv_raw::send_raw_5files, raw, &raw_thread::read_raw_5files);
// 多帧平均按钮
connect(ui.pushButton_3, &QPushButton::clicked, [this]() {
QString folderPath = QFileDialog::getExistingDirectory(this, "选择包含5张RAW的文件夹", QDir::currentPath());
if (folderPath.isEmpty()) return;
QDir dir(folderPath);
QStringList filters;
filters << "*.raw";
QFileInfoList fileInfoList = dir.entryInfoList(filters, QDir::Files);
if (fileInfoList.size() < 5) {
QMessageBox::warning(this, "警告", "文件夹中RAW文件不足5个");
return;
}
// 只取前5个文件
vector<Mat> rawImages;
for (int i = 0; i < 5; ++i) {
QFile file(fileInfoList[i].filePath());
if (!file.open(QIODevice::ReadOnly)) {
qWarning() << "无法打开文件:" << fileInfoList[i].filePath();
continue;
}
Mat img(height, width, CV_16UC1);
qint64 bytesRead = file.read(reinterpret_cast<char*>(img.data), width * height * 2);
if (bytesRead != width * height * 2) {
qWarning() << "文件大小不匹配:" << fileInfoList[i].filePath();
continue;
}
rawImages.push_back(img);
file.close();
}
if (rawImages.size() == 5) {
QMessageBox::information(this, "提示", "成功加载5张RAW文件,开始BM3D处理");
emit send_raw_5files(rawImages);
}
else {
QMessageBox::warning(this, "警告", "实际成功加载的RAW文件不足5个");
}
});
}
opencv_raw::~opencv_raw()
{
thread->quit();
thread->wait(); // 等待线程结束
}
void opencv_raw::read_image(const Mat& src)
{
// 深拷贝
clone = src.clone();
// 转换为QImage
QImage qImg(clone.data, clone.cols, clone.rows, clone.step, QImage::Format_Grayscale8);
qImg.save("9_output.png");
// 显示在label中
QPixmap pixmap = QPixmap::fromImage(qImg);
if (!pixmap.isNull()) {
QSize labelSize = ui.label->size();
QSize scaledSize = pixmap.size().scaled(labelSize, Qt::KeepAspectRatio);
ui.label->setPixmap(pixmap.scaled(scaledSize, Qt::KeepAspectRatio, Qt::SmoothTransformation));
ui.label->setAlignment(Qt::AlignCenter);
}
}raw_thread.cpp
cpp
#include "opencv_raw.h"
void raw_thread::read_raw_5files(const std::vector<cv::Mat>& raw_frames) {
// 1. 多帧ORB对齐
std::vector<cv::Mat> aligned_frames;
