
类似于串口、IIC,SPI也是一种通信协议。全称Serial Peripheral interface,串行外围设备接口。
一、SPI概念
1.1物理层
SPI:串行外围设备接口
Motorola(摩托罗拉)首先在其MC68HCXX系列处理器上定义的。
SPI接口主要应用于EEPROM,FLASH,各种传感器,AD转换器等。扩展各种外设,传感器,转换器。
高速的,全双工,同步的串行通信总线。同时发同时收。
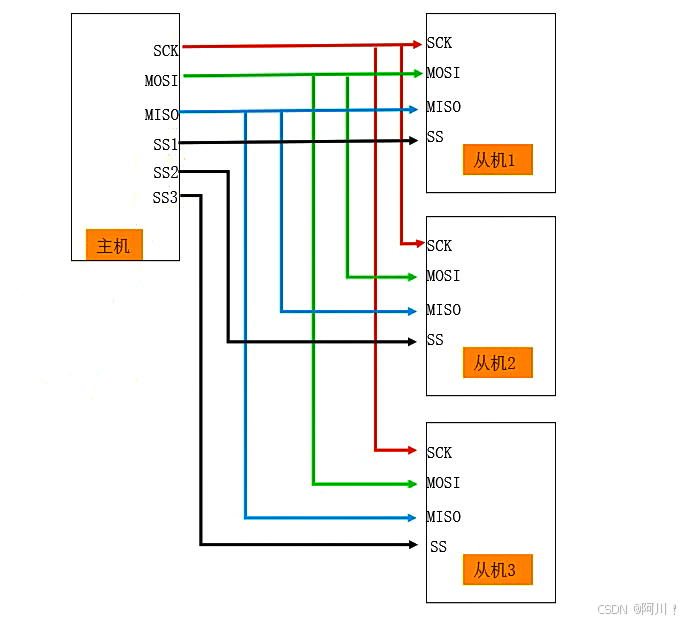
物理层有四条线,时钟 片选 输入 输出
SCK时钟线,用于通讯的数据同步。由主机产生决定通讯的通讯速率。STM32的SPI时钟频率最大为fpclk/2。两个设备通讯,速率受限于低速设备。
MOSI:主设备输出/从设备输入引脚
MISO:主设备输入/从设备输出
SS:片选线或者使能线。主机要连接多条从设备就需要多条片选线。因为SPI通信时,各设备没有地址,不需要地址码,就是费片选线,有几个从设备就要设置多少片选线。主机的片选线只需要任意决定状态的IO口,从设备有决定状态的片选线,被选定时是固定状态。
