**
这应该是CSDN第一篇在Qt for android搭建YOLOV11目标检测的博文吧,太难了
**
耗费接近两天...特意记录和分享一下
Pytorch Yolov11目标检测+Android部署 留贴记录
这偏博文是对之前三篇yolo11的补充,感兴趣去前面看
1.大前提:还是要先训练一个模型出来,根据自己的需求
这部分看前面吧,都写的挺详细的了,翻翻我之前的博文
2.安卓环境搭建
我用的不是主流的Androidstudio,我也不会用,不熟悉java,我用的是Qt for android,环境自己搭吧
3.正式开始
3.1 首先导出一份torchscript格式的模型文件
python
from ultralytics import YOLO
# Load a model
model = YOLO("best_cow.pt")
model.export(format="torchscript",imgsz = 640,batch = 1)3.2 用pnnx 转换一下格式
这个一般都没有 可以自己下载一下
pip install pnnx ncnn
然后转换命令
yolo11:
pnnx yolo11n.torchscript
自己的模型:
pnnx best_cow.torchscript
有时候找不到pnnx命令,我们找到绝对路径,用exe命令即可,转换成功,会出现下面一堆玩意,这一步就算成功了
*****\Python39\site-packages\pnnx\pnnx.exe yolo11n.torchscript
3.3 开始编辑
这一步网上所有的方案都类似,都是替换一下*_pnnx.py中的文件,如下:
几乎所有的yolo11模型移植,都是参考的这个
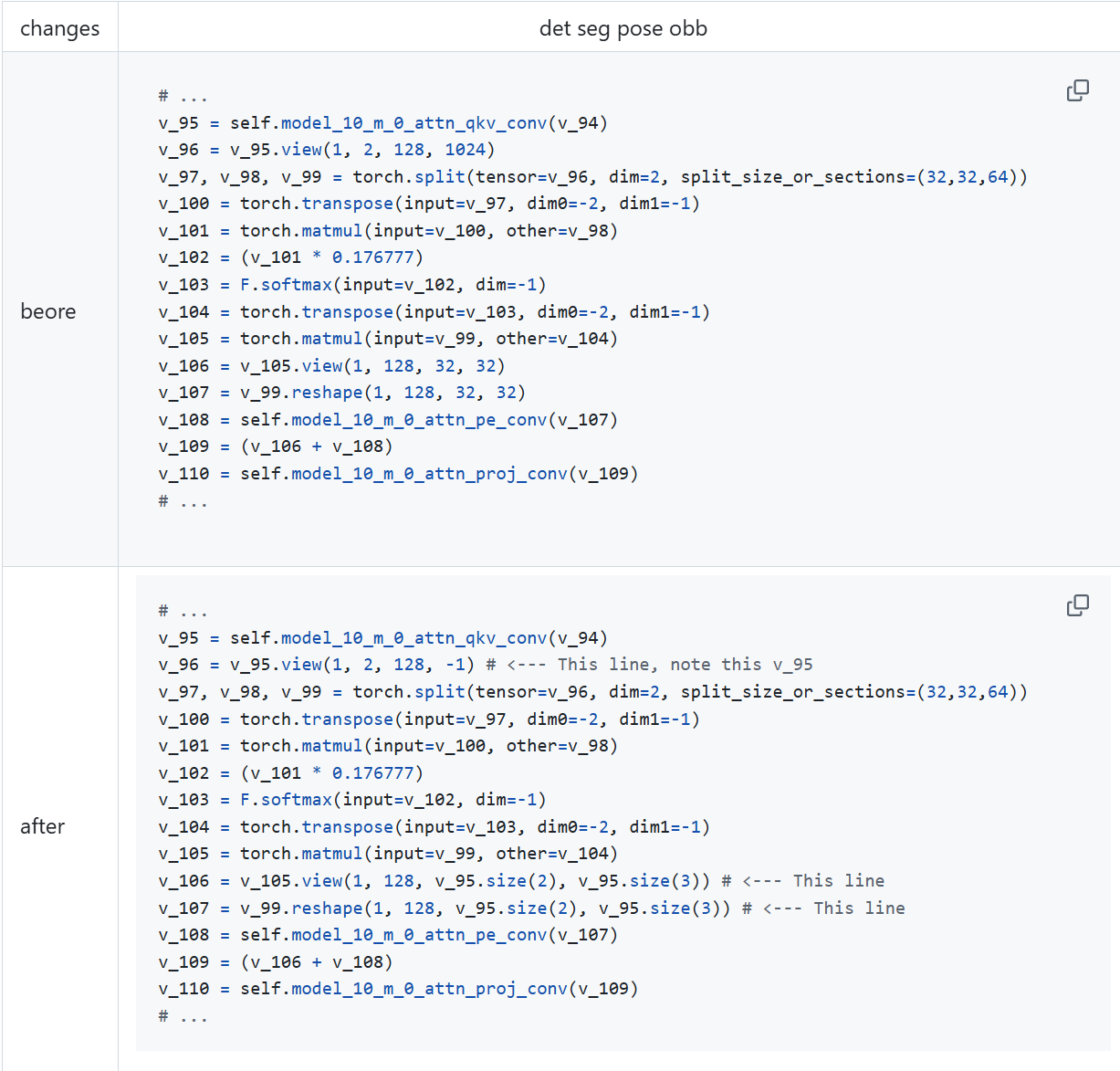
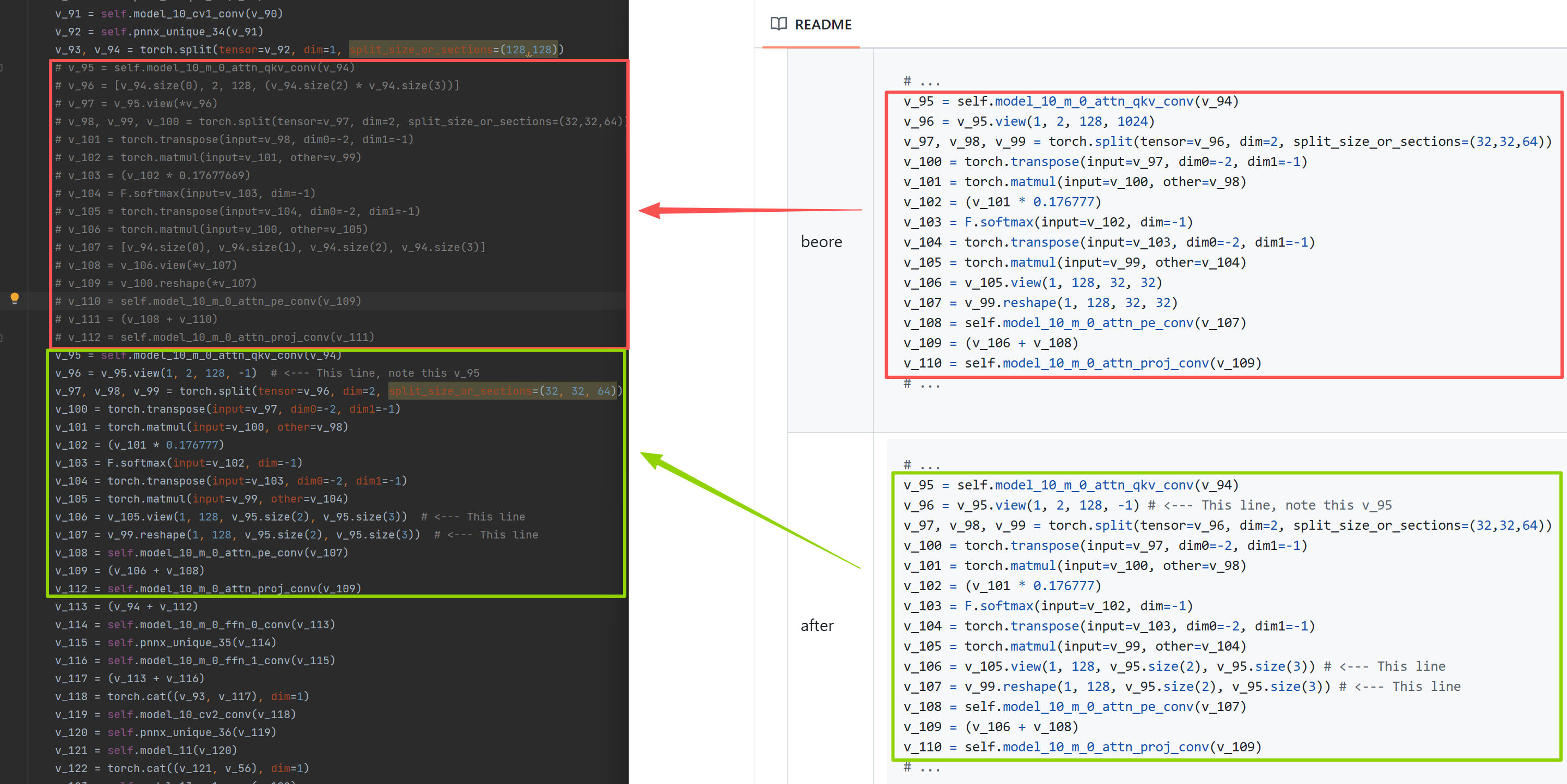
但是我实际转出来的文件,你说一样吧也差不多,说不一样吧,也不太一样,但是基本上差不多:
第一个位置:
这个位置yolo11和自己的模型都一样
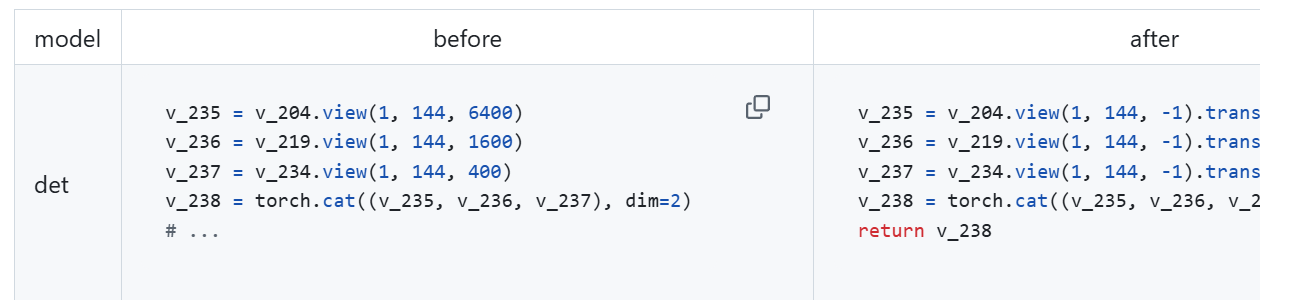
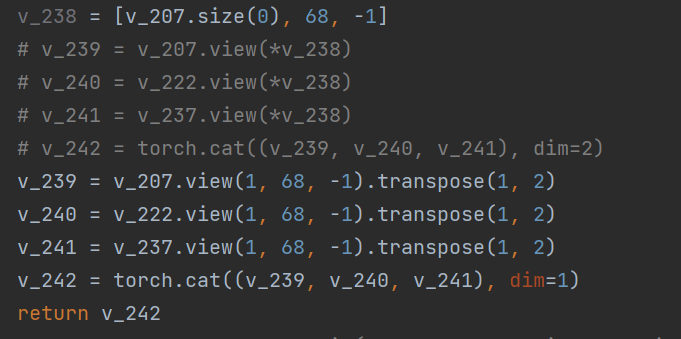
第二个位置:
修改一下,主要区别还是层的命名有点区别
这里需要注意:
yolo11是144,但是自己的模型要看着修改
