第二章:SAM2视频预测器(视频追踪API)
欢迎回来
在第一章:SAM2图像预测器(图像推理API)中,我们学习了SAM2ImagePredictor如何帮助我们精确地从单张图片中分割对象。它就像是为静态图像配备了一位超级智能的修图师。
但如果你的目标对象不是静止的呢?如果你的宠物猫正在视频中奔跑,而你希望每一帧都能突出显示它,手动在数百甚至数千帧中点击猫咪简直是噩梦!
这时,我们的下一个强大工具SAM2VideoPredictor就派上用场了。你可以把它想象成SAM-2的专属视频追踪导演 。它不仅能够编辑单张图像,还能智能地追踪并分割视频中移动的对象。
解决的问题
SAM2VideoPredictor的核心任务是视频对象分割(VOS),即在视频的所有帧中找到并勾勒出特定对象。
假设有一段繁忙街道的视频,想从红车出现的那一刻开始追踪,直到它驶出画面。这非常具有挑战性,因为:
- 对象会移动和变形:车辆可能转弯、靠近或被部分遮挡。
- 光照变化:阴影、阳光或夜晚会改变其外观。
- 遮挡问题:其他车辆或物体可能暂时挡住红车。
SAM2VideoPredictor通过记忆对象的外观、预测其位置,并根据新帧调整预测来解决这些问题。它就像一位专业的视频编辑,能够智能地跟随并高亮对象,即使它暂时消失又出现!
视频追踪导演
让我们拆解SAM2VideoPredictor如何完成这项复杂任务,就像导演指挥一部电影:
-
场景设置(
inference_state) :在开始追踪之前,导演需要一个"项目文件"。
inference_state是一个特殊的存储区,记录视频和待分割对象的所有重要信息,包括视频帧、初始提示(如点击红车)、历史预测以及描述对象随时间变化的"记忆特征"。随着追踪的进行,这个状态会不断更新。 -
初始选角(添加点击/掩膜) :
你告诉导演要追踪哪个对象,通常通过在第一帧点击红车或绘制一个粗略的掩膜来完成。导演会将这些信息记录在
inference_state中。 -
故事推进(视频追踪) :
一旦有了初始提示,导演就会接管工作。它利用
inference_state中的信息预测对象在下一帧 的位置和形状,更新记忆,并继续处理后续帧。它甚至可以反向 追踪时间,这个过程称为分割传播
简而言之,SAM2VideoPredictor根据初始指引,自动在每一帧中找到目标对象,使视频分割变得高效实用。
如何使用SAM2VideoPredictor
让我们通过一个简单示例来学习如何追踪视频中的对象
步骤1:加载视频预测器
与图像预测器类似,我们需要准备SAM2VideoPredictor,这包括加载核心SAM-2模型并将其封装为视频预测工具。
python
from sam2.build_sam import build_sam2_video_predictor_hf
import torch
# 指定设备(通常为NVIDIA GPU的"cuda")
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
