1、IF控制的定义
通常指电流频率控制;其中电流I调节电机的转矩输出,频率F则用于改变电机转速;
IF控制属于电流闭环,速度开环控制;
给定参考电流,参考速度,并将参考速度转换为对应频率的电角度;
2、IF启动
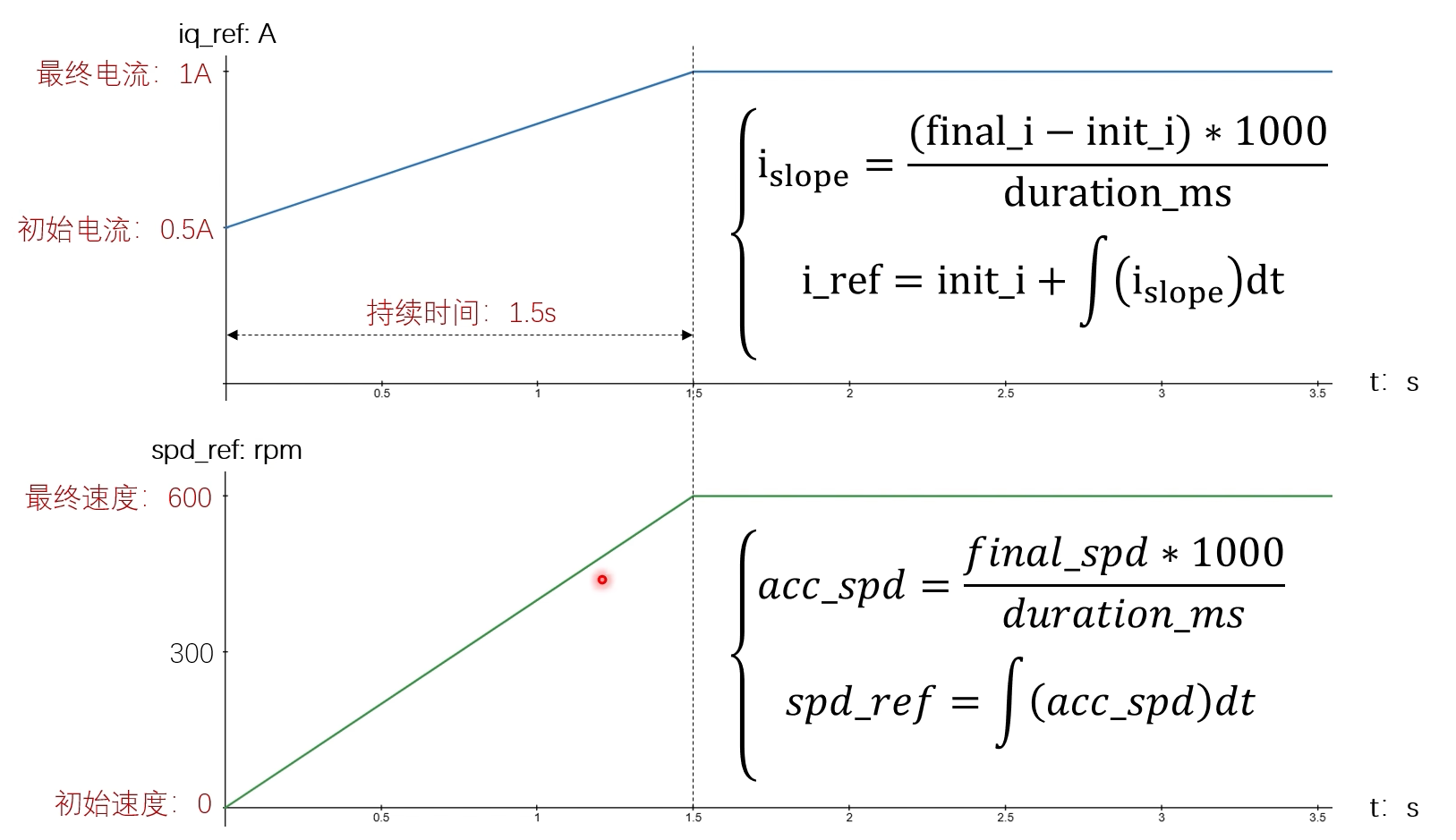
电流斜率Islope等于最终电流减去初始电流,除以时间(分子乘以1000是因为把分子秒转换为分母毫秒)
参考电流等于初始电流加上电流变化率的积分;
速度斜率也就是加速度等于最终速度除以时间;
参考速度等于加速度的积分;
3、初始定位