144 = 4 x 16 +80类
我的是4类,所以是4 x 16 + 4 ,所以我填的是68
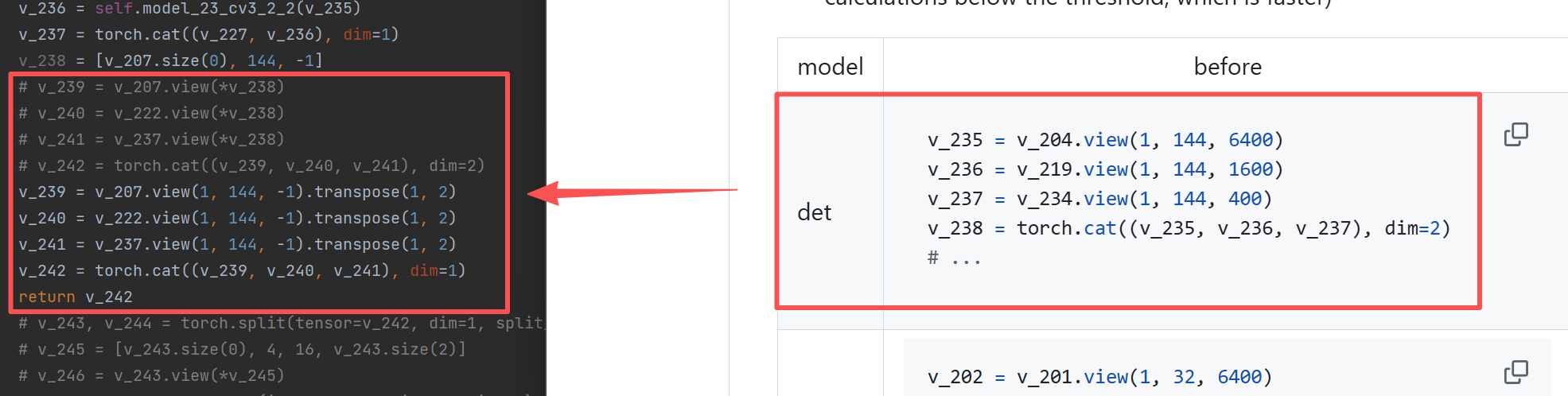
其实上一层就提示是68了,直接抄吧
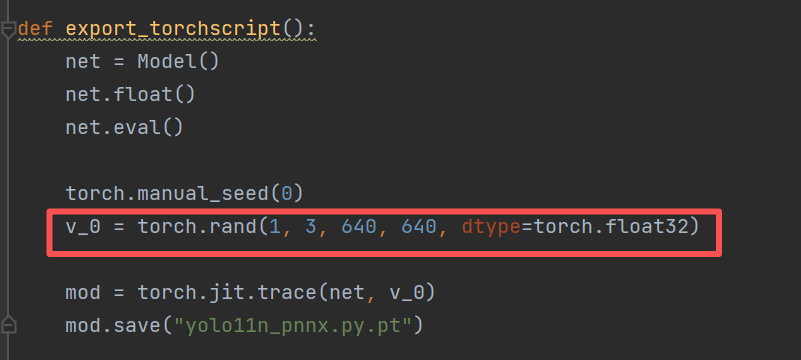
第三个位置:
给个任意输入,替换原来的null
3.4 重新导出一份.torchscript
用改了的这个,重新导出一下,命令如下:
python
import yolo11n_pnnx
yolo11n_pnnx.export_torchscript()运行成功后,出来一个.pt文件
3.5 重新pnnx一份
conda 中执行以下命令
pnnx yolo11n_pnnx.py.pt inputshape=1,3,640,640 inputshape2=1,3,320,320
然后就发现多了这些文件,其中*.ncnn.bin和*.ncnn.param是我们需要的
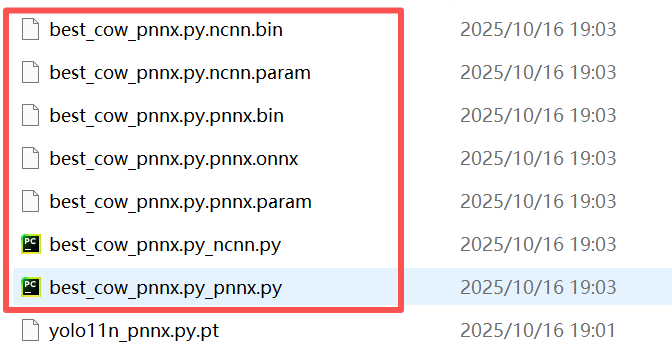
3.6 重命名一份模型文件
把名字里面的_pnnx.py删掉就行
3.7 至此就算模型准备好了
煎熬...