# 1. 加载专为视频追踪训练的SAM-2模型
# "facebook/sam2-hiera-base-plus"是一个示例模型ID。
predictor = build_sam2_video_predictor_hf(
model_id="facebook/sam2-hiera-base-plus",
device=device
)说明 :我们使用build_sam2_video_predictor_hf(类似于第一章的build_sam2_hf)加载必要组件。现在,predictor就是我们的视频追踪导演,准备就绪
步骤2:初始化视频追踪项目(inference_state)
接下来,我们为导演提供视频。预测器会加载帧并设置"项目文件"(inference_state)。
python
import os
import numpy as np
# 假设你有一个名为'my_video_frames'的文件夹,包含JPEG图像
# 例如:my_video_frames/00000.jpg, my_video_frames/00001.jpg等
video_dir = "my_video_frames" # 替换为你的视频帧路径
# 为此示例创建虚拟视频目录和帧
os.makedirs(video_dir, exist_ok=True)
dummy_image = np.zeros((256, 256, 3), dtype=np.uint8)
from PIL import Image
Image.fromarray(dummy_image).save(os.path.join(video_dir, "00000.jpg"))
# 添加另一帧用于追踪
Image.fromarray(dummy_image).save(os.path.join(video_dir, "00001.jpg"))
# 用视频帧初始化追踪状态
inference_state = predictor.init_state(video_path=video_dir)
print(f"视频帧数:{inference_state['num_frames']}")
print(f"视频分辨率:{inference_state['video_height']}x{inference_state['video_width']}")说明 :init_state()准备inference_state,加载视频帧(或其路径),确定视频尺寸,并设置存储对象数据和追踪结果的内部字典
通过处理第一帧的图像特征进行"预热",加速后续步骤
步骤3:为对象添加初始提示(点击/掩膜)
现在,我们告诉导演追踪哪个对象。通常在第一帧(索引0)点击或绘制掩膜,并为对象分配唯一ID(如1)
python
# 假设我们在帧0的(x=100, y=150)处点击对象
ann_frame_idx = 0
ann_obj_id = 1 # 待追踪对象的唯一ID