1.2协议层
1.2.1数据交换过程
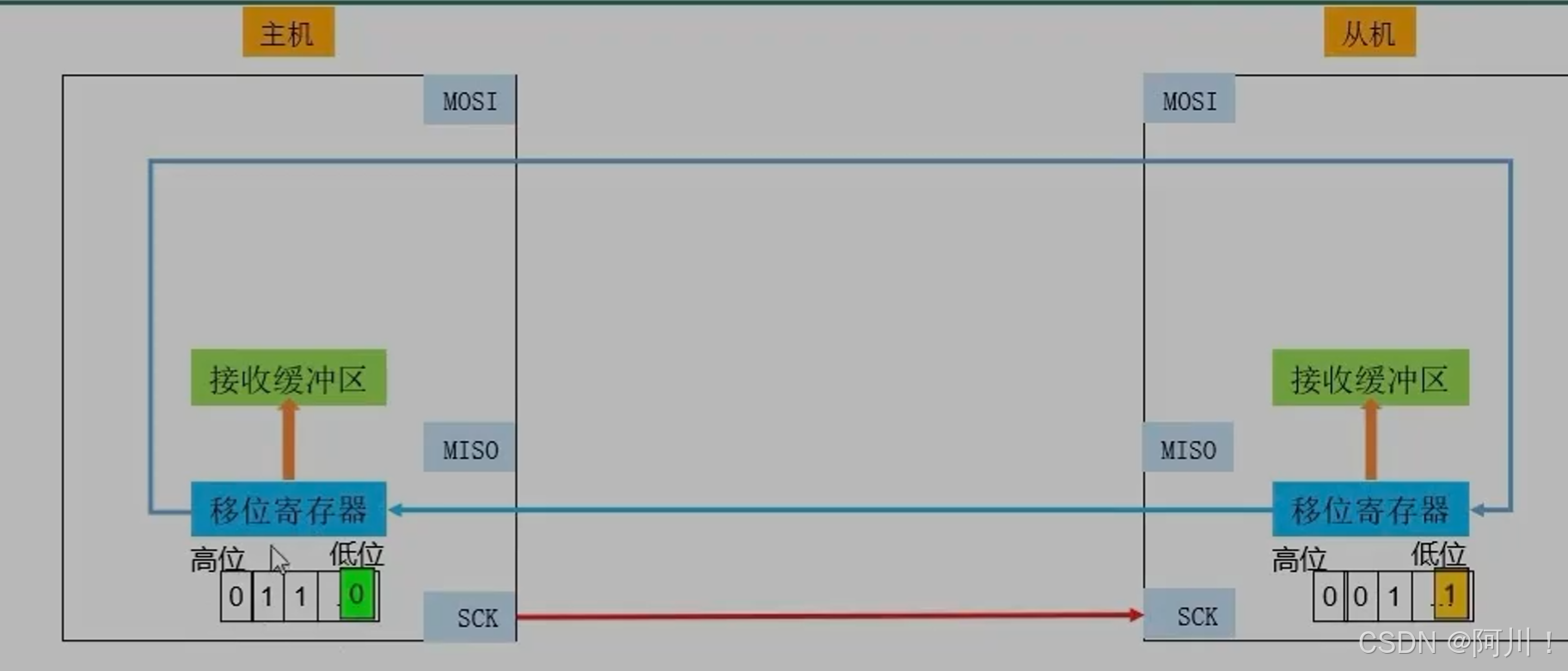
物理层多线,协议层就方便了好多,不需要地址码,基本上就是主从机之间的数据交换。甚至连移位寄存器都可以共用。
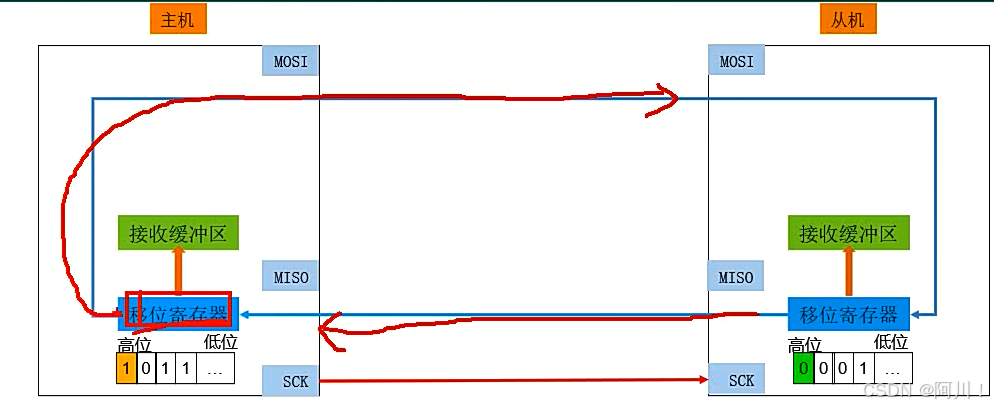
主机寄存器左移一位发出去,低位会空出来,从机高位左移一位发出去,正好填补主机寄存器空出来的低位。
移位寄存器临时存储要交换的数据(来自发送缓冲区)。
接收缓冲区存储最终得到的值。
所谓交换,就是一个循环传递。时钟上升沿,主从机左移一位,将高位的值发出,一般高位先行。时钟下降沿,主从机将低位读取接收,存储到低位寄存器的低位。经过8次交换,就能完成一个字节交换,最后从接收缓冲区读取字节。
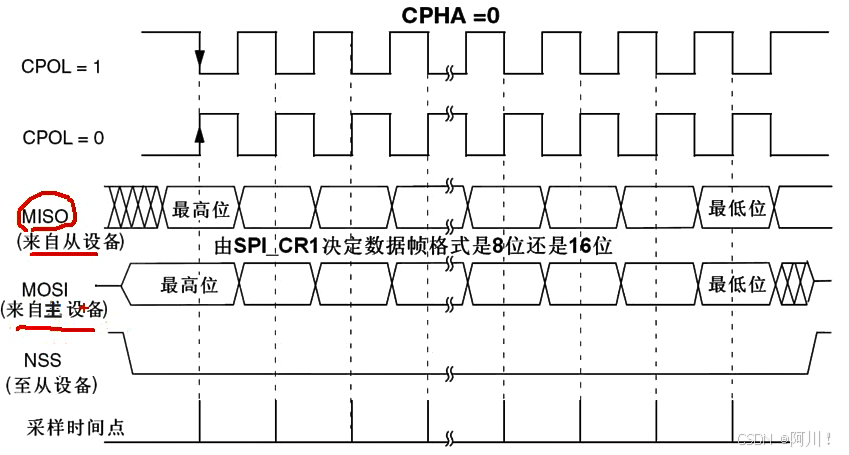
1.2.2时钟的极性与相位
数据采样和设置时钟的极性和相位有关。