aligned_frames.push_back(raw_frames[0]);
for (size_t i = 1; i < raw_frames.size(); ++i) {
cv::Mat ref_8u, frame_8u;
cv::normalize(raw_frames[0], ref_8u, 0, 255, cv::NORM_MINMAX, CV_8UC1);
cv::normalize(raw_frames[i], frame_8u, 0, 255, cv::NORM_MINMAX, CV_8UC1);
cv::Mat aligned_8u, H;
aligned_8u = alignWithORB(ref_8u, frame_8u, H);
if (H.empty()) {
qWarning() << "第" << i << "帧对齐失败,使用原图";
aligned_frames.push_back(raw_frames[i].clone());
continue;
}
cv::Mat aligned_16u;
cv::warpPerspective(raw_frames[i], aligned_16u, H, raw_frames[0].size(),
cv::INTER_LINEAR, cv::BORDER_CONSTANT, cv::Scalar(0));
aligned_frames.push_back(aligned_16u);
qDebug() << "第" << i << "帧16位对齐完成";
}
// 2. 多帧平均去噪
cv::Mat avg_result = multiFrameAverage(aligned_frames);
cv::imwrite("1_avg_result.png", avg_result);
// 3. 16位转8位进行图像处理
cv::Mat display_8u;
double min_val, max_val;
cv::minMaxLoc(avg_result, &min_val, &max_val);
if (max_val - min_val < 30000) {
cv::normalize(avg_result, display_8u, 0, 255, cv::NORM_MINMAX, CV_8UC1);
}
else {
avg_result.convertTo(display_8u, CV_8UC1, 255.0 / 65535.0);
}
cv::imwrite("2_display_8u.png", display_8u);
// 4. CLAHE对比度增强
cv::Mat clahe_img;
cv::Ptr<cv::CLAHE> clahe = cv::createCLAHE(2.0, cv::Size(4, 4));
clahe->apply(display_8u, clahe_img);
cv::imwrite("3_clahe.png", clahe_img);
// 5. Sobel边缘提取
cv::Mat sobel_x, sobel_y, edge;
cv::Sobel(clahe_img, sobel_x, CV_16S, 1, 0, 3);
cv::Sobel(clahe_img, sobel_y, CV_16S, 0, 1, 3);
cv::convertScaleAbs(sobel_x, sobel_x);
cv::convertScaleAbs(sobel_y, sobel_y);
cv::addWeighted(sobel_x, 0.5, sobel_y, 0.5, 0, edge);
cv::imwrite("4_Sobel.png", edge);
// 6. 形态学梯度增强
cv::Mat morph_grad;
cv::Mat kernel = cv::getStructuringElement(cv::MORPH_RECT, cv::Size(3, 3));
cv::morphologyEx(clahe_img, morph_grad, cv::MORPH_GRADIENT, kernel);
cv::imwrite("5_morph_grad.png", morph_grad);
// 7. 多尺度融合
cv::Mat fused;
cv::addWeighted(clahe_img, 0.6, edge, 0.15, 0, fused);
cv::addWeighted(fused, 1.0, morph_grad, 0.15, 0, fused);
