目录
[01 YOLO系列算法概览](#01 YOLO系列算法概览)
[02 One-stage与Two-stage检测方法对比](#02 One-stage与Two-stage检测方法对比)
[03 YOLO v1的核心思想](#03 YOLO v1的核心思想)
[04 目标检测的评价指标](#04 目标检测的评价指标)
[05 YOLO v1在性能对比中的表现](#05 YOLO v1在性能对比中的表现)
在当今计算机视觉领域,目标检测技术扮演着至关重要的角色,而YOLO系列算法作为其中的佼佼者,以其高效、快速的特性在工业界得到了广泛应用。今天,让我们一起深入探讨YOLO系列的开山之作------YOLO v1算法,了解其核心思想与技术精髓。
01 YOLO系列算法概览
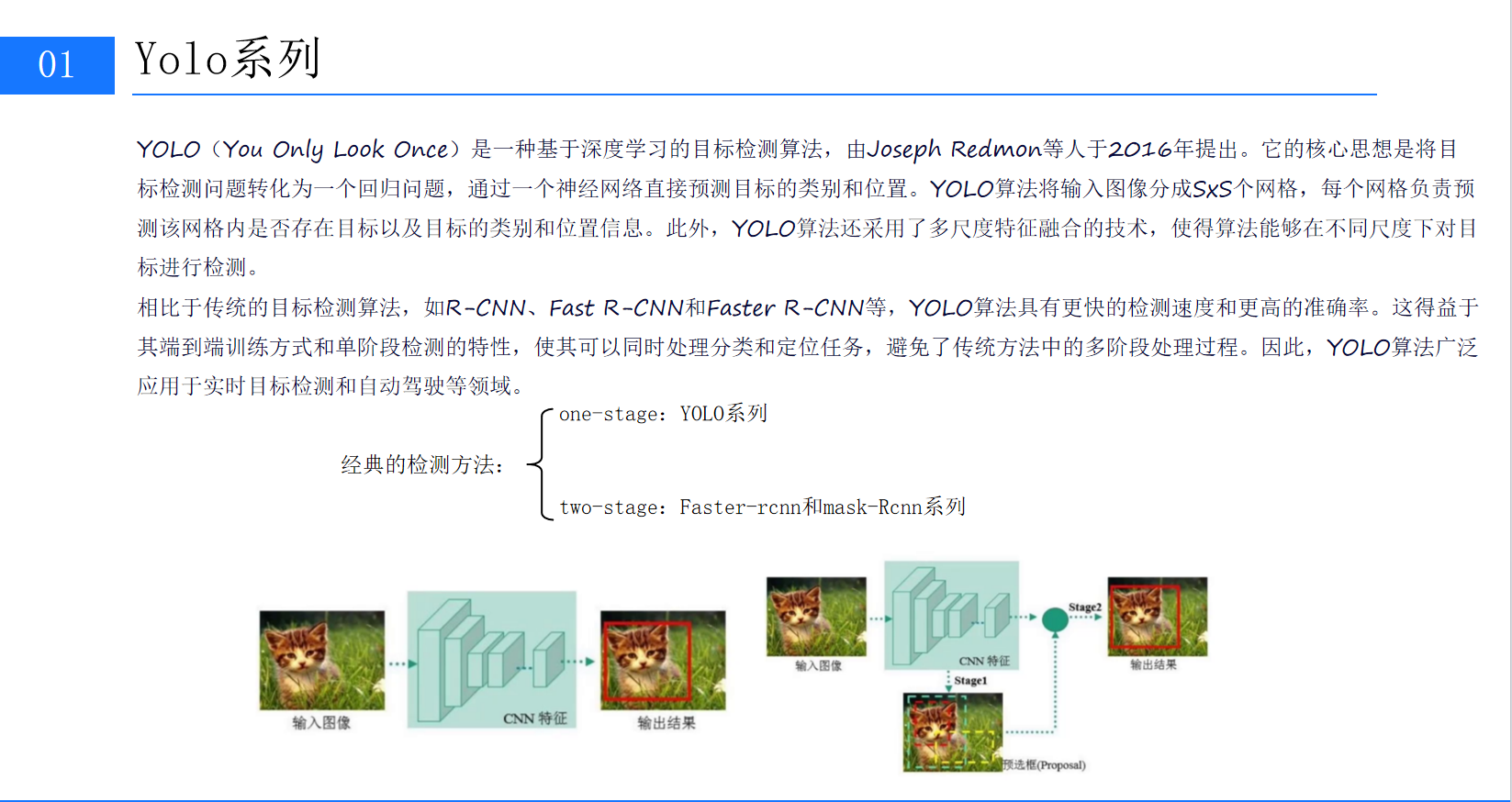
YOLO(You Only Look Once)是由Joseph Redmon等人在2016年提出的一种革命性的目标检测算法。与传统的目标检测方法不同,YOLO的核心创新在于将目标检测问题转化为一个回归问题,通过一个神经网络直接预测目标的类别和位置。
传统目标检测方法通常分为两大类:one-stage和two-stage方法。其中,YOLO系列属于one-stage检测器,而Faster R-CNN和Mask R-CNN系列则属于two-stage检测器。这种分类方式主要基于检测流程的差异。
