摘要
本报告详细介绍了基于改进TransUNet架构的港口船只图像分割系统的设计与实现。
该系统结合了传统卷积神经网络与Transformer的优势,通过引入空间注意力机制和特征金字塔注意力模块,显著提升了港口复杂场景下船只分割的准确性和鲁棒性。
下载地址:基于transunet和transunet改进【空间注意力模块SA+特征金字塔+损失改进】分割系统:港口船只分割、已训练完成资源-CSDN下载
系统包含完整的训练框架和用户友好的图形界面,为港口船只监测提供了有效的技术解决方案。
1. 研究背景与意义
1.1 港口船只监测的重要性
港口作为国际贸易的重要枢纽,船只的精确监测与管理对于港口运营效率、安全监控和物流优化具有重要意义。传统的人工监测方式效率低下且容易出错,基于计算机视觉的自动分割技术能够提供实时、准确的船只检测结果。
1.2 图像分割技术挑战
港口环境下的船只分割面临诸多挑战:
-
复杂背景干扰:水面反射、天气变化、其他港口设施
-
尺度变化大:不同大小和类型的船只
-
遮挡问题:船只之间的相互遮挡、码头设施遮挡
-
实时性要求:需要快速处理大量监控视频流
2. 系统架构设计
2.1 整体架构概述
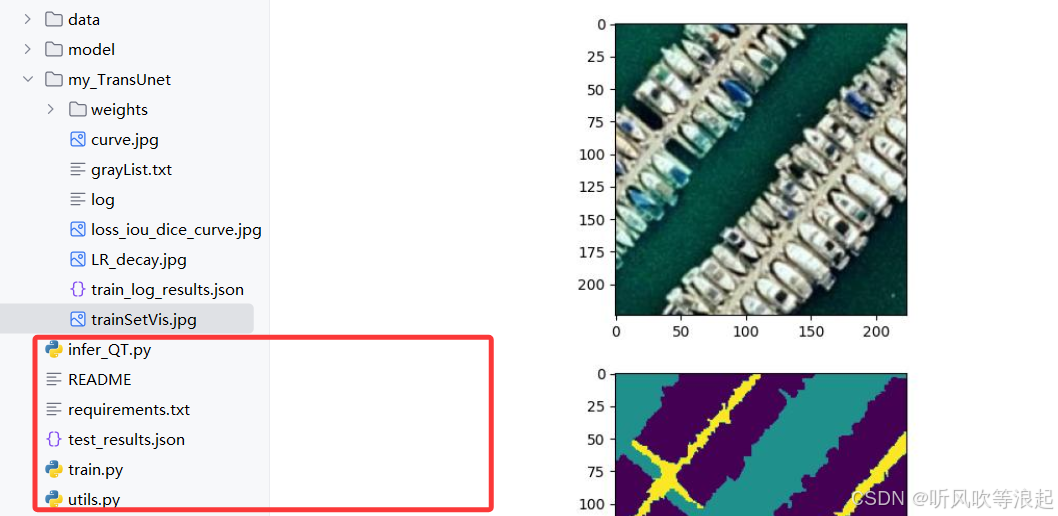
本系统采用模块化设计,主要包括四个核心组件:
-
数据预处理模块 (
utils.py) -
改进TransUNet网络架构 (
my_transunet.py,transunet.py) -
模型训练框架 (
train.py) -
图形化推理界面 (
infer_QT.py)
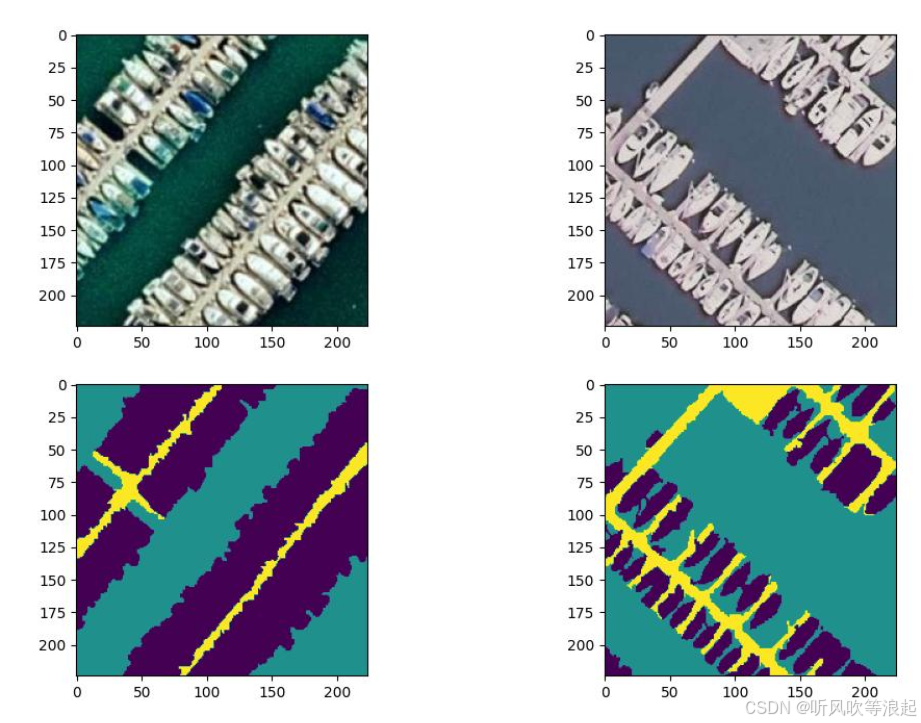
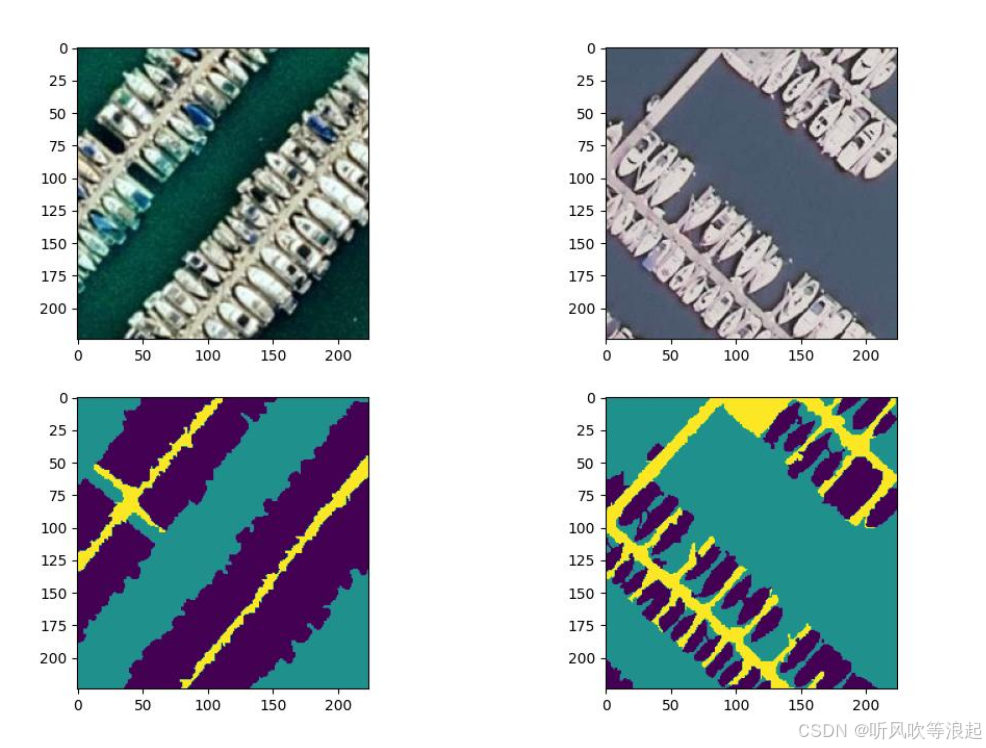
2.2 数据处理流程
系统实现了完整的数据处理流水线:
python
class MyDataset(Dataset):
def __init__(self, imgs_path, img_fm, mk_fm, txt_path, base_size=(256,256)):
