
偏振相机是否属于不同光谱相机的范围内
- 🎯偏振相机
- 🎯一、核心定义与成像原理:本质不同
-
- [1. 偏振相机](#1. 偏振相机)
- [2. 不同光谱相机(多光谱/高光谱相机)](#2. 不同光谱相机(多光谱/高光谱相机))
- 🎯二、核心差异对比表
- 🎯三、特殊情况:是否存在"交叉产品"?
- 🎯结论
🎯偏振相机
偏振相机不属于"不同光谱相机"的范畴,二者的核心原理、成像目标和技术路径存在本质区别,可通过以下维度的对比清晰区分:
🎯一、核心定义与成像原理:本质不同
1. 偏振相机
- 核心目标 :捕捉光的偏振态信息 (而非光谱信息)。
光的偏振是指光波振动方向的特性(如线偏振、圆偏振等),这种信息无法被人眼直接感知,但与物体表面的物理属性(如粗糙度、材质、反射特性)强相关。 - 成像原理 :通过在镜头或传感器前加装偏振片阵列(如微偏振滤光片),将不同偏振方向(通常为0°、45°、90°、135°)的光信号分别记录,再通过算法合成出"偏振度""偏振角"等维度的图像,从而还原物体表面的物理状态(例如区分金属与非金属、识别透明物体缺陷)。
- 关键特征:不改变光的波长(即不区分"红/绿/蓝"或其他光谱波段),仅分析同一波长下光的振动方向特性。
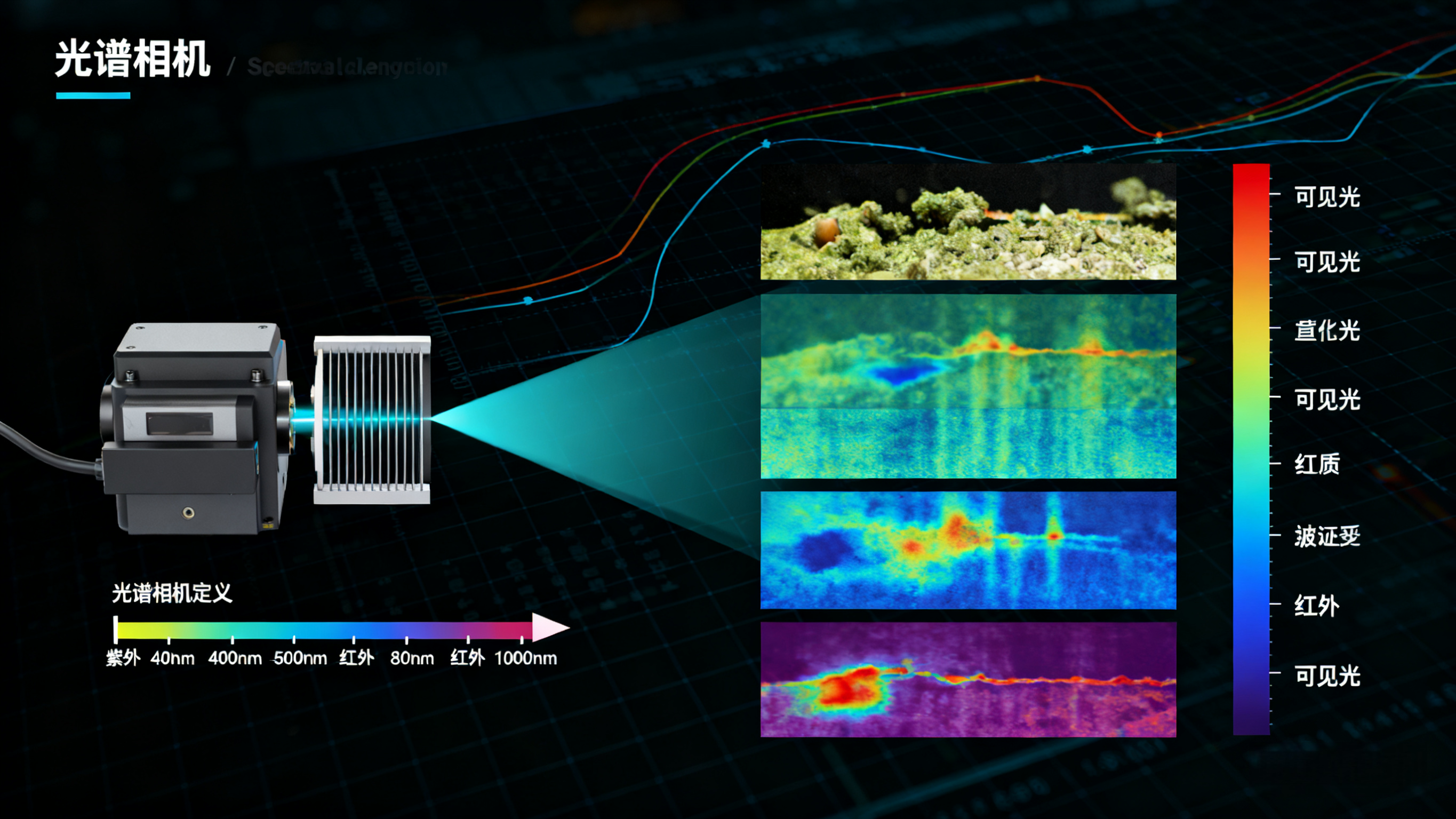
2. 不同光谱相机(多光谱/高光谱相机)
- 核心目标 :捕捉光的波长(光谱)信息 (而非偏振态)。
光谱是指光按波长划分的"颜色范围",除了人眼可见的可见光(400-760nm),还包括紫外(<400nm)、红外(>760nm)等不可见波段。不同物质对不同波长的光有独特的"吸收/反射"规律(即"光谱指纹"),光谱相机正是通过捕捉这一规律来识别物质成分。 - 成像原理 :通过分光元件(如光栅、滤光片轮、棱镜)将入射光按波长拆分,再由传感器分别记录不同波长波段的图像(例如多光谱相机会采集5-20个特定波段,高光谱相机会采集数百个连续波段),最终形成"空间+光谱"的三维数据(光谱立方体),用于物质识别(如农业中区分作物健康度、工业中检测材料成分)。
- 关键特征:核心是"区分不同波长的光",不涉及光的偏振态分析。

🎯二、核心差异对比表
| 对比维度 | 偏振相机 | 不同光谱相机(多光谱/高光谱) |
|---|---|---|
| 捕捉的核心信息 | 光的偏振态(振动方向特性) | 光的波长(光谱) 特性 |
| 技术核心 | 偏振片阵列(拆分偏振方向) | 分光元件(拆分波长) |
| 成像目标 | 还原物体表面物理属性(材质、粗糙度等) | 识别物体成分/化学属性(基于光谱指纹) |
| 与"光谱"的关系 | 不区分波长,通常在单一/可见光波段工作 | 以"波长拆分"为核心,覆盖多波段 |
| 典型应用 | 玻璃缺陷检测、金属表面探伤、生物组织成像 | 农业作物长势监测、食品成分分析、环境遥感 |
🎯三、特殊情况:是否存在"交叉产品"?
虽然二者本质不同,但存在"偏振+光谱"的融合相机 (如"偏振高光谱相机"),这类相机同时捕捉偏振态和光谱信息,可用于更复杂的场景(如遥感中同时分析地物材质与成分)。
但需注意:这类融合产品是"两种技术的结合",而非"偏振相机属于光谱相机"------其核心仍是分别独立采集两种不同维度的光信息,再进行联合分析。

🎯结论
偏振相机和"不同光谱相机"是两类完全独立的成像设备:
- 偏振相机聚焦于"光的振动方向",解决"物体表面物理属性识别"问题;
- 光谱相机聚焦于"光的波长",解决"物体成分/化学属性识别"问题。
二者无包含关系,仅在特定复杂场景下可能出现技术融合。