初始定位:上电后将转子N极(d轴),与A相绕组轴线对齐或固定夹角;
原因:上电后初始转子位置即d轴是随机的;
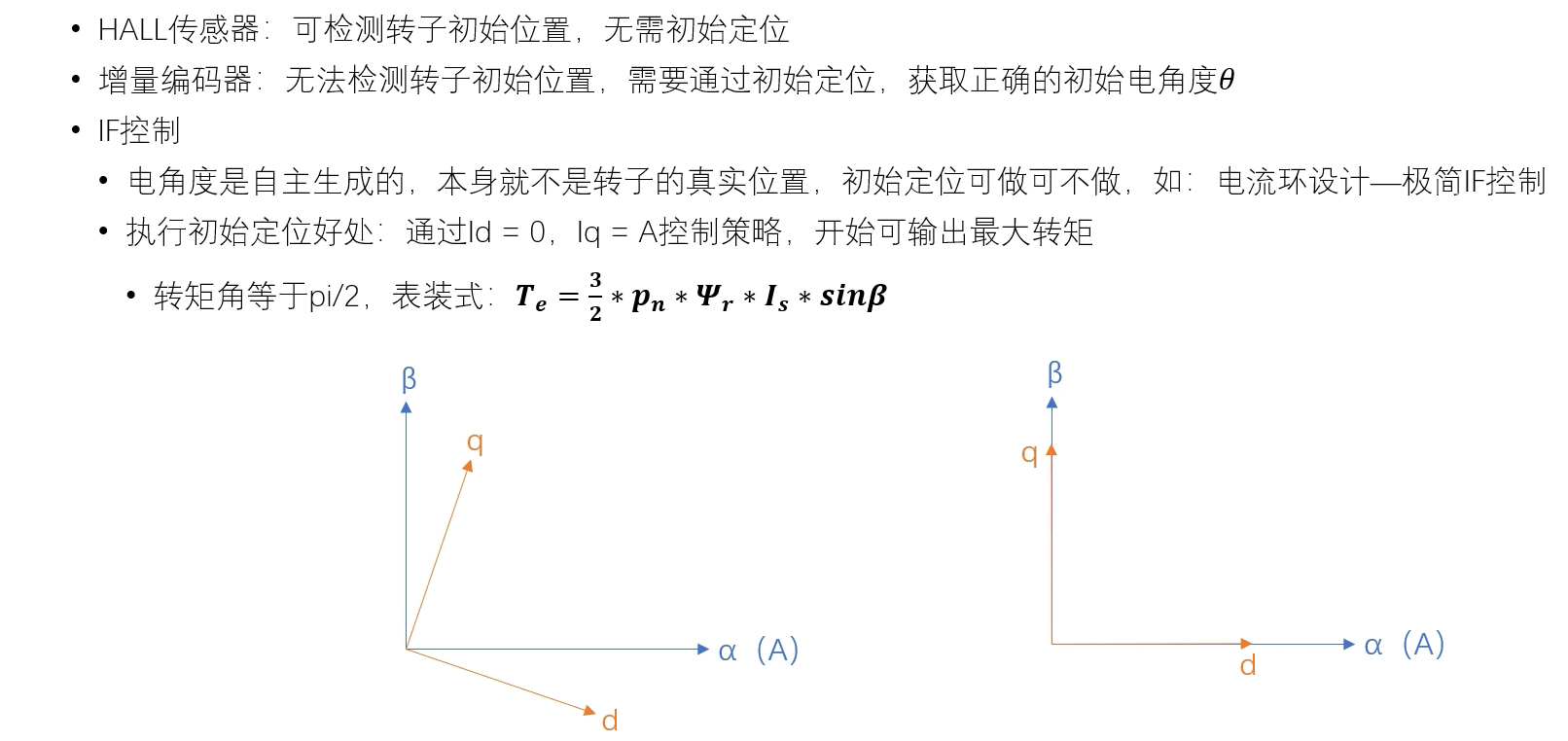
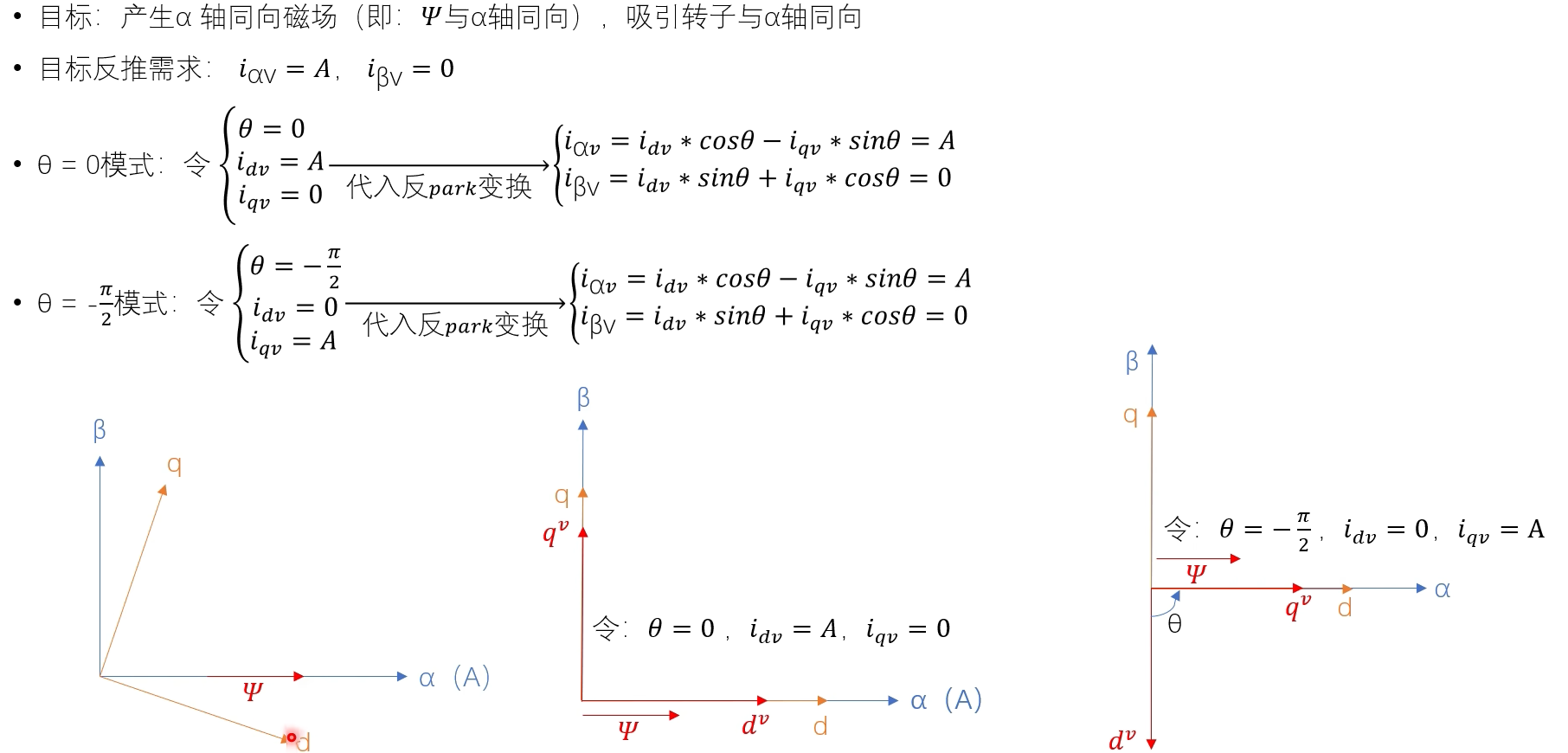
初始定位实现的两种方式
4、转矩控制
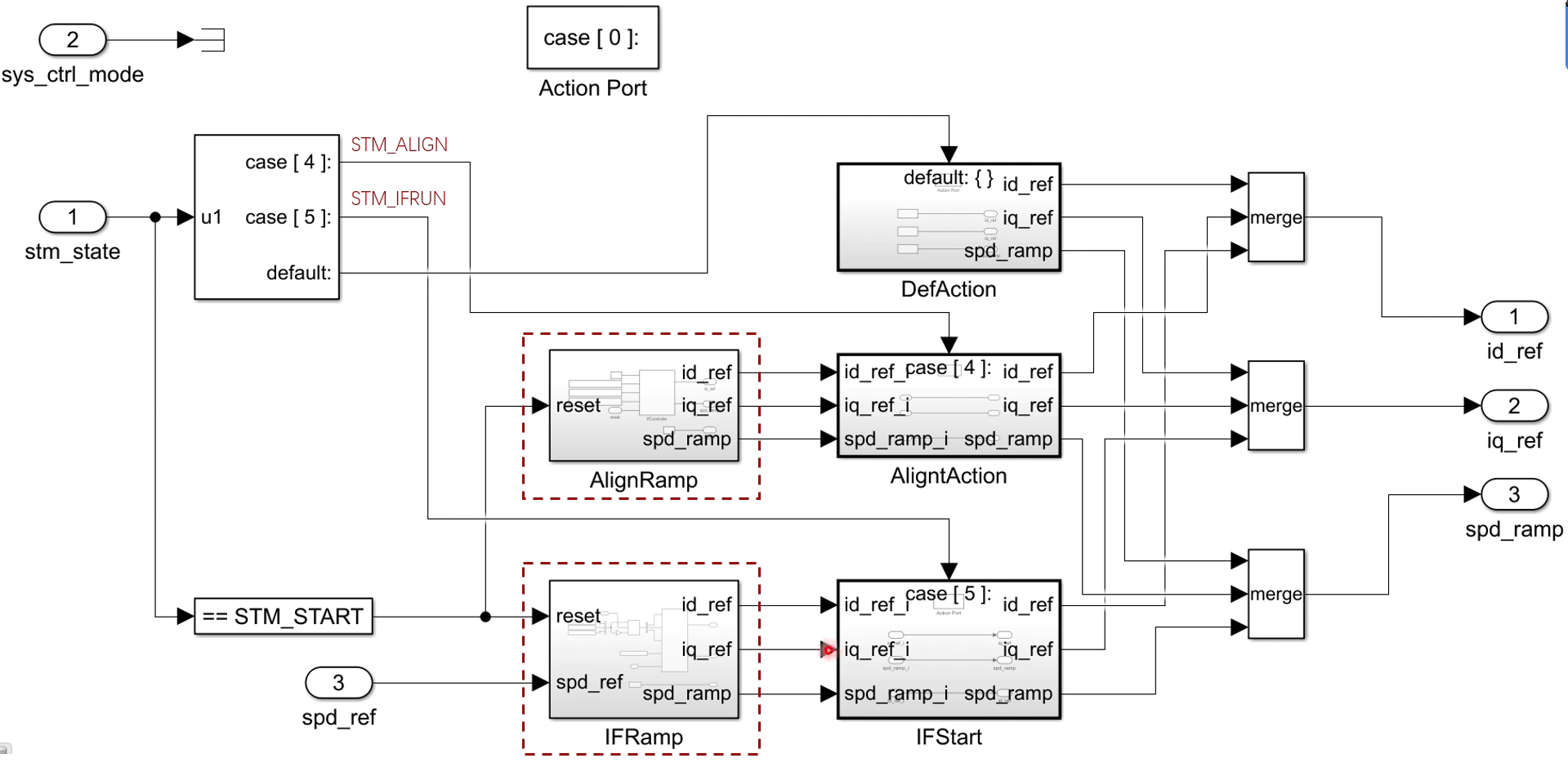
在转矩控制中,根据当前的控制状态作出不同的处理,比如对齐状态和IF运行状态,默认状态;
根据相应的处理输出相应的参考电流和参考速度;