4. 然后开始加入QT
4.1 准备好一个安卓工程,准备这俩C++文件,加入进来,直接就能用
唯一需要改动的就是,绘制里面的类名替换成自己的,或者我压根也不用这个函数
yolo11.h
cpp
#ifndef YOLO11_H
#define YOLO11_H
#include <opencv2/core/core.hpp>
#include <opencv2/core/core.hpp>
#include <opencv2/opencv.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <net.h>
struct KeyPoint
{
cv::Point2f p;
float prob;
};
struct Object
{
cv::Rect_<float> rect;
cv::RotatedRect rrect;
int label;
float prob;
int gindex;
cv::Mat mask;
std::vector<KeyPoint> keypoints;
};
class YOLO11_det
{
public:
YOLO11_det();
~YOLO11_det();
int load(const char* parampath, const char* modelpath, bool use_gpu = false);
int load(AAssetManager* mgr, const char* parampath, const char* modelpath, bool use_gpu = false);
/**
* @brief set_det_target_size 设置影像大小 640
* @param target_size
*/
void set_det_target_size(int target_size);
/**
* @brief set_conf_nms 设置置信度和非极大抑制的参数
* @param conf
* @param nms
*/
void set_conf_nms(float conf,float nms);
/**
* @brief detect 检测 推理
* @param rgb
* @param ww
* @param hh
* @param objects
* @return
*/
int detect(const unsigned char* rgb, int ww, int hh, std::vector<Object>& objects);
int detect(const cv::Mat& rgb, std::vector<Object>& objects);
int draw(cv::Mat& rgb, const std::vector<Object>& objects);
protected:
ncnn::Net yolo11;
int det_target_size;
float m_conf;
float m_nms;
};
#endif // YOLO11_Hyolo11.cpp
cpp
#include "yolo11.h"
#include<QDebug>
#include <QFile>
YOLO11_det::YOLO11_det()
{
det_target_size = 640;
m_conf = 0.5;
m_nms = 0.45;
}
YOLO11_det::~YOLO11_det()
{
det_target_size = 320;
}
void YOLO11_det::set_det_target_size(int target_size){
det_target_size = target_size;
}
void YOLO11_det::set_conf_nms(float conf,float nms)
{
m_conf = conf;
m_nms = nms;
}
int YOLO11_det::load(const char* parampath, const char* modelpath, bool use_gpu)
{
yolo11.clear();
yolo11.opt = ncnn::Option();
#if NCNN_VULKAN
yolo11.opt.use_vulkan_compute = use_gpu;
#endif
// 检查文件是否存在
QFile param_file(parampath);
if (!param_file.exists()) {
qDebug() << "Param file not found or inaccessible:" << QString::fromStdString(parampath);
return -1;
}
QFile model_file(modelpath);
if (!model_file.exists()) {
qDebug() << "Model file not found or inaccessible:" << QString::fromStdString(modelpath);
return -1;
}
// 加载参数文件
int ret = yolo11.load_param(parampath);
if (ret != 0) {
qDebug() << "Failed to load param file:" << QString::fromStdString(parampath) << "error code:" << ret;
return ret;
}
// 加载模型文件
ret = yolo11.load_model(modelpath);
if (ret != 0) {
qDebug() << "Failed to load model file:" << QString::fromStdString(modelpath) << "error code:" << ret;
return ret;
}
return 0;
}
int YOLO11_det::load(AAssetManager* mgr, const char* parampath, const char* modelpath, bool use_gpu)
{
yolo11.clear();
yolo11.opt = ncnn::Option();
#if NCNN_VULKAN
yolo11.opt.use_vulkan_compute = use_gpu;
#endif
yolo11.load_param(mgr, parampath);
yolo11.load_model(mgr, modelpath);
return 0;
}
static inline float intersection_area(const Object& a, const Object& b)
{
cv::Rect_<float> inter = a.rect & b.rect;
return inter.area();
}
static void qsort_descent_inplace(std::vector<Object>& objects, int left, int right)
{
int i = left;
int j = right;
float p = objects[(left + right) / 2].prob;
while (i <= j)
{
while (objects[i].prob > p)
i++;
while (objects[j].prob < p)
j--;
if (i <= j)
{
// swap
std::swap(objects[i], objects[j]);
i++;
j--;
}
}
// #pragma omp parallel sections
{
// #pragma omp section
{
if (left < j) qsort_descent_inplace(objects, left, j);
}
// #pragma omp section
{
if (i < right) qsort_descent_inplace(objects, i, right);
}
}
}
static void qsort_descent_inplace(std::vector<Object>& objects)
{
if (objects.empty())
return;
qsort_descent_inplace(objects, 0, objects.size() - 1);
}
static void nms_sorted_bboxes(const std::vector<Object>& objects, std::vector<int>& picked, float nms_threshold, bool agnostic = false)
{
picked.clear();
const int n = objects.size();
std::vector<float> areas(n);
for (int i = 0; i < n; i++)
{
areas[i] = objects[i].rect.area();
}
for (int i = 0; i < n; i++)
{
const Object& a = objects[i];
int keep = 1;
for (int j = 0; j < (int)picked.size(); j++)
{
const Object& b = objects[picked[j]];
if (!agnostic && a.label != b.label)
continue;