通信的整个过程分为空闲时刻和通信时刻。CPOL:Clock Polarity
空闲状态SCK是低电平,CPOL=0;空闲状态SCK是高电平,CPOL=1
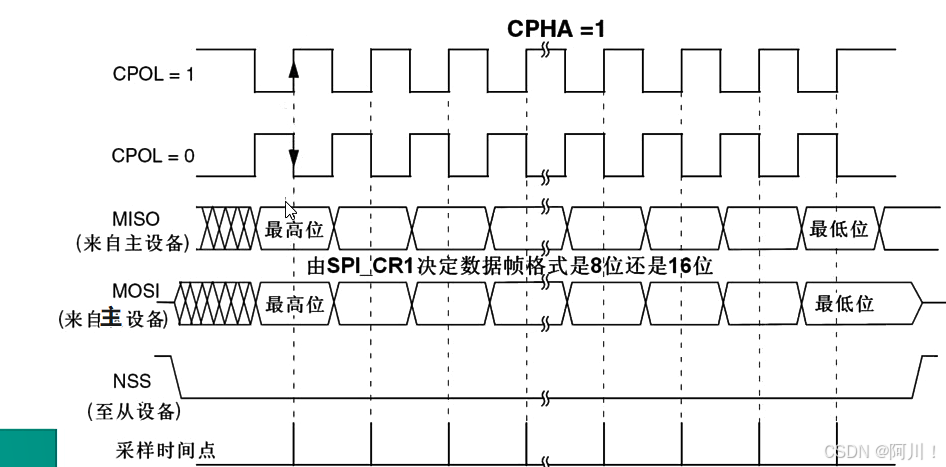
CPHA:clock phase,时钟的相位,直接决定SPI总线从哪个跳变沿开始采样数据。
CPHA=0:表示从第一个跳变沿开始采样;CPHA=1:表示从第2个跳变沿开始采样
通过极性和相位,SPI有四种工作模式。
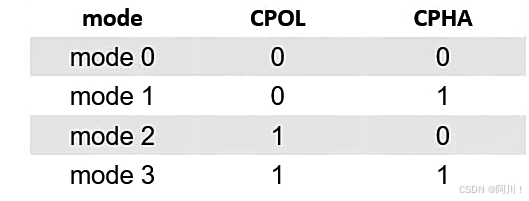
mode0:空闲状态时为低电平,且在第一个跳变沿采样。就是第一个上升沿采样。
mode1:空闲状态为低电平,且在第二个跳变沿采样。第一个下降沿采样。
mode2:第一个下降沿采样。
mode3:第一个上升沿采样。
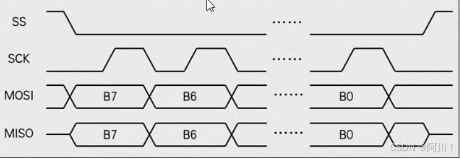
下面是模式0和模式2的时序图:
模式3和模式1
很多设备喜欢上升沿采样,也就是模式0和模式3.大多选择模式0.