points = np.array([[100, 150]], dtype=np.float32) # 点击坐标
labels = np.array([1], np.int32) # 标签1表示前景点
# 将此提示添加到预测器
frame_idx_out, obj_ids_out, masks_out = predictor.add_new_points_or_box(
inference_state=inference_state,
frame_idx=ann_frame_idx,
obj_id=ann_obj_id,
points=points,
labels=labels,
)
print(f"帧{frame_idx_out}的掩膜(对象{obj_ids_out})形状:{masks_out.shape}")说明 :add_new_points_or_box()接收你的提示(此处为点击),并将其应用到指定帧和对象。内部调用类似SAM2ImagePredictor的组件,在单帧 中分割对象,结果(掩膜)存储在inference_state中,作为对象1在帧0的起点。
步骤4:在视频中传播分割
最后,我们让导演开始追踪!propagate_in_video方法会逐帧处理整个视频,利用记忆跟随对象。
python
all_tracked_masks = {}
# 'propagate_in_video'是一个Python生成器,
# 逐帧生成处理结果。
for frame_idx, obj_ids, video_res_masks in predictor.propagate_in_video(inference_state):
# 'video_res_masks'包含当前帧所有追踪对象的掩膜,
# 已调整为原始视频分辨率。
# 我们可以存储或显示这些掩膜。
all_tracked_masks[frame_idx] = video_res_masks
print(f"已处理帧{frame_idx}。掩膜形状:{video_res_masks.shape}")
print(f"成功追踪{len(all_tracked_masks)}帧。")
# 循环结束后,'all_tracked_masks'将包含所有追踪帧的分割对象。说明 :propagate_in_video()遍历视频帧。对于每帧,它利用累积的inference_state(包含对象外观和运动历史)预测当前帧的掩膜,更新inference_state并返回结果。这是视频追踪的核心。
技术
让我们深入幕后,了解SAM2VideoPredictor的魔法。
🎢工作流程
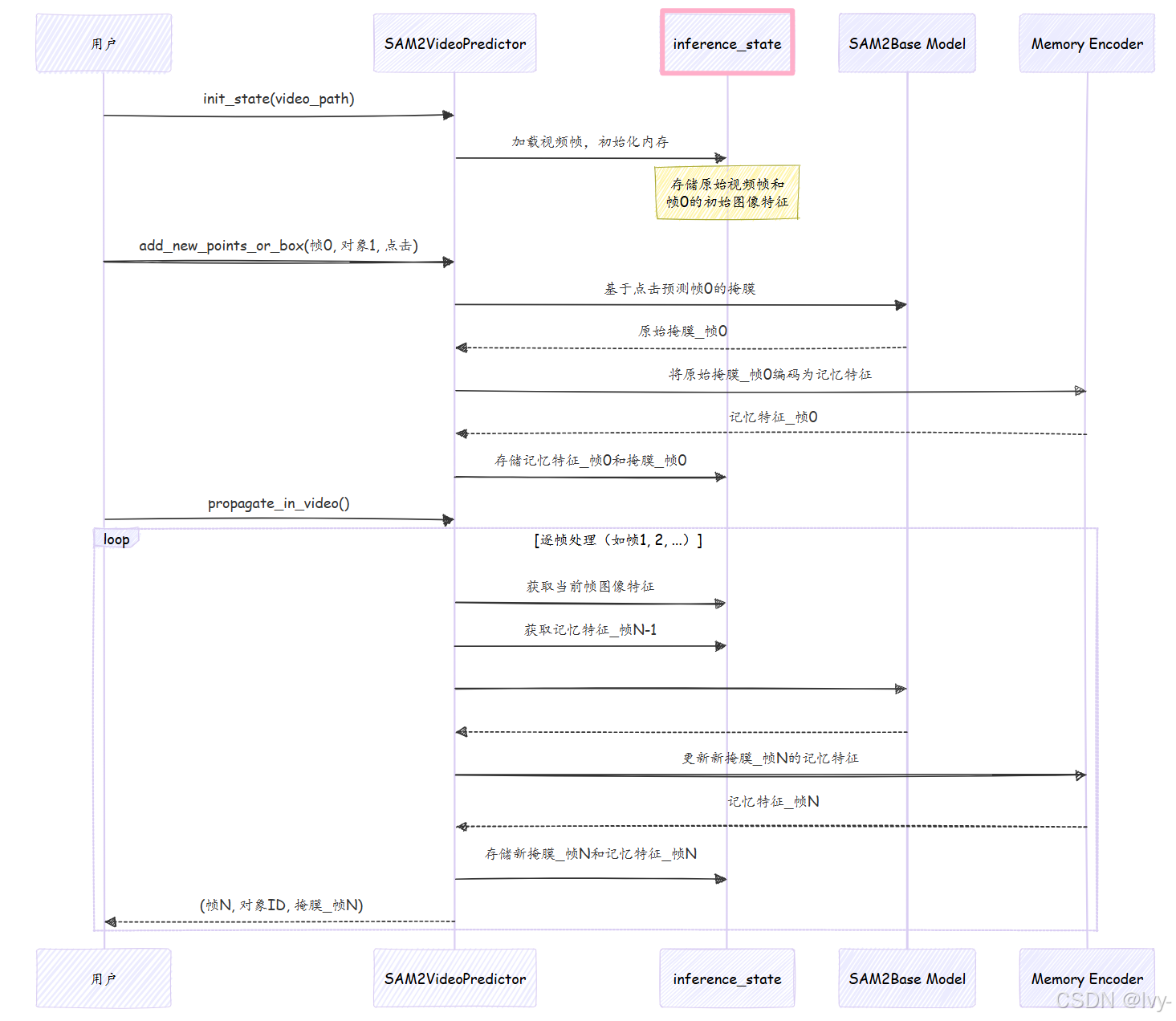
将SAM2VideoPredictor想象成一位经验丰富的导演,配备智能助手(inference_state)。
- **你(用户)**将视频(JPEG图像文件夹)交给导演(
SAM2VideoPredictor)。 - 导演让助手(