// intersection over union
float inter_area = intersection_area(a, b);
float union_area = areas[i] + areas[picked[j]] - inter_area;
// float IoU = inter_area / union_area
if (inter_area / union_area > nms_threshold)
keep = 0;
}
if (keep)
picked.push_back(i);
}
}
static inline float sigmoid(float x)
{
return 1.0f / (1.0f + expf(-x));
}
static void generate_proposals(const ncnn::Mat& pred, int stride, const ncnn::Mat& in_pad, float prob_threshold, std::vector<Object>& objects)
{
const int w = in_pad.w;
const int h = in_pad.h;
const int num_grid_x = w / stride;
const int num_grid_y = h / stride;
const int reg_max_1 = 16;
const int num_class = pred.w - reg_max_1 * 4; // number of classes. 80 for COCO
for (int y = 0; y < num_grid_y; y++)
{
for (int x = 0; x < num_grid_x; x++)
{
const ncnn::Mat pred_grid = pred.row_range(y * num_grid_x + x, 1);
// find label with max score
int label = -1;
float score = -FLT_MAX;
{
const ncnn::Mat pred_score = pred_grid.range(reg_max_1 * 4, num_class);
for (int k = 0; k < num_class; k++)
{
float s = pred_score[k];
if (s > score)
{
label = k;
score = s;
}
}
score = sigmoid(score);
}
if (score >= prob_threshold)
{
ncnn::Mat pred_bbox = pred_grid.range(0, reg_max_1 * 4).reshape(reg_max_1, 4);
{
ncnn::Layer* softmax = ncnn::create_layer("Softmax");
ncnn::ParamDict pd;
pd.set(0, 1); // axis
pd.set(1, 1);
softmax->load_param(pd);
ncnn::Option opt;
opt.num_threads = 1;
opt.use_packing_layout = false;
softmax->create_pipeline(opt);
softmax->forward_inplace(pred_bbox, opt);
softmax->destroy_pipeline(opt);
delete softmax;
}
float pred_ltrb[4];
for (int k = 0; k < 4; k++)
{
float dis = 0.f;
const float* dis_after_sm = pred_bbox.row(k);
for (int l = 0; l < reg_max_1; l++)
{
dis += l * dis_after_sm[l];
}
pred_ltrb[k] = dis * stride;
}
float pb_cx = (x + 0.5f) * stride;
float pb_cy = (y + 0.5f) * stride;
float x0 = pb_cx - pred_ltrb[0];
float y0 = pb_cy - pred_ltrb[1];
float x1 = pb_cx + pred_ltrb[2];
float y1 = pb_cy + pred_ltrb[3];
Object obj;
obj.rect.x = x0;
obj.rect.y = y0;
obj.rect.width = x1 - x0;
obj.rect.height = y1 - y0;
obj.label = label;
obj.prob = score;
objects.push_back(obj);
}
}
}
}
static void generate_proposals(const ncnn::Mat& pred, const std::vector<int>& strides, const ncnn::Mat& in_pad, float prob_threshold, std::vector<Object>& objects)
{
const int w = in_pad.w;
const int h = in_pad.h;
int pred_row_offset = 0;
for (size_t i = 0; i < strides.size(); i++)
{
const int stride = strides[i];
const int num_grid_x = w / stride;
const int num_grid_y = h / stride;
const int num_grid = num_grid_x * num_grid_y;
generate_proposals(pred.row_range(pred_row_offset, num_grid), stride, in_pad, prob_threshold, objects);
pred_row_offset += num_grid;
}
}
int YOLO11_det::detect(const unsigned char* rgb, int ww,int hh,std::vector<Object>& objects){
const int target_size = det_target_size;//640;
const float prob_threshold = m_conf;
const float nms_threshold = m_nms;
int img_w = ww;
int img_h = hh;
// ultralytics/cfg/models/v8/yolo11.yaml
std::vector<int> strides(3);
strides[0] = 8;
strides[1] = 16;
strides[2] = 32;
const int max_stride = 32;
int w = img_w;
int h = img_h;
float scale = 1.f;
if (w > h)
{
scale = (float)target_size / w;
w = target_size;
h = h * scale;
}
else
{
scale = (float)target_size / h;
h = target_size;
w = w * scale;
}
ncnn::Mat in = ncnn::Mat::from_pixels_resize(rgb, ncnn::Mat::PIXEL_RGB, img_w, img_h, w, h);
// letterbox pad to target_size rectangle
int wpad = (w + max_stride - 1) / max_stride * max_stride - w;
int hpad = (h + max_stride - 1) / max_stride * max_stride - h;
ncnn::Mat in_pad;
ncnn::copy_make_border(in, in_pad, hpad / 2, hpad - hpad / 2, wpad / 2, wpad - wpad / 2, ncnn::BORDER_CONSTANT, 114.f);
const float norm_vals[3] = {1 / 255.f, 1 / 255.f, 1 / 255.f};
in_pad.substract_mean_normalize(0, norm_vals);
ncnn::Extractor ex = yolo11.create_extractor();
ex.input("in0", in_pad);
ncnn::Mat out;
ex.extract("out0", out);
std::vector<Object> proposals;
generate_proposals(out, strides, in_pad, prob_threshold, proposals);
// sort all proposals by score from highest to lowest
qsort_descent_inplace(proposals);
// apply nms with nms_threshold
std::vector<int> picked;
