目录
【野火】一键下载电路
ISP 普通下载
现在我们针对 USART1 的 ISP 进行分析,通常的 ISP 的步骤如下:
①、电脑通过 USB 转串口线连接 STM32 的 USART1,并打开电脑端的上位机;
②、设置跳线保持 BOOT0 为高电平,BOOT1 为低电平;
③、复位单片机使其进入 Bootloader 模式,通过上位机下载程序;
④、下载完毕,设置跳线保持 BOOT0 为低电平,BOOT1 为低电平;
⑤、 复位单片机即可启动用户代码,正常运行。
以上步骤有个不好的地方就是下载程序需要跳线及复位操作,很繁琐。通过对 ISP 的原理认识,
一键 ISP 就诞生了,它需要做的事情就是用上位机去控制 BOOT0 脚和单片机的复位脚,原理图
如下:
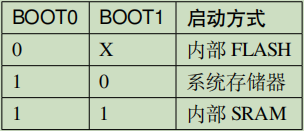
BOOT 配置
在 ISP 下载电路中,我们需要配置 BOOT 引脚,有关 BOOT 引脚不同的配置会产生不同的启动
方式,见下表。
ISP 一键下载
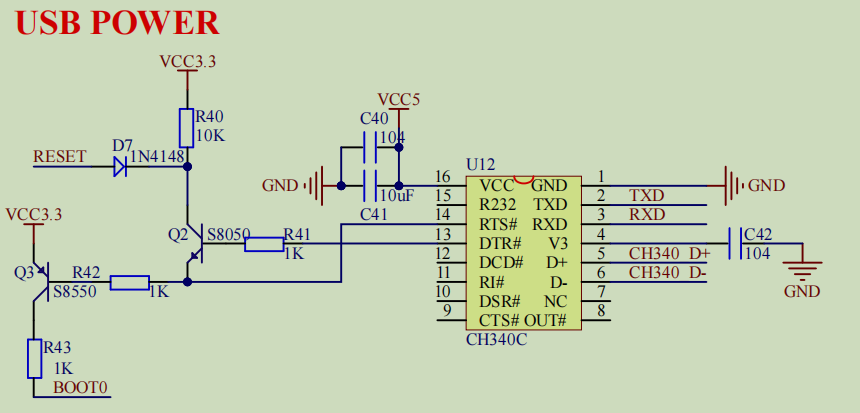
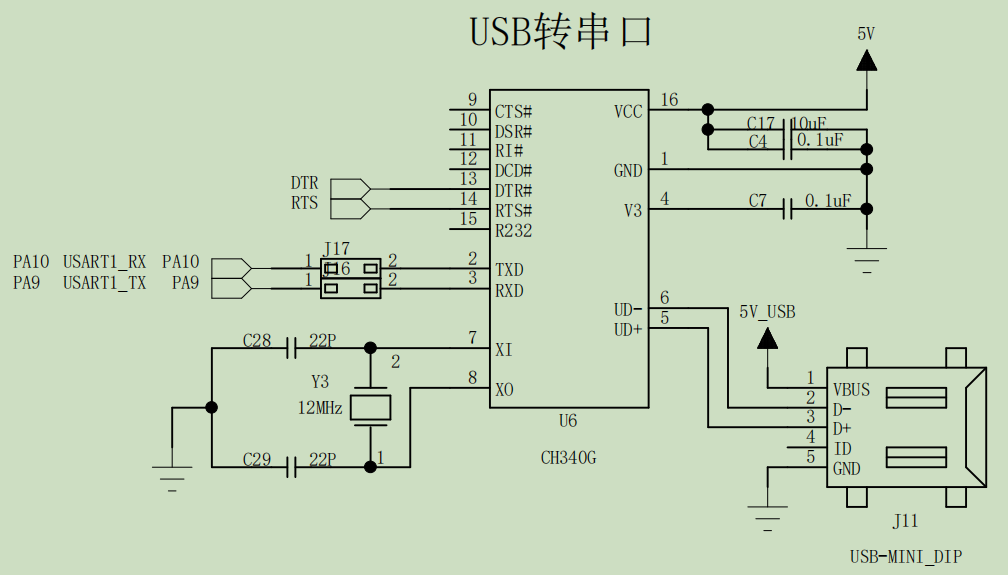
USB 转串口估计大家都很熟悉,一般都是用到 RXD 和 TXD 这两个口,一键 ISP 电路中我们需要用 USB 转串口的芯片的 DTR 口和 RTS 口来控制单片机的 BOOT0 和 NRST,原理如下:
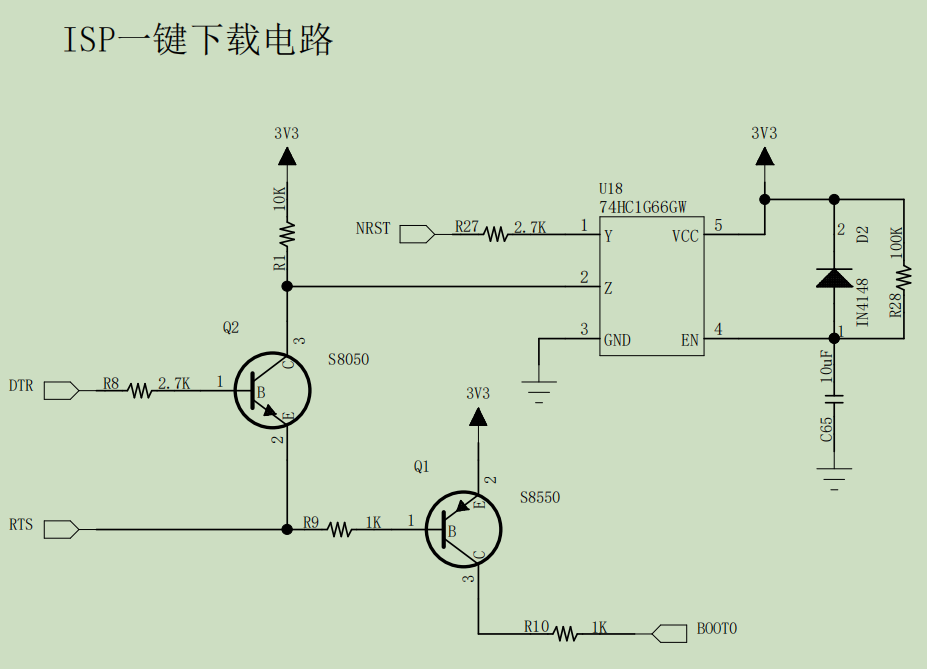
①、通过上位机控制 U6(CH340G) 的 RTS 脚为低电平,Q1 导通,BOOT0 的电平上拉为高电平。
②、通过上位机控制 U6(CH340G) 的 DTR 脚为高电平,由于 RTS 为低电平,Q2 导通,U18 的 2 脚为低电平,U18 为一个模拟开关,使能端由 4 脚控制,默认高电平,U18 的 1 脚和 2 脚导通,所以 NRST 为低电平系统复位。