二、SPI通信_W25Q32芯片
2.1介绍
SPI与IIC一样,可以拓展各种各样的外设。我们可以用SPI扩展一种名为W25Q32的存储器(NOR FLASH:基于或非门构建的flash)
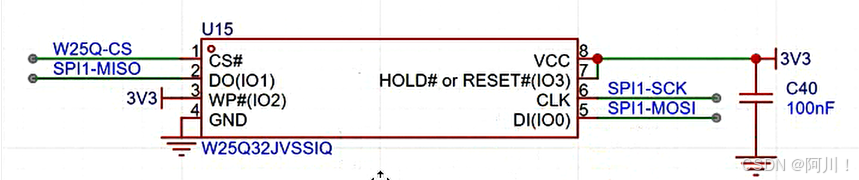
DI:FLASH的输入,连接的是stm32的输出,主设备输出,从设备输入,也就是写入数据。
DO:flash的输出,连接的是stm32的输入,主设备输入,从设备输出,也就是主机在读取flash的数据。
SPI-NSS是从设备选择,主设备连接从设备时,不需要连接自己的片选线,随便用一个IO口连接从设备的片选线。
flash作为从设备,CS连接主机stm32的一个IO口。
flash芯片只支持模式0和模式3;写的时候必须是先擦除,擦除后再写入;移位是高位优先。
这个flash有32M bit,也就是4M字节.
2.2读写要求与存储结构
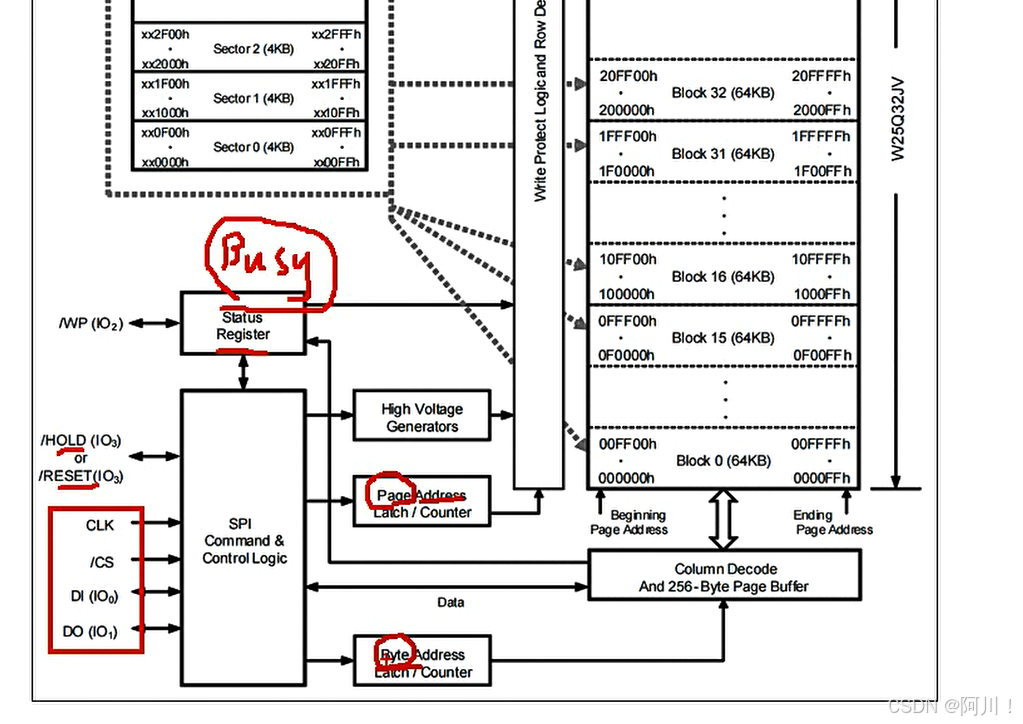
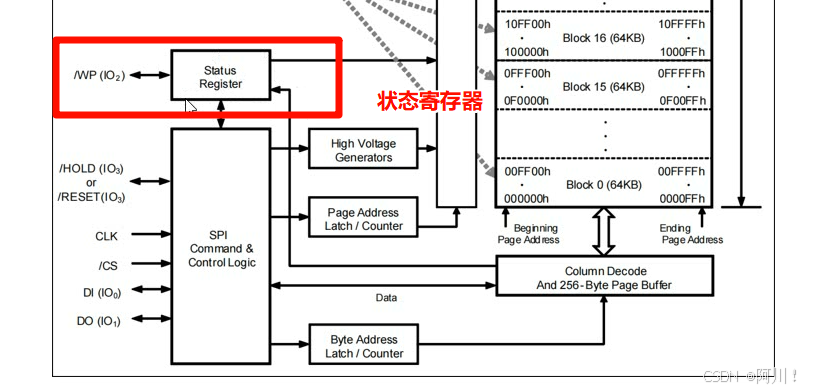
2.2.1状态寄存器
Status Register 状态寄存器表示当前能不能写入。他有一个关键的位叫Busy,置一时不允许写入和读写,只能查询。
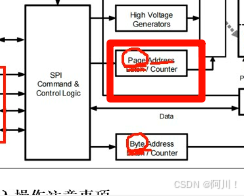
和EEprom一样,也需要页写地址,字节地址。那么4M字节需要多少位来表示?一个字节8位,三个位可以表示其字节,像000 111 010 110 101 100......,三位地址可以表示8这个字节,而8是2的立方,所以可以三位表示。4M字节是2的22次方,所以需要22位来表示极限。22个1位写成十六进制就是0x3fffffh,这个地址线太大了。我们可以划分区块,一块64kB可以划分64块。64k=2^6*2^10=2^16.
block 0范围:0x000000h~0x00ffffh
block 1范围:0x010000h~0x01ffffh
22位地址:前六位块号 4位段号 4位页号 8位页内地址
2.2.2写入操作和读取操作
写入注意事项:
(1)写入操作前,必须先进行写使能。
(2)每个数据位只能由1改写为0,不能由0改写为1.