nms_sorted_bboxes(proposals, picked, nms_threshold);
int count = picked.size();
objects.resize(count);
for (int i = 0; i < count; i++)
{
objects[i] = proposals[picked[i]];
// adjust offset to original unpadded
float x0 = (objects[i].rect.x - (wpad / 2)) / scale;
float y0 = (objects[i].rect.y - (hpad / 2)) / scale;
float x1 = (objects[i].rect.x + objects[i].rect.width - (wpad / 2)) / scale;
float y1 = (objects[i].rect.y + objects[i].rect.height - (hpad / 2)) / scale;
// clip
x0 = std::max(std::min(x0, (float)(img_w - 1)), 0.f);
y0 = std::max(std::min(y0, (float)(img_h - 1)), 0.f);
x1 = std::max(std::min(x1, (float)(img_w - 1)), 0.f);
y1 = std::max(std::min(y1, (float)(img_h - 1)), 0.f);
objects[i].rect.x = x0;
objects[i].rect.y = y0;
objects[i].rect.width = x1 - x0;
objects[i].rect.height = y1 - y0;
}
// sort objects by area
struct
{
bool operator()(const Object& a, const Object& b) const
{
return a.rect.area() > b.rect.area();
}
} objects_area_greater;
std::sort(objects.begin(), objects.end(), objects_area_greater);
return 0;
}
int YOLO11_det::detect(const cv::Mat& rgb, std::vector<Object>& objects)
{
const int target_size = det_target_size;//640;
const float prob_threshold = m_conf;
const float nms_threshold = m_nms;
int img_w = rgb.cols;
int img_h = rgb.rows;
// ultralytics/cfg/models/v8/yolo11.yaml
std::vector<int> strides(3);
strides[0] = 8;
strides[1] = 16;
strides[2] = 32;
const int max_stride = 32;
// letterbox pad to multiple of max_stride
int w = img_w;
int h = img_h;
float scale = 1.f;
if (w > h)
{
scale = (float)target_size / w;
w = target_size;
h = h * scale;
}
else
{
scale = (float)target_size / h;
h = target_size;
w = w * scale;
}
ncnn::Mat in = ncnn::Mat::from_pixels_resize(rgb.data, ncnn::Mat::PIXEL_RGB, img_w, img_h, w, h);
// letterbox pad to target_size rectangle
int wpad = (w + max_stride - 1) / max_stride * max_stride - w;
int hpad = (h + max_stride - 1) / max_stride * max_stride - h;
ncnn::Mat in_pad;
ncnn::copy_make_border(in, in_pad, hpad / 2, hpad - hpad / 2, wpad / 2, wpad - wpad / 2, ncnn::BORDER_CONSTANT, 114.f);
const float norm_vals[3] = {1 / 255.f, 1 / 255.f, 1 / 255.f};
in_pad.substract_mean_normalize(0, norm_vals);
ncnn::Extractor ex = yolo11.create_extractor();
ex.input("in0", in_pad);
ncnn::Mat out;
ex.extract("out0", out);
std::vector<Object> proposals;
generate_proposals(out, strides, in_pad, prob_threshold, proposals);
// sort all proposals by score from highest to lowest
qsort_descent_inplace(proposals);
// apply nms with nms_threshold
std::vector<int> picked;
nms_sorted_bboxes(proposals, picked, nms_threshold);
int count = picked.size();
objects.resize(count);
for (int i = 0; i < count; i++)
{
objects[i] = proposals[picked[i]];
// adjust offset to original unpadded
float x0 = (objects[i].rect.x - (wpad / 2)) / scale;
float y0 = (objects[i].rect.y - (hpad / 2)) / scale;
float x1 = (objects[i].rect.x + objects[i].rect.width - (wpad / 2)) / scale;
float y1 = (objects[i].rect.y + objects[i].rect.height - (hpad / 2)) / scale;
// clip
x0 = std::max(std::min(x0, (float)(img_w - 1)), 0.f);
y0 = std::max(std::min(y0, (float)(img_h - 1)), 0.f);
x1 = std::max(std::min(x1, (float)(img_w - 1)), 0.f);
y1 = std::max(std::min(y1, (float)(img_h - 1)), 0.f);
objects[i].rect.x = x0;
objects[i].rect.y = y0;
objects[i].rect.width = x1 - x0;
objects[i].rect.height = y1 - y0;
}
// sort objects by area
struct
{
bool operator()(const Object& a, const Object& b) const
{
return a.rect.area() > b.rect.area();
}
} objects_area_greater;
std::sort(objects.begin(), objects.end(), objects_area_greater);
return 0;
}
int YOLO11_det::draw(cv::Mat& rgb, const std::vector<Object>& objects)
{
// static const char* class_names[] = {
// "person", "bicycle", "car", "motorcycle", "airplane", "bus", "train", "truck", "boat", "traffic light",
// "fire hydrant", "stop sign", "parking meter", "bench", "bird", "cat", "dog", "horse", "sheep", "cow",
// "elephant", "bear", "zebra", "giraffe", "backpack", "umbrella", "handbag", "tie", "suitcase", "frisbee",
// "skis", "snowboard", "sports ball", "kite", "baseball bat", "baseball glove", "skateboard", "surfboard",
// "tennis racket", "bottle", "wine glass", "cup", "fork", "knife", "spoon", "bowl", "banana", "apple",
