
模型矩阵、视图矩阵与投影矩阵
在3D图形渲染中,将虚拟三维世界的顶点最终投射到二维屏幕上,需要经过三次关键的坐标变换:模型变换(Model Transformation) 、视图变换(View Transformation) 和投影变换(Projection Transformation)。
对应的三个矩阵------模型矩阵(Model Matrix) 、视图矩阵(View Matrix) 和投影矩阵(Projection Matrix)(合称MVP矩阵),是连接3D空间与2D屏幕的"数学桥梁"。
本文将从坐标变换的本质出发,详细拆解这三个矩阵的数学原理、构建方法与工程实践,揭示它们如何协同完成"3D顶点→2D像素"的精准映射。
从"局部"到"屏幕"的链路
在3D渲染流水线中,一个顶点从被定义到最终显示在屏幕上,需要经历5个坐标系 的转换。而模型、视图、投影矩阵正是这一转换链路的核心驱动者:
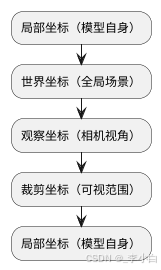
- 模型矩阵(M):负责"局部坐标→世界坐标"的转换,决定模型在全局场景中的位置、姿态和大小;
- 视图矩阵(V):负责"世界坐标→观察坐标"的转换,模拟相机的"视角"(位置和朝向);
- 投影矩阵(P):负责"观察坐标→裁剪坐标"的转换,定义相机的"可视范围"和"透视效果"。
这三个矩阵的组合(MVP = P×V×M)是3D渲染的"黄金公式",所有3D引擎(如OpenGL、Unity、Unreal)的底层渲染逻辑都基于此。
模型矩阵(Model Matrix)
模型矩阵的核心作用是将模型的局部坐标(模型自身坐标系下的顶点)转换为世界坐标(全局场景坐标系下的顶点) 。它通过组合缩放(Scale) 、旋转(Rotation) 、平移(Translation) 三种基础变换,描述模型在世界中的大小、朝向和位置。
1. 局部坐标与世界坐标:为什么需要模型矩阵?
- 局部坐标 :模型在自身坐标系下的顶点坐标,原点通常位于模型几何中心(如立方体的中心、人物的重心),与世界无关。例如,一个立方体的局部坐标可能是
(-1,-1,-1)到(1,1,1),无论它在世界中如何移动,这些坐标始终不变。 - 世界坐标:全局场景的统一坐标系,原点是场景的"中心",所有模型的位置都通过世界坐标描述。例如,"玩家在(5,0,-3),敌人在(10,0,2)",通过世界坐标可确定模型间的相对位置。
模型矩阵的作用,就是将每个顶点的局部坐标"映射"到世界坐标,让分散的模型在全局场景中形成正确的空间关系。
2. 模型矩阵的组成:缩放→旋转→平移的组合
模型矩阵是缩放矩阵 、旋转矩阵 、平移矩阵 的乘积。由于矩阵乘法不满足交换律,变换顺序必须严格遵循"缩放→旋转→平移"(否则会导致非预期的扭曲,如平移后旋转会让模型绕世界原点而非自身中心旋转)。
(1)缩放矩阵(Scale Matrix):调整模型大小
缩放矩阵用于沿x、y、z轴按比例放大或缩小模型,公式如下(顶点以齐次坐标(x,y,z,1)表示,矩阵为4×4以便与平移矩阵兼容):
Mscale(sx,sy,sz)=sx0000sy0000sz00001M_{scale}(s_x, s_y, s_z) = \begin{bmatrix} s_x & 0 & 0 & 0 \\ 0 & s_y & 0 & 0 \\ 0 & 0 & s_z & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}Mscale(sx,sy,sz)= sx0000sy0000sz00001
s_x, s_y, s_z分别为x、y、z轴的缩放因子(s=1表示不缩放,s>1放大,0<s<1缩小);- 示例:将局部坐标
(1,2,3)沿x轴缩放2倍、y轴缩放0.5倍,结果为(2,1,3):
200000.50000100001×1231=2131\begin{bmatrix}2&0&0&0\\0&0.5&0&0\\0&0&1&0\\0&0&0&1\end{bmatrix} \times \begin{bmatrix}1\\2\\3\\1\end{bmatrix} = \begin{bmatrix}2\\1\\3\\1\end{bmatrix} 200000.50000100001 × 1231 = 2131
(2)旋转矩阵(Rotation Matrix):调整模型朝向
旋转矩阵用于让模型绕坐标轴旋转指定角度(右手定则:四指沿旋转方向,拇指指向轴正方向),常见的三个旋转矩阵如下:
-
绕x轴旋转θ角 (y、z分量变化):