(3)写入数据前必须先擦除,擦除后,所有数据位变为1,擦除必须按最小擦除单元进行。
(4)连续写入多字节时,最多写入一页的数据,超过页尾位置的数据,会回到页首覆盖写入。
(5)写入操作结束后,芯片进入忙状态(busy),不响应新的读写操作。
读取注意事项:
(1)直接调用读取时序,无需读使能,无需额外操作,没有页的限制。
(2)读取操作结束后不会进入忙状态,但不能在忙状态时读取。
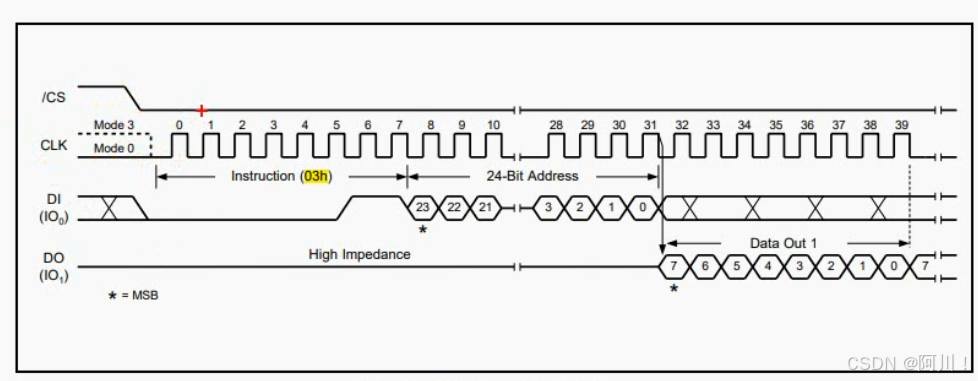
三、W25Q32芯片读写指令
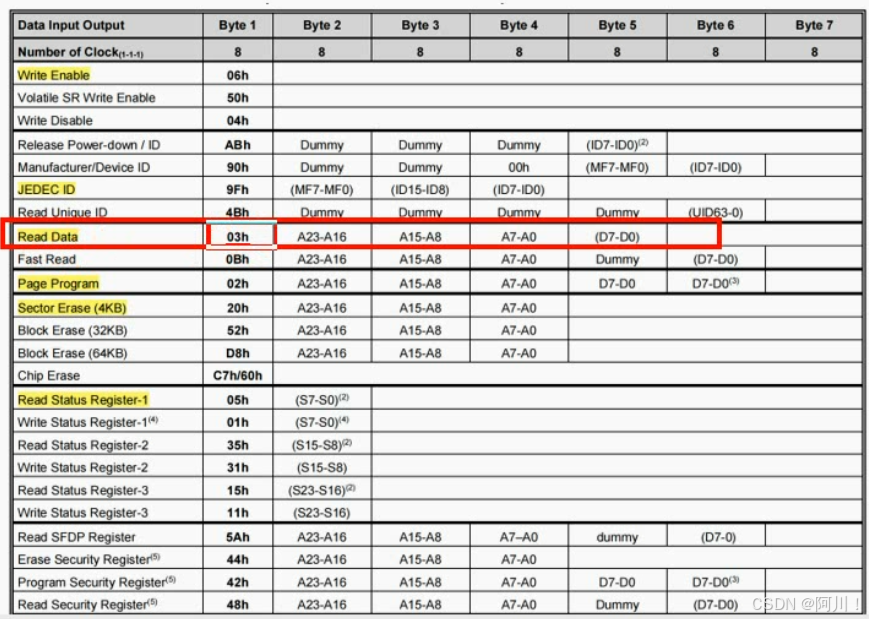
READ DATA:
四、通信案例1------软件模拟SPI读写flash_框架搭建和读取ID
4.1交换数据时序(核心)
一般使用模式0
ss低电平状态开始工作,时序结束后高电平结束工作。
4.2软件模拟SPI读写flash
4.2.1需求描述
基于寄存器操作,使用软件模拟SPI协议,并完成读写FLash。
4.2.2硬件电路设计
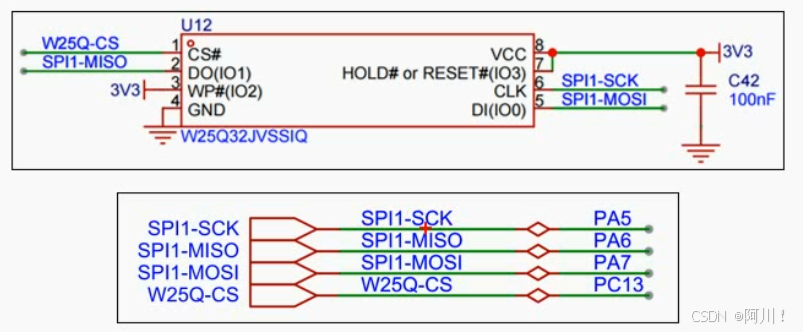
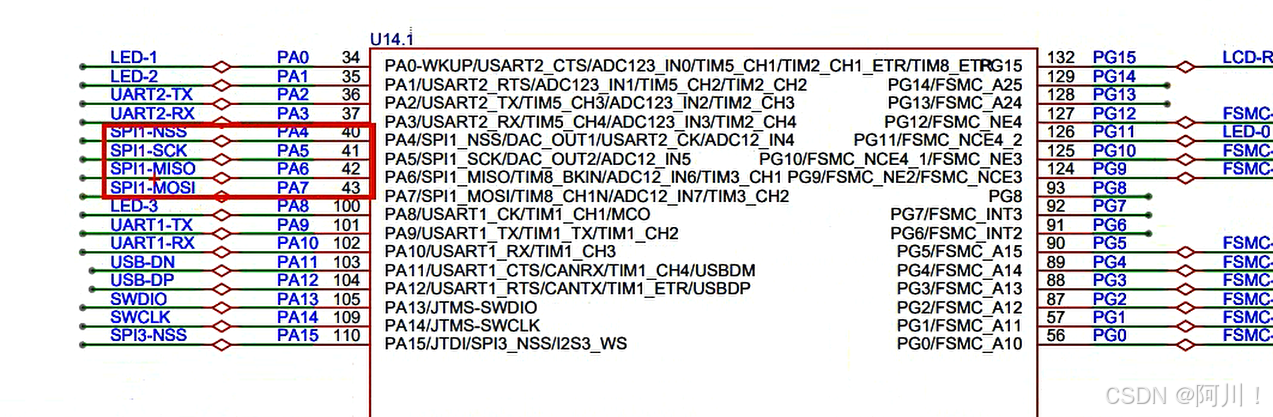
主机的PC13gpio口执行电平状态选择要通信的从设备flash.
GPIO口 PA5模拟时钟线SCK,PA6模拟MISO,PA7模拟MOSI.
4.2.3软件设计(寄存器)
因为时软件模拟,这个工程与IIC相似,所以可以复制之前的IIC软件模拟工程。
在硬件层文件夹里创建SPI文件夹,里面创建spi.c和spi.h文件。接口层里创建FLASH文件夹,里面创建w25q32.c和w25q32.h文件。
#include "spi.h"
// 初始化
void SPI_Init(void)
{
// 1.开启时钟
RCC->APB2ENR |= RCC_APB2ENR_IOPAEN;
RCC->APB2ENR |= RCC_APB2ENR_IOPCEN;
// 2.GPIO工作模式
// 2.1cs-pc13,通用推挽输出,CNF=00,MODE=11
GPIOC->CRH |= GPIO_CRH_MODE13;
GPIOC->CRH &= ~GPIO_CRH_CNF13;