inference_state)准备整个视频。助手加载所有帧,并为每个对象和帧创建空文件,同时从第一帧提取初始"精华"(image_features)。 - 在初始帧(如帧0)点击目标对象。
- 导演处理此点击(类似SAM2ImagePredictor的方式),获取掩膜,并将对象的第一张分割图像存入
inference_state,形成"初始外观档案"。导演还使用记忆编码器计算并存储此帧的"记忆特征"。 - 你发出指令:"在整个视频中追踪此对象!"(
propagate_in_video)。 - 对于后续每帧:
这种"预测、更新记忆、保存、移至下一帧"的循环,使SAM2VideoPredictor能够稳健地追踪视频中的对象。
以下是简化的工作流程图:
代码
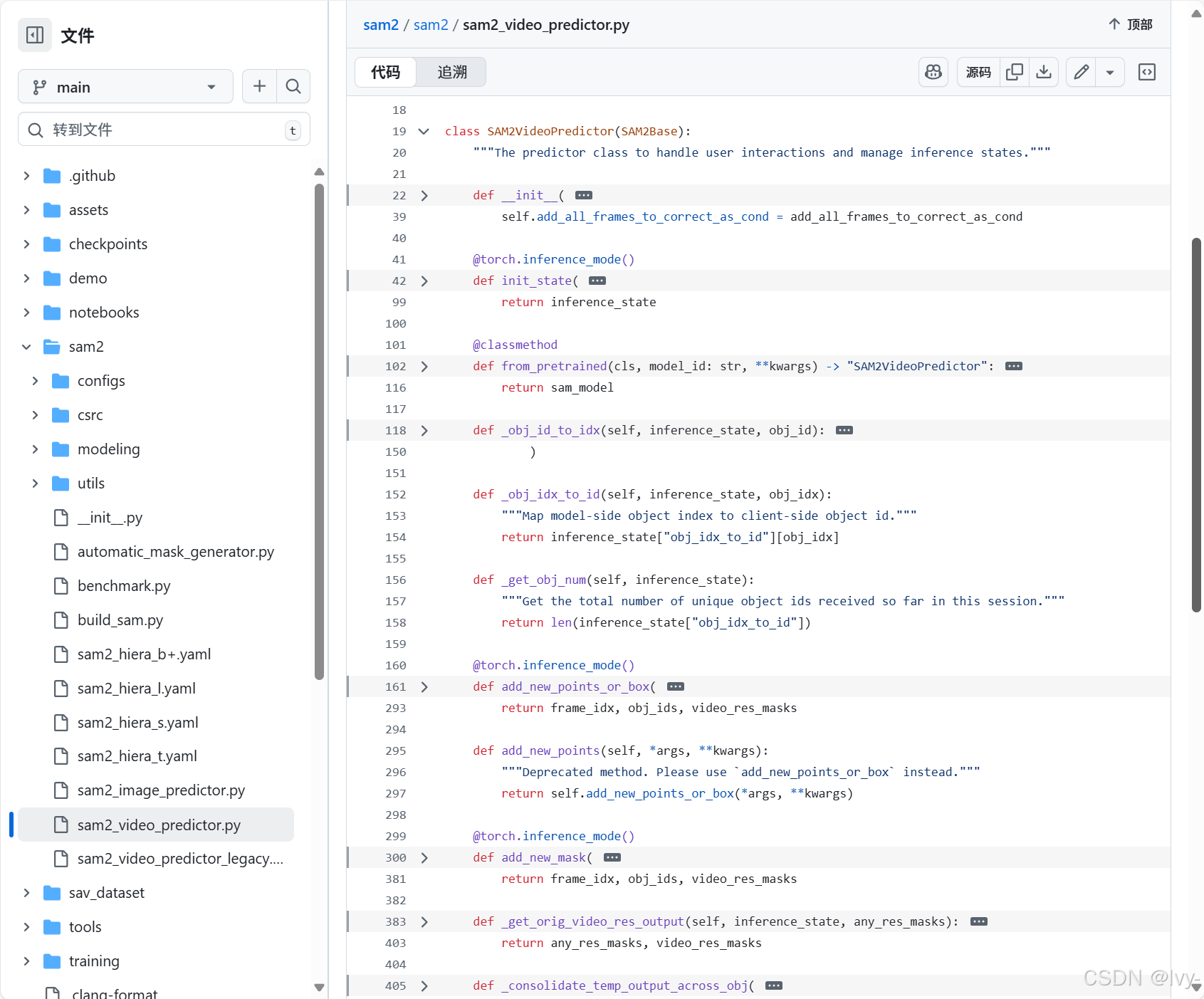
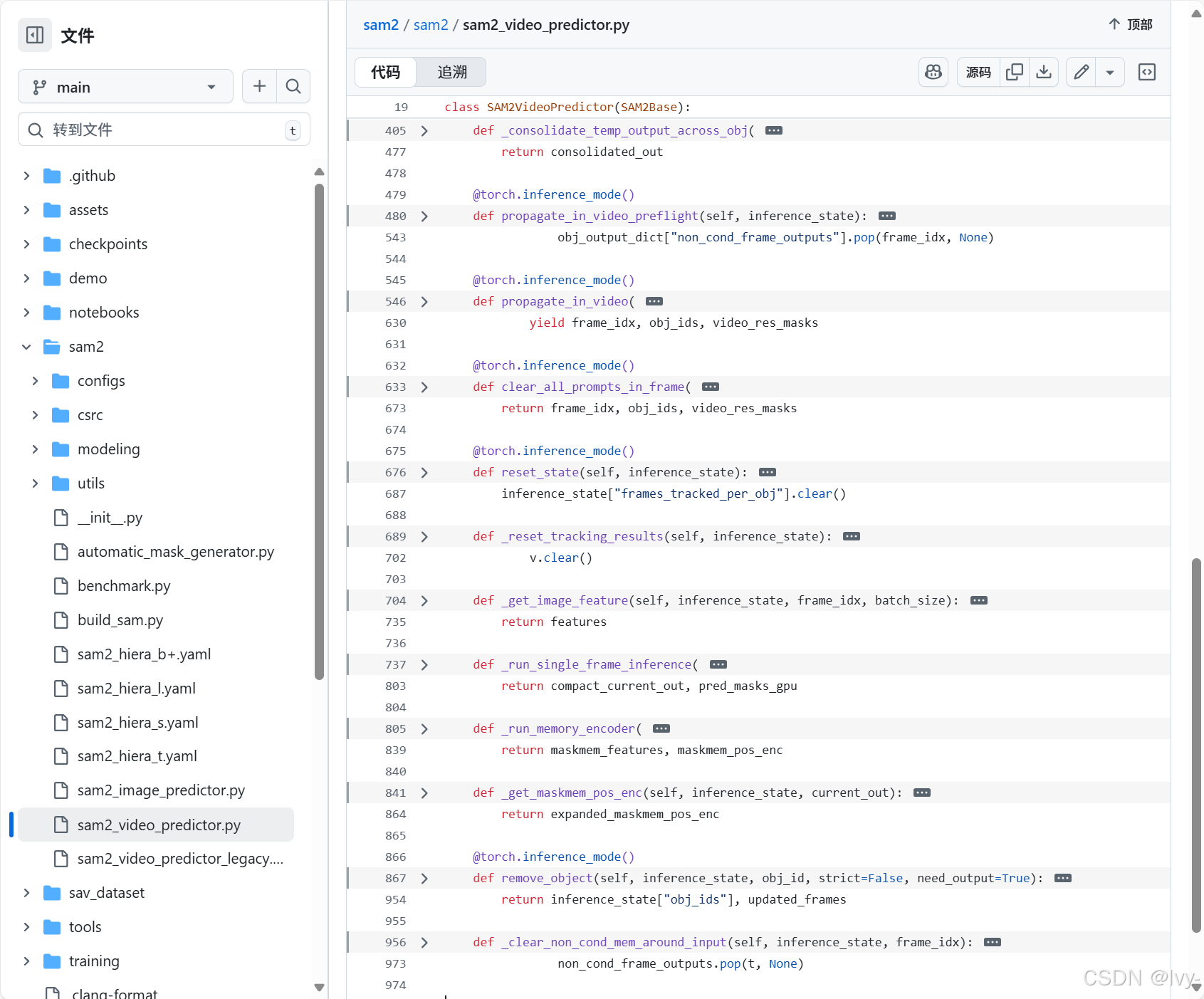
让我们看看sam2/sam2_video_predictor.py中如何实现这些步骤。
-
初始化(
init_state)pythondef init_state(self, video_path, **kwargs): images, video_height, video_width = load_video_frames( video_path=video_path, image_size=self.image_size, **kwargs ) inference_state = { "images": images, # 存储所有视频帧 "num_frames": len(images), "video_height": video_height, "video_width": video_width, "device": self.device, "point_inputs_per_obj": {}, # 每帧对象的点击输入 "mask_inputs_per_obj": {}, # 每帧对象的掩膜输入 "output_dict_per_obj": {}, # 追踪结果(掩膜、记忆特征) "obj_id_to_idx": OrderedDict(), # 对象ID到内部索引的映射 "obj_idx_to_id": OrderedDict(), "obj_ids": [] } # 预热第一帧的图像编码器 self._get_image_feature(inference_state, frame_idx=0, batch_size=1) return inference_state说明 :
init_state设置inference_state字典,加载视频帧,存储原始尺寸,并初始化对象数据和追踪结果的存储区。它还预处理第一帧以确保模型就绪。 -
添加初始提示(