MrotateX(θ)=10000cosθ−sinθ00sinθcosθ00001M_{rotateX}(θ) = \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & \cosθ & -\sinθ & 0 \\ 0 & \sinθ & \cosθ & 0 \\ 0 & 0 & 0 & 1 \\ \end{bmatrix}MrotateX(θ)= 10000cosθsinθ00−sinθcosθ00001 -
绕y轴旋转θ角 (x、z分量变化):
MrotateY(θ)=cosθ0sinθ00100−sinθ0cosθ00001M_{rotateY}(θ) = \begin{bmatrix} \cosθ & 0 & \sinθ & 0 \\ 0 & 1 & 0 & 0 \\ -\sinθ & 0 & \cosθ & 0 \\ 0 & 0 & 0 & 1 \\ \end{bmatrix}MrotateY(θ)= cosθ0−sinθ00100sinθ0cosθ00001 -
绕z轴旋转θ角 (x、y分量变化):
MrotateZ(θ)=cosθ−sinθ00sinθcosθ0000100001M_{rotateZ}(θ) = \begin{bmatrix} \cosθ & -\sinθ & 0 & 0 \\ \sinθ & \cosθ & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \\ \end{bmatrix}MrotateZ(θ)= cosθsinθ00−sinθcosθ0000100001 -
示例:将顶点
(1,0,0)绕z轴旋转90°(θ=π/2,cosθ=0,sinθ=1),结果为(0,1,0):**0−100100000100001×1001=0101∗∗\begin{bmatrix}0&-1&0&0\\1&0&0&0\\0&0&1&0\\0&0&0&1\end{bmatrix} \times \begin{bmatrix}1\\0\\0\\1\end{bmatrix} = \begin{bmatrix}0\\1\\0\\1\end{bmatrix}** 0100−100000100001 × 1001 = 0101 ∗∗
-
复合旋转:若需绕多个轴旋转(如先绕x轴再绕y轴),需将对应旋转矩阵相乘(
M = M_{rotateY} × M_{rotateX}),顺序不同结果不同(通常遵循"Z-X-Y"或"Y-X-Z"顺序,避免万向锁问题)。
(3)平移矩阵(Translation Matrix):调整模型位置
平移矩阵用于将模型沿x、y、z轴移动指定距离,公式如下:
Mtranslate(tx,ty,tz)=100tx010ty001tz0001M_{translate}(t_x, t_y, t_z) = \begin{bmatrix} 1 & 0 & 0 & t_x \\ 0 & 1 & 0 & t_y \\ 0 & 0 & 1 & t_z \\ 0 & 0 & 0 & 1 \\ \end{bmatrix}Mtranslate(tx,ty,tz)= 100001000010txtytz1
t_x, t_y, t_z分别为x、y、z轴的平移距离;- 示例:将顶点
(1,2,3)沿x轴平移5、z轴平移-2,结果为(6,2,1):
10050100001−20001×1231=6211\begin{bmatrix}1&0&0&5\\0&1&0&0\\0&0&1&-2\\0&0&0&1\end{bmatrix} \times \begin{bmatrix}1\\2\\3\\1\end{bmatrix} = \begin{bmatrix}6\\2\\1\\1\end{bmatrix} 10000100001050−21 × 1231 = 6211
(4)模型矩阵的组合:严格遵循"缩放→旋转→平移"
模型矩阵的完整构建公式为:
M = M_{translate} × M_{rotate} × M_{scale}
-
计算逻辑:顶点先经过缩放,再旋转,最后平移(矩阵乘法从右向左执行);
-
示例:一个模型先沿各轴缩放0.5倍,再绕y轴旋转90°,最后平移到
(10,0,5),其模型矩阵为:java// 伪代码:使用GLM库构建模型矩阵 glm::mat4 model = glm::mat4(1.0f); // 单位矩阵(初始状态) model = glm::translate(model, glm::vec3(10, 0, 5)); // 平移(最后执行) model = model * glm::rotate(glm::radians(90.0f), glm::vec3(0, 1, 0)); // 旋转(中间执行) model = model * glm::scale(glm::vec3(0.5f, 0.5f, 0.5f)); // 缩放(最先执行)
