15.【NXP 号令者RT1052】开发------实战-XBAR
上一章,我们介绍了如何使用 RT1052 的四定时器 QTMR4 的通道 3 来产生 PWM 输出,不过由于该 PWM 的输出脚,不在 LED 脚上,所以需要一根杜邦线来飞线。本章,我们介绍RT1052 的内部外设交错开关(XBAR),并通过其来将 QTMR4 通道 3 的 PWM 输出和 DS0 所在的 IO 口在芯片内部连接起来,这样我们就不需要使用杜邦线了。
15.1 XBAR 简介
XBAR 是 RT1052 芯片自带的内部外设交错开关矩阵,它可以将 RT1052 内部外设的输出(或 IO 口的输入)映射到另外一部分内部外设的输入(或 IO 口的输出)上,从而实现各种外设和 IO 之间的交错互联。
RT1052 内部总共有 3 个外设交错开关矩阵:XBAR1、XBAR2 和 XBAR3。其中,XBAR1(也称 XBARA1)有 88 路输入,132 路输出;XBAR2(也称 XBARB2)有 64 路输入(只有 58路有效),16 路输出;XBAR3(也称 XBARB3)同样有 64 路输入(只有 58 路有效),16 路输出。
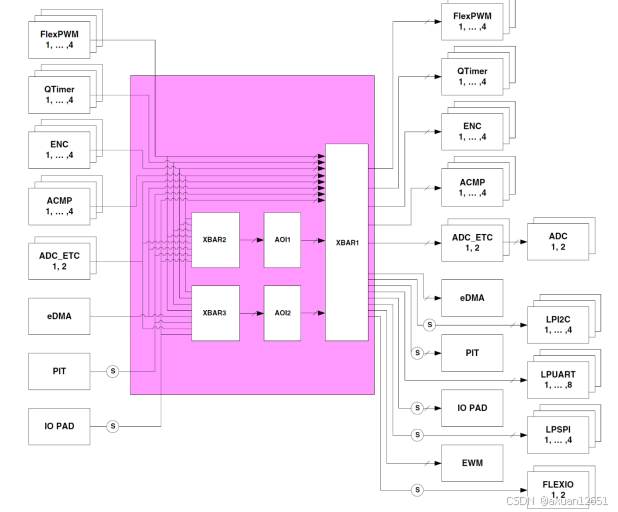
从图中可以看出,XBAR 分为:XBAR1、XBAR2 和 XBAR3,其中 XBAR2 和 XBAR3 的输出经过 AOI1 和 AOI2 后,进入 XBAR1,最终才输出到各个外设/GPIO。因此,XBAR2 和XBAR3 必须搭配 AOI1 和 AOI2 以及 XBAR1 才可以正常使用。这里 AOI1 和 AOI2 是 RT1052内部的两个与或非模块,可以对 XBAR2 和 XBAR3 的输出做与或非处理后,输入到 XBAR1 的输入,再输出到各个外设和 GPIO。
图中,左侧信号是 XBAR 的输入信号,右侧是 XBAR 的输出信号。在图中列出来的这些外设就可以使用 XBAR 来做交错连接,比如:QTIM4 我们就可以使用 XBAR 来交错连接,从而改变 QTIM4 通道 3 的 PWM 输出 IO 口
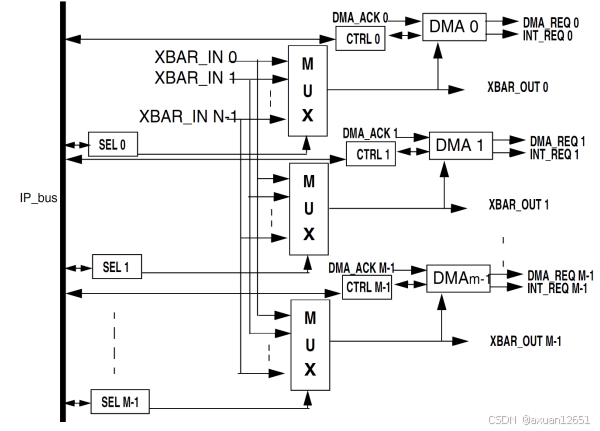 图中 XBAR_Inn(n=0~N-1)代表 XBAR 的 N 路输入信号,XBAR_OUTm(m=0~M-1)代表 XBAR 的 M 路输出信号;MUX 是复用选择器,用于在 N 路输入里面选 1 路,由 SELm 寄存器控制;CTRLm 则控制 XBAR_OUTm 的触发边沿以及中断/DMA 设置。注意,中断/DMA触发仅 XBAROUT0~ XBAROUT3 支持,其他输出通道不支持!
图中 XBAR_Inn(n=0~N-1)代表 XBAR 的 N 路输入信号,XBAR_OUTm(m=0~M-1)代表 XBAR 的 M 路输出信号;MUX 是复用选择器,用于在 N 路输入里面选 1 路,由 SELm 寄存器控制;CTRLm 则控制 XBAR_OUTm 的触发边沿以及中断/DMA 设置。注意,中断/DMA触发仅 XBAROUT0~ XBAROUT3 支持,其他输出通道不支持!
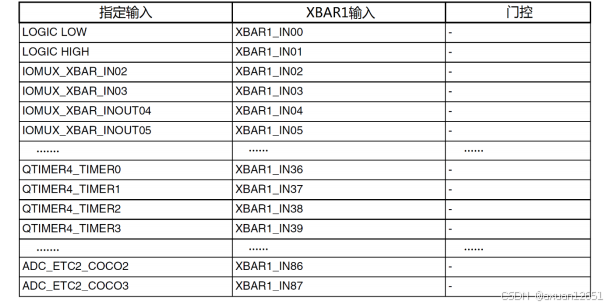
该表描述了 XBAR1_Inn(n=0~87)的 88 个输入通道所对应的输入信号源(指定输入),不过上表我们只列出了一部分内容,完整的映射关系,见《RT1050 参考手册》第 239 页 3.4 节,Table 3-3。如表所示:QTMR4 通道 3 的输出,就被指定在 XBAR1_IN39 上,如果我们设置 SELx选择 XBAR1 输入通道 39(XBAR1_IN39)其实就是选择 QTMR4 通道 3 的输出作为 XBAR1 的输入。
