第2章:强化学习工作流(DPPO)
欢迎回来
在VT-Refine项目中,我们了解到VT-Refine就像一所机器人训练学院,而它让机器人变得超级精确的秘诀是一个称为"微调"的过程。但这个"微调"具体是如何发生的?机器人如何从一个任务表现平平变成专家?
本章将介绍VT-refine为机器人设计的"训练计划"或"课程",即**强化学习工作流(DPPO)**。可以把它想象成一个多阶段的教育计划,旨在教会机器人复杂的技能。
这个工作流解决了什么问题?(机器人的学习之旅)
想象一下,想教机器人完成一项非常具体且精细的任务,比如小心翼翼地将一根微型USB-C线插入接口,或者用恰到好处的力量组装两块复杂的乐高积木。
这不仅仅是移动手臂的问题;它需要学习最佳的动作序列、施加多少力量,以及如何根据所见所感做出反应。
这就是**强化学习工作流(DPPO)**的用武之地。它为VT-Refine训练和优化机器人技能提供了一个结构化的"配方"。就像教练通过练习、比赛和表现评估来指导运动员不断进步一样。
强化学习:通过实践学习
我们工作流的核心是一种强大的学习方法------强化学习(RL)。
- 强化学习(RL) :想象教狗一个新把戏。当狗做对了,你会给它一块零食("奖励")。如果做错了,它得不到零食,甚至可能听到一声轻轻的"不"("惩罚"或没有奖励)。久而久之,狗会学会哪些动作能带来零食,哪些不能。
- 在RL中,机器人就像狗("智能体")。
- 虚拟世界(或现实世界)就像狗表演的环境("环境")。
- 机器人尝试不同的动作,获得"奖励"(比如成功放置零件)或"惩罚"(比如掉落零件),并利用这些反馈来改进。
- 机器人决定做什么的"大脑"称为**策略**。这个策略通常是一种特殊的计算机程序,称为
神经网络。
强化升级:分布式近端策略优化(DPPO)
现在,让我们看看工作流中的"DPPO"部分。
-
近端策略优化(PPO) :这是一种非常流行且高效的算法(一组指令),用于智能地更新机器人的"大脑"(策略)。它的设计目的是快速学习,同时避免对机器人行为做出剧烈且适得其反的改变。可以把它想象成一位教练,给运动员提供建设性的反馈,确保改进是稳定且不冒险的。
-
分布式PPO(DPPO) :"D"代表分布式。想象你想更快地训练你的狗。如果不止一个训练师,而是10个训练师,每个在自己的院子里同时训练10只不同的狗学习同一个把戏呢?它们共享所学,使整体训练更快、更高效。
- 在我们的案例中,"分布式"意味着我们使用许多并行仿真环境 (就像许多虚拟院子)同时训练机器人的策略。这显著加快了学习过程。我们将在仿真平台(Isaac Gym & easysim-envs)中更深入地探讨这些仿真环境。
因此,**强化学习工作流(DPPO)**是VT-Refine使用的一种复杂的分布式学习算法来训练机器人的完整系统。
机器人训练的三个阶段:预训练、微调和评估
我们的DPPO工作流结构像一个多阶段的课程,从通用知识到专业技能,再到最终考核。
让我们看看这些阶段,以及如何使用VT-Refine的命令与它们交互。所有这些命令都在第1章启动的Docker容器中运行。
阶段1:预训练(通识教育)
-
是什么:在这个初始阶段,机器人通过练习多样化的任务和数据集学习广泛的技能。就像一个学生通过通识教育课程学习基础概念,这些知识在许多领域都有用。对于VT-Refine来说,这通常意味着从各种人类演示或更简单的任务中学习。这一阶段帮助机器人在应对具体挑战之前打下良好的基础。
