VINS-Fusion中IMU用的是惯导坐标系:前x,右y,下z,重力向量G{0.0, 0.0, 9.8},相机使用的坐标系是,右x,下y,前z
公司同事标定好的数据,将坐标系统一为相机坐标系,鄙人觉得这不甚优雅,所以要给他算回来,顺手记录一下运算过程。
cpp
// 左目使用结构外参
// 右目通过左目结构外参和双目标定外参计算得到
body_R_cam0 << -1.0, 0.0, 0.0,
0.0, 1.0, 0.0,
0.0, 0.0, -1.0;
body_t_cam0 << 0.05143, -0.00453, -0.01503;
RIC.push_back(body_R_cam0);
TIC.push_back(body_t_cam0);
cv::FileNode stereoNode = stereoFS["stereo_params"];
double roll = static_cast< double > (stereoNode["Rx"]);
double pitch = static_cast< double > (stereoNode["Ry"]);
double yaw = static_cast< double > (stereoNode["Rz"]);
double tx = static_cast< double > (stereoNode["Tx"]) * 0.001;
double ty = static_cast< double > (stereoNode["Ty"]) * 0.001;
double tz = static_cast< double > (stereoNode["Tz"]) * 0.001;
Eigen::Matrix3d Rx, Ry, Rz;
Rx << 1.0, 0.0, 0.0,
0.0, cos(roll), -sin(roll),
0.0, sin(roll), cos(roll);
Ry << cos(pitch), 0.0, sin(pitch),
0.0, 1.0, 0.0,
-sin(pitch), 0.0, cos(pitch);
Rz << cos(yaw), -sin(yaw), 0.0,
sin(yaw), cos(yaw), 0.0,
0.0, 0.0, 1.0;
Eigen::Matrix3d R_rl = Rz * Ry * Rx;
Eigen::Vector3d t_rl(tx, ty, tz);
body_R_cam1 = body_R_cam0 * R_rl.inverse();
body_t_cam1 = body_R_cam0 * (-R_rl.inverse() * t_rl) + body_t_cam0;
RIC.push_back(body_R_cam1);
TIC.push_back(body_t_cam1);
cpp
---
sn: IB41SZ00880
base: 6.0093750000000000e+01
bxf: 2.2715767578125000e+04
stereo_params:
Tx: -6.0080211639404297e+01
Ty: -3.6239957809448242e-01
Tz: -2.9354727268218994e-01
Rx: -4.1563804261386395e-03
Ry: -8.8217593729496002e-03
Rz: 9.5129925757646561e-03计算过程
cpp
Rx = [1.0, 0, 0;
0, cos(roll), -sin(roll);
0, sin(roll), cos(roll)]
= [1.0, 0, 0;
0, 0.999991, 0.004156;
0, -0.004156, 0.999991]
Ry = [cos(pitch), 0, sin(pitch);
0, 1, 0;
-sin(pitch), 0, cos(pitch)]
= [0.999961, 0, -0.008822;
0, 1, 0;
0.008822, 0, 0.999961]
Rz = [cos(yaw), -sin(yaw), 0;
sin(yaw), cos(yaw), 0;
0, 0, 1]
= [0.999955, -0.009513, 0;
0.009513, 0.999955, 0;
0, 0, 1]
R_rl = Rz * Ry * Rx
t_rl = np.array([-0.060080211639404297, -0.00036239957809448242, -0.00029354727268218994])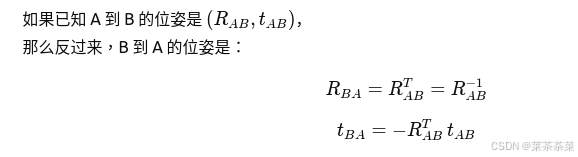
cpp
body_R_cam1 = body_R_cam0 * R_rl.inverse();
body_t_cam1 = body_R_cam0 * (-R_rl.inverse() * t_rl) + body_t_cam0;or
python
body_R_cam1 = body_R_cam0 @ np.linalg.inv(R_rl)
body_t_cam1 = body_R_cam0 @ (-np.linalg.inv(R_rl) @ t_rl) + body_t_cam0
cpp
R_rl =
[[ 0.99991584 -0.0094761 -0.00886071]
[ 0.00951248 0.99994646 0.00407226]
[ 0.00882164 -0.00415621 0.99995245]]
t_rl =
[-0.06008021 -0.0003624 -0.00029355]
原始坐标系中的右目外参:
body_R_cam1 =
[[-0.99991584 -0.00951248 -0.00882164]
[-0.0094761 0.99994646 -0.00415621]
[ 0.00886071 -0.00407226 -0.99995245]]
body_t_cam1 =
[-0.00865119 -0.00473817 -0.01479266]
------>坐标系转化 将imu更新回惯导坐标系
坐标系转换矩阵:从右x,下y,前z → 前x,右y,下z
T_convert = np.array([[0, 0, 1],
[-1, 0, 0],
[0, -1, 0]])
python
# 转换左目外参
body_R_cam0_new = T_convert @ body_R_cam0_old @ T_convert.T
body_t_cam0_new = T_convert @ body_t_cam0_old
# 转换右目外参
body_R_cam1_new = T_convert @ body_R_cam1_old @ T_convert.T
body_t_cam1_new = T_convert @ body_t_cam1_old
cpp
body_T_cam0 (4x4) =
[[-1. 0. 0. -0.01503]
[ 0. -1. 0. -0.05143]
[ 0. 0. 1. 0.00453]
[ 0. 0. 0. 1. ]]
body_T_cam1 (4x4) =
[[-0.99995245 -0.00886071 0.00407226 -0.01479266]
[ 0.00882164 -0.99991584 -0.00951248 0.00865119]
[ 0.00415621 -0.0094761 0.99994646 0.00473817]
[ 0. 0. 0. 1. ]]