// "sandwich", "orange", "broccoli", "carrot", "hot dog", "pizza", "donut", "cake", "chair", "couch",
// "potted plant", "bed", "dining table", "toilet", "tv", "laptop", "mouse", "remote", "keyboard", "cell phone",
// "microwave", "oven", "toaster", "sink", "refrigerator", "book", "clock", "vase", "scissors", "teddy bear",
// "hair drier", "toothbrush"
// };
static const char* class_names[] = {
"level1", "level2", "level3", "level4"
};
static cv::Scalar colors[] = {
cv::Scalar( 67, 54, 244),
cv::Scalar( 30, 99, 233),
cv::Scalar( 39, 176, 156),
cv::Scalar( 58, 183, 103),
cv::Scalar( 81, 181, 63),
cv::Scalar(150, 243, 33),
cv::Scalar(169, 244, 3),
cv::Scalar(188, 212, 0),
cv::Scalar(150, 136, 0),
cv::Scalar(175, 80, 76),
cv::Scalar(195, 74, 139),
cv::Scalar(220, 57, 205),
cv::Scalar(235, 59, 255),
cv::Scalar(193, 7, 255),
cv::Scalar(152, 0, 255),
cv::Scalar( 87, 34, 255),
cv::Scalar( 85, 72, 121),
cv::Scalar(158, 158, 158),
cv::Scalar(125, 139, 96)
};
for (size_t i = 0; i < objects.size(); i++)
{
const Object& obj = objects[i];
const cv::Scalar& color = colors[i % 19];
// fprintf(stderr, "%d = %.5f at %.2f %.2f %.2f x %.2f\n", obj.label, obj.prob,
// obj.rect.x, obj.rect.y, obj.rect.width, obj.rect.height);
cv::rectangle(rgb, obj.rect, color);
char text[256];
sprintf(text, "%s %.1f%%", class_names[obj.label], obj.prob * 100);
int baseLine = 0;
cv::Size label_size = cv::getTextSize(text, cv::FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
int x = obj.rect.x;
int y = obj.rect.y - label_size.height - baseLine;
if (y < 0)
y = 0;
if (x + label_size.width > rgb.cols)
x = rgb.cols - label_size.width;
cv::rectangle(rgb, cv::Rect(cv::Point(x, y), cv::Size(label_size.width, label_size.height + baseLine)),
cv::Scalar(255, 255, 255), -1);
cv::putText(rgb, text, cv::Point(x, y + label_size.height),
cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 0));
}
return 0;
}调用方法:
初始化:
cpp
m_AIDetector = new YOLO11_det;
// 加载模型文件
const char* param_path = "/storage/emulated/0/NippleGrading/model/best_cow.ncnn.param";
const char* model_path = "/storage/emulated/0/NippleGrading/model/best_cow.ncnn.bin";
bool use_gpu = false; // Android 上通常用 CPU
m_AIDetector->set_det_target_size(640);
m_AIDetector->set_conf_nms(0.5,0.45);
int ret = m_AIDetector->load(param_path, model_path, use_gpu);
if (ret != 0) {
AddLogInfoEng("Failed to load AI model"+QString::fromStdString(param_path),ERROR_LOG_LEVEL);
qDebug()<<"------------------------模型初始化失败--------------------";
delete m_AIDetector;
m_AIDetector = nullptr;
} else {
qDebug()<<"------------------------模型初始化成功--------------------";
UpdateAIConnect(true);
AddLogInfoEng("AI model loaded successfully");
}预测:
cpp
if(m_AIDetector==nullptr){
AddLogInfo("AI未正常初始化,无法进行推理",ERROR_LOG_LEVEL);
AddLogInfoEng("Failed: AI not Init Success, Dont infer",ERROR_LOG_LEVEL);
return ;
}
qDebug()<<"------------------------开始识别....1--------------------";
m_time_start = QDateTime::currentDateTime();
// 2. 执行目标检测
m_AIDetectobjects.clear();
int detectResult = m_AIDetector->detect(VaildImageBuffer[0],m_imgw,m_imgh, m_AIDetectobjects);解析:
cpp
//0.如果是0 表示没有识别到,直接返回
int num = m_AIDetectobjects.size();
//开始显示结果
//1.显示一下图像
std::vector<int>zspoints;
zspoints.resize(4,0);
for (int j = 0; j < num; j++)
{
float x1 = m_AIDetectobjects[j].rect.x;
float y1 = m_AIDetectobjects[j].rect.y;
float x3 = m_AIDetectobjects[j].rect.x+m_AIDetectobjects[j].rect.width;
float y3 = m_AIDetectobjects[j].rect.y+m_AIDetectobjects[j].rect.height;
float score = m_AIDetectobjects[j].prob;
float labelId = m_AIDetectobjects[j].label;
float x2 = x3;
float y2 = y1;
float x4 = x1;
float y4 = y3;
//qDebug()<<x1<<" "<<y1<<" "<<x3<<" "<<y3<<" "<<"score:"<<score<<"labelId:"<<labelId;
QPoint p1(x1, y1), p2(x2, y2), p3(x3, y3), p4(x4, y4);
int label = static_cast<int>(labelId);
ui->widget_l->DrawPolygonWithPoints(p1,p2,p3,p4,colorImage,label);
zspoints[label]+=1;
}4.2 第三方库准备
还需要一堆第三方库,
顺便给小白讲一下,如何纳入opencv及所需要的其他库
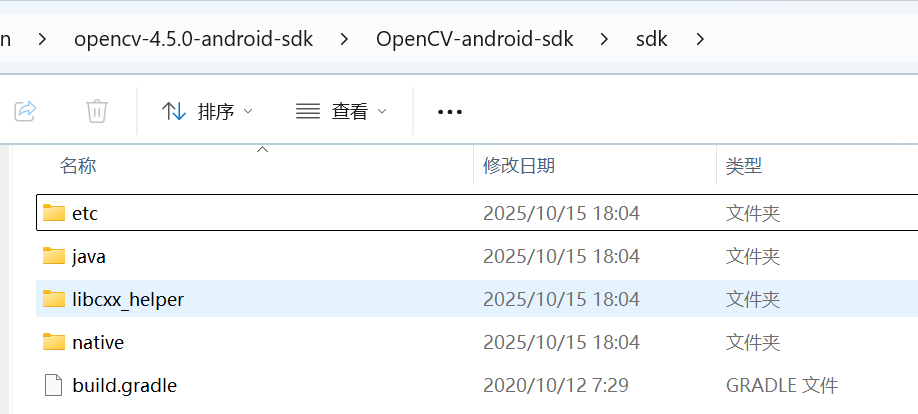
4.2.1 下载opencv,直接下载android版本就行
把下面这里面所有的include和.a 和 .so整理一下,放到一起
pro文件中包含一下,需要注意的是,.so是动态库,需要在/android/libs/里面放一份,并用ANDROID_EXTRA_LIBS 添加一下,这样动态库就会一起打包到apk中,要么编译能通过,时间运行缺库
cpp
QT += androidextras
#.......