在对齐状态下,通过对齐斜坡子系统输出系统对齐状态下的参考电流和参考速度;
在IF运行状态下,通过IF斜坡子系统输出系统在IF运行状态下的参考电流和参考速度;
在其他状态下,输出参考电流和参考速度为0;
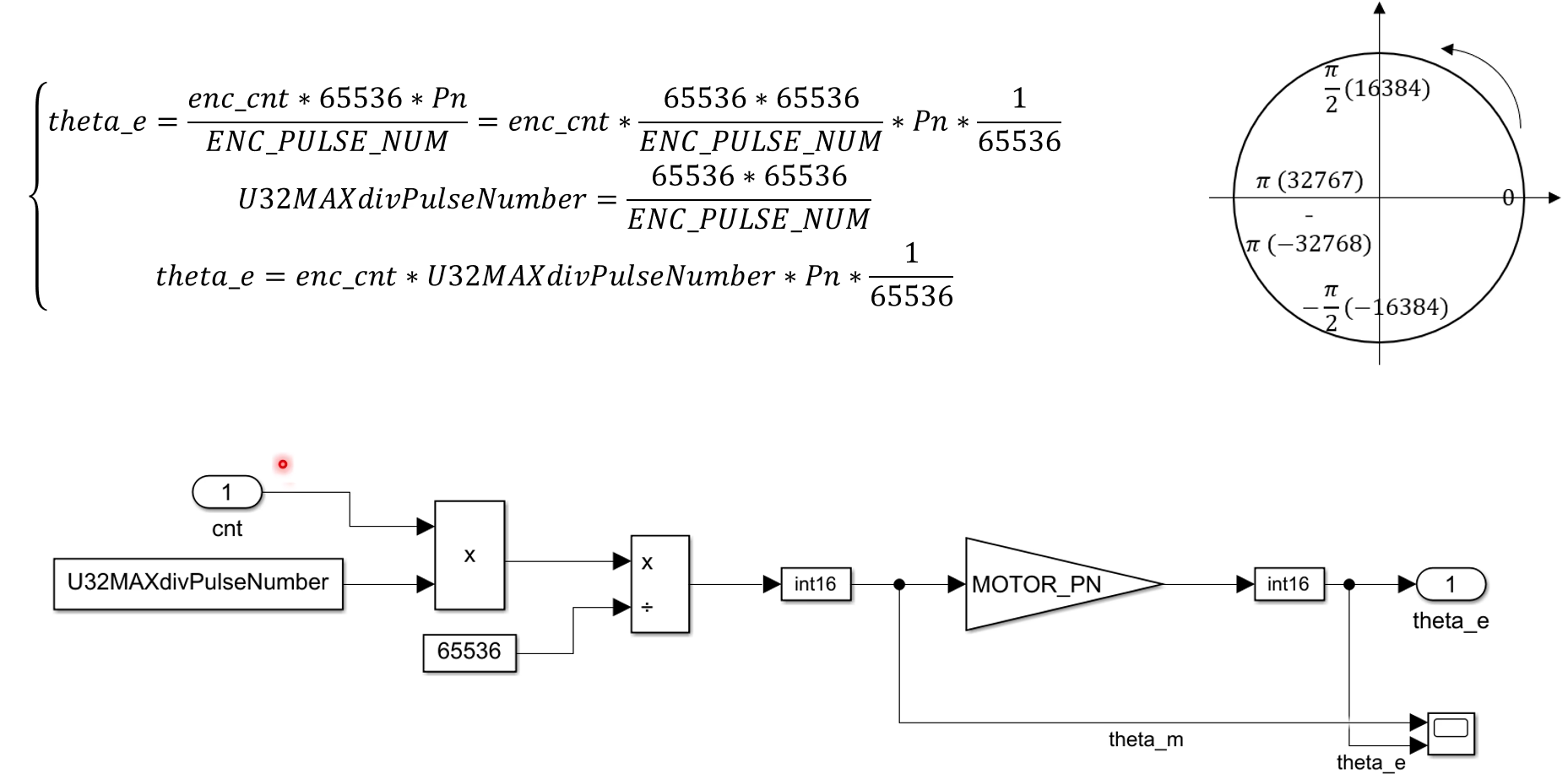
5、生成电角度
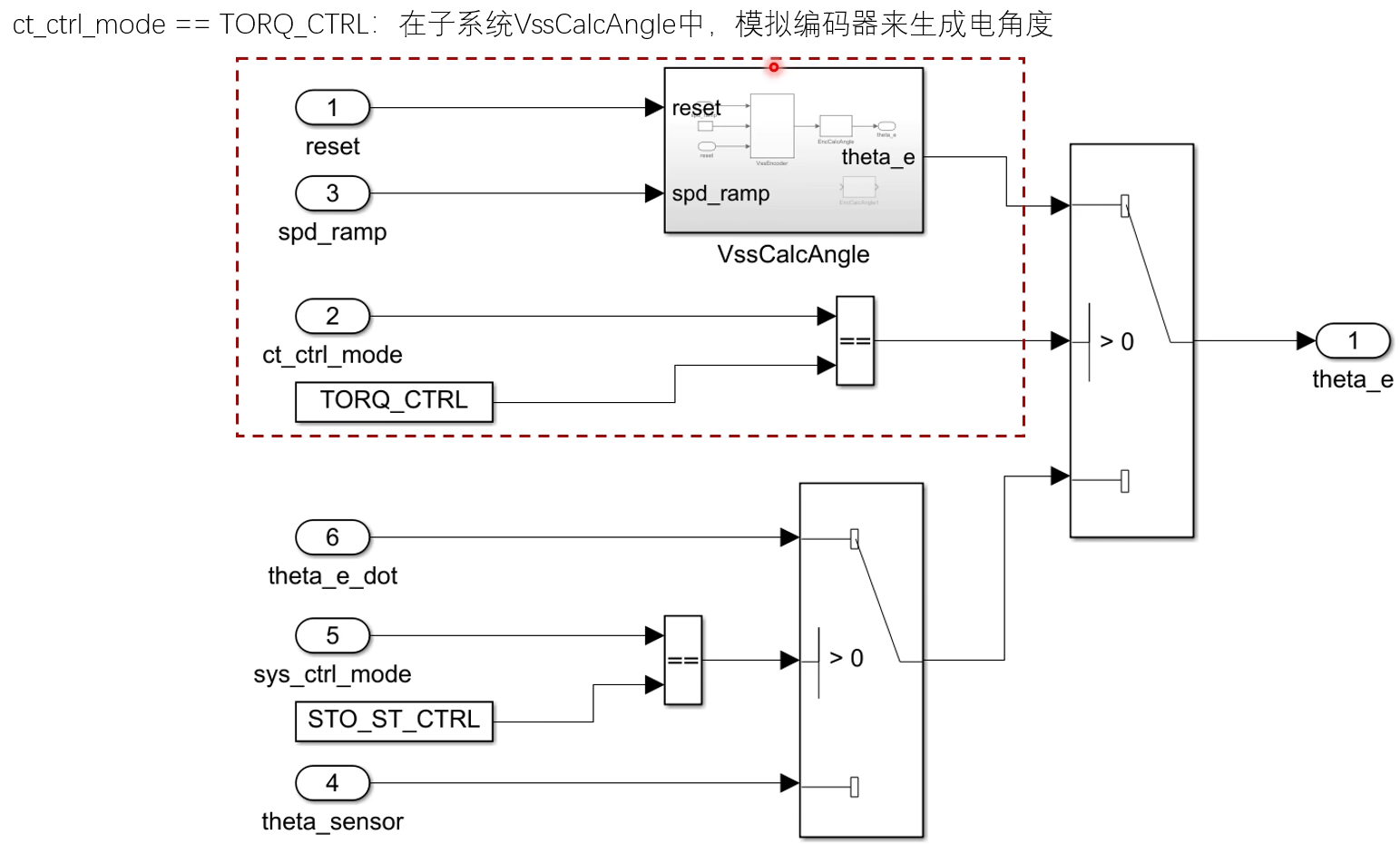
将参考速度转化为电角度输出
通过模拟编码器来生成电角度,电角度的模拟分为两部分
首先将参考速度转化为编码器的脉冲计数器,然后将编码器的脉冲计数转化为电角度输出;