02 One-stage与Two-stage检测方法对比
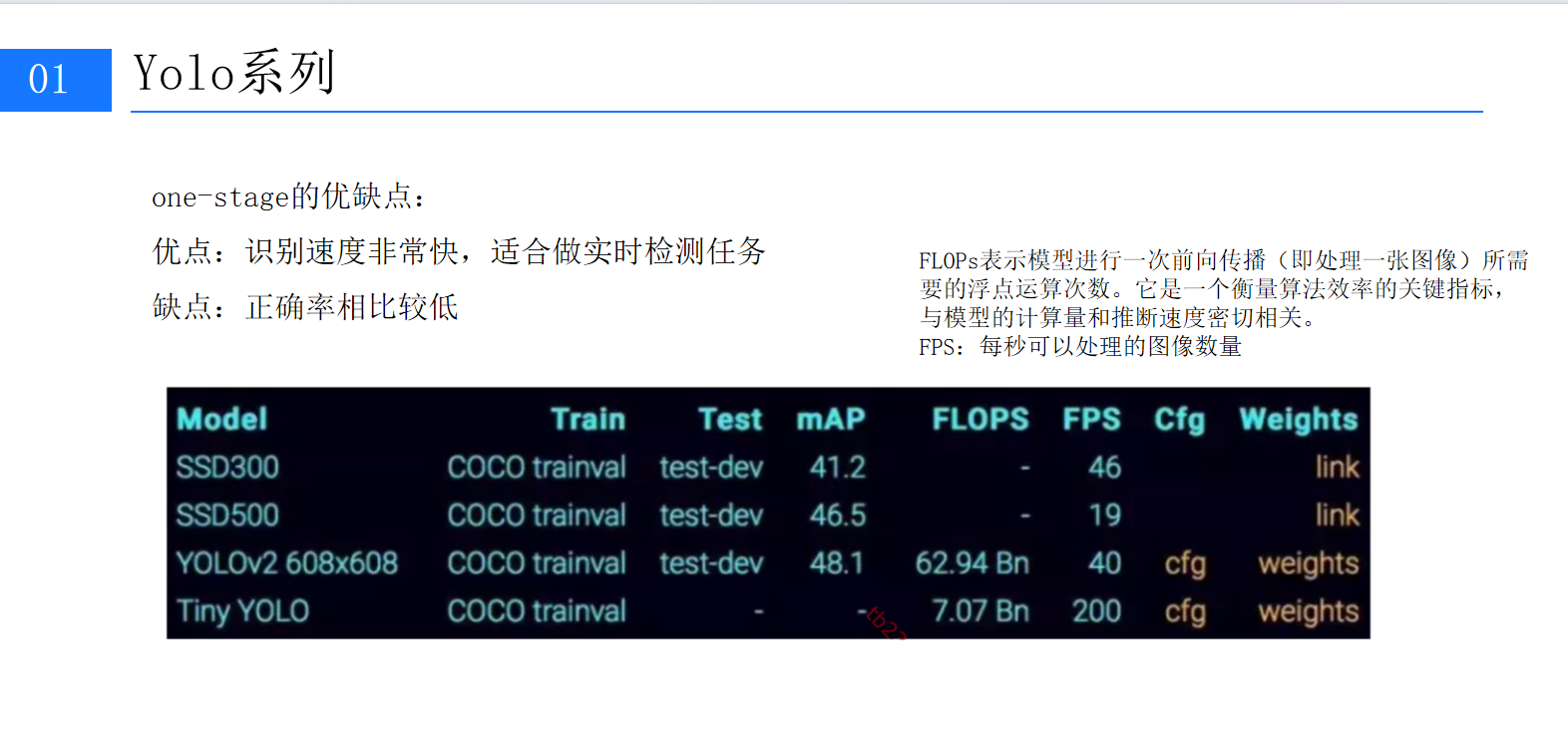
One-stage检测方法,如YOLO系列,最大的优势在于识别速度非常快,非常适合做实时检测任务。这类方法通过一个单一的神经网络直接预测目标的类别和位置,省去了中间环节,大大提高了检测效率。
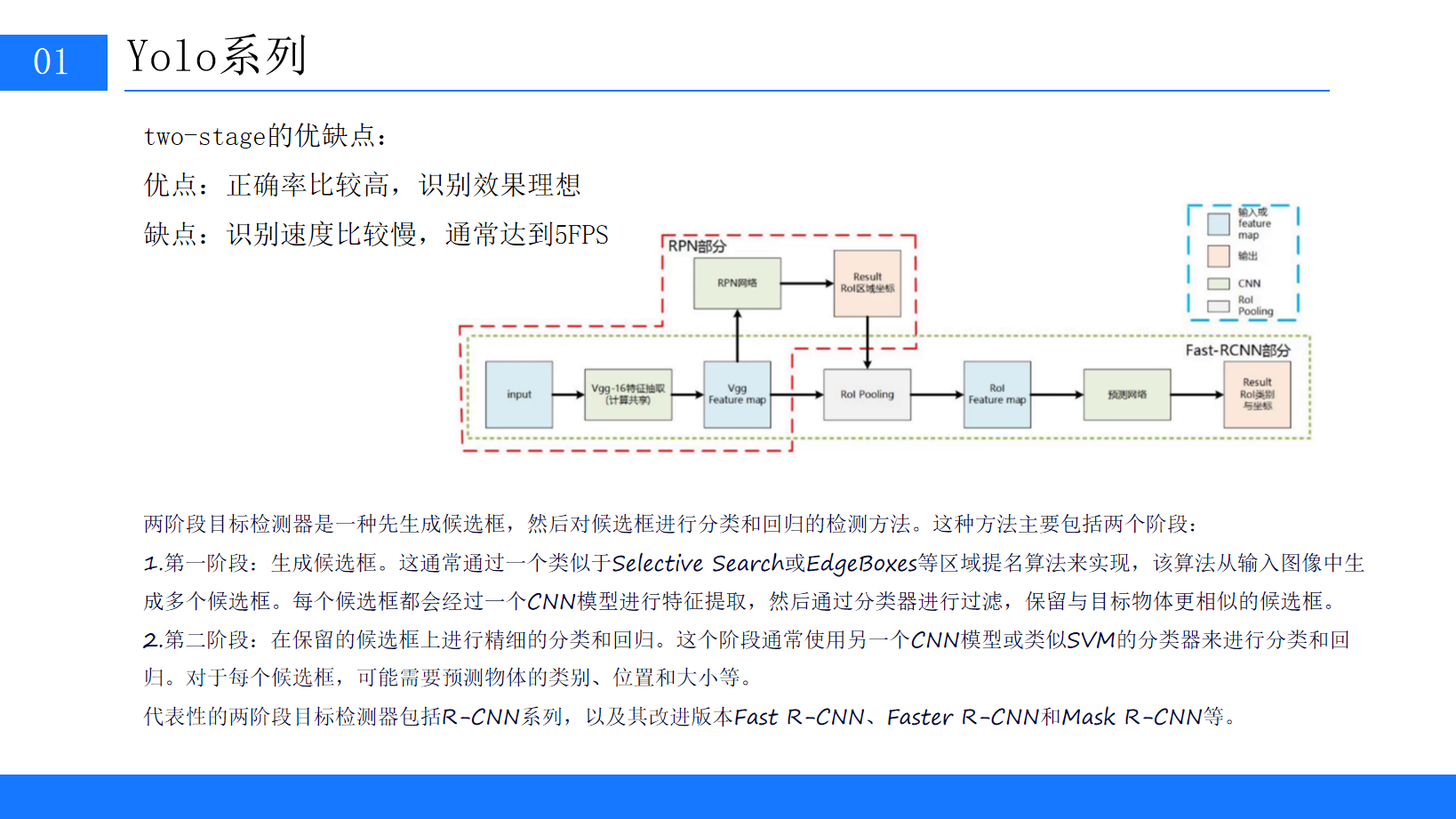
相比之下,Two-stage检测方法虽然正确率较高、识别效果理想,但识别速度较慢,通常只能达到5FPS左右。这类方法首先生成候选框,然后对这些候选框进行分类和回归,包含两个主要阶段:候选框生成和精细检测。