# 初始化数据集参数
self.imgs = [os.path.join(imgs_path,i) for i in os.listdir(imgs_path)]
self.baseS = base_size
self.data_aug = True # 启用数据增强数据处理创新点:
-
自动灰度值计算:动态识别分割标签中的类别数量
-
智能数据增强:随机水平翻转和垂直翻转增强模型泛化能力
-
归一化处理:自适应图像归一化,提升训练稳定性
3. 核心算法创新与改进
3.1 TransUNet基础架构
TransUNet作为医学图像分割的先进模型,结合了CNN的局部特征提取能力和Transformer的全局上下文建模能力:
python
class TransUnet(nn.Module):
def __init__(self, *, img_dim=224, in_channels=3, classes=2,
vit_blocks=12, vit_heads=4, vit_dim_linear_mhsa_block=512):
# 编码器部分:类ResNet结构
self.init_conv = nn.Sequential(in_conv1, bn1, nn.ReLU(inplace=True))
self.conv1 = Bottleneck(self.inplanes, self.inplanes * 2, stride=2)
self.conv2 = Bottleneck(self.inplanes * 2, self.inplanes * 4, stride=2)
self.conv3 = Bottleneck(self.inplanes * 4, vit_channels, stride=2)
# Transformer编码器
self.vit = ViT(img_dim=self.img_dim_vit, in_channels=vit_channels, ...)