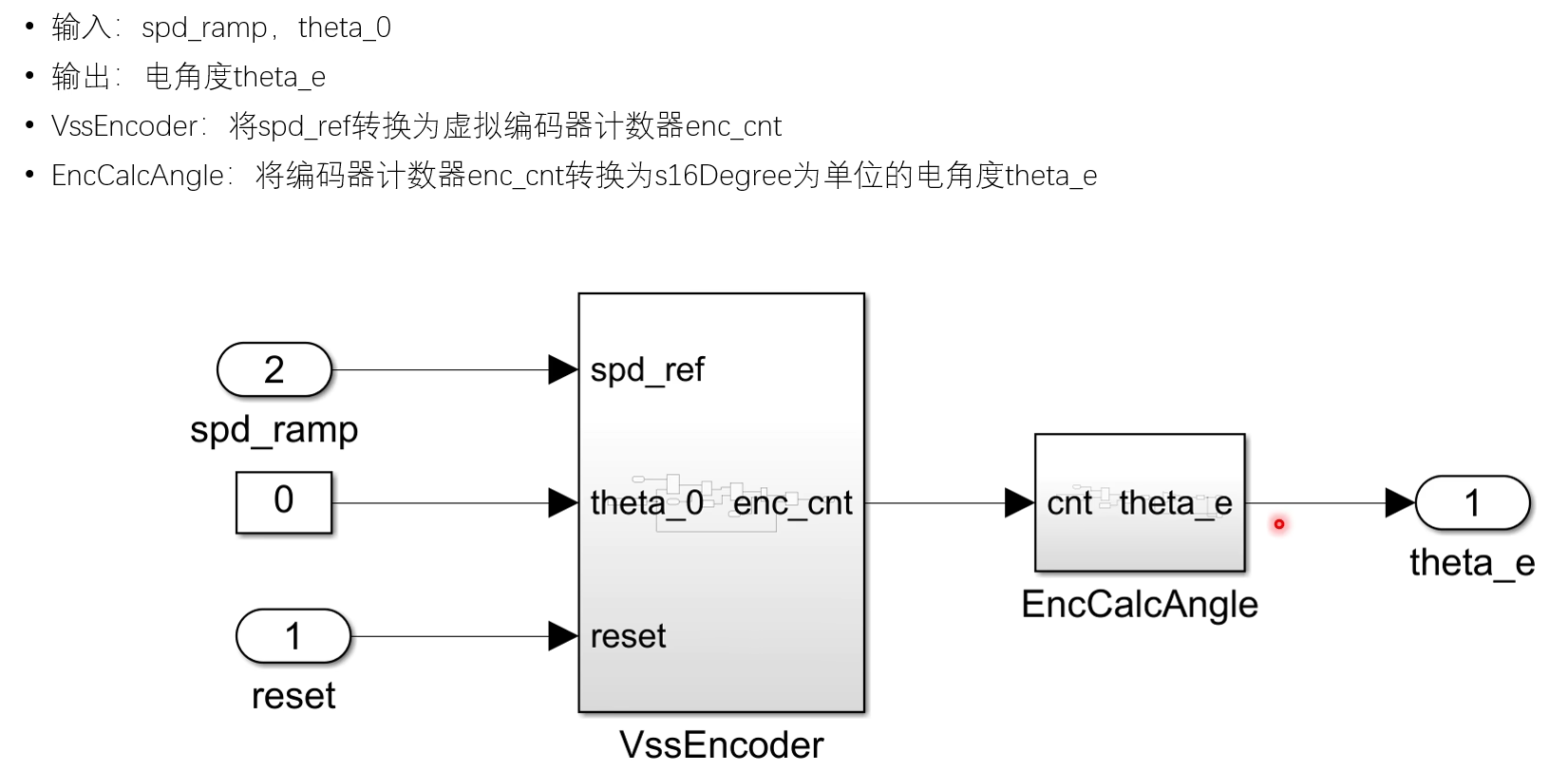
将参考速度转化为电角度的具体实现如下
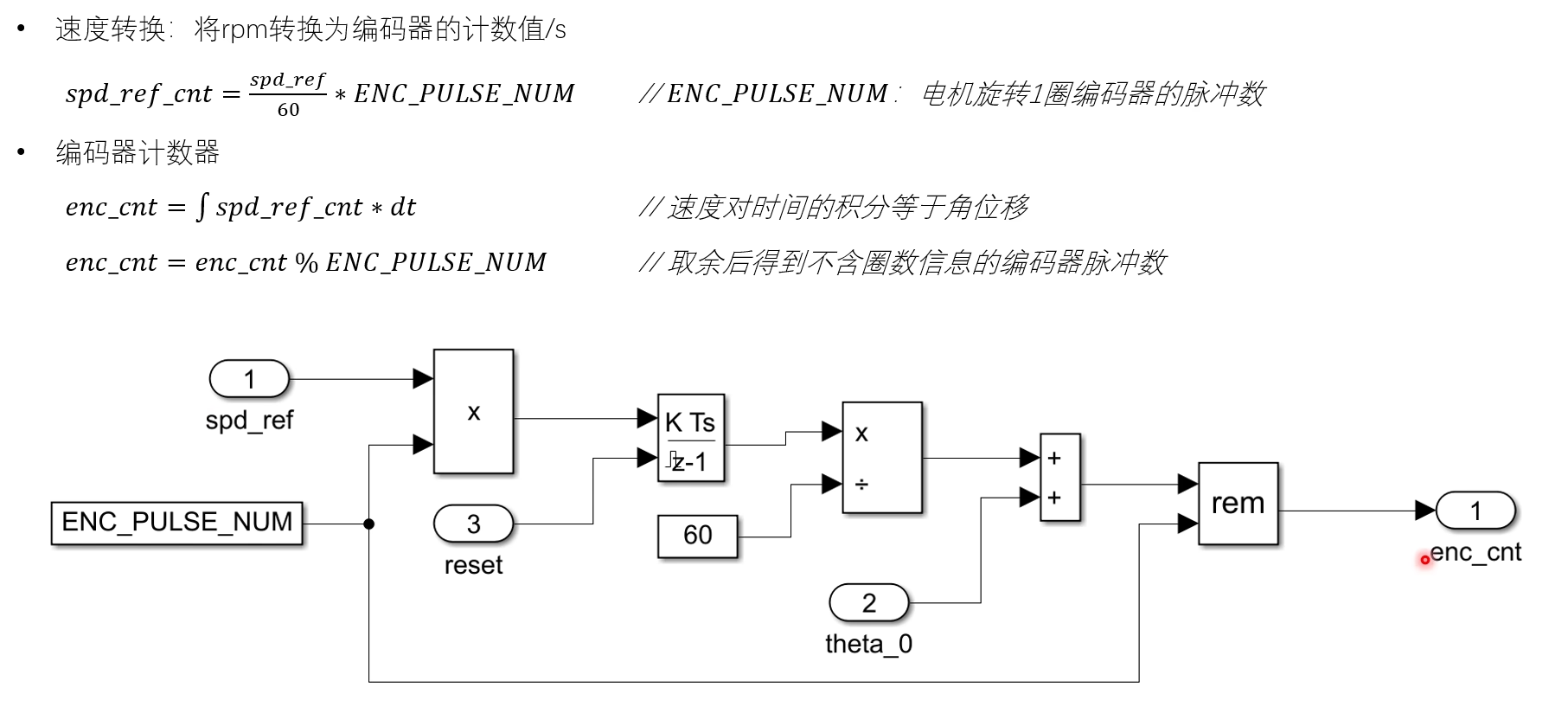
将参考速度转化为模拟编码器计数值
将计数值转化为电角度
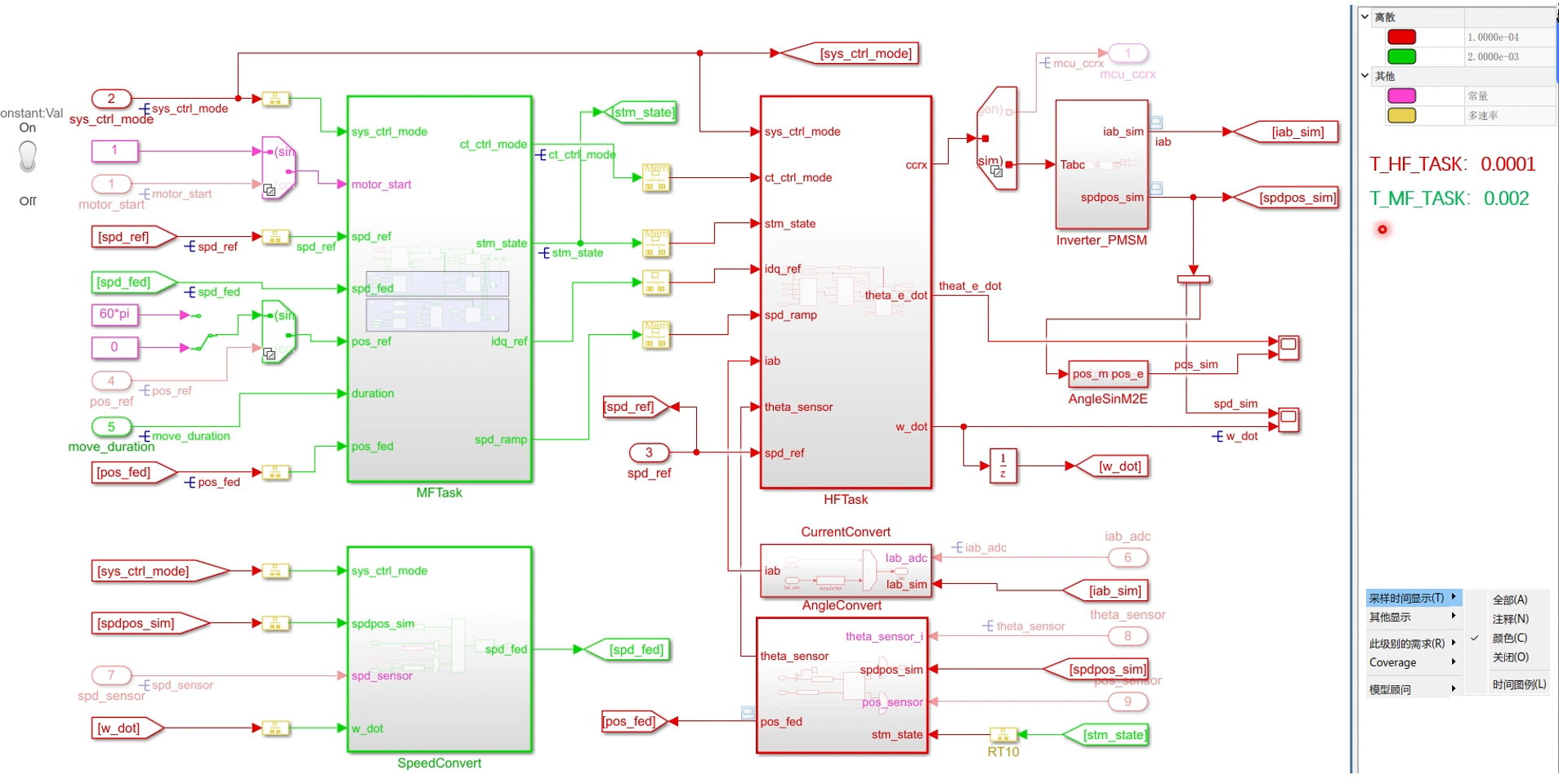
6、工程建模
6.1采样时间
整个系统分为中频任务和高频任务
绿色为中频任务,红色为高频任务
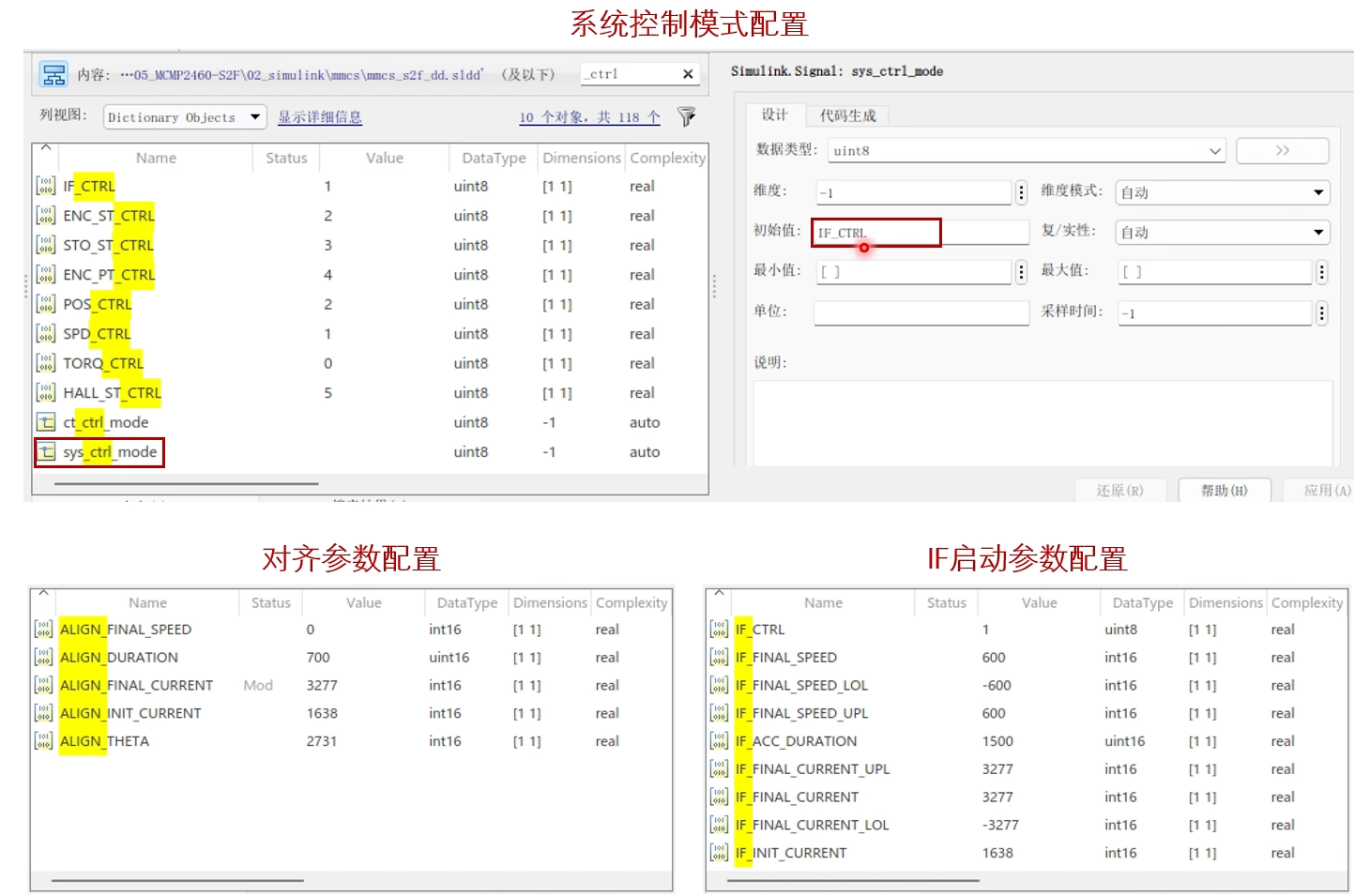