cv::imwrite("6_fused.png", fused);
// 8. 伽马亮度增强
double gamma = 0.6;
cv::Mat gamma_corrected = gammaCorrection(fused, gamma);
cv::imwrite("7_gamma_corrected.png", gamma_corrected);
// 9. 转换为3通道(适配ESPCN输入)
cv::Mat src3c;
cv::cvtColor(gamma_corrected, src3c, cv::COLOR_GRAY2BGR);
// 10. ESPCN超分
cv::Mat sr_img;
bool sr_success = true;
std::string model_path = "ESPCN_x4.pb"; // 模型路径
try {
cv::dnn_superres::DnnSuperResImpl sr;
sr.readModel(model_path);
sr.setModel("espcn", 4);
sr.upsample(src3c, sr_img);
cv::cvtColor(sr_img, sr_img, cv::COLOR_BGR2GRAY); // 转回单通道
qDebug() << "ESPCN超分后尺寸:" << sr_img.cols << "x" << sr_img.rows;
if (!cv::imwrite("8_ESPCN_output.png", sr_img)) {
qWarning() << "超分结果保存失败";
}
}
catch (const cv::Exception& e) {
qCritical() << "超分失败:" << e.what();
sr_img = gamma_corrected.clone();
sr_success = false;
}
if (!sr_success) {
emit send_image(gamma_corrected);
return;
}
// 发送最终结果在label中显示
emit send_image(sr_img);
}
// ORB特征对齐(输入8位图像,返回对齐后的8位图像和单应性矩阵H)
cv::Mat raw_thread::alignWithORB(const cv::Mat& ref_8u, const cv::Mat& frame_8u, cv::Mat& H) {
H = cv::Mat(); // 初始化H为空
if (ref_8u.empty() || frame_8u.empty()) {
qCritical() << "ORB对齐失败:输入图像为空";
return frame_8u.clone();
}
// 初始化ORB检测器
cv::Ptr<cv::ORB> orb = cv::ORB::create(8000, 1.2f, 8);
// 提取特征点和描述符
std::vector<cv::KeyPoint> ref_kp, frame_kp;
cv::Mat ref_desc, frame_desc;
orb->detectAndCompute(ref_8u, cv::noArray(), ref_kp, ref_desc);
orb->detectAndCompute(frame_8u, cv::noArray(), frame_kp, frame_desc);
qDebug() << "ORB特征点数量(参考帧:" << ref_kp.size() << ",当前帧:" << frame_kp.size() << ")";
// 检查特征点数量
if (ref_kp.size() < 10 || frame_kp.size() < 10) {
qWarning() << "特征点不足,返回原图";
return frame_8u.clone();
}
// 匹配描述符
cv::BFMatcher matcher(cv::NORM_HAMMING);
std::vector<cv::DMatch> matches;
matcher.match(ref_desc, frame_desc, matches);
// 筛选优质匹配
if (matches.size() < 10) {
qWarning() << "有效匹配点不足(" << matches.size() << "),返回原图";