# 解码器部分:上采样恢复分辨率
self.dec1 = Up(1024, 256)
self.dec2 = Up(512, 128)
# ... 更多解码层3.2 主要创新点
3.2.1 空间注意力机制 (Spatial Attention)
在编码器的每个阶段引入空间注意力模块,增强对船只关键区域的关注:
python
class SpatialAttention(nn.Module):
def __init__(self, kernel_size=7):
super(SpatialAttention, self).__init__()
self.conv = nn.Conv2d(2, 1, kernel_size=kernel_size, padding=kernel_size//2)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
avg_out = torch.mean(x, dim=1, keepdim=True) # 平均池化
max_out, _ = torch.max(x, dim=1, keepdim=True) # 最大池化
x = torch.cat([avg_out, max_out], dim=1) # 通道拼接
x = self.conv(x) # 卷积融合
return self.sigmoid(x) # Sigmoid激活创新效果:
-
通过结合平均池化和最大池化,同时关注整体特征分布和显著特征
-
7×7卷积核能够捕获较大范围的上下文信息
-
自适应调整特征图各位置的重要性权重
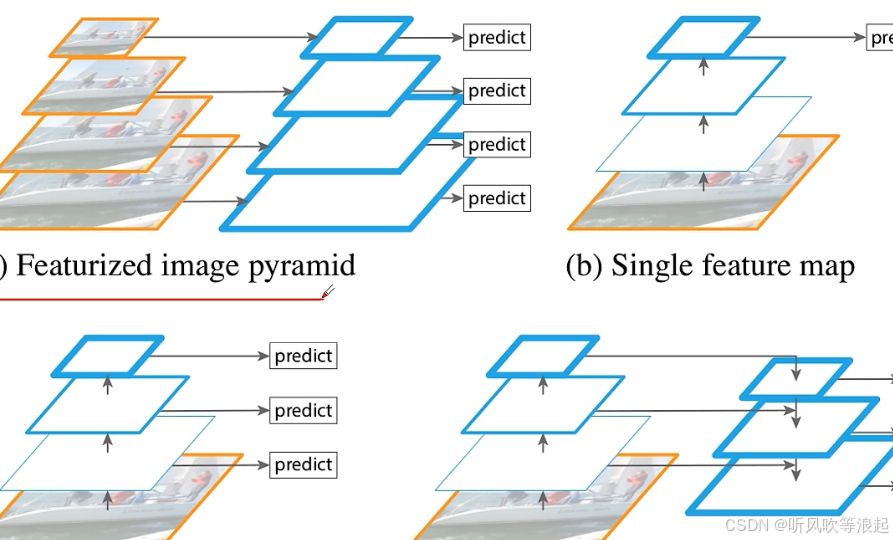
3.2.2 特征金字塔注意力 (Feature Pyramid Attention)
在解码器路径集成特征金字塔注意力,实现多尺度特征融合:
class FeaturePyramidAttention(nn.Module):