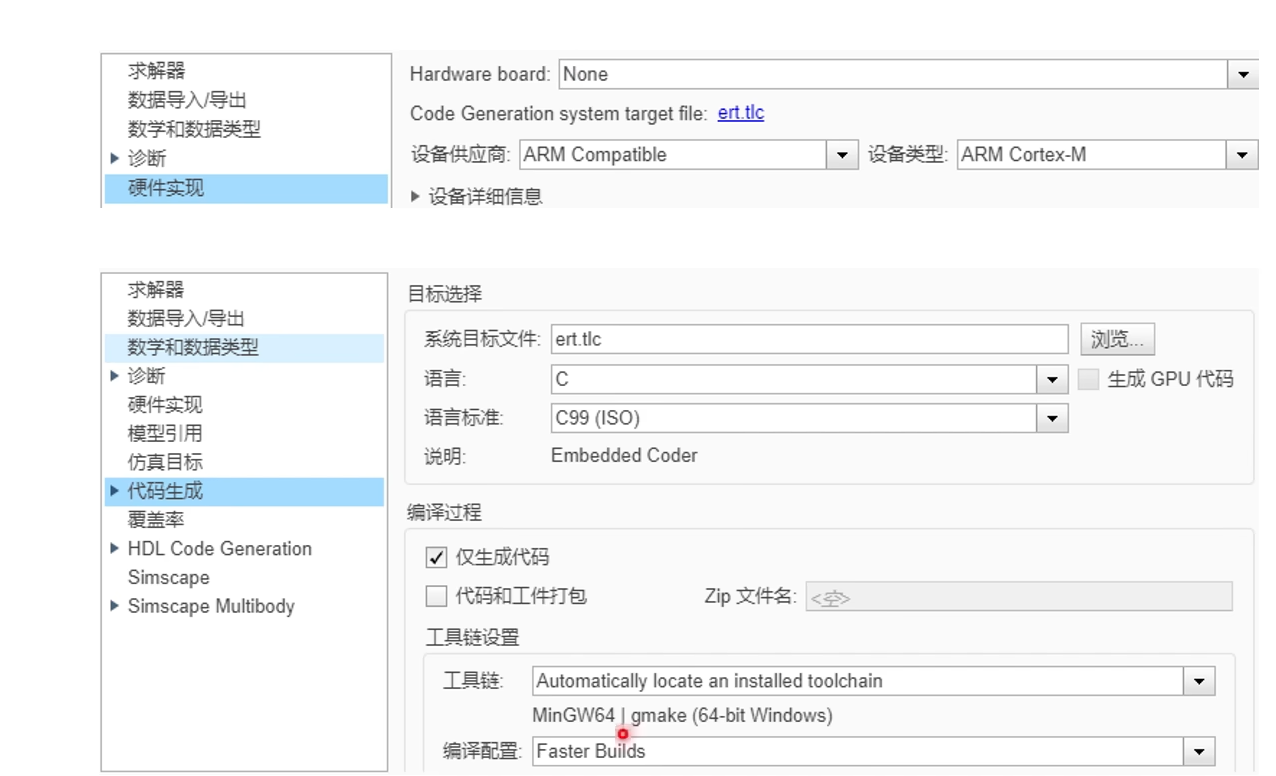
6.2参数配置
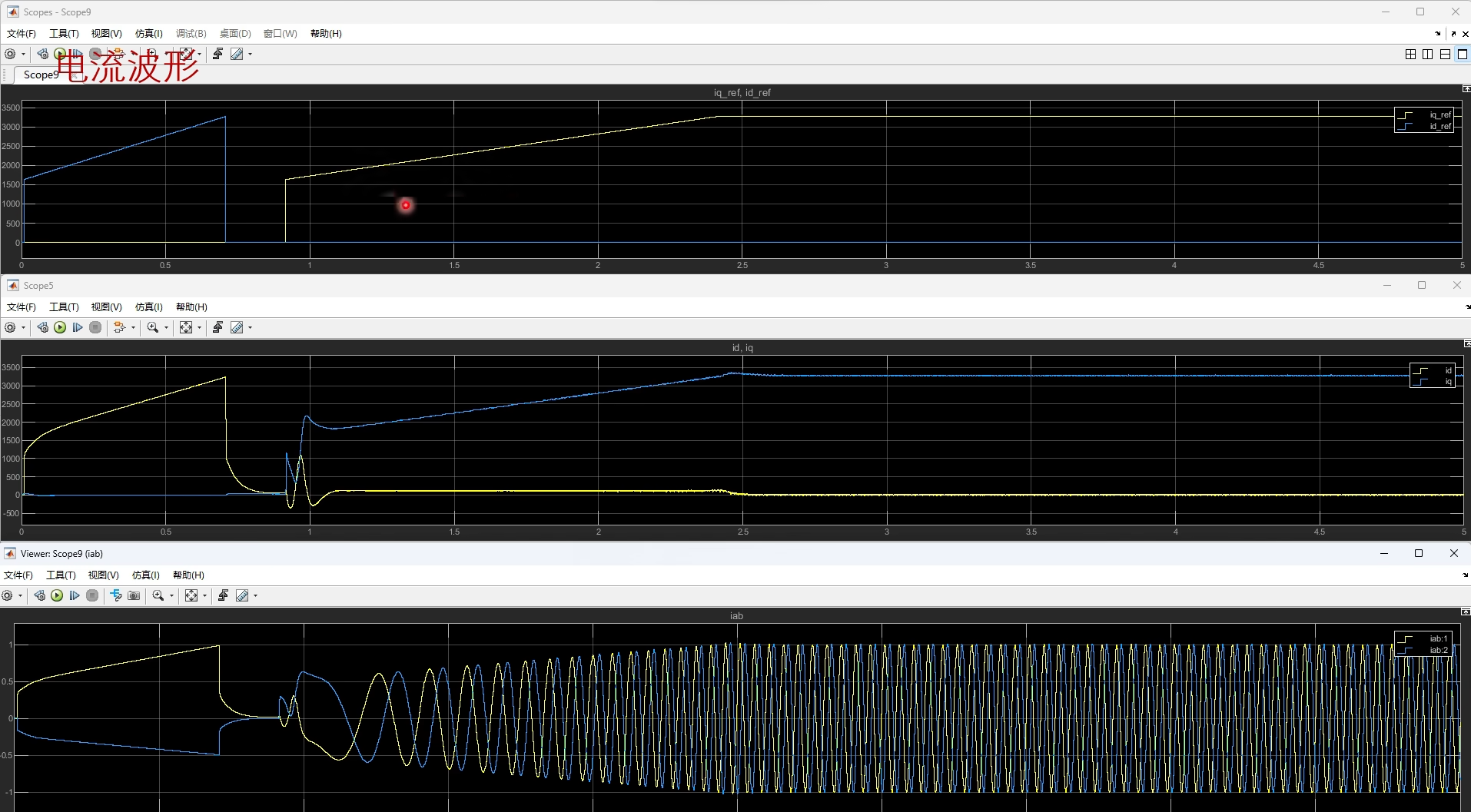
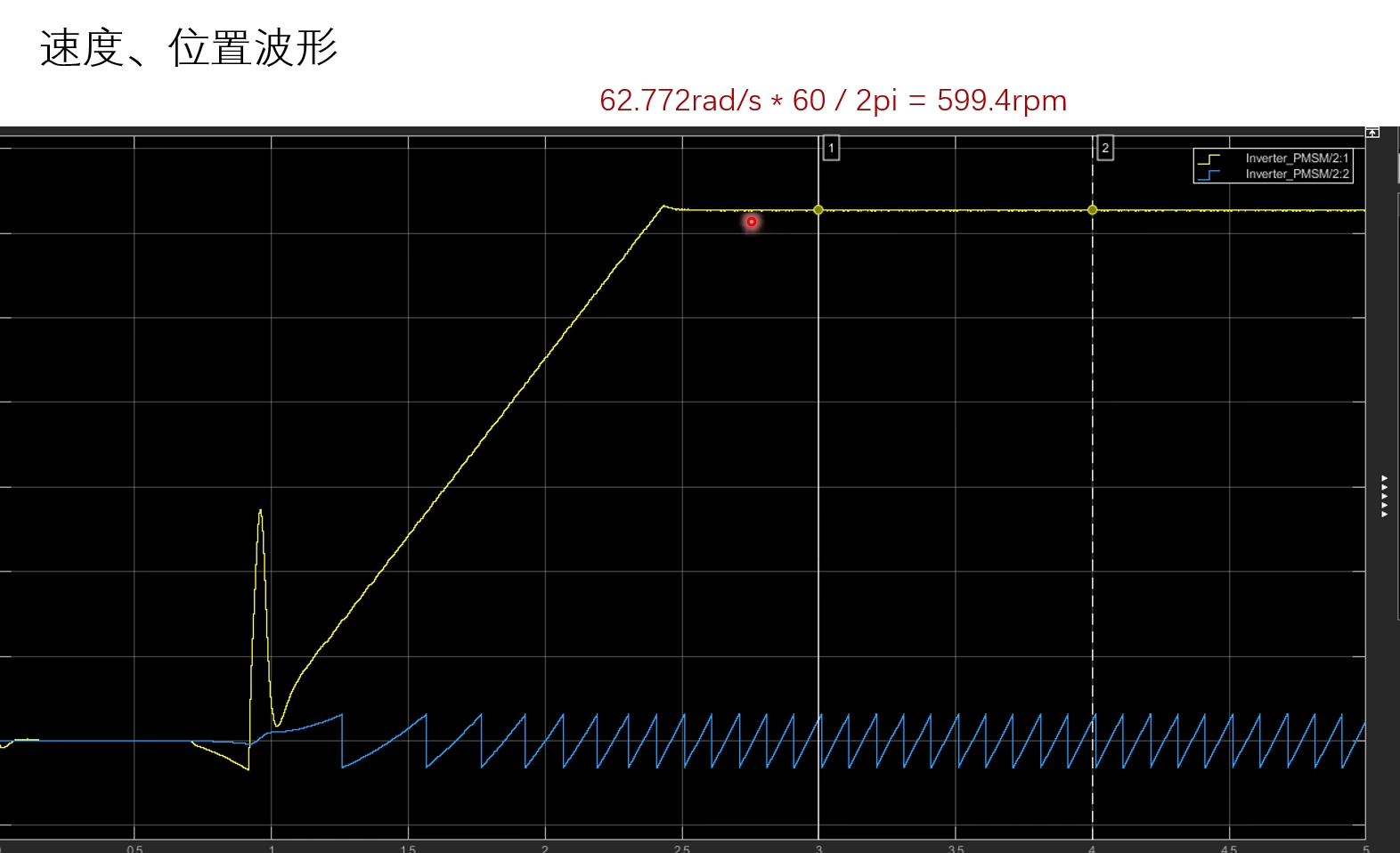
6.3仿真波形
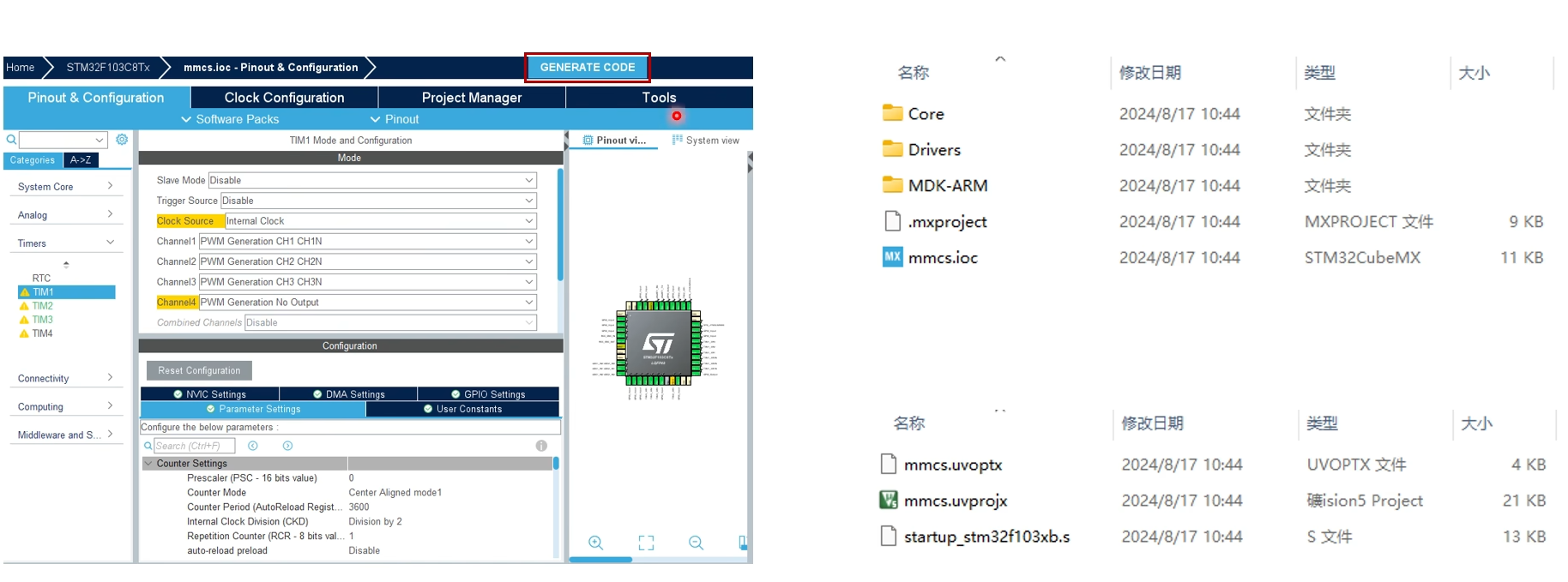
7、代码生成
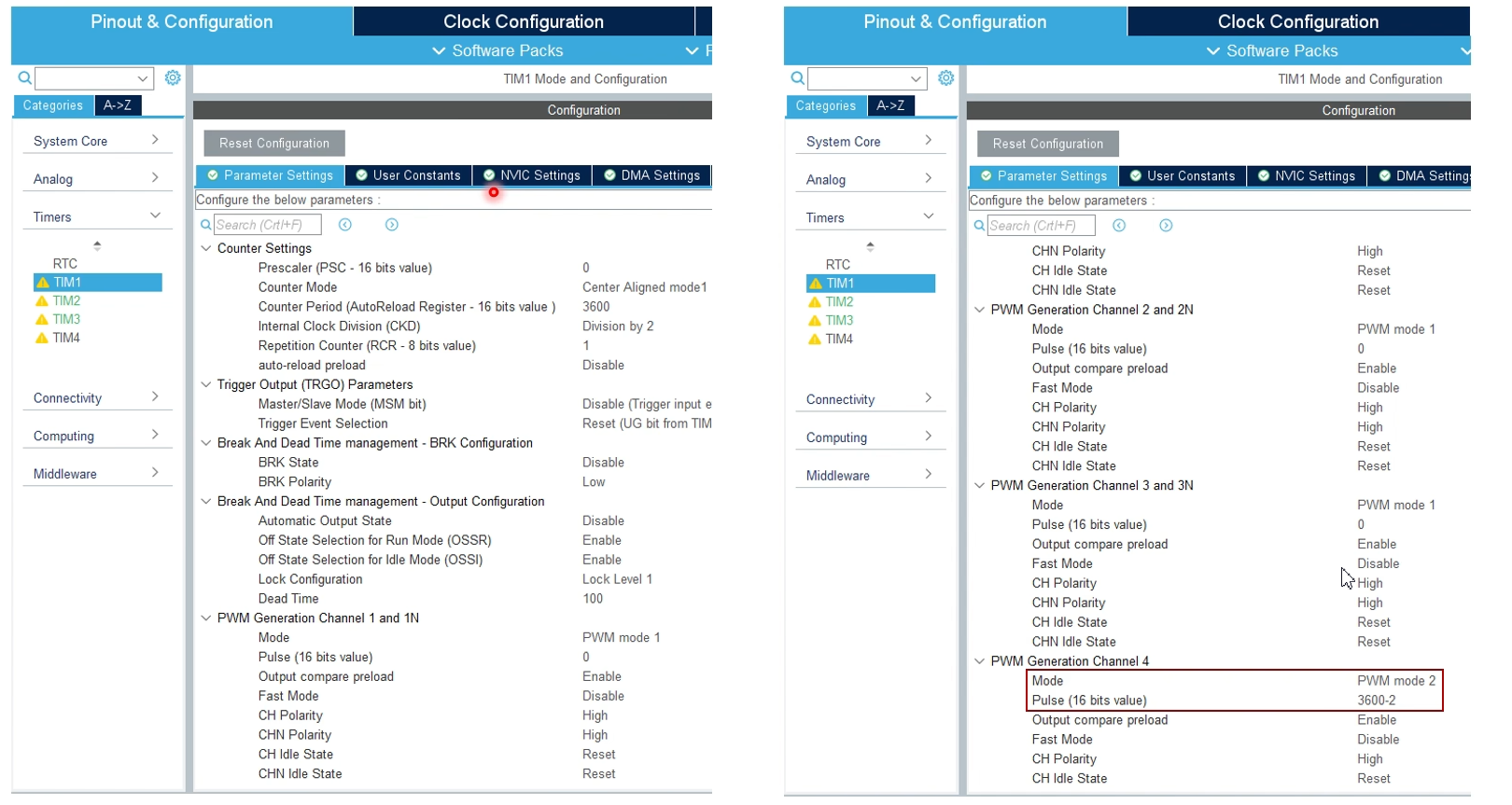
8、cubeMX生成嵌入式代码框架