3. 模型矩阵的工程意义:让场景"活"起来
- 静态模型:模型矩阵固定(如地面、建筑);
- 动态模型:通过实时更新模型矩阵实现动画(如人物移动、物体旋转);
- 实例化渲染:多个相同模型(如树木、敌人)可通过不同模型矩阵实现"一模多态",大幅提升渲染效率。
视图矩阵(View Matrix)
视图矩阵的核心作用是将世界坐标转换为观察坐标(以相机为中心的坐标)。
它本质是"将相机移动到世界原点,并调整朝向为默认方向(沿-z轴)"的逆变换------因为在3D渲染中,我们通常不"移动相机",而是通过"移动整个世界"来模拟相机视角的变化。
1. 观察坐标:以相机为中心的"主观视角"
观察坐标系的原点是相机的位置,z轴负方向为相机的"视线方向"(OpenGL默认),x轴向右,y轴向上。在观察坐标中:
- 相机前方的物体z值为负(在视线方向上);
- 相机后方的物体z值为正(会被后续裁剪剔除);
- 所有顶点的坐标都表示"相对于相机的位置"。
2. 相机参数:定义视图矩阵的三要素
构建视图矩阵需要三个关键参数(相机的"三要素"):
eye:相机在世界坐标系中的位置((x_e, y_e, z_e));center:相机的目标点(看向的位置,(x_c, y_c, z_c));up:相机的上方向向量(通常为(0,1,0),即"头顶朝上")。
基于这三个参数,视图矩阵的构建分为两步:相机旋转 (调整朝向)和相机平移(移动到原点)。
3. 视图矩阵的数学构建:旋转+平移的逆变换
(1)第一步:计算相机的三个正交轴
首先根据相机参数计算观察坐标系的三个正交轴(确保x、y、z轴两两垂直):
- 视线方向(z轴) :
z_axis = normalize(eye - center)(指向相机后方,与视线方向相反); - 水平右方向(x轴) :
x_axis = normalize(cross(up, z_axis))(与视线方向垂直); - 垂直上方向(y轴) :
y_axis = cross(z_axis, x_axis)(确保与x、z轴正交)。
(normalize为归一化函数,cross为叉积运算)
(2)第二步:构建视图矩阵
视图矩阵是"旋转矩阵"与"平移矩阵"的乘积,公式如下:
mathV=xaxis.xyaxis.xzaxis.x−dot(xaxis,eye)xaxis.yyaxis.yzaxis.y−dot(yaxis,eye)xaxis.zyaxis.zzaxis.z−dot(zaxis,eye)0001math V = \begin{bmatrix} x_axis.x & y_axis.x & z_axis.x & -dot(x_axis, eye) \\ x_axis.y & y_axis.y & z_axis.y & -dot(y_axis, eye) \\ x_axis.z & y_axis.z & z_axis.z & -dot(z_axis, eye) \\ 0 & 0 & 0 & 1 \\ \end{bmatrix}mathV= xaxis.xxaxis.yxaxis.z0yaxis.xyaxis.yyaxis.z0zaxis.xzaxis.yzaxis.z0−dot(xaxis,eye)−dot(yaxis,eye)−dot(zaxis,eye)1
- 前3列是旋转矩阵:将世界坐标系旋转至与相机朝向一致;
- 第4列是平移矩阵:
-dot(x_axis, eye)等表示将相机位置平移到原点(抵消相机的世界坐标); dot为点积运算,用于计算平移距离。
4. 工程实践:用库函数快速构建视图矩阵
实际开发中无需手动计算矩阵,可使用图形库(如GLM、Unity的Matrix4x4.LookAt)直接构建:
java
// GLM库示例:构建视图矩阵
glm::vec3 eye(0.0f, 2.0f, 5.0f); // 相机位置:(0,2,5)
glm::vec3 center(0.0f, 0.0f, 0.0f); // 目标点:原点
glm::vec3 up(0.0f, 1.0f, 0.0f); // 上方向:y轴
glm::mat4 view = glm::lookAt(eye, center, up); // 直接生成视图矩阵- 效果:所有世界坐标的顶点会被"转换"为以
