题目描述
坐落在 Bzeroth 大陆上的精灵王国击退地灾军团的入侵后,经过十余年的休养生息,重新成为了一片欣欣向荣的乐土,吸引着八方游客。小 W 是一位游历过世界各地的著名美食家,现在也慕名来到了精灵王国。
精灵王国共有 n 座城市,城市从 1 到 n 编号,其中城市 i 的美食能为小 W 提供 ci 的愉悦值。精灵王国的城市通过 m 条单向道路连接,道路从 1 到 m 编号,其中道路 i 的起点为城市 ui ,终点为城市 vi,沿它通行需要花费 wi 天。也就是说,若小 W 在第 d 天从城市 ui 沿道路 i 通行,那么他会在第 d+wi 天到达城市 vi。
小 W 计划在精灵王国进行一场为期 T 天的旅行,更具体地:他会在第 0 天从城市 1 出发,经过 T 天的旅行,最终在恰好第 T 天 回到城市 1 结束旅行。由于小 W 是一位美食家,每当他到达一座城市时(包括第 0 天和第 T 天的城市 1),他都会品尝该城市的美食并获得其所提供的愉悦值,若小 W 多次到达同一座城市,他将获得多次愉悦值 。注意旅行途中小 W 不能在任何城市停留,即当他到达一座城市且还未结束旅行时,他当天必须立即从该城市出发前往其他城市。
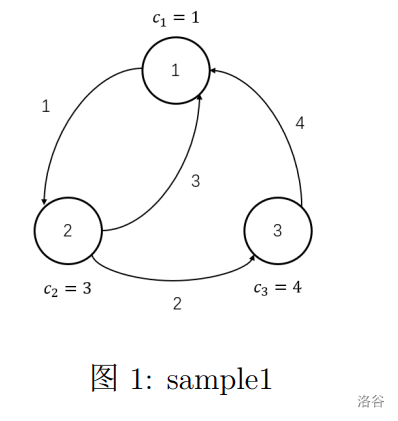
对于上图,小 W 一种为期 11 天的可行旅游方案为 1→2→1→2→3→1:
- 第 0 天,小 W 从城市 1 开始旅行,获得愉悦值 1 并向城市 2 出发。
- 第 1 天,小 W 到达城市 2,获得愉悦值 3 并向城市 1 出发。
- 第 4 天,小 W 到达城市 1,获得愉悦值 1 并向城市 2 出发。
- 第 5 天,小 W 到达城市 2,获得愉悦值 3 并向城市 3 出发。
- 第 7 天,小 W 到达城市 3,获得愉悦值 4 并向城市 1 出发。
- 第 11 天,小 W 到达城市 1,获得愉悦值 1 并结束旅行。
- 小 W 在该旅行中获得的愉悦值之和为 13。
此外,精灵王国会在不同 的时间举办 k 次美食节。具体来说,第 i 次美食节将于第 ti 天在城市 xi 举办,若小 W 第 ti 天时恰好在城市 xi,那么他在品尝城市 xi 的美食时会额外得到 yi 的愉悦值。现在小 W 想请作为精灵王国接待使者的你帮他算出,他在旅行中能获得的愉悦值之和的最大值。
输入格式
从标准输入中读入数据。
第一行四个整数 n,m,T,k,依次表示城市数、道路条数、旅行天数与美食节次数。
第二行 n 个整数 ci,表示每座城市的美食所能提供的愉悦值。接下来 m 行每行三个整数 ui,vi,wi,依次表示每条道路的起点、终点与通行天数。
最后 k 行每行三个整数 ti,xi,yi,依次表示每次美食节的举办时间、举办城市与提供的额外愉悦值。
本题中数据保证:
- 对所有 1≤i≤m,有 ui=vi。但数据中可能存在路线重复的单向道路,即可能存在 1≤i<j≤m,使得ui=uj,vi=vj。
- 对每座城市都满足:至少存在一条以该该城市为起点的单向道路。
- 每次美食节的举办时间 ti 互不相同。
输出格式
输出到标准输出中。
仅一行一个整数,表示小 W 通过旅行能获得的愉悦值之和的最大值。
若小 W 无法在第 T 天回到城市 1,则输出 −1。
输入输出样例
输入 #1复制
3 4 11 0
1 3 4
1 2 1
2 1 3
2 3 2
3 1 4输出 #1复制
13输入 #2复制
4 8 16 3
3 1 2 4
1 2 1
1 3 1
1 3 2
3 4 3
2 3 2
3 2 1
4 2 1
4 1 5
3 3 5
1 2 5
5 4 20输出 #2复制
39说明/提示
样例 1 解释
该样例为题目描述中的例子,最优旅行方案见题目描述。
样例 2 解释
最优方案为 1→3→4→2→3→4→1。
- 第 0 天,小 W 从城市 1 开始旅行,获得愉悦值 3 并沿道路 3 通行。
- 第 2 天,小 W 到达城市 3,获得愉悦值 2 并沿道路 4 通行。
- 第 5 天,小 W 到达城市 4,由于美食节获得愉悦值 20+4 并沿道路 7 通行。
- 第 6 天,小 W 到达城市 2,获得愉悦值 1 并沿道路 5 通行。
- 第 8 天,小 W 到达城市 3,获得愉悦值 2 并沿道路 4 通行。
- 第 11 天,小 W 到达城市 4,获得愉悦值 4 并沿道路 8 通行。
- 第 16 天,小 W 到达城市 1,获得愉悦值 3 并结束旅行。
- 小 W 获得的愉悦值之和为 39。
样例 3
见选手目录下的 delicacy/delicacy3.in 与 delicacy/delicacy3.ans。
该样例满足 k=0
测试点约束
对于所有测试点:
1≤n≤50,n≤m≤501,0≤k≤200,1≤ti≤T≤109。
1≤wi≤5,1≤ci≤52501,1≤ui,vi,xi≤n,1≤yi≤109。
每个测试点的具体限制见下表:
| 测试点编号 | n | m | T | 特殊限制 |
|---|---|---|---|---|
| 1∼4 | ≤5 | ≤50 | ≤5 | 无 |
| 5∼8 | ≤50 | ≤50 | ≤52501 | 无 |
| 9∼10 | ≤50 | ≤50 | ≤109 | A |
| 11∼13 | ≤50 | ≤50 | ≤109 | k=0 |
| 14∼15 | ≤50 | ≤50 | ≤109 | k≤10 |
| 16∼17 | ≤50 | ≤50 | ≤109 | 无 |
| 18∼20 | ≤50 | ≤501 | ≤109 | 无 |
特殊限制 A:n=m 且 ui=i,vi=(imodn)+1。
附件下载
delicacy.zip1.19KB
代码实现:
#include <bits/stdc++.h>
#define LL long long