-
为什么重要:它提供了一个强大的起点,使后续更具体的微调更快、更有效。
-
如何运行(示例):
bashpython3 dppo/script/run.py \ --config-name=pre_tactile \ --config-path=../cfg/aloha/pretrain/00186- 这个命令的作用 :启动预训练过程。
python3 dppo/script/run.py:这是启动任何DPPO训练或评估的主脚本。dppo文件夹实际上是VT-Refine用于强化学习的一个独立项目。--config-name=pre_tactile:告诉脚本使用专门为触觉(触摸)信息预训练的配置设置。--config-path=../cfg/aloha/pretrain/00186:指向一个特定的配置文件。可以把这个文件想象成一个详细的课程计划,指定预训练阶段学什么 (比如使用"Aloha"机器人数据)和如何学。
- 输出 :运行时,终端会显示大量文本滚动,机器人正在练习。DPPO(通过
dppo项目)会自动将机器人不断演化的"大脑"(策略)保存到日志文件夹,如果设置了DPPO_WANDB_ENTITY(如第1章所述),还可以将进度报告发送到Weights & Biases等工具。
- 这个命令的作用 :启动预训练过程。
阶段2:微调(专业课程)
-
是什么 :一旦机器人通过预训练打下了良好的基础,就进入微调阶段。在这里,机器人利用仿真环境中的精确视觉和触觉反馈,将其学到的技能适应非常具体的目标任务。就像一个学生选修专业课程,为特定职业路径磨练技能。
-
为什么重要:这是VT-Refine让机器人对复杂双手装配任务变得极其精确的地方。它利用预训练的基础,快速成为新任务的专家。
-
如何运行(示例):
bash# 重要:将$PRETRAIN_POLICY_PATH替换为预训练策略的实际路径! # 示例:/root/vt-refine/log/your_pretrain_run_id/policy_last.pth python3 dppo/script/run.py \ --config-name=ft_tactile \ --config-path=../cfg/aloha/finetune/00186 \ base_policy_path=$PRETRAIN_POLICY_PATH- 这个命令的作用 :启动微调过程。
--config-name=ft_tactile:指定用于触觉反馈微调的配置。--config-path=../cfg/aloha/finetune/00186:指向这个特定"Aloha"任务的微调课程计划。base_policy_path=$PRETRAIN_POLICY_PATH:**这很关键!**它告诉脚本从预训练阶段学到的机器人"大脑"(策略)开始微调。这比从头开始节省了大量时间。
- 输出:与预训练类似,会看到持续的日志,更新后的微调策略会被保存。
- 这个命令的作用 :启动微调过程。
阶段3:评估(期末考试)
-
是什么:预训练和微调之后,是时候看看机器人学得怎么样了!评估阶段严格测试机器人在目标任务上的表现。就像一个学生参加期末考试来展示掌握程度。