从实际应用角度看,YOLO系列算法在速度上有明显优势,这使得它们特别适合需要实时处理的场景,如视频监控、自动驾驶等。
03 YOLO v1的核心思想
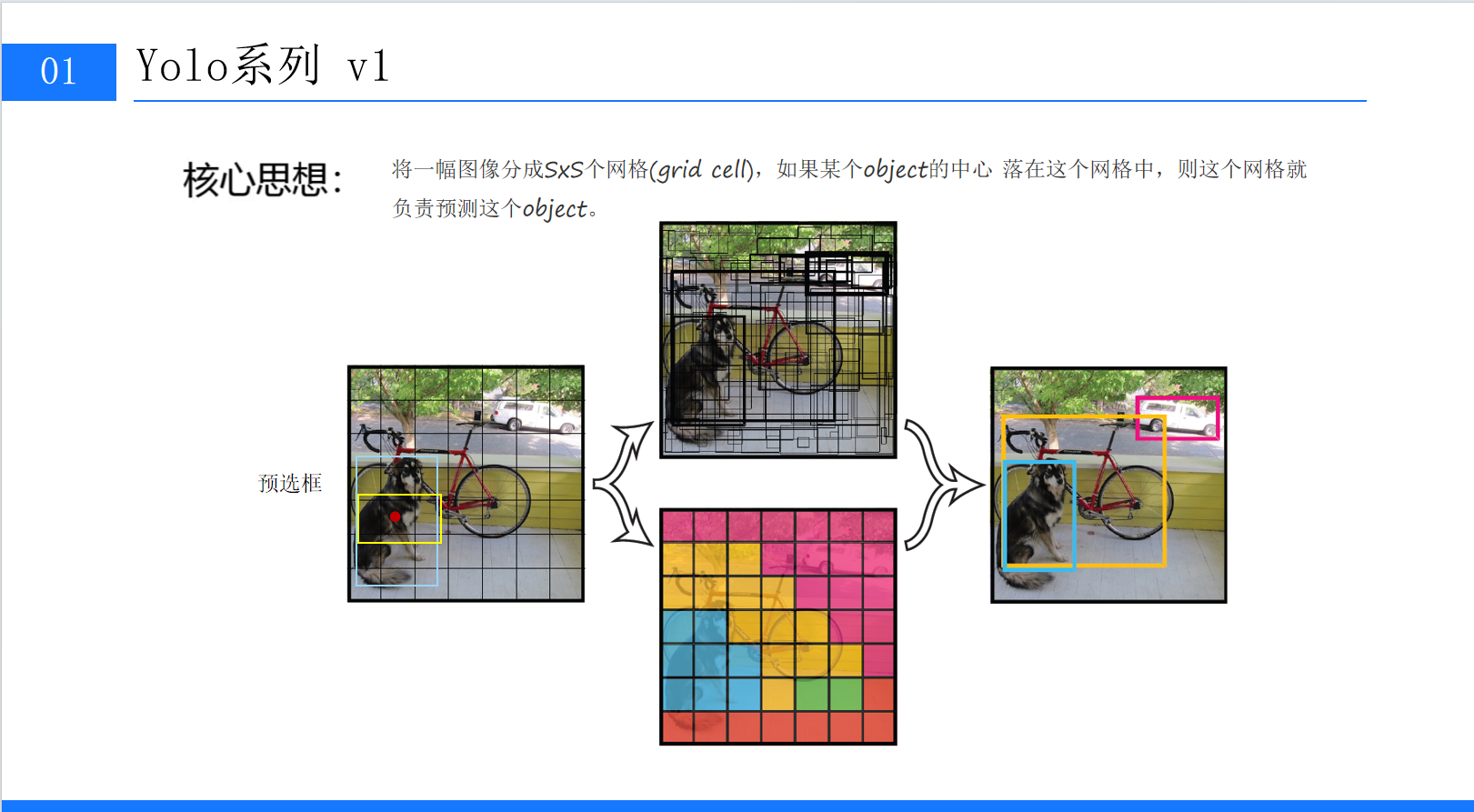
YOLO v1将目标检测问题重新定义为:给定一张输入图像,将图像划分为S×S个网格,每个网格负责预测该网格内是否存在目标以及目标的类别和位置信息。
这种设计思路的核心在于简化检测流程,将复杂的检测问题转化为一个可以直接通过卷积神经网络回归解决的问题。网络输出包含目标的边界框坐标(x, y, w, h)、置信度以及类别概率等信息。
04 目标检测的评价指标