// 2.2SCK-PA5,通用推挽输出,CNF=00,MODE=11
GPIOA->CRL |= GPIO_CRL_MODE5;
GPIOA->CRL &= ~GPIO_CRL_CNF5;
// 2.3MOSI-PA7,通用推挽输出,CNF=00,MODE=11
GPIOA->CRL |= GPIO_CRL_MODE7;
GPIOA->CRL &= ~GPIO_CRL_CNF7;
// 2.4MISO-PA6,浮空输入,CNF=01,MODE=00
GPIOA->CRL &= ~GPIO_CRL_MODE6;
GPIOA->CRL &= ~GPIO_CRL_CNF6_1;
GPIOA->CRL |= GPIO_CRL_CNF6_0;
// 3.SCK 保持空闲状态,模式0-低电平空闲
SCK_LOW;
// 4.片选初始不选中
CS_HIGH;
// 5.延时
SPI_DELAY;
}
// SPI通信的开启和关闭(通过片选信号控制)
void SPI_Start(void)
{
CS_LOW;
}
void SPI_Stop(void)
{
CS_HIGH;
}
// 一个时钟周期内,主从交换一个字节数据
uint8_t SPI_SwapByte(uint8_t byte)
{
// 定义变量接收数据
uint8_t rByte = 0x00;
// 用循环依次读写每一位
for (uint8_t i = 0; i < 8; i++)
{
// 1.判断当前最高位,将MOSI拉至对应电平
if (byte & 0x80)
{
MOSI_HIGH;
}
else
{
MOSI_LOW;
}
//2.左移一位
byte <<= 1;
//3.拉高时钟,在第一个上升沿采样数据
SCK_HIGH;
SPI_DELAY;
//4.先左移,空出最低位来存放读取的数据
rByte <<= 1;
// 2.在MISO上采样读取数据
if (MISO_READ)
{
rByte |= 0x01;//读到高电平,最后一位置1
}
//6.拉低时钟,为下次传输做准备
SCK_LOW;
SPI_DELAY;
}
return rByte;
}
#ifndef __SPI_H_
#define __SPI_H_
#include "stm32f10x.h"