return frame_8u.clone();
}
std::sort(matches.begin(), matches.end(), [](const cv::DMatch& a, const cv::DMatch& b) {
return a.distance < b.distance;
});
int keep = std::max(10, (int)(matches.size() * 0.2));
matches.resize(keep);
// 提取匹配点坐标
std::vector<cv::Point2f> ref_pts, frame_pts;
for (const auto& m : matches) {
ref_pts.push_back(ref_kp[m.queryIdx].pt);
frame_pts.push_back(frame_kp[m.trainIdx].pt);
}
// 计算单应性矩阵H
H = cv::findHomography(frame_pts, ref_pts, cv::RANSAC, 5.0);
if (H.empty()) {
qWarning() << "单应性矩阵计算失败,返回原图";
return frame_8u.clone();
}
// 对齐8位图像
cv::Mat aligned_8u;
cv::warpPerspective(
frame_8u,
aligned_8u,
H,
ref_8u.size(),
cv::INTER_LINEAR,
cv::BORDER_CONSTANT,
cv::Scalar(0)
);
return aligned_8u;
}
// 多帧平均
cv::Mat raw_thread::multiFrameAverage(const std::vector<cv::Mat>& aligned_frames) {
if (aligned_frames.empty()) {
qCritical() << "多帧平均失败:输入帧为空";
return cv::Mat();
}
// 校验帧尺寸和类型
int rows = aligned_frames[0].rows;
int cols = aligned_frames[0].cols;
for (const auto& frame : aligned_frames) {
if (frame.rows != rows || frame.cols != cols || frame.type() != CV_16UC1) {
qCritical() << "多帧平均失败:帧尺寸或类型不匹配";
return cv::Mat();
}
}
// 32位整数累加避免溢出
cv::Mat sum_mat(rows, cols, CV_32SC1, cv::Scalar(0));
for (const auto& frame : aligned_frames) {
cv::Mat frame_32s;
frame.convertTo(frame_32s, CV_32SC1);
sum_mat += frame_32s;
}
// 计算平均值并转回16位
cv::Mat avg_mat;
sum_mat.convertTo(avg_mat, CV_16UC1, 1.0 / aligned_frames.size(), 0.5); // 四舍五入
return avg_mat;
}
// 伽马亮度增强
cv::Mat raw_thread::gammaCorrection(const cv::Mat& src, double gamma) {
cv::Mat lut(1, 256, CV_8UC1);
uchar* ptr = lut.ptr();
for (int i = 0; i < 256; ++i) {
ptr[i] = cv::saturate_cast<uchar>(255.0 * pow(i / 255.0, gamma));
}
cv::Mat dst;
cv::LUT(src, lut, dst);
return dst;
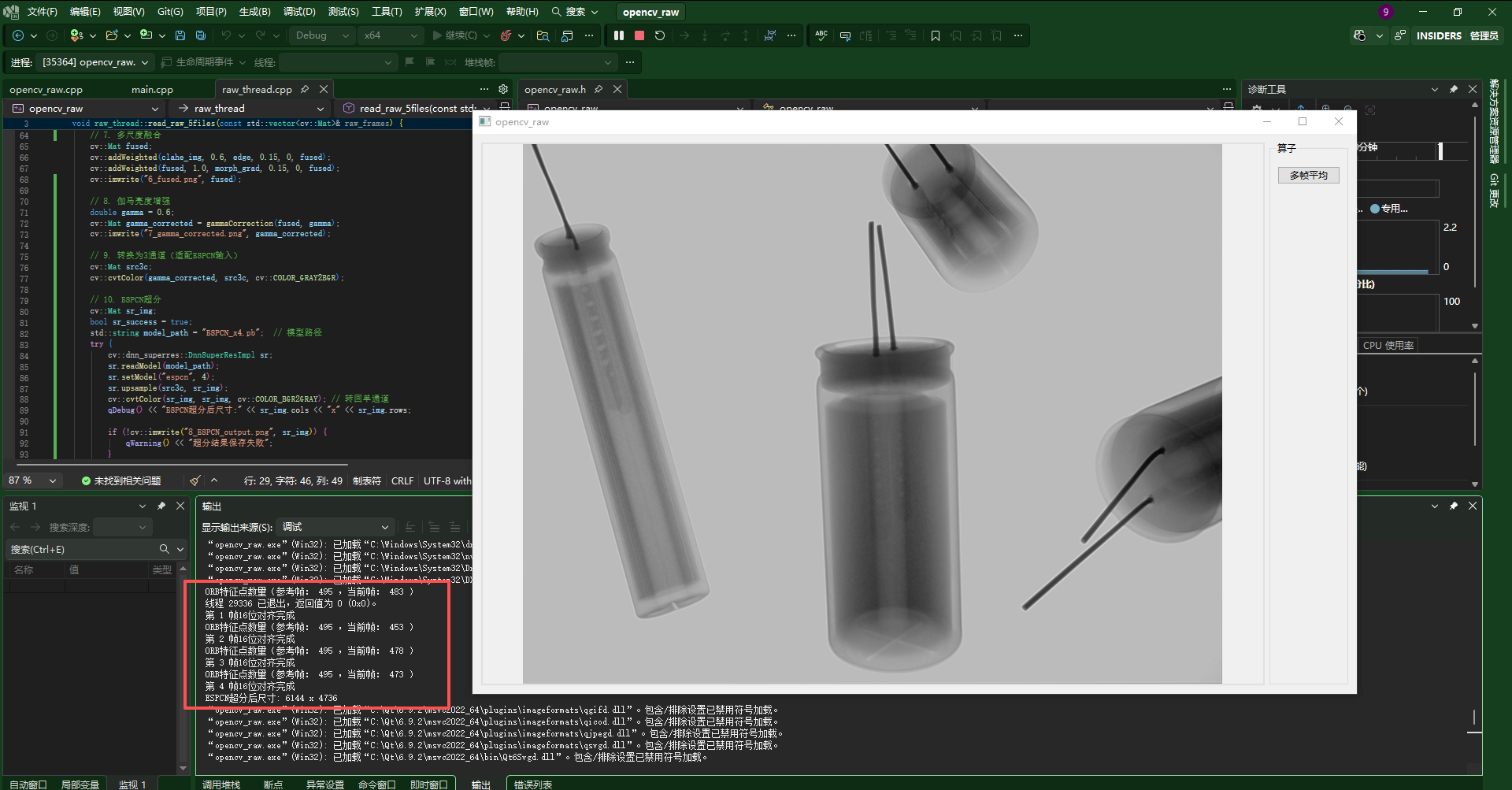
}程序运行效果如下:
三、gitee完整项目下载
https://gitee.com/zjq11223344/opencv_raw![]() https://gitee.com/zjq11223344/opencv_raw
https://gitee.com/zjq11223344/opencv_raw