③、单片机进入 ISP 模式,此时可以将 DTR 脚设置为低电平,RTS 设置为高电平。Q1 和 Q2 为截至状态,BOOT0 和 NRST 还原默认电平。
④、上位机将程序下载到单片机,下载完毕之后,程序自动运行。
⑤、至此,很多人还会认为 U18、Q1、Q2 是多余的,用 U6 的 RTS 和 DTR 直接控制也可以。正常情况下,这样理解没有问题,但是我们忽略了一点,就是单片机上电瞬间如果 USB 转串口连接了电脑,DTR 和 RTS 的电平是变化的,如果不处理好,单片机会一直进入 ISP 模式,或者系统会复位多次,这种情况是不允许的。
⑥、于是,就有了我们全新的一键 ISP 电路。我们主要是分析上电瞬间的逻辑关系,单片机上电时我们通过示波器观察波形得知 DTR 和 RTS 的电平是变化的,但是也有一个规律就是:只要 RTS 为低电平的时候,DTR 的电平也是低,因此一般情况 Q2 不会导通,但由于这两个 IO 口的电平存在"竞争冒险",会出现 RTS 的下降沿的时候刚好遇到 DTR 的上升沿,这个时候 Q2 导通,导致系统复位,而 BOOT0 此时有可能也为高电平,就会进入 ISP 模式。这个是不受我们控制的,我们不想系统出现这样的情况。因此加入了模拟开关来切断这种干扰。
⑦、 加入模拟开关 U18,通过控制 U18 的 4 脚的开关来达到隔离干扰电平的目的。下面我们分析一下延时开关电路,上电瞬间,电容 C65 通过电阻 R18 来充电,由于电阻 100k 很大,电容的充电电流很小,等电容充电达到 U18 的 4 脚的有效电平 2V 时,大概耗时 1S,在这个1S 时间内 U18 的模拟开关是断开的,因此 RTS 和 DTR 的干扰电平不会影响到系统复位。系统正常运行。
【原子】一键下载电路
ISP 一键下载
相比与野火,原子的策略其实就没有去解决竞争冒险的这个 bug 问题,因为他知道应该很少人去使用到串口下载程序。所以,在硬件设计这块,我推荐野火,相比较而要,更加严谨,虽然这个竞争冒险问题可能存在比较小的概率,但是这种细致的研究精神值得我们学习。