#include "delay.h"
// 宏定义引脚线的操作
// CS -PC13
#define CS_HIGH (GPIOC->ODR |= GPIO_ODR_ODR13)
#define CS_LOW (GPIOC->ODR &= ~GPIO_ODR_ODR13)
//SCK -PA5
#define SCK_HIGH (GPIOA->ODR |= GPIO_ODR_ODR5)
#define SCK_LOW (GPIOA->ODR &= ~GPIO_ODR_ODR5)
//MOSI -PA7
#define MOSI_HIGH (GPIOA->ODR |= GPIO_ODR_ODR7)
#define MOSI_LOW (GPIOA->ODR &= ~GPIO_ODR_ODR7)
//MISO -PA6,读取数据线
#define MISO_READ (GPIOA->IDR & GPIO_IDR_IDR6)
//定义标准延迟时间 100khz 10us
#define SPI_DELAY Delay_us(5)
//初始化
void SPI_Init(void);
//SPI通信的开启和关闭
void SPI_Start(void);
void SPI_Stop(void);
//一个时钟周期内,主从交换一个字节数据
uint8_t SPI_SwapByte(uint8_t byte);
//SPI
#endif
#include "w25q32.h"
//初始化
void W25Q32_Init(void)
{
SPI_Init();
}
//读取JEDEC ID,进行测试
void W25Q32_ReadID(uint8_t *pMID,uint16_t *pDID)
{
//1.开启SPI通信,片选使能
SPI_Start();
//2.发送9fh指令
SPI_SwapByte(0x9f);
//3.依次读取三个字节的ID
//3.1第一个字节,生产商ID
*pMID = SPI_SwapByte(0xff);
//3.2第二个字节,设备ID
*pDID = 0;
*pDID |= SPI_SwapByte(0xff) << 8;
*pDID |= SPI_SwapByte(0xff)& 0xff;