android {
# LIBS += -fopenmp
# QMAKE_LFLAGS += -fopenmp
# QMAKE_CXXFLAGS+= -fopenmp
INCLUDEPATH += $$PWD/ThirdLib/ncnn/arm64-v8a/include/ncnn
# LIBS += \
# $$PWD/ThirdLib/ncnn/arm64-v8a/lib/libncnn.so
# 引用 android/libs 目录下的库
ANDROID_EXTRA_LIBS += \
$$PWD/android/libs/arm64-v8a/libncnn.so \
$$PWD/android/libs/arm64-v8a/libomp.so \
$$PWD/android/libs/arm64-v8a/libopencv_java4.so
LIBS += \
$$PWD/android/libs/arm64-v8a/libncnn.so \
$$PWD/android/libs/arm64-v8a/libomp.so \
$$PWD/android/libs/arm64-v8a/libopencv_java4.so
INCLUDEPATH += $$PWD/ThirdLib/opencv/include
LIBS += \
$$PWD/ThirdLib/opencv/lib/opencv/libopencv_calib3d.a \
$$PWD/ThirdLib/opencv/lib/opencv/libopencv_core.a \
$$PWD/ThirdLib/opencv/lib/opencv/libopencv_dnn.a \
$$PWD/ThirdLib/opencv/lib/opencv/libopencv_features2d.a \
$$PWD/ThirdLib/opencv/lib/opencv/libopencv_flann.a \
$$PWD/ThirdLib/opencv/lib/opencv/libopencv_gapi.a \
$$PWD/ThirdLib/opencv/lib/opencv/libopencv_highgui.a \
$$PWD/ThirdLib/opencv/lib/opencv/libopencv_imgcodecs.a \
$$PWD/ThirdLib/opencv/lib/opencv/libopencv_imgproc.a \
$$PWD/ThirdLib/opencv/lib/opencv/libopencv_ml.a \
$$PWD/ThirdLib/opencv/lib/opencv/libopencv_objdetect.a \
$$PWD/ThirdLib/opencv/lib/opencv/libopencv_photo.a \
$$PWD/ThirdLib/opencv/lib/opencv/libopencv_stitching.a \
$$PWD/ThirdLib/opencv/lib/opencv/libopencv_video.a \
$$PWD/ThirdLib/opencv/lib/opencv/libopencv_videoio.a \
$$PWD/ThirdLib/opencv/lib/3rdparty/libade.a \
$$PWD/ThirdLib/opencv/lib/3rdparty/libcpufeatures.a \
$$PWD/ThirdLib/opencv/lib/3rdparty/libIlmImf.a \
$$PWD/ThirdLib/opencv/lib/3rdparty/libittnotify.a \
$$PWD/ThirdLib/opencv/lib/3rdparty/liblibjpeg-turbo.a \
$$PWD/ThirdLib/opencv/lib/3rdparty/liblibopenjp2.a \
$$PWD/ThirdLib/opencv/lib/3rdparty/liblibpng.a \
$$PWD/ThirdLib/opencv/lib/3rdparty/liblibprotobuf.a \
$$PWD/ThirdLib/opencv/lib/3rdparty/liblibtiff.a \
$$PWD/ThirdLib/opencv/lib/3rdparty/liblibwebp.a \
$$PWD/ThirdLib/opencv/lib/3rdparty/libquirc.a \
$$PWD/ThirdLib/opencv/lib/3rdparty/libtbb.a \
$$PWD/ThirdLib/opencv/lib/3rdparty/libtegra_hal.a \
# $$PWD/ThirdLib/opencv/lib/libopencv_java4.so
ANDROID_PACKAGE_SOURCE_DIR = $$PWD/android
}4.2.2 下载ncnn
我直接下载的是
网上都是添加静态库,我试过不知道为啥不行,动态库可以,而且版本要新点,要不会缺头文件
ncnn-20250916-android-vulkan-shared
也一样,需要include 和 一个.so,一起整理一下
值得注意的是,需要注意安卓编译器的版本 ,一般都会有好几个,看你自己是哪个编译器,选择哪个编译器,pro文件全在上面
4.2.3 把模型文件打包到apk
把模型文件放到这个文件夹下,这样打包才能打包进去
实际安装好的位置如下:
assets:/model/best_cow.ncnn.param
注:
1.值得注意的是,这几个文件是只读的,加载模型加载失败,在启动软件时,需要拷贝到其他地方,在给路径赋值如:
QFile dbFile("assets:/model/best_cow.ncnn.param");
if (dbFile.exists())
{
QString dbPath ="/storage/emulated/0/NippleGrading/model/best_cow.ncnn.param";
dbFile.copy(dbPath);
QFile::setPermissions(dbPath,QFile::WriteOwner | QFile::ReadOwner);
}else{
AddLogInfoEng("assets:/model/best_cow.ncnn.param is not exist",ERROR_LOG_LEVEL);
}
2.小技巧:拷贝,总不能每次打开都拷贝吧,所以加了一个version.txt,用来存版本号,拷贝前对比下版本号,不一致再拷贝,避免问题
5. 至此,算是部署结束了,大家可以照着试试,操作一下
贴个图纪念一下

码字不易,留下点赞和收藏...