C# 基于halcon的视觉工作流-章54-N点标定
本章目标:
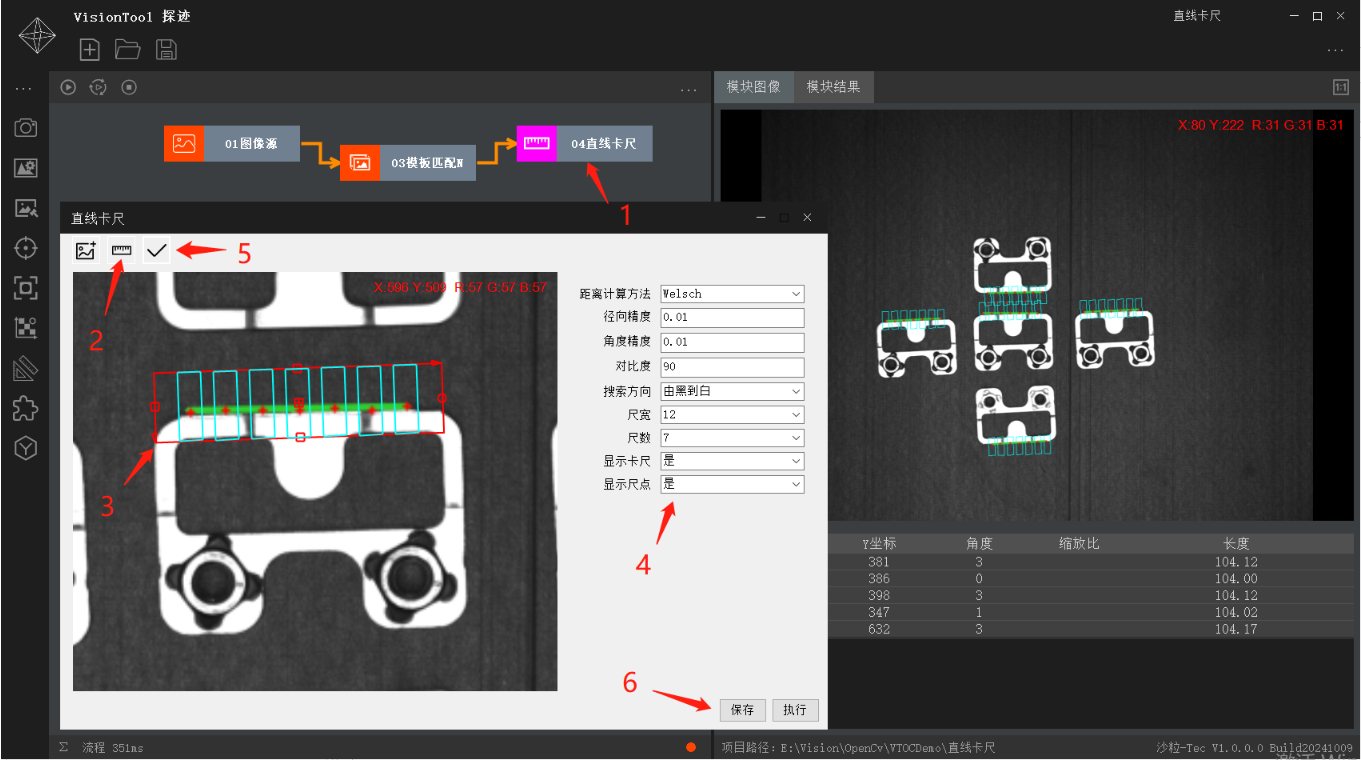
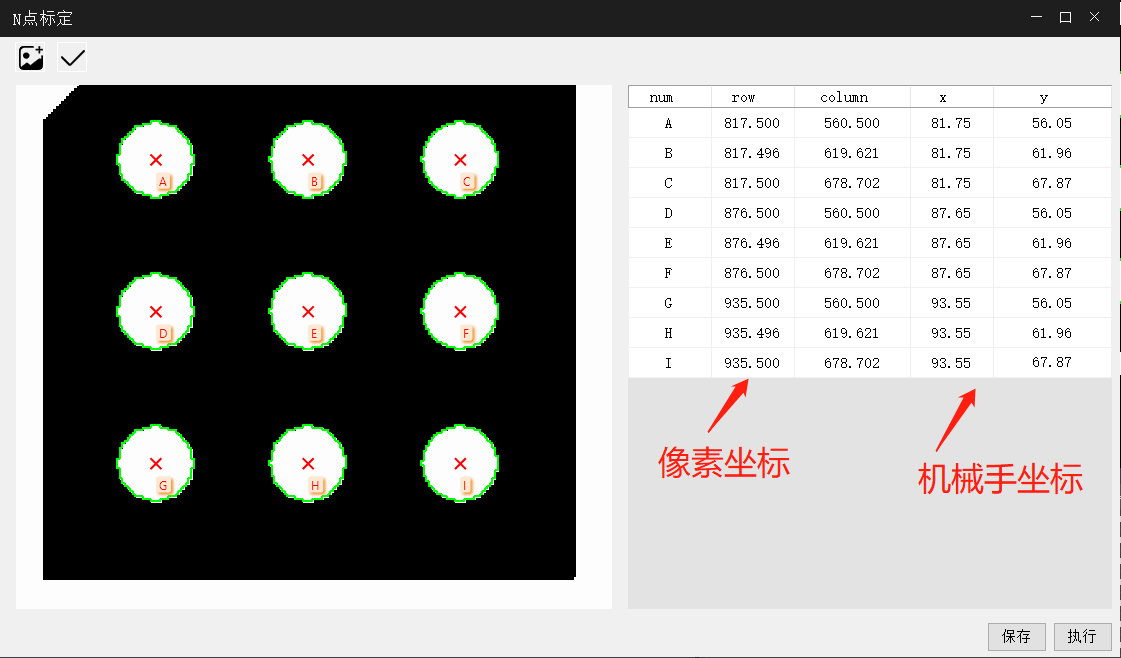
一、利用基础算子找出各圆点中心坐标;
二、输入机械手移到到圆点位置时的坐标;