要理解YOLO v1的性能,我们需要先了解目标检测中常用的评价指标。
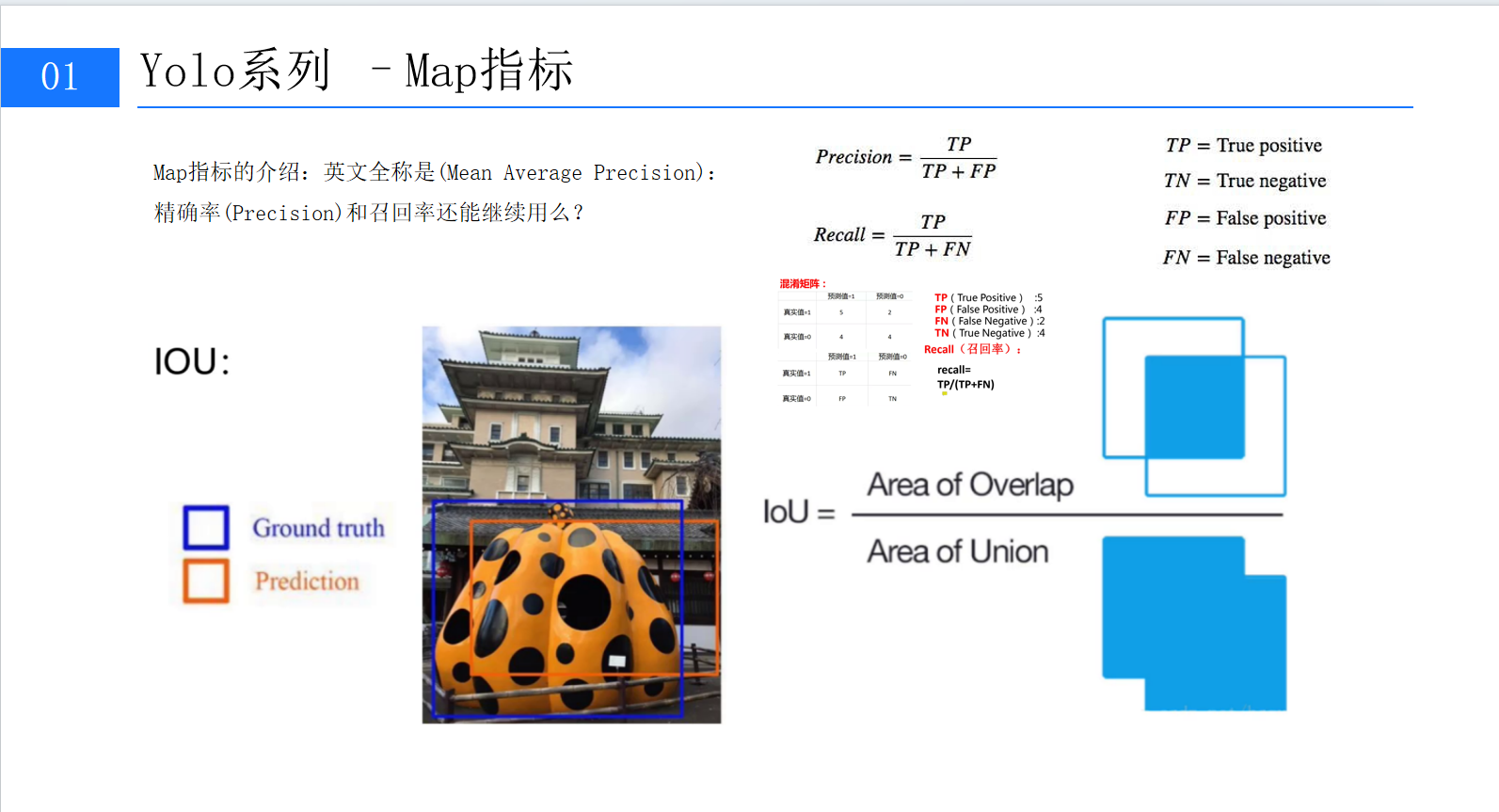
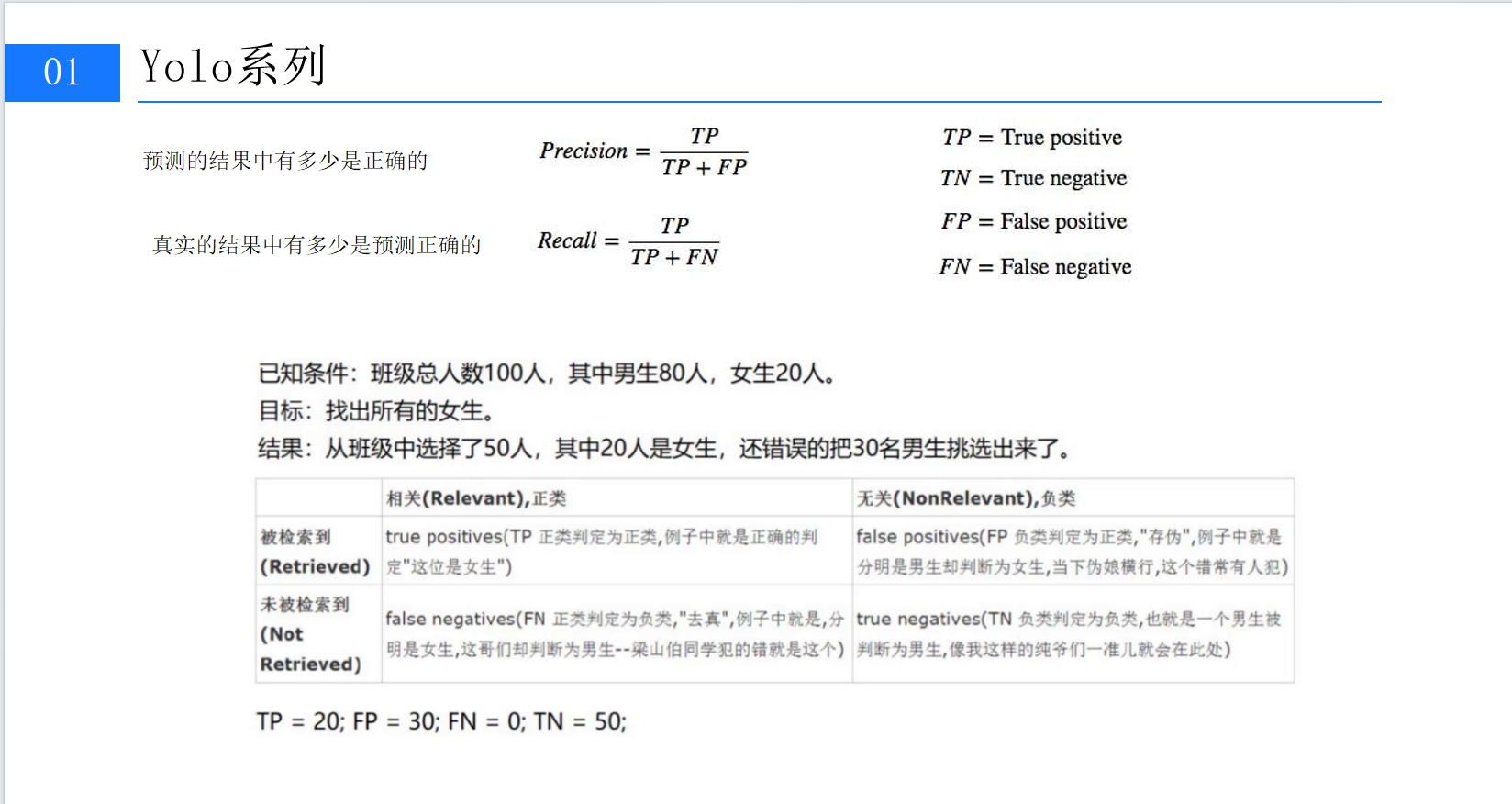
精确率(Precision)与召回率(Recall)
精确率衡量的是预测结果中正确部分的比例,而召回率则反映真实结果中被正确预测的比例。这两个指标通过混淆矩阵中的TP(真正例)、FP(假正例)、FN(假负例)、TN(真负例)来计算。
精确率公式为:Precision = TP / (TP + FP)
召回率公式为:Recall = TP / (TP + FN)