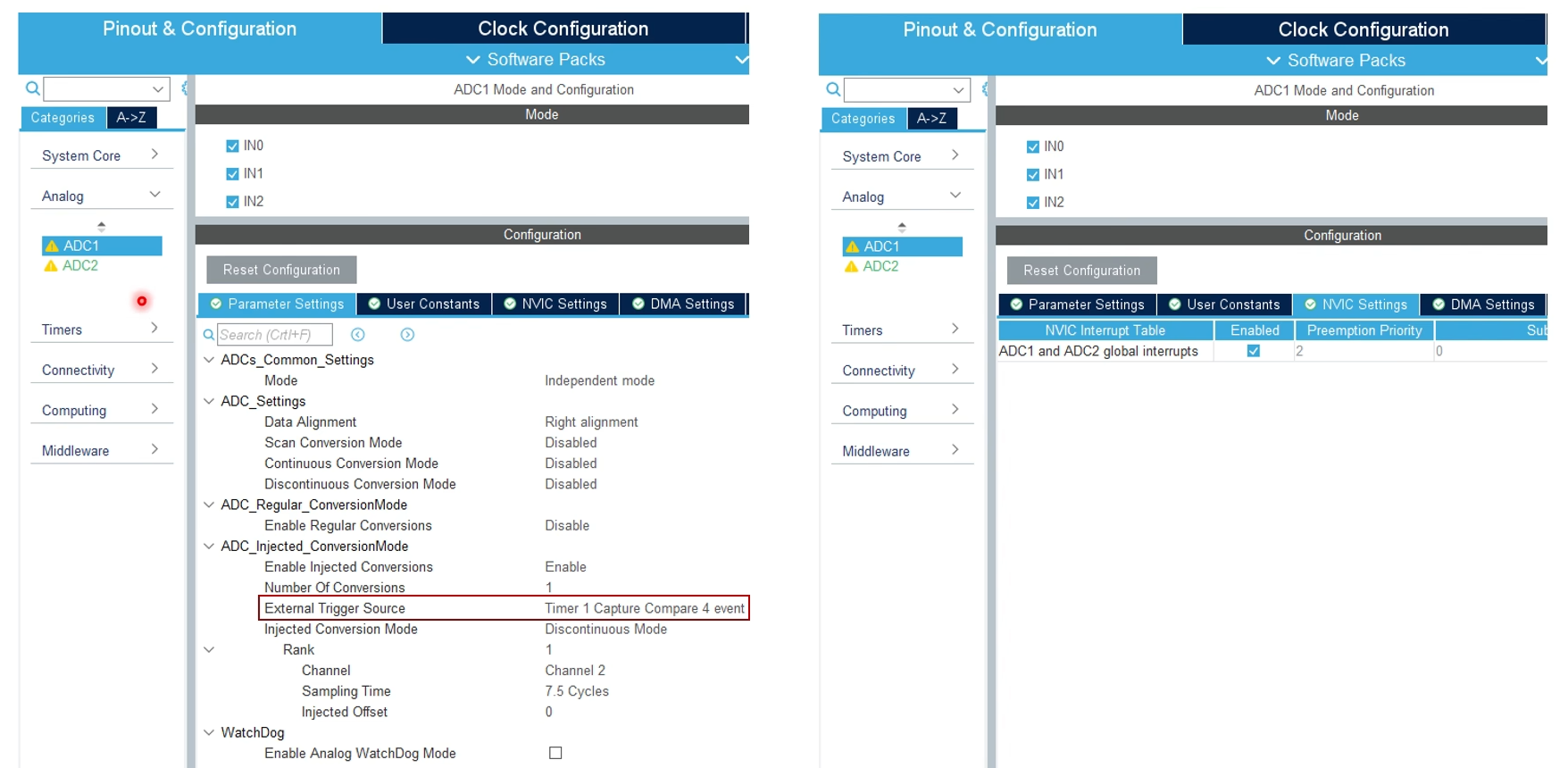
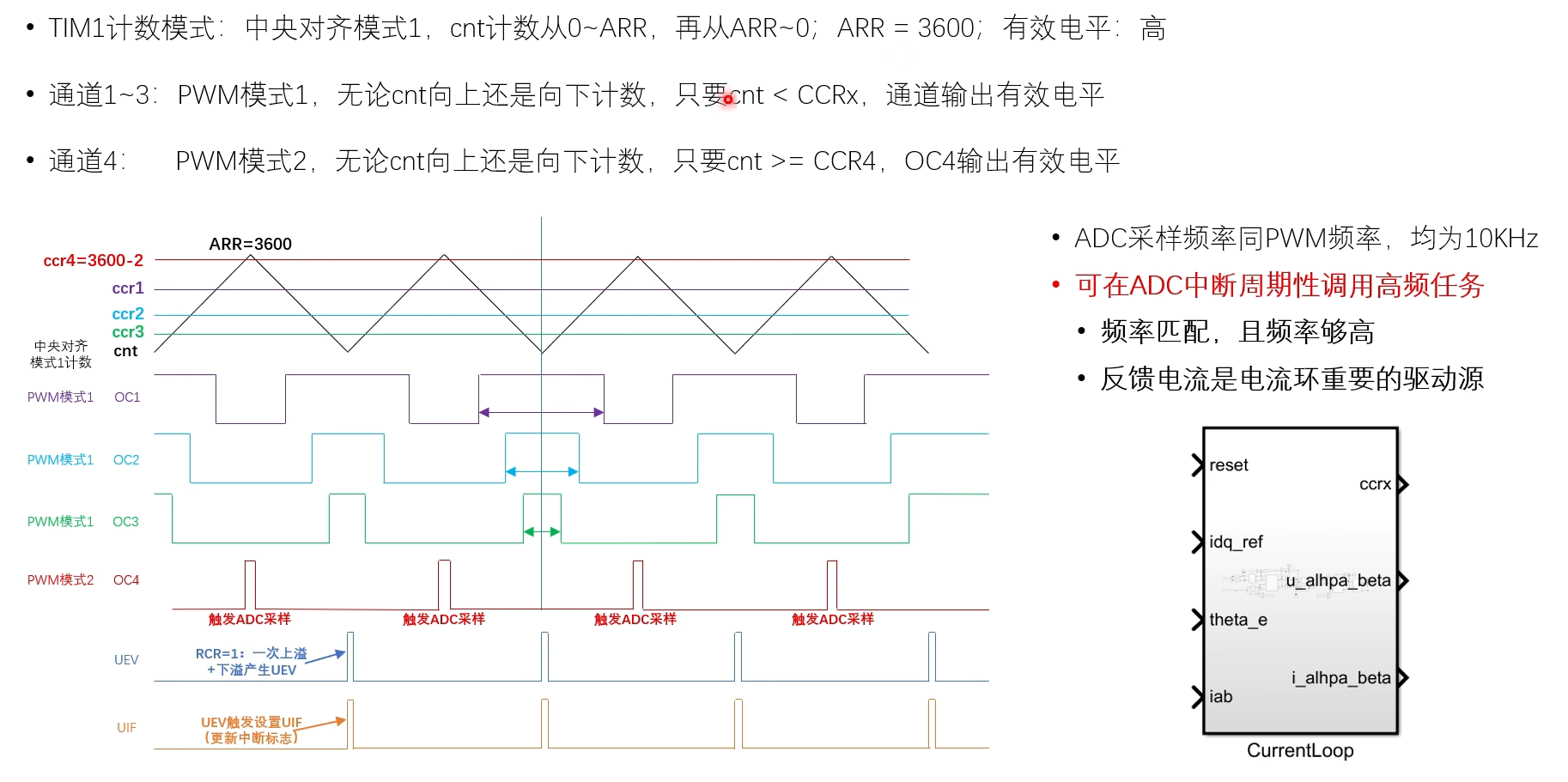
使用高级定时器1的1-3通道生成驱动电机的pwm发波,4通道为触发ADC采样的时钟源;
生成嵌入式代码框架
8.1adc与pwm时序
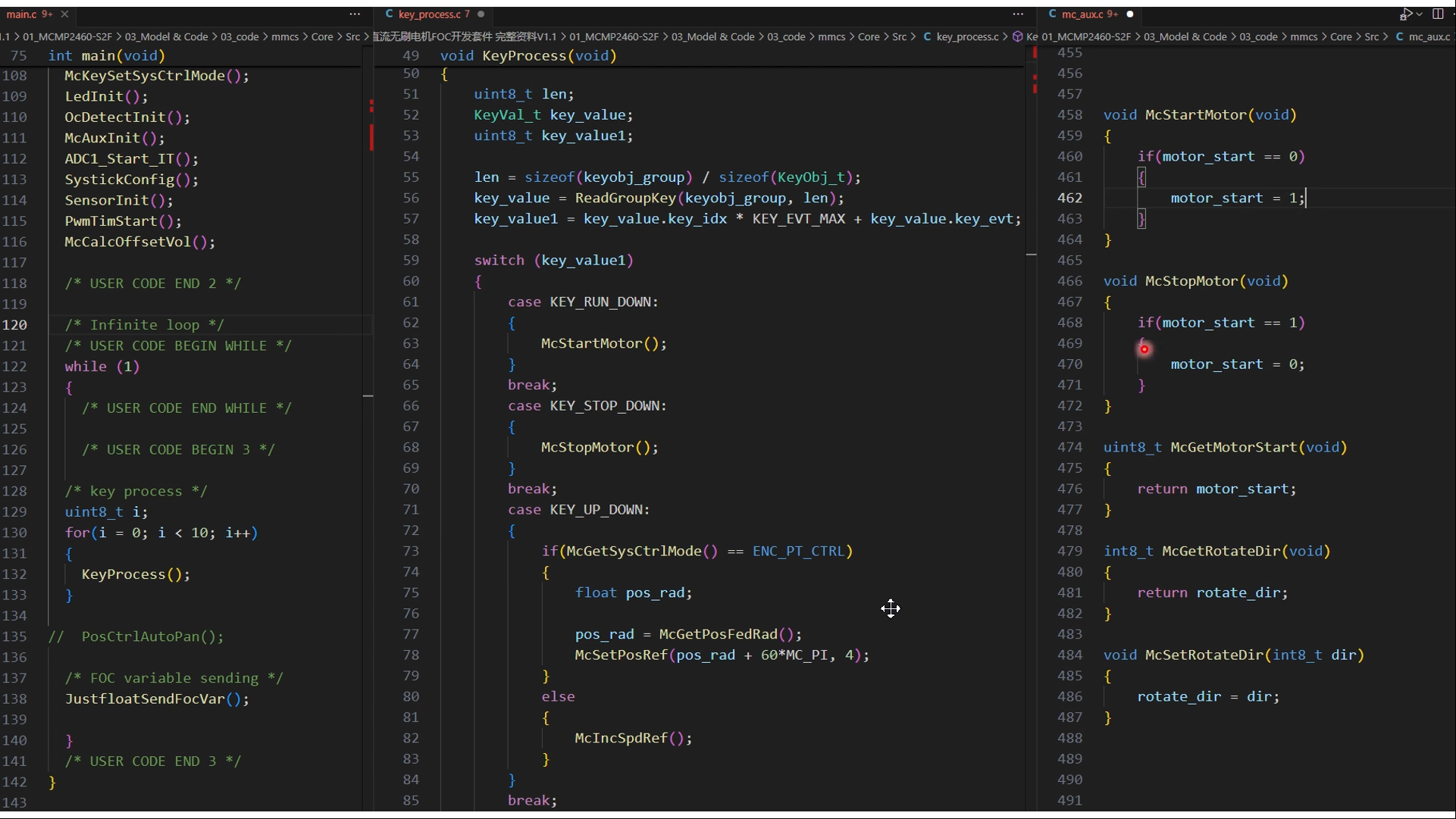
9、模型代码与嵌入式代码集成
在嵌入式代码框架工程中,新建一个文件夹,把simulink生成的代码复制到该文件中
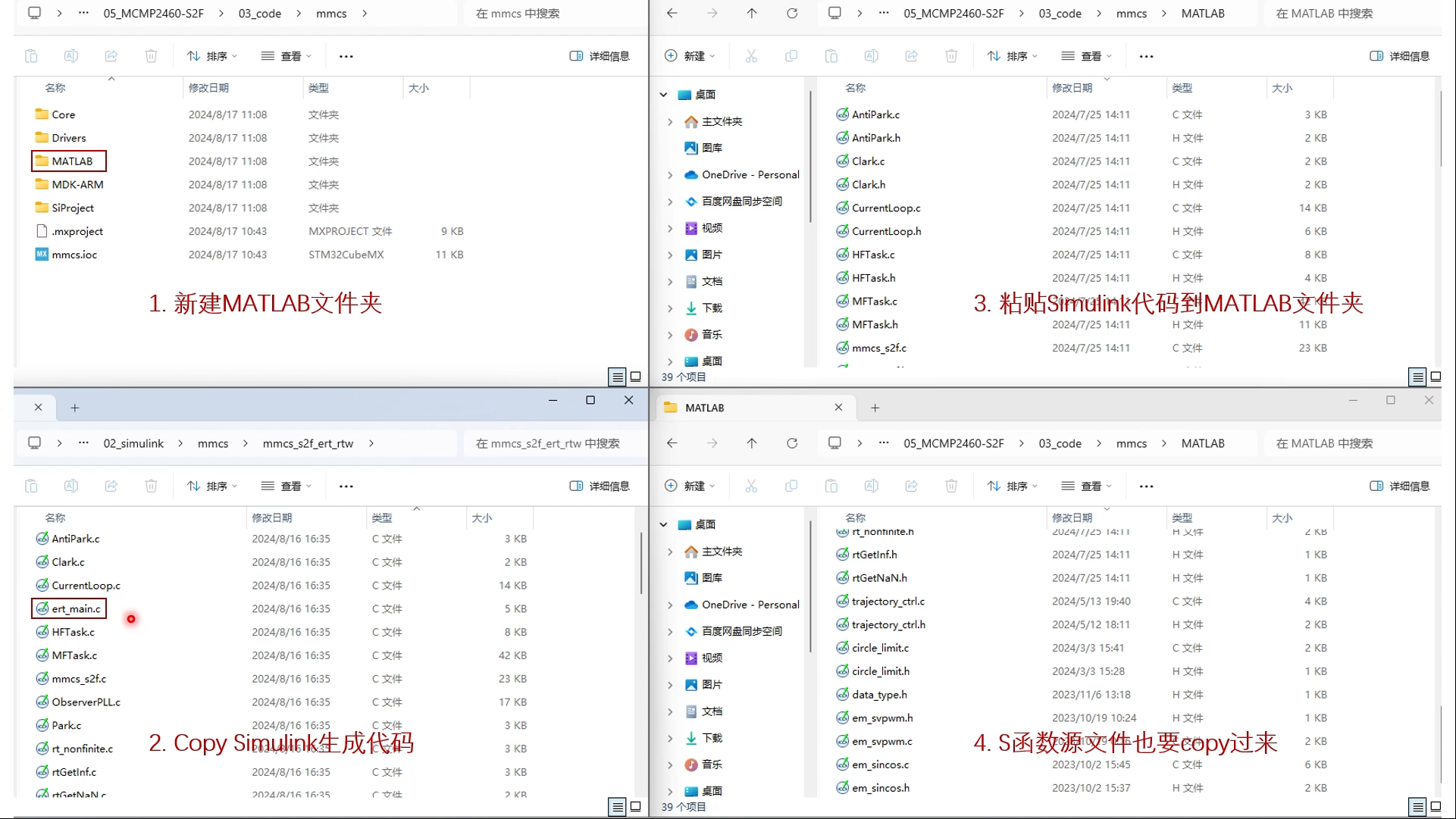