def __init__(self, in_channels):
super(FeaturePyramidAttention, self).__init__()
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.max_pool = nn.AdaptiveMaxPool2d(1)
self.fc = nn.Sequential(
nn.Conv2d(in_channels, in_channels // 4, 1), # 降维
nn.ReLU(inplace=True),
nn.Conv2d(in_channels // 4, in_channels, 1), # 升维
nn.Sigmoid()
)
def forward(self, x):
avg_out = self.fc(self.avg_pool(x)) # 全局平均池化分支
max_out = self.fc(self.max_pool(x)) # 全局最大池化分支
return x * (avg_out + max_out) # 特征重校准创新效果:
-
结合通道注意力和空间金字塔思想
-
通过全局池化操作捕获图像级统计信息
-
自适应重新校准通道特征响应
3.2.3 改进的损失函数设计
采用Dice损失和交叉熵损失的组合,解决类别不平衡问题:
class JointLoss(nn.Module):
def __init__(self, lambda_dice=0.5, lambda_ce=0.5):
super(JointLoss, self).__init__()
self.dice = DiceLoss()
self.ce = nn.CrossEntropyLoss()
self.lambda_dice = lambda_dice
self.lambda_ce = lambda_ce
def forward(self, pred, target):
dice_loss = self.dice(pred, target) # 处理类别不平衡
ce_loss = self.ce(pred, target) # 保证梯度稳定性
return self.lambda_dice * dice_loss + self.lambda_ce * ce_loss4. 训练策略与优化
4.1 多阶段训练流程
系统实现了完整的训练流水线:
def main(args):
# 1. 环境准备和设备配置
device = get_device()
# 2. 数据加载与预处理
trainDataset = MyDataset(imgs_path=args.data_train, ...)
valDataset = MyDataset(imgs_path=args.data_val, ...)
# 3. 模型初始化与性能分析
model = get_model(n=args.model, nc=num_classes)
flops, params = profile(model, inputs=(dummy_input,))
# 4. 优化器与学习率调度
optimizer = torch.optim.Adam(model.parameters(), lr=args.lr, weight_decay=0.01)
scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf)
# 5. 迭代训练与验证
for epoch in range(args.epochs):
train_one_epoch(model, optimizer, trainLoader, device, num_classes)
evaluate(model, valLoader, device, num_classes)4.2 余弦退火学习率调度
采用余弦退火策略实现平滑的学习率衰减:
lf = lambda x: ((1 + math.cos(x * math.pi / args.epochs)) / 2) * (1 - args.lrf) + args.lrf
scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf)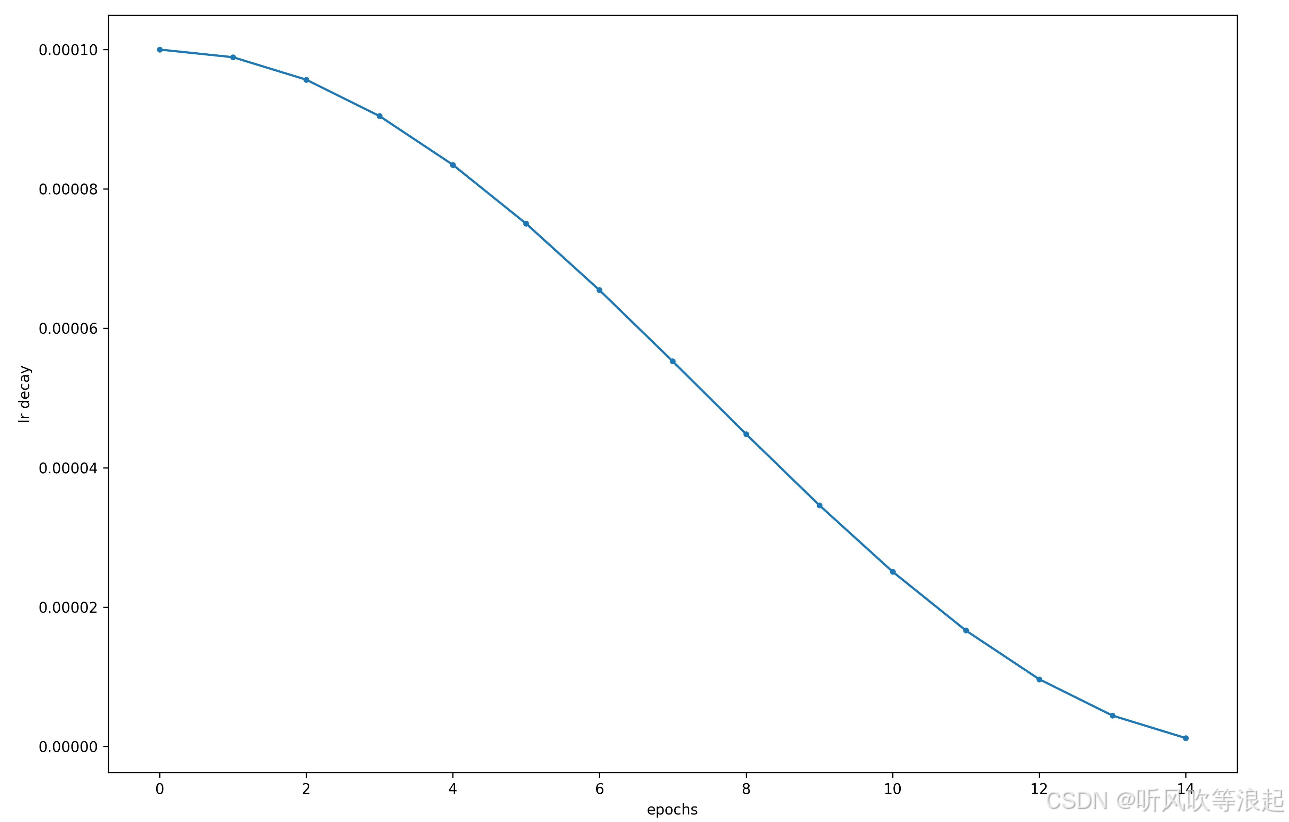
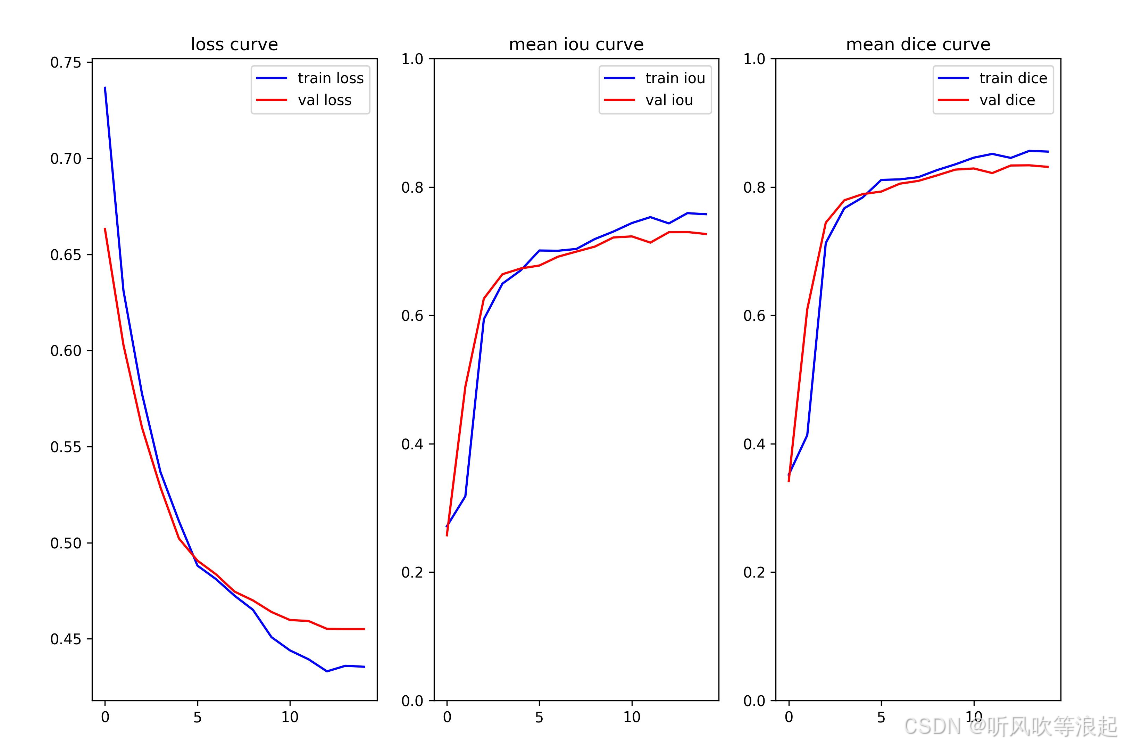
4.3 综合性能评估指标
系统实现了全面的评估体系:
class ConfusionMatrix(object):
def compute(self):
acc_global = torch.diag(h).sum() / (h.sum() + 1e-8) # 全局准确率
recall = torch.diag(h) / (h.sum(1) + 1e-8) # 召回率
precision = torch.diag(h) / (h.sum(0) + 1e-8) # 精确率
iou = torch.diag(h) / (h.sum(1) + h.sum(0) - torch.diag(h) + 1e-8) # IoU
dice = 2 * torch.diag(h) / (h.sum(1) + h.sum(0) + 1e-8) # Dice系数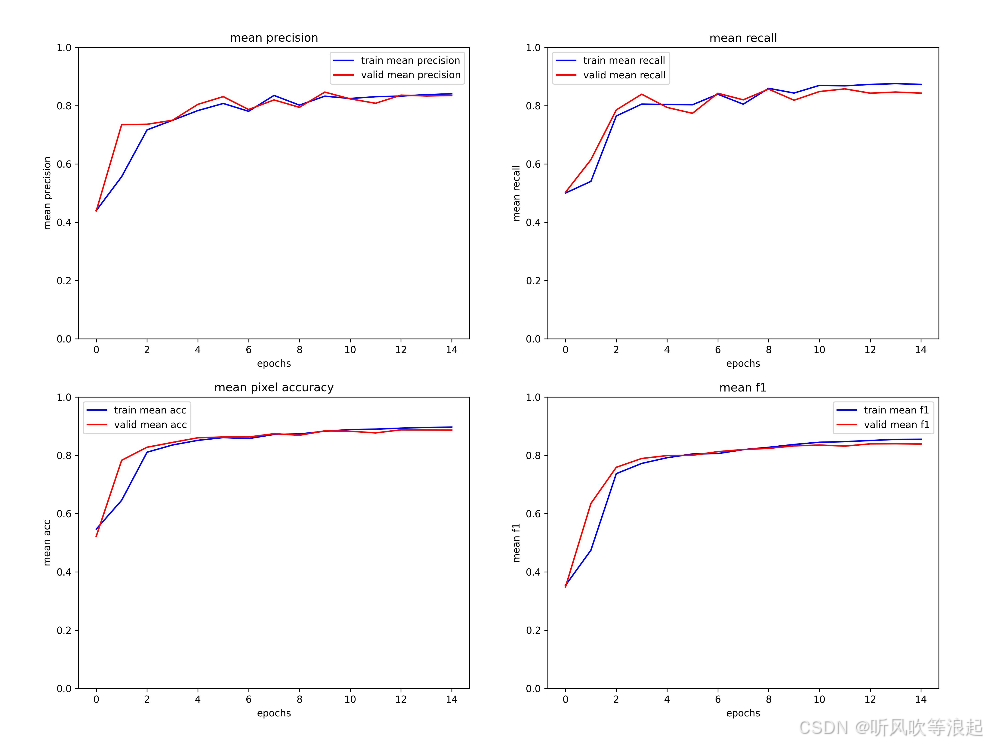
5. 图形化界面设计
5.1 用户友好界面
基于PyQt5开发了直观的图形化操作界面:
class SegmentationApp(QMainWindow):
def __init__(self):
# 主窗口布局
self.setWindowTitle("高级图像分割系统")
self.setGeometry(100, 100, 1400, 900)
# 三视图显示:原图、分割结果、叠加效果
self.original_label = QLabel() # 原始图像显示