-
为什么重要:这一阶段衡量训练过程的成功,并为你提供机器人策略能力的定量结果。
-
如何运行(示例):
bash# 重要:将$FINETUNE_POLICY_PATH替换为微调策略的实际路径! # 示例:/root/vt-refine/log/your_finetune_run_id/policy_last.pth python3 dppo/script/run.py \ --config-name=eval_ft_tactile \ --config-path=../cfg/aloha/eval/00186 \ base_policy_path=$FINETUNE_POLICY_PATH- 这个命令的作用 :运行评估。
--config-name=eval_ft_tactile:指定用于微调触觉策略的评估配置。--config-path=../cfg/aloha/eval/00186:指向该任务的具体评估标准。base_policy_path=$FINETUNE_POLICY_PATH:告诉脚本评估哪个机器人"大脑"(策略)。
- 输出:与持续训练不同,你通常会看到机器人表现的摘要,比如多次试验的成功率,或基于任务完成情况的得分。
- 这个命令的作用 :运行评估。
🎢幕后:DPPO如何施展魔法
当运行这些python3 dppo/script/run.py命令时,实际发生了什么?让我们简单看看幕后。
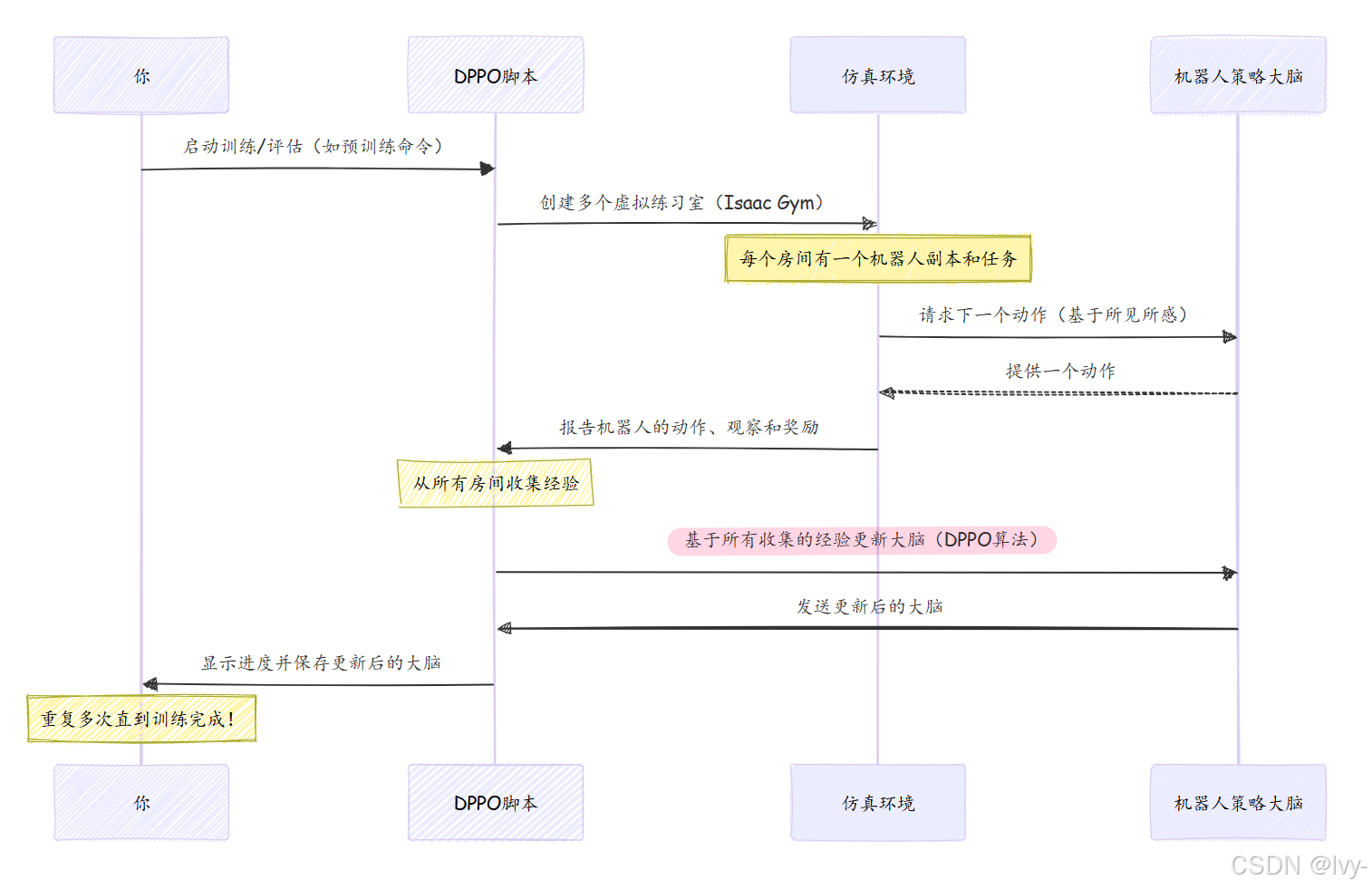
- 你发出命令:你告诉DPPO脚本做什么(预训练、微调或评估)以及使用哪个机器人任务配置。
- DPPO设置训练场 :DPPO系统加载机器人当前的"大脑"(策略),并使用仿真平台(Isaac Gym & easysim-envs)创建多个虚拟训练室(仿真)。每个房间有一个机器人和特定任务(比如组装"00186"物品)。
- 机器人开始练习:在每个虚拟房间中,机器人的副本尝试完成任务。它采取行动,观察结果(视觉和触觉),并获得奖励或惩罚。
- 从经验中学习 :从这些并行仿真中收集的所有经验被汇总。DPPO算法分析这些集体经验,并决定如何调整机器人的"大脑"(策略),以便下次做出更好的决策。
- 重复、重复、再重复:这个练习、观察和调整的循环会重复数百万次。随着时间的推移,机器人的策略变得更聪明,任务完成得更成功!
以下是简化的操作序列:
整个过程可以通过cfg目录中的文件(如cfg/aloha/pretrain/00186)高度配置。这些配置文件定义了从任务细节到学习率和奖励机制的一切。
总结
本章我们探索了强化学习工作流(DPPO),这是VT-Refine用于训练机器人的复杂多阶段课程。我们了解到:
- 它使用强化学习,机器人通过试错学习,由奖励引导。
- DPPO(分布式近端策略优化)是用于训练机器人"大脑"(策略)的具体高效算法,通过并行运行多个仿真实现。
- 工作流包含三个阶段:
- 预训练 :从多样化数据集中进行通用学习。
- 微调 :适应特定精确任务。
- 评估:测量最终表现。
现在理解了VT-Refine如何赋能机器人学习和优化复杂的双手装配技能。
接下来,我们将深入探讨所有这些学习实际发生的虚拟世界,探索仿真平台(Isaac Gym & easysim-envs)。