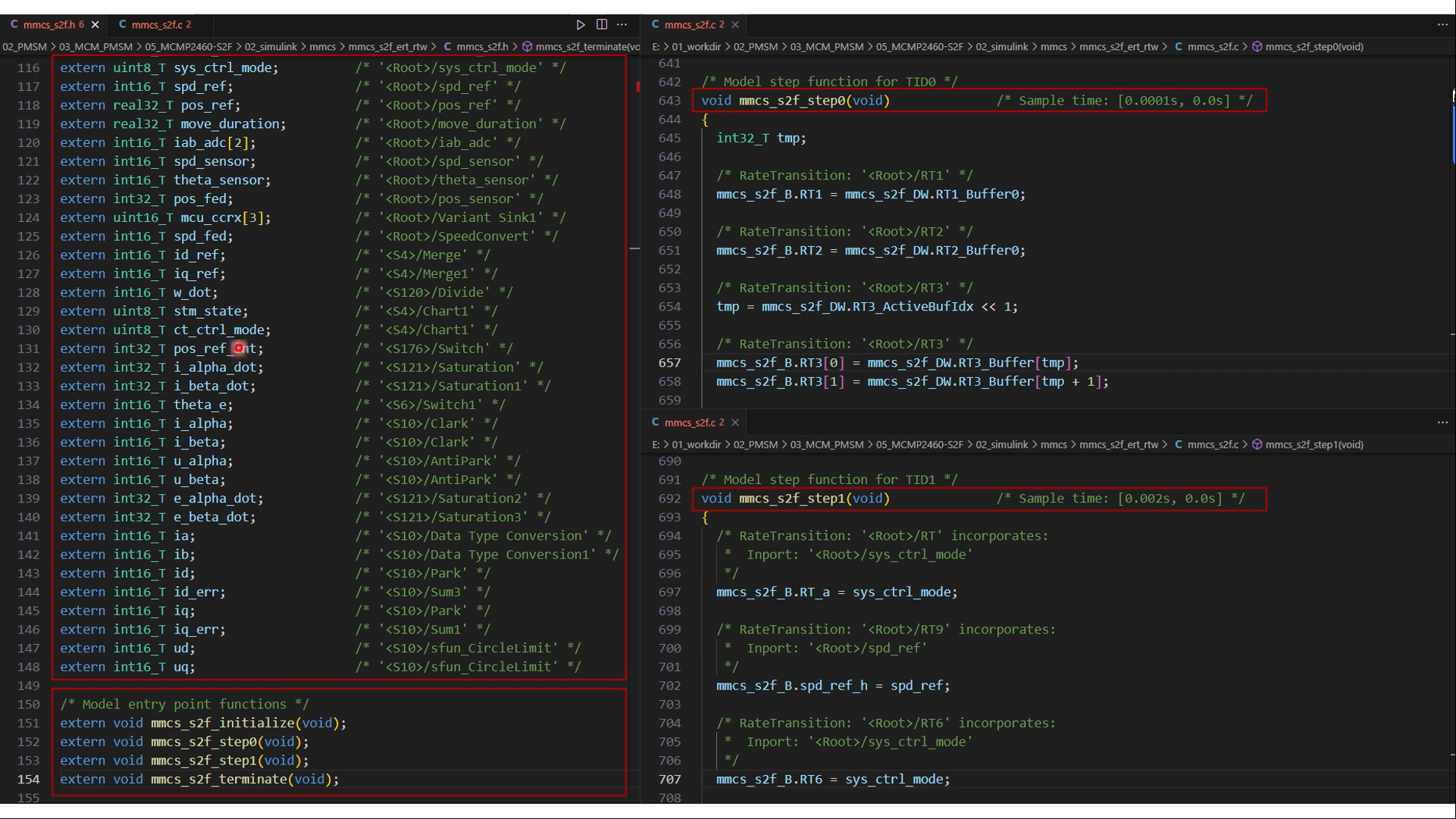
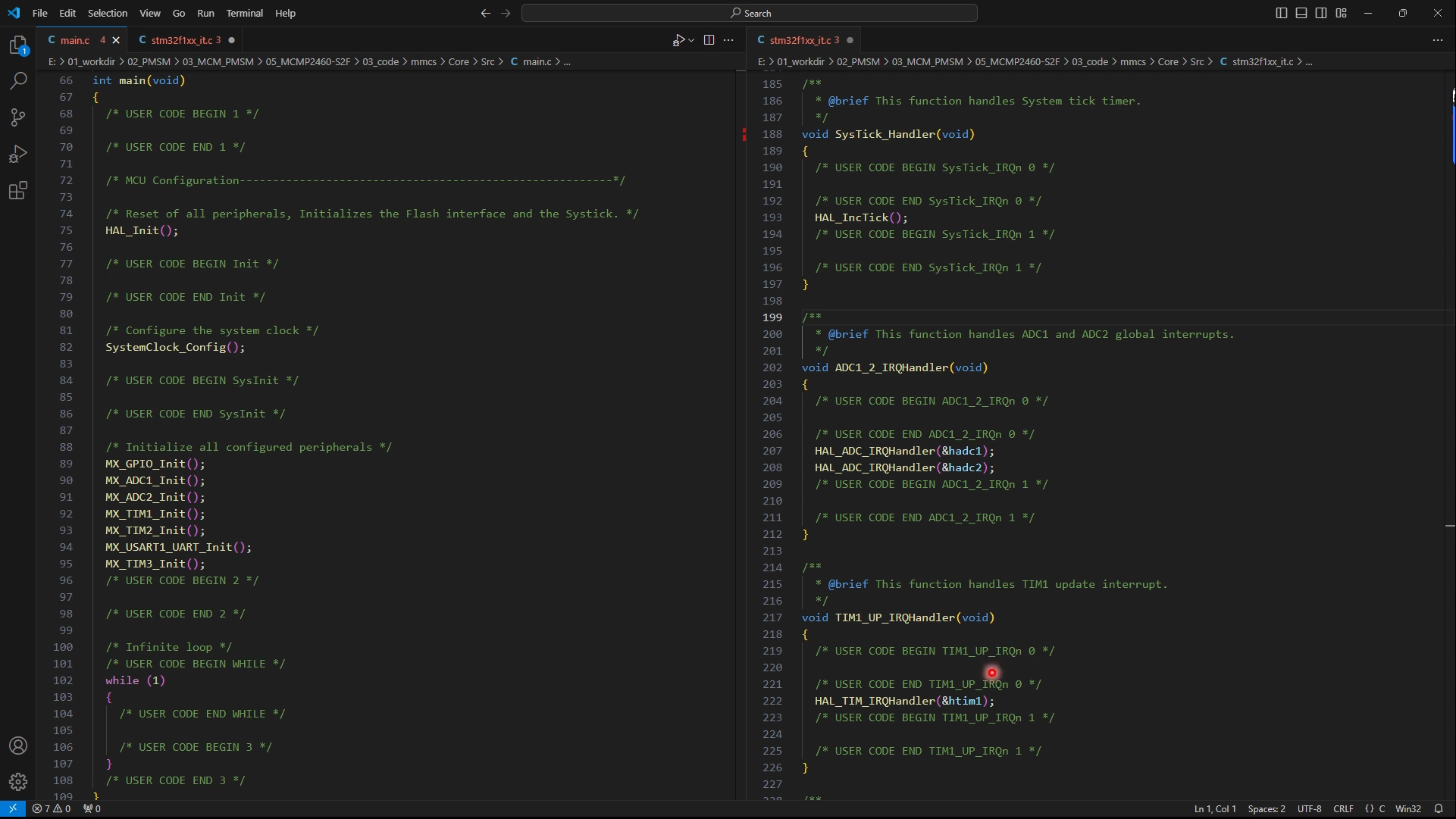
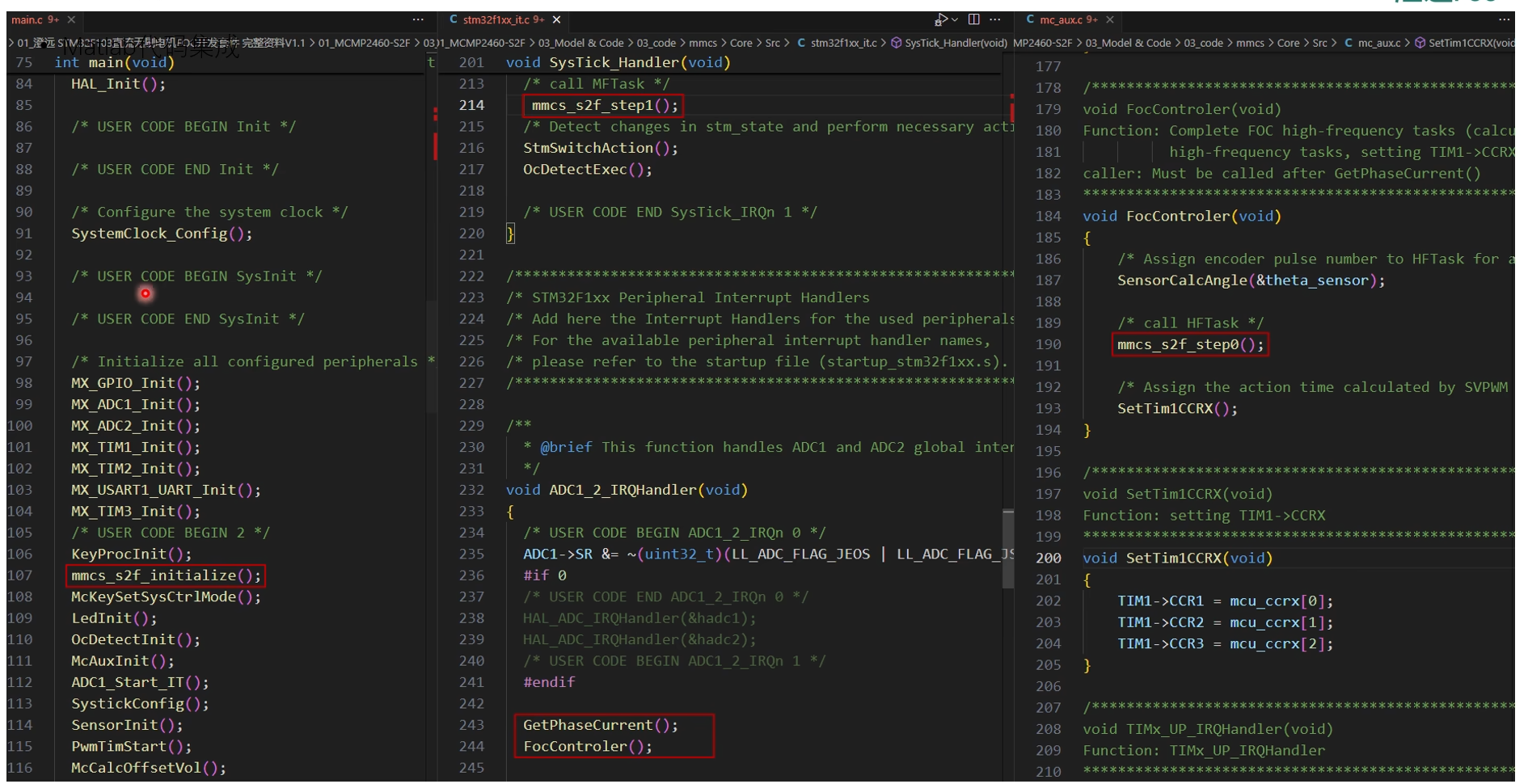
simulink生成的代码有4个主要函数,系统的初始化与终止,中频任务函数,高频任务函数;
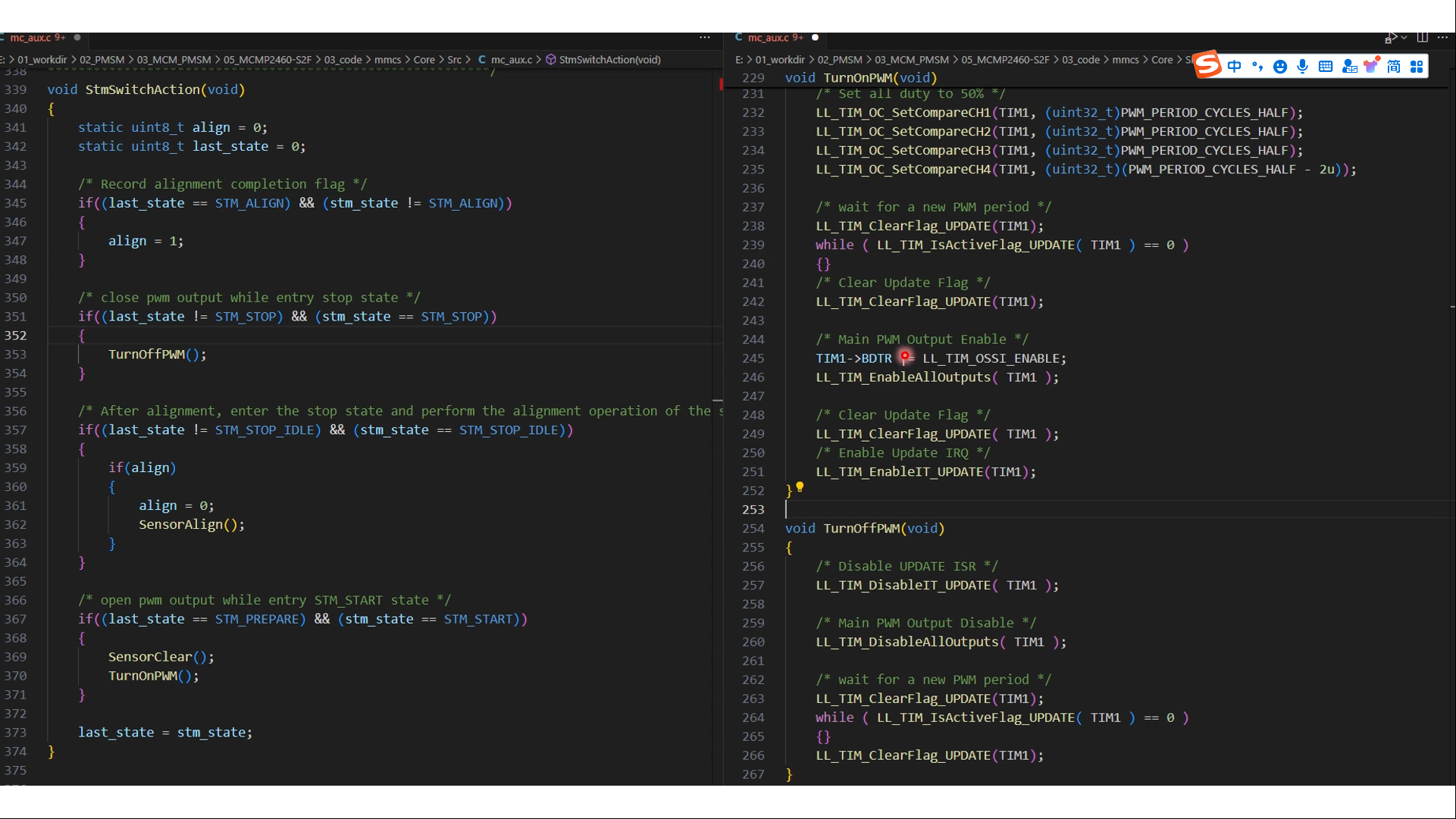
在systick中断函数调用中频任务及控制状态的切换,相关的保护函数;在adc中断函数调用获取相电流及Foc控制函数,高频任务在FOC控制函数中;