IOU(交并比)
IOU是评估预测框与真实框重合程度的重要指标,计算公式为:IOU = 面积交集 / 面积并集。在目标检测中,我们通常认为只有IOU大于0.5的预测框才是有价值的。
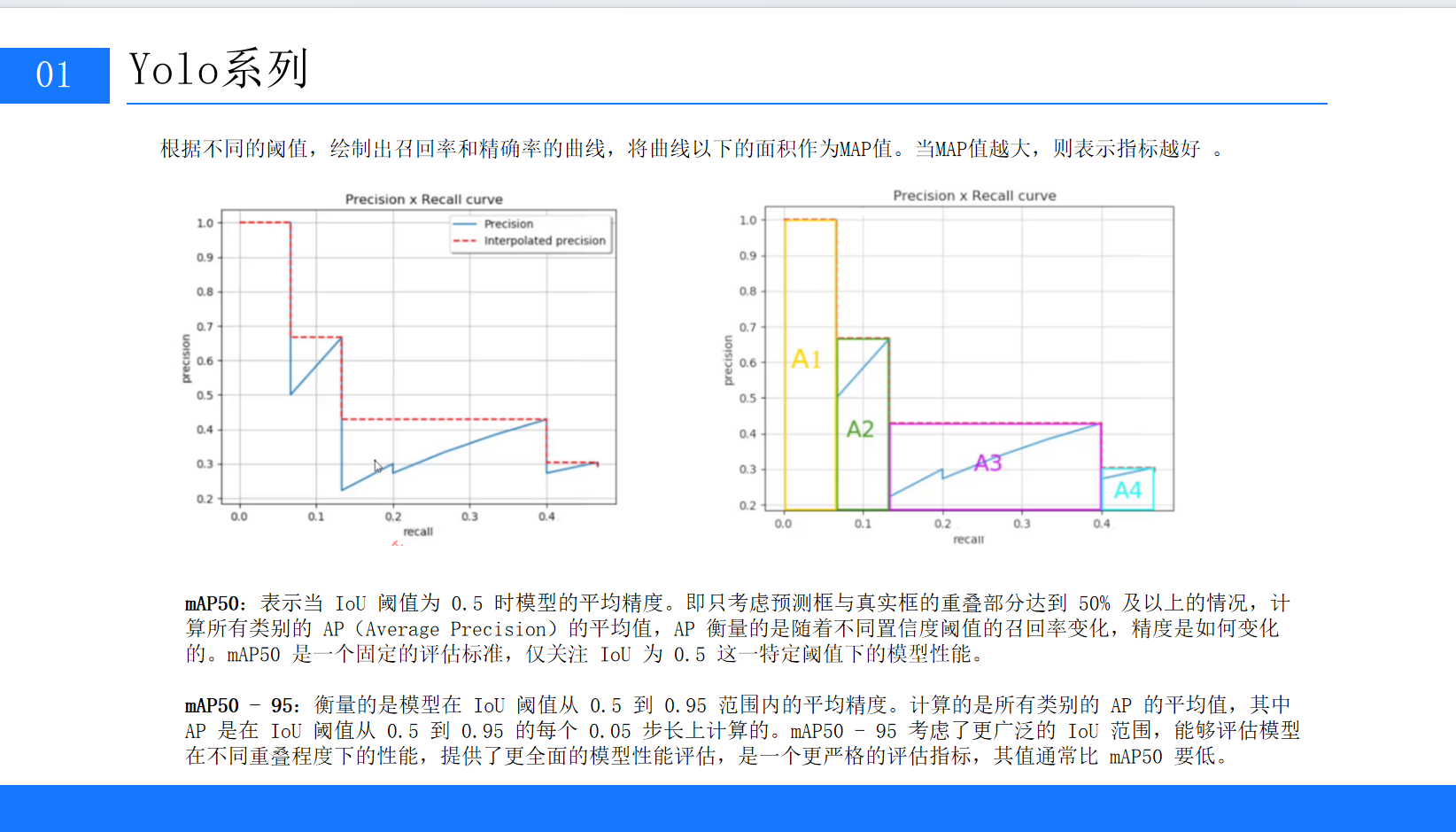
mAP(平均精度均值)
mAP是综合评估检测模型性能的关键指标。通过不同置信度阈值绘制精确率-召回率曲线,曲线下面积即为mAP值,该值越大代表模型性能越好。
常用的mAP指标包括:
-
mAP50:当IOU阈值为0.5时的平均精度
-
mAP50-95:IOU阈值从0.5到0.95范围内的平均精度,是更严格的评估标准


05 YOLO v1在性能对比中的表现