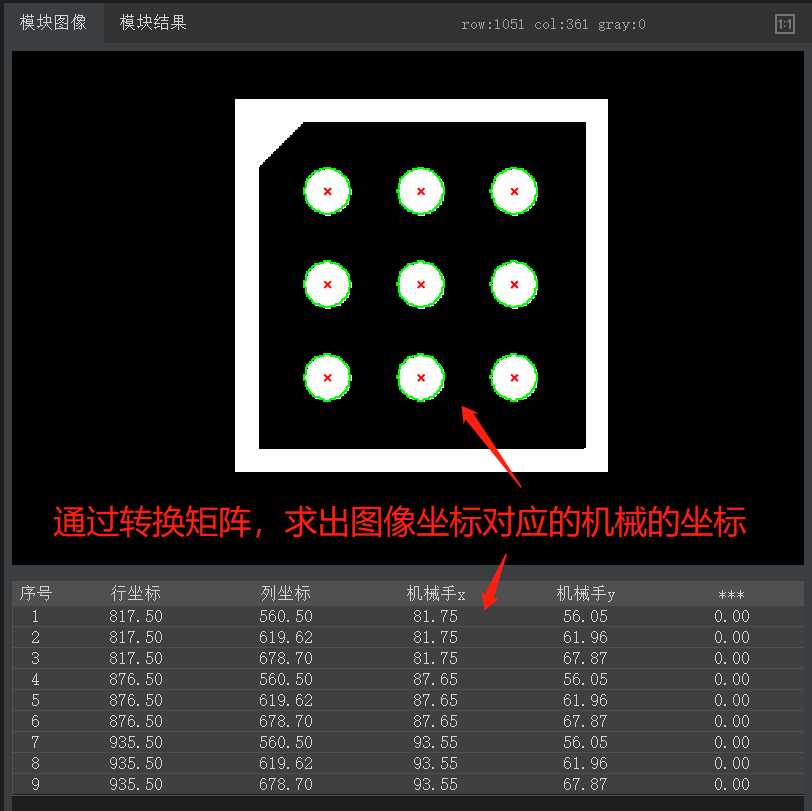
三、vector_to_hom_mat2d计算转换矩阵;
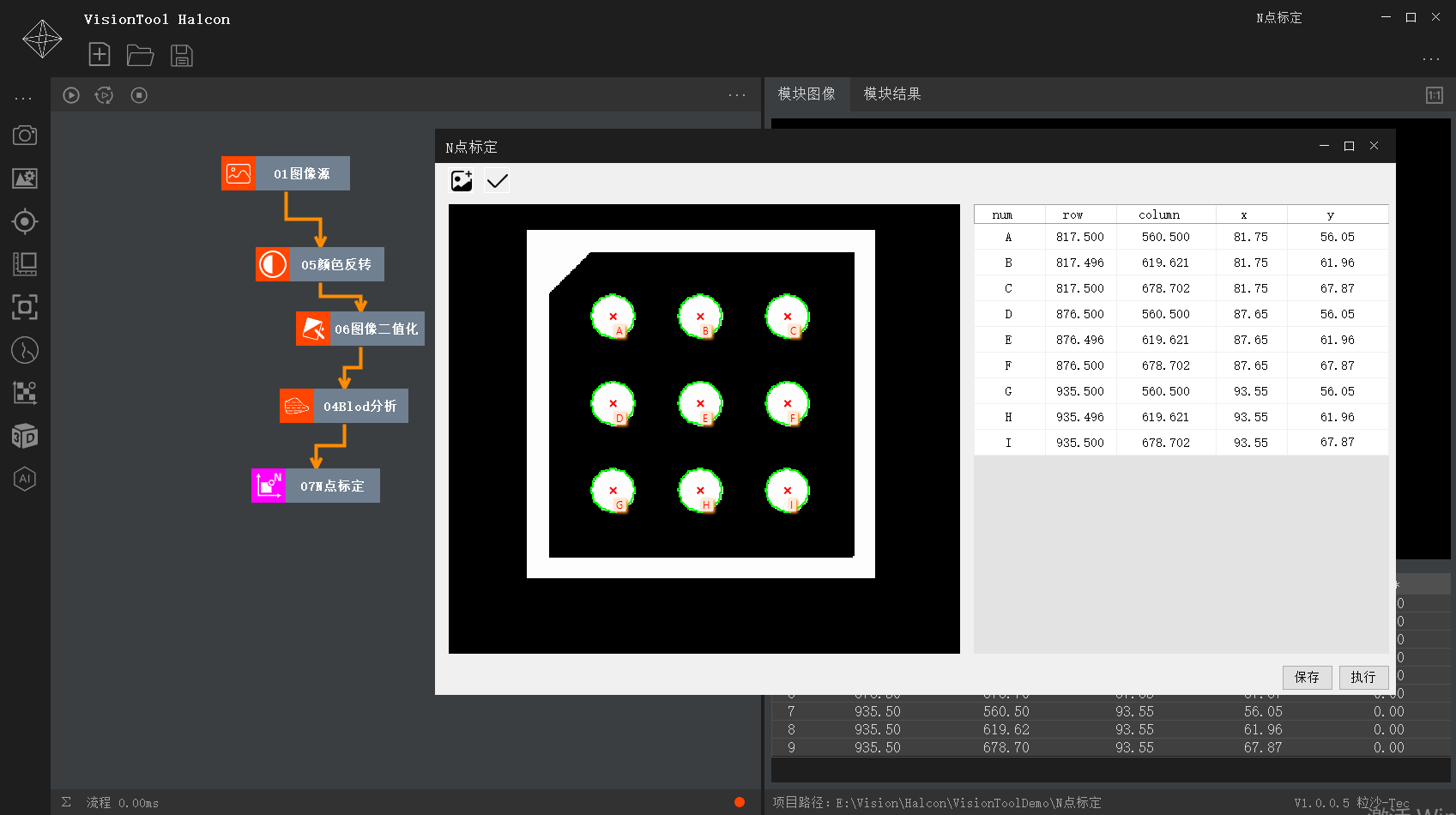
一、利用基础算子找出各圆点中心坐标;

二、输入机械手移到到圆点位置时的坐标;
三、vector_to_hom_mat2d计算转换矩阵;
利用该算子,输入图像坐标与机械手坐标,算出转换关系矩阵,用于机械手引导定位。
上述内容需要一定的技术功底,本章至此已结束,欢迎阅读下章。
一款免费的视觉工具
下载地址:https://pan.baidu.com/s/11tktKOSnepLNIEqNbvnv6w?pwd=qv5i