using namespace std;
const int N = 50, M = 505, K = 205, V = 250;
const LL INF = 1ll << 60;
int L; // 矩阵维度
// 矩阵结构体(用于转移)
struct Mat {
LL a[V][V];
inline void init() { // 初始化矩阵为负无穷
for (int i = 0; i < L; ++i)
for (int j = 0; j < L; ++j)
a[i][j] = -INF;
}
};
// 向量结构体(用于状态存储)
struct Vec {
LL a[V];
inline void init() { // 初始化向量为负无穷
for (int i = 0; i < L; ++i)
a[i] = -INF;
}
};
// 矩阵乘法(最大值卷积)
Mat operator*(const Mat A, const Mat B) {
static Mat T;
T.init();
for (int k = 0; k < L; ++k)
for (int i = 0; i < L; ++i)
for (int j = 0; j < L; ++j)
T.a[i][j] = max(T.a[i][j], A.a[i][k] + B.a[k][j]);
return T;
}
// 矩阵乘向量(状态转移)
Vec operator*(const Mat A, const Vec B) {
static Vec T;
T.init();
for (int i = 0; i < L; ++i)
for (int j = 0; j < L; ++j)
T.a[i] = max(T.a[i], A.a[j][i] + B.a[j]);
return T;
}
int n, m, T, k, c[N]; // n:地点数 m:边数 T:总时间 k:事件数 c:地点基础值
int ex[M], ey[M], ez[M]; // 边信息:起点 终点 权重
Mat I, Tr, A[30]; // I:单位矩阵 Tr:转移矩阵 A:矩阵幂缓存
Vec st; // 状态向量
int nowt; // 当前时间
int id[N][5]; // 状态编号:地点×时间阶段
// 事件结构体
struct Ev {
int t, x, y; // t:时间 x:地点 y:附加值
} ev[K];
int main() {
// freopen("delicacy.in","r",stdin);
// freopen("delicacy.out","w",stdout);
int i, j;
cin >> n >> m >> T >> k;
I.init();
L = n * 5; // 维度=地点数×5(时间阶段)
// 读入地点基础值
for (i = 0; i < n; ++i)
cin >> c[i];
// 初始化单位矩阵
for (i = 0; i < n; ++i)
I.a[i][i] = 0;
// 状态编号映射:(地点, 时间阶段) → 唯一ID
for (i = 0; i < n; ++i)
for (j = 0; j < 5; ++j)
id[i][j] = j * n + i;
// 读入边信息
for (i = 1; i <= m; ++i) {
cin >> ex[i] >> ey[i] >> ez[i];
--ex[i]; // 转为0基
--ey[i];
}
// 初始化转移矩阵
Tr.init();
// 同一地点内的时间阶段转移
for (i = 0; i < n; ++i)
for (j = 1; j < 5; ++j)
Tr.a[id[i][j]][id[i][j-1]] = (j == 1) ? c[i] : 0;
// 跨地点的边转移
for (i = 1; i <= m; ++i)
Tr.a[id[ex[i]][0]][id[ey[i]][ez[i]-1]] = (ez[i] == 1) ? c[ey[i]] : 0;
// 预处理矩阵幂(二进制优化)
A[0] = Tr;
for (i = 1; i < 30; ++i)
A[i] = A[i-1] * A[i-1];
// 读入事件
for (i = 1; i <= k; ++i) {
cin >> ev[i].t >> ev[i].x >> ev[i].y;
--ev[i].x; // 转为0基
}
// 事件按时间排序
for (i = 1; i <= k; ++i)
for (j = i+1; j <= k; ++j)
if (ev[j].t < ev[i].t)
swap(ev[i], ev[j]);
// 补充终点时间事件
if (ev[k].t != T) {
++k;
ev[k].t = T;
ev[k].x = ev[k].y = 0;
}
// 初始状态:在起点(0号地点),时间阶段0
st.init();
st.a[id[0][0]] = c[0];
nowt = 0;
// 处理每个事件段
for (i = 1; i <= k; ++i) {
int dt = ev[i].t - nowt; // 时间差
// 用二进制幂加速转移
for (j = 0; j < 30; ++j)
if (dt >> j & 1)
st = A[j] * st;
// 累加事件附加值
if (st.a[ev[i].x] >= 0)
st.a[ev[i].x] += ev[i].y;
nowt = ev[i].t;
}
// 输出结果(若不可达输出-1)
cout << (st.a[0] < 0 ? -1 : st.a[0]) << '\n';
return 0;
}