eye为原点、朝向center的观察坐标。
投影矩阵(Projection Matrix):定义相机的"可视范围"
投影矩阵的核心作用是将观察坐标转换为裁剪坐标,它定义了相机的"可视范围"(裁剪体)和"投影方式"(透视或正交),是实现"近大远小"等3D视觉效果的关键。
1. 裁剪坐标与NDC:投影矩阵的输出目标
- 裁剪坐标 :投影矩阵的输出,是齐次坐标
(x,y,z,w),需满足-w ≤ x ≤ w、-w ≤ y ≤ w、-w ≤ z ≤ w(超出范围的顶点会被裁剪); - 规范化设备坐标(NDC) :裁剪坐标经"透视除法"(
x/w, y/w, z/w)后得到,范围固定为[-1,1]×[-1,1]×[-1,1],是设备无关的标准化坐标。
投影矩阵的本质是"将观察坐标中的可视区域"映射到NDC范围。
2. 透视投影矩阵(Perspective Projection):模拟人眼视觉
透视投影会产生"近大远小"的效果(符合人眼视觉),适用于3D游戏、AR/VR等场景。其裁剪体是一个"视锥体"(frustum),由近裁剪面、远裁剪面和四个侧面组成。
(1)透视投影的参数
构建透视投影矩阵需要四个参数:
fov:垂直视场角(如60°,视野越广,能看到的范围越大);aspect:屏幕宽高比(width/height,避免画面拉伸);near:近裁剪面距离(相机前方最近可视距离,必须>0);far:远裁剪面距离(相机前方最远可视距离)。
(2)透视投影矩阵的公式
Ppersp=1tan(fov/2)×aspect00001tan(fov/2)0000−far+nearfar−near−2×far×nearfar−near00−10P_{persp} = \begin{bmatrix} \frac{1}{\tan(fov/2) \times aspect} & 0 & 0 & 0 \\ 0 & \frac{1}{\tan(fov/2)} & 0 & 0 \\ 0 & 0 & -\frac{far + near}{far - near} & -\frac{2 \times far \times near}{far - near} \\ 0 & 0 & -1 & 0 \\ \end{bmatrix}Ppersp= tan(fov/2)×aspect10000tan(fov/2)10000−far−nearfar+near−100−far−near2×far×near0
- 关键特性:
- x、y分量的变换:将视锥体横向、纵向范围映射到
[-1,1],aspect确保宽高比正确; - z分量的变换:将
[near, far]映射到NDC的[-1,1](注意负号,因观察坐标z轴负方向为视线); - w分量:等于
-z(观察坐标的z值),透视除法后,远处顶点的x、y会被缩小(实现近大远小)。
- x、y分量的变换:将视锥体横向、纵向范围映射到
3. 正交投影矩阵(Orthographic Projection):无透视效果
正交投影不会产生近大远小,物体大小与距离无关,适用于2D UI、工程图纸、CAD等场景。其裁剪体是一个"轴对齐的长方体"。
(1)正交投影的参数
构建正交投影矩阵需要六个参数(定义长方体的边界):
left、right:x轴方向的左右边界;bottom、top:y轴方向的上下边界;near、far:z轴方向的近远边界。
(2)正交投影矩阵的公式
Portho=2right−left00−right+leftright−left02top−bottom0−top+bottomtop−bottom00−2far−near−far+nearfar−near0001P_{ortho} = \begin{bmatrix} \frac{2}{right - left} & 0 & 0 & -\frac{right + left}{right - left} \\ 0 & \frac{2}{top - bottom} & 0 & -\frac{top + bottom}{top - bottom} \\ 0 & 0 & -\frac{2}{far - near} & -\frac{far + near}{far - near} \\ 0 & 0 & 0 & 1 \\ \end{bmatrix}Portho= right−left20000top−bottom20000−far−near20−right−leftright+left−top−bottomtop+bottom−far−nearfar+near1
- 关键特性:
- x、y、z分量均为线性变换,直接将长方体范围映射到NDC的
[-1,1]; - w分量恒为1,透视除法后坐标不变,无透视效果。
- x、y、z分量均为线性变换,直接将长方体范围映射到NDC的
4. 工程实践:构建投影矩阵的库函数
java
// GLM库示例:构建透视投影矩阵
float fov = glm::radians(60.0f); // 垂直视场角60°(转换为弧度)
float aspect = 16.0f / 9.0f; // 16:9宽高比
float near = 0.1f; // 近裁剪面0.1
float far = 1000.0f; // 远裁剪面1000
glm::mat4 projection = glm::perspective(fov, aspect, near, far);
// 构建正交投影矩阵(如2D UI,范围x:[-10,10], y:[-10,10], z:[-1,1])
glm::mat4 orthoProjection = glm::ortho(-10.0f, 10.0f, -10.0f, 10.0f, -1.0f, 1.0f);MVP矩阵的组合与渲染流水线中的应用
模型、视图、投影矩阵并非孤立存在,它们的组合(MVP矩阵)是3D渲染流水线的核心输入,决定了顶点从局部坐标到裁剪坐标的完整转换。
1. MVP矩阵的组合规则:P×V×M
由于矩阵乘法的"右结合性",顶点的转换公式为:
裁剪坐标 = P × V × M × 局部坐标
- 计算顺序:局部坐标先乘M(到世界坐标),再乘V(到观察坐标),最后乘P(到裁剪坐标);
- 矩阵组合顺序:
MVP = P × V × M(先构建M,再V,最后P,按P×V×M顺序相乘)。
2. 在顶点着色器中的应用
在OpenGL/GLSL中,MVP矩阵通常作为uniform变量传入顶点着色器,直接用于转换顶点:
glsl
// 顶点着色器(GLSL 300 es)
#version 300 es
uniform mat4 u_MVPMatrix; // MVP矩阵(外部传入)
in vec4 a_Position; // 局部坐标顶点(输入)
void main() {
gl_Position = u_MVPMatrix * a_Position; // 计算裁剪坐标(内置输出)
}gl_Position是顶点着色器的内置输出变量,存储裁剪坐标,后续会经透视除法转换为NDC。
3. MVP矩阵的工程意义
- 性能优化:CPU端预计算MVP矩阵,避免在顶点着色器中执行多次矩阵乘法(GPU更擅长并行处理顶点,而非复杂矩阵运算);
- 渲染控制:通过修改MVP矩阵的组成,可实现丰富的视觉效果(如缩放场景、旋转相机、切换透视/正交模式)。
常见问题与避坑指南
1. 模型位置异常(偏移、缩放错误)
- 可能原因 :
- 模型矩阵变换顺序错误(如先平移后旋转,导致模型绕世界原点旋转);
- 缩放因子为0或负数(导致模型消失或镜像翻转)。
- 解决方案 :严格遵循"缩放→旋转→平移"的顺序;确保缩放因子为正数且合理(如
0.1~10)。
2. 相机视角异常(模型颠倒、视野过窄)
- 可能原因 :
- 视图矩阵的
up向量设置错误(如(0,-1,0)导致画面颠倒); fov过大(如180°导致鱼眼效果)或过小(如10°导致视野过窄)。
- 视图矩阵的
- 解决方案 :
up向量通常设为(0,1,0);fov建议在45°~60°(人眼舒适范围)。
3. 透视效果异常(模型拉伸、近大远小不明显)
- 可能原因 :
- 透视投影的
aspect与屏幕宽高比不匹配(如屏幕16:9,aspect设为4:3导致拉伸); near与far差距过大(如near=0.1, far=10000导致远裁剪面附近精度不足,z-fighting)。
- 透视投影的
- 解决方案 :
aspect严格等于screenWidth/screenHeight;far不宜过大(根据场景需求设置,如室内场景设为100)。
4. 矩阵乘法顺序错误(最常见的坑)
- 错误示例 :将MVP矩阵写为
M×V×P,导致顶点先经投影变换,再视图变换,最后模型变换,完全违背坐标转换逻辑; - 正确逻辑 :
MVP = P×V×M,顶点变换顺序为"局部→世界→观察→裁剪"。
总结
模型矩阵、视图矩阵、投影矩阵是3D渲染的"三大支柱":
- 模型矩阵定义了模型在世界中的"姿态"(大小、朝向、位置),是场景构建的基础;
- 视图矩阵模拟了相机的"视角",让3D世界有了"主观观察点";
- 投影矩阵 决定了"可视范围"和"透视效果",是连接3D空间与2D屏幕的最后一步。