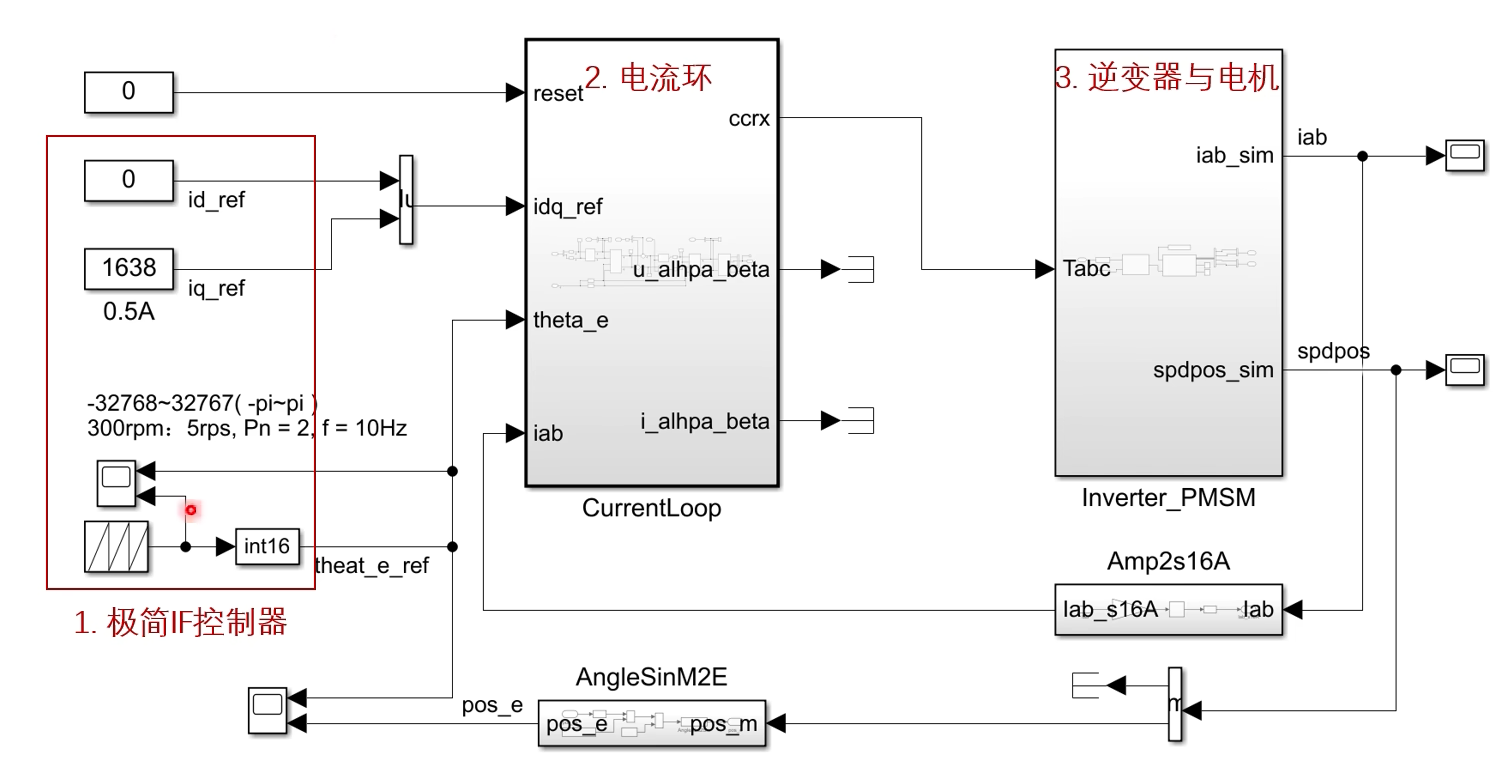
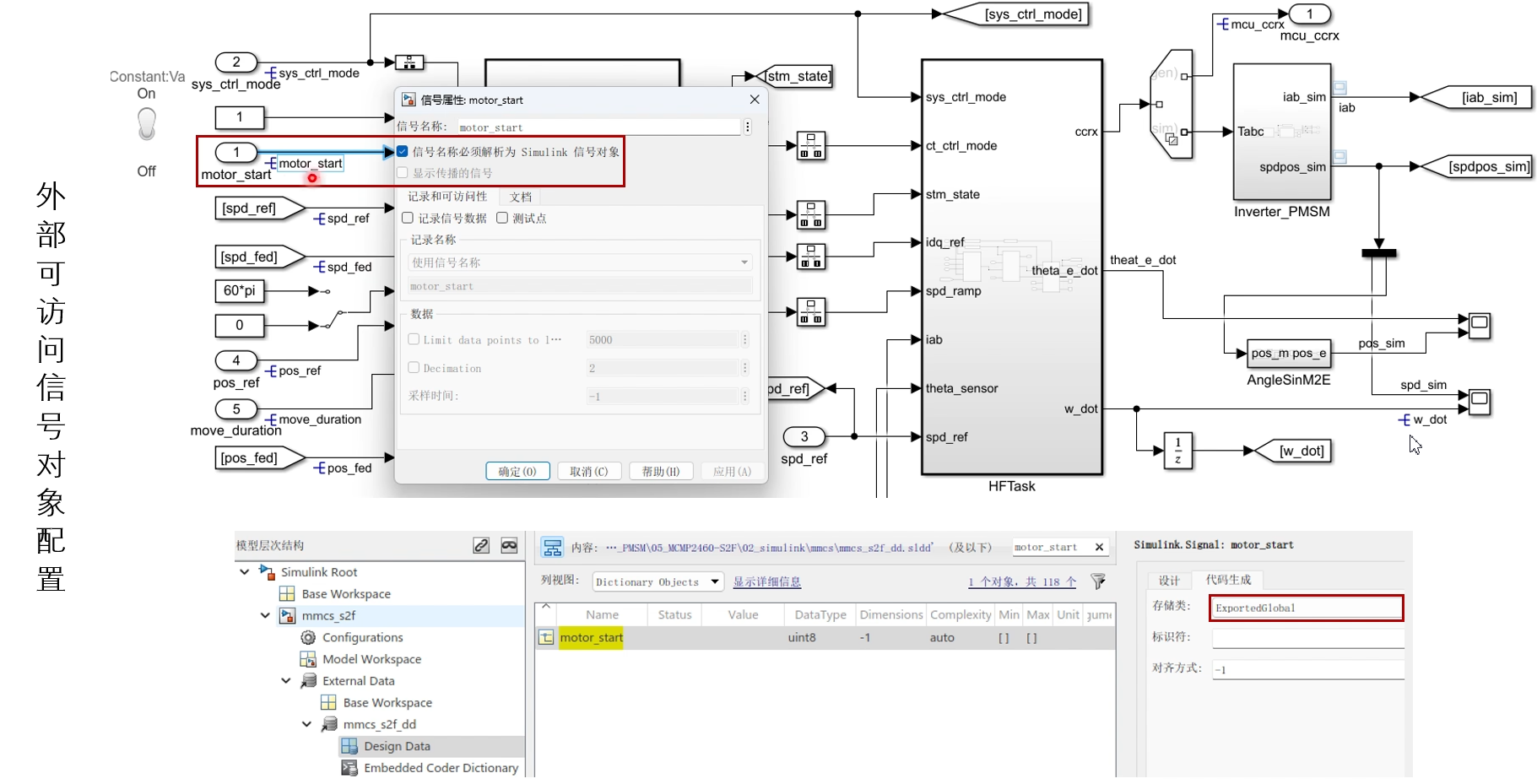
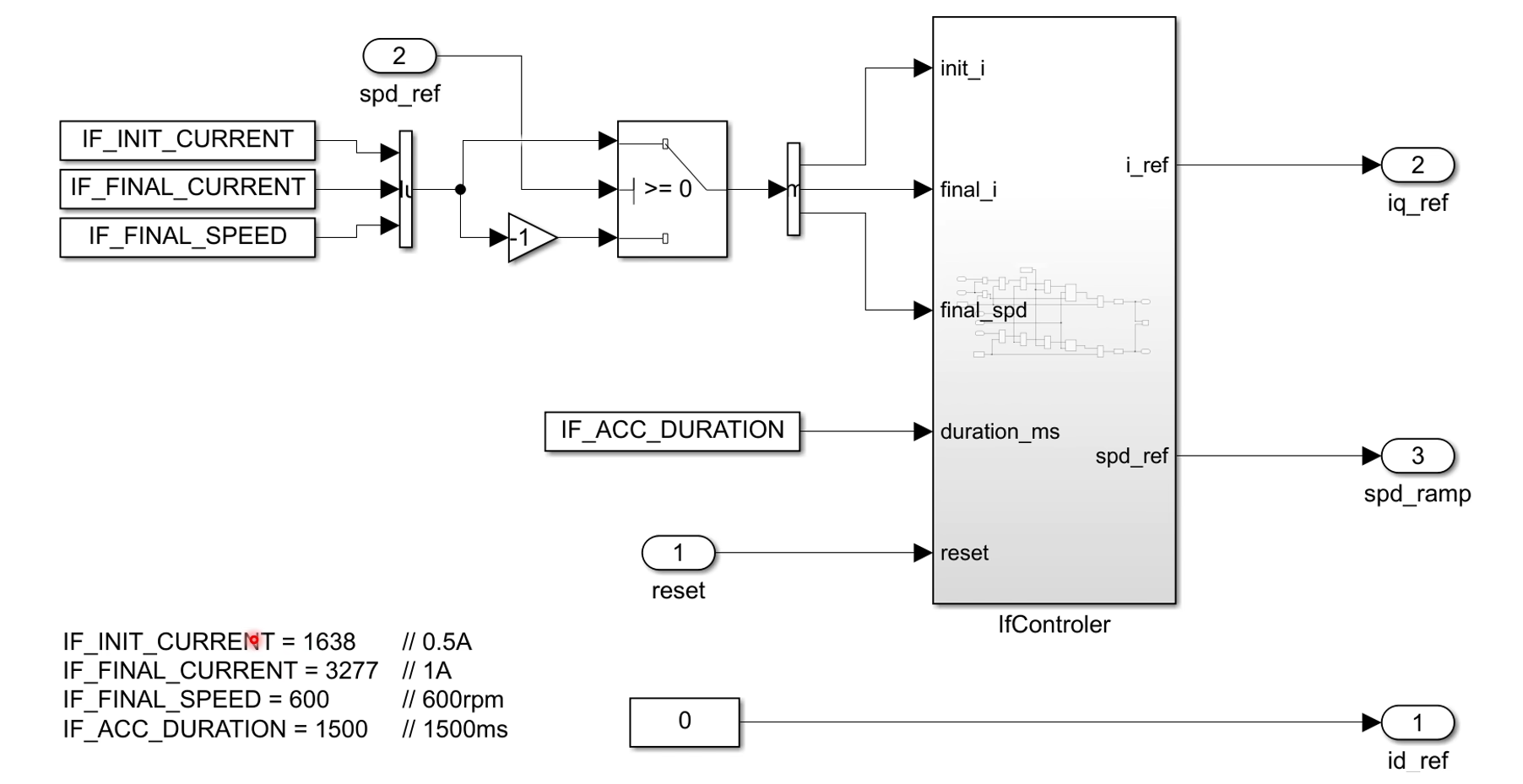
10、IF控制顶层模型
主要进行参数的输入与输出
11、IF控制器详解
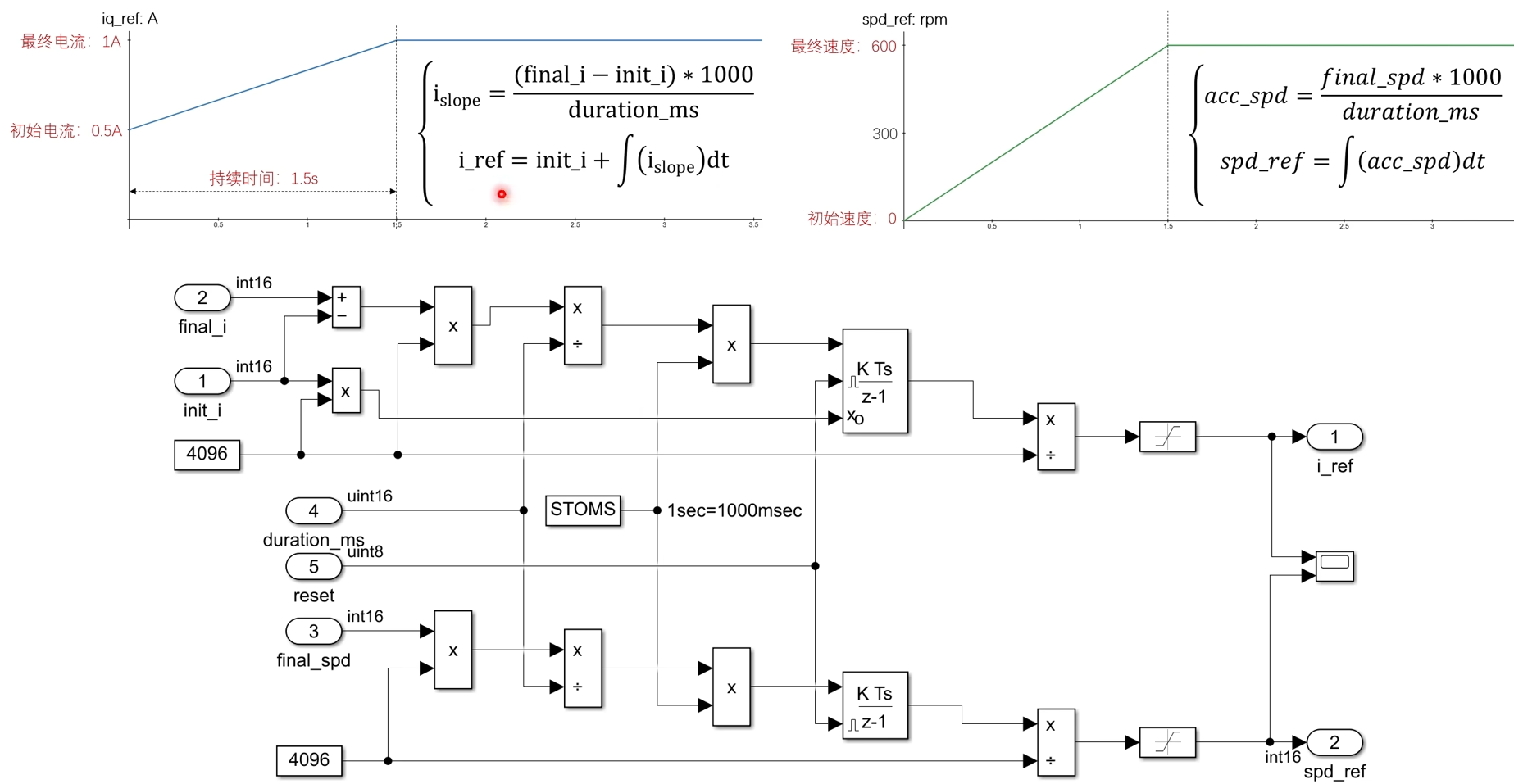
建模框架图里,上半部分是对电流建模的实现,下半部分是对速度建模的实现;