方案介绍
开发更为复杂、高级的自动驾驶系统,需要通过道路测试采集大量传感器数据和地面实况数据,以验证传感器功能并训练自动驾驶算法。
如何准确高效的采集、储存和转移车辆上各类高带宽传感器产生的数据,需要采集系统具备多类型传感器采集能力及强大的运算能力,保证设备性能稳定,同时可进行灵活的配置和扩展,并且提供软件层面的灵活配置及数据处理,以提升数据采集的效率和质量。
针对自动驾驶系统开发和测试阶段,大量传感器数据采集及验证需求,推出专业化自动驾驶数据采集方案,包含采集所需硬件、软件及定制化服务,助力提升研发效率
方案优势
精准授时与同步
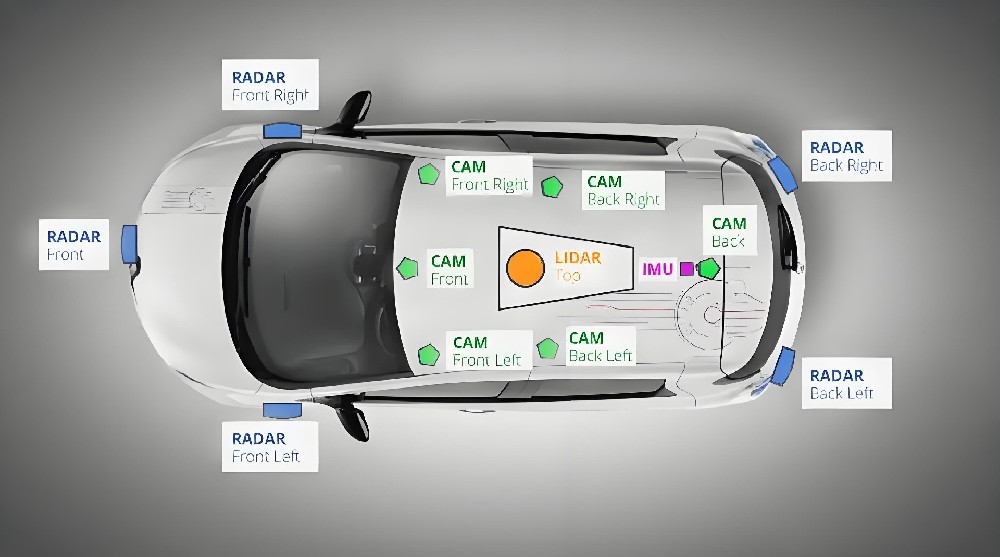
支持来自不同传感器(如Lidar、Camera、IMU等)的数据以纳秒级时间同步精度被捕获和处理,确保自动驾驶算法分析的有效性和准确性。
相机和lidar时间戳同步误差小于1ms
Lidar通过gPTP授时精度小于20μs
多路相机Trigger模式曝光同步误差小于10μs

高带宽传输及存储
支持高带宽传输及存储,确保数据能够迅速、准确地从采集点传输到处理中心,并能迅速、安全地存储,为后续的数据分析和处理提供了坚实的基础。
10GB/s的高速数据采集
支持磁盘阵列卡+SAS固态硬盘理论最高8GByte/s
最高可无损存储原始数据达120TB
支持数据50~200倍比例压缩
旁路采集无感分流
支持旁路采集,确保在不干扰主系统正常运行的情况下,实现对数据传输的实时监控和数据分析。
不破坏原有的数据流,主机系统无感受
支持多通道数据传输

数据高一致性
实现多种类传感器数据在采集、传输、存储等过程中保持高度一致的状态,确保数据的准确性和可靠性。
采集总线数据与摄像头数据时间统一,ΔT时间误差小于1毫秒
支持连续存储不丢帧