//4.关闭SPI通信
SPI_Stop();
}
#ifndef __W25Q32_H
#define __W25Q32_H
#include "spi.h"
//初始化
void W25Q32_Init(void);
//读取JEDEC ID,进行测试
void W25Q32_ReadID(uint8_t *pMID,uint16_t *pDID);
//写使能和关闭使能
void W25Q32_WriteEnable(void);
void W25Q32_WriteDisable(void);
//等待直到状态不为Busy
void w25q32_wait4NotBusy(void);
//段擦除,传入块号和段号
void W25Q32_EraseSector(uint8_t block,uint8_t sector);
//页写,地址以块号-段号-页号 形式表示
void W25Q32_WritePage(uint8_t block,uint8_t sector,uint8_t page,uint8_t *data,uint16_t len);
//读取
void w25q32_Read(uint32_t addr,uint8_t *buffer,uint16_t len);
#endif
/*
* @Author: wushengran
* @Date: 2024-09-13 16:29:39
* @Description:
*
* Copyright (c) 2024 by atguigu, All Rights Reserved.
*/
#include "usart.h"
#include "delay.h"
#include "w25q32.h"
int main(void)
{
// 初始化
USART_Init();
W25Q32_Init();
printf("软件模拟实验...\n");
//读取JEDEC ID
uint8_t mID=0;
uint16_t dID=0;
W25Q32_ReadID(&mID, &dID);
printf("mID = %x, dID = %#x\n", mID, dID);
while (1)
{
}
}到时候用一个串口调试工具,查看输出的值。