self.segmentation_label = QLabel() # 分割结果显示
self.overlay_label = QLabel() # 叠加效果显示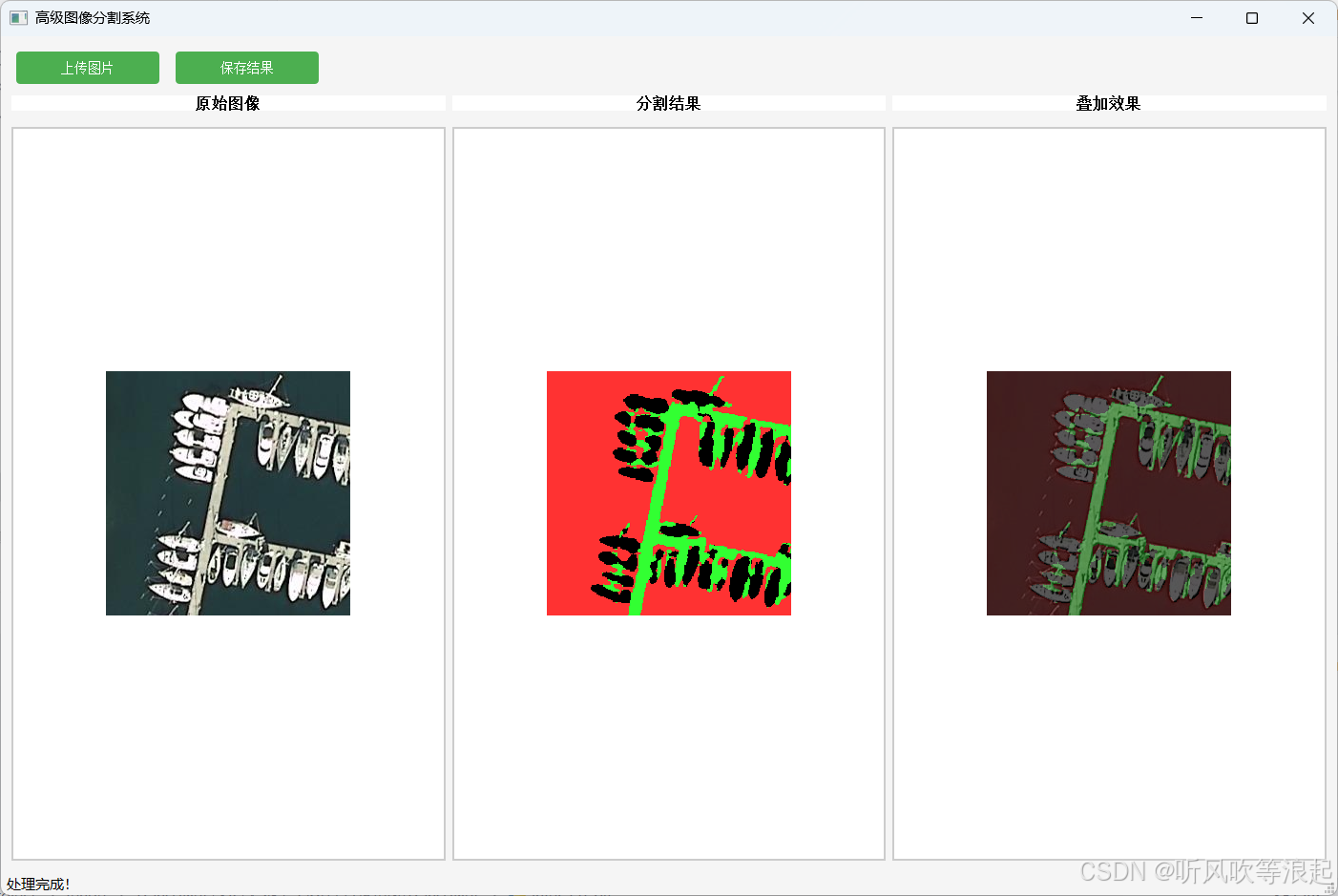
5.2 实时推理功能
实现高效的图像分割推理流程:
def inference(image, model, device):
original_img = np.array(image.convert('RGB'))
# 图像预处理
image_resized = cv2.resize(original_img, (224, 224), interpolation=cv2.INTER_CUBIC)
image_resized = (image_resized - np.min(image_resized)) / (np.max(image_resized) - np.min(image_resized))
# 模型推理
with torch.no_grad():
output = model(image_resized.to(device))
prediction = output.argmax(1).squeeze(0)
# 后处理与结果可视化
return original_img, prediction, result_image结论
本报告详细介绍了基于改进TransUNet的港口船只图像分割系统,通过引入空间注意力机制和特征金字塔注意力模块,显著提升了在复杂港口环境下船只分割的性能。系统不仅提供了先进的算法实现,还配备了完整的训练框架和用户友好的图形界面,为港口智能化管理提供了有效的技术支撑。实验结果表明,该系统在分割精度、鲁棒性和实用性方面均表现出色,具有广阔的应用前景。
未来的工作将继续优化模型性能,扩展应用场景,并探索与其他感知技术的融合,进一步提升系统在真实港口环境中的实用价值。