add_new_points_or_box)pythondef add_new_points_or_box(self, inference_state, frame_idx, obj_id, points=None, labels=None, **kwargs): obj_idx = self._obj_id_to_idx(inference_state, obj_id) # 对象ID映射 # 存储点击输入 inference_state["point_inputs_per_obj"][obj_idx][frame_idx] = concat_points( inference_state["point_inputs_per_obj"][obj_idx].get(frame_idx, None), points, labels ) # 运行单帧推理(类似SAM2ImagePredictor) current_out, _ = self._run_single_frame_inference( inference_state=inference_state, output_dict=inference_state["output_dict_per_obj"][obj_idx], frame_idx=frame_idx, batch_size=1, is_init_cond_frame=True, # 标记为初始输入帧 point_inputs=inference_state["point_inputs_per_obj"][obj_idx][frame_idx], mask_inputs=None, reverse=False, run_mem_encoder=False, # 记忆编码器稍后运行 prev_sam_mask_logits=None, ) # 临时存储当前输出掩膜 inference_state["temp_output_dict_per_obj"][obj_idx]["cond_frame_outputs"][frame_idx] = current_out # 返回调整到原始视频分辨率的掩膜 consolidated_out = self._consolidate_temp_output_across_obj(inference_state, frame_idx, is_cond=True) _, video_res_masks = self._get_orig_video_res_output(inference_state, consolidated_out["pred_masks_video_res"]) return frame_idx, inference_state["obj_ids"], video_res_masks说明 :此方法将对象ID映射到内部索引,存储点击数据,并调用
_run_single_frame_inference生成单帧掩膜。结果掩膜临时存入inference_state,并返回调整后的掩膜。 -
传播分割(