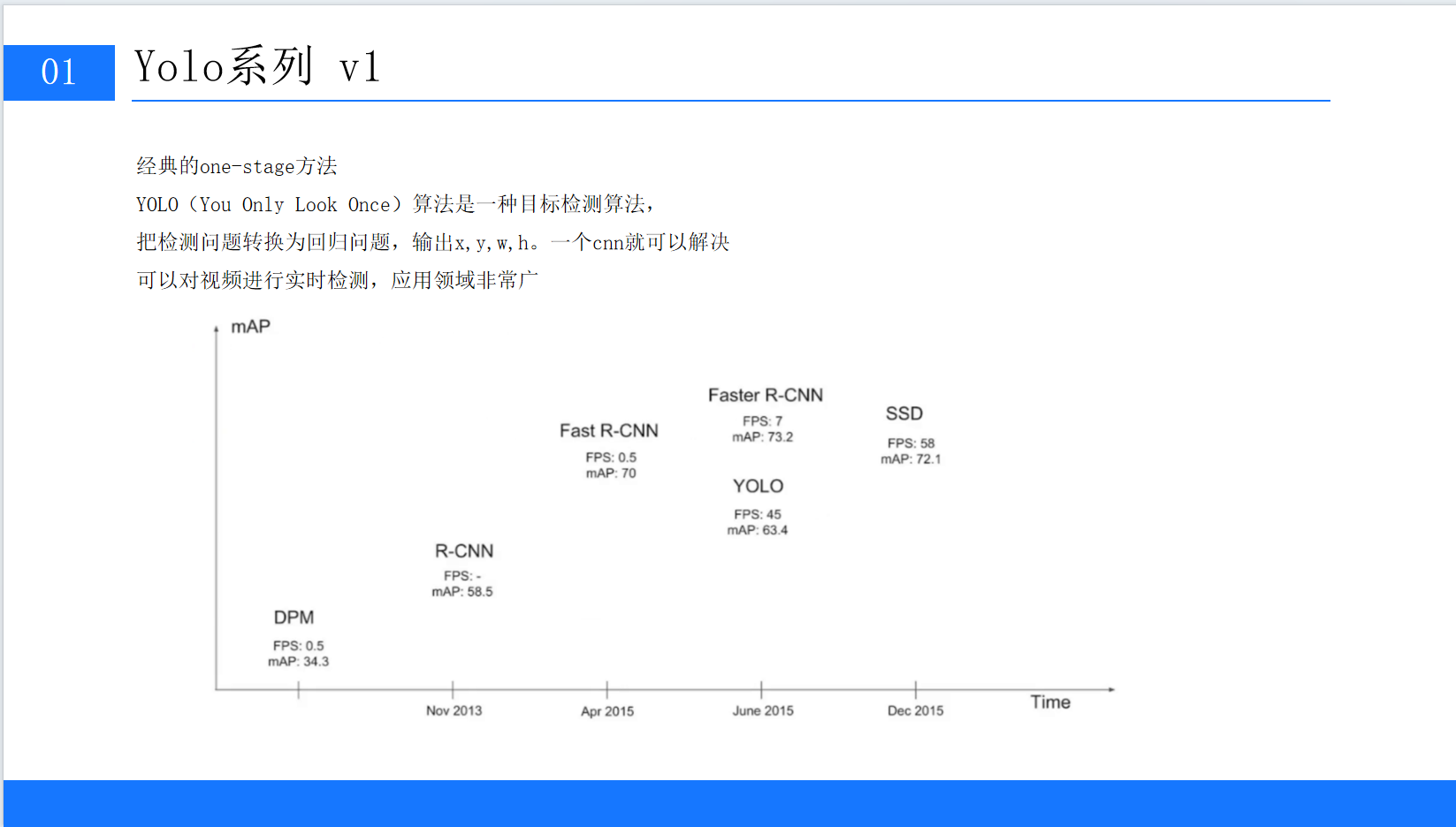
在目标检测算法的性能对比中,YOLO v1展现出了显著的速度优势。如图所示,在不同算法的FPS(每秒帧率)与mAP(平均精度)对比中,YOLO v1在2015年6月推出时,以45FPS的速度实现了63.4的mAP,这在当时是非常出色的表现。
相比之下,其他传统检测方法如DPM在2013年11月时仅有0.5FPS的速度和34.3的mAP。YOLO v1通过其独特的one-stage设计和高效的神经网络架构,在保持相对较高检测精度的同时,大幅提升了检测速度,为实时目标检测任务开辟了新的可能性。
总结
通过以上介绍,我们可以初步了解了one-stage和two-stage检测方法的优缺点,了解了目标检测的评价指标,为后续更加深入的了解yolo v1及后续算法打下了基础,做好了准备。
YOLO v1作为YOLO系列的开山之作,其核心创新在于将目标检测问题转化为回归问题,通过一个CNN网络直接预测目标的类别和位置。这种设计不仅简化了检测流程,还为后续更高效的检测算法奠定了基础。
在下一篇文章中,我们将深入探讨YOLO v1的网络架构、具体实现细节以及其在实际应用中的表现,进一步揭示这一革命性算法的技术魅力。
(本文基于人工智能目标检测相关技术资料整理,展示了YOLO v1算法的核心思想与技术特点,为理解这一经典算法提供了系统性的介绍。)