propagate_in_video)pythondef propagate_in_video(self, inference_state, start_frame_idx=None, **kwargs): self.propagate_in_video_preflight(inference_state) # 预处理初始输入 for frame_idx in processing_order: # 按顺序处理每帧 pred_masks_per_obj = [] for obj_idx in range(batch_size): if frame_idx in obj_output_dict["cond_frame_outputs"]: current_out = obj_output_dict["cond_frame_outputs"][frame_idx] else: # 运行追踪推理 current_out, pred_masks = self._run_single_frame_inference( inference_state=inference_state, output_dict=obj_output_dict, frame_idx=frame_idx, batch_size=1, is_init_cond_frame=False, point_inputs=None, mask_inputs=None, reverse=False, run_mem_encoder=True, # 启用记忆编码器更新记忆 ) obj_output_dict["non_cond_frame_outputs"][frame_idx] = current_out pred_masks_per_obj.append(pred_masks) # 返回调整后的掩膜 all_pred_masks = torch.cat(pred_masks_per_obj, dim=0) _, video_res_masks = self._get_orig_video_res_output(inference_state, all_pred_masks) yield frame_idx, obj_ids, video_res_masks说明 :此方法预处理初始输入后,逐帧追踪对象。对于每帧,它调用
_run_single_frame_inference(启用记忆编码器),利用对象的历史记忆和当前帧特征预测新掩膜。结果掩膜调整后返回,形成连续追踪。
总结
SAM2VideoPredictor是一款复杂但用户友好的工具,将SAM-2强大的分割能力从单张图像扩展到整个视频
通过管理持久的inference_state并利用历史信息逐帧智能传播对象分割,将手动视频标注转变为高效的自动化过程。它是处理动态对象时间维度的理想解决方案。
现在,我们已经了解了SAM2ImagePredictor和SAM2VideoPredictor如何提供高级API与SAM-2交互,接下来让我们深入探索其核心智能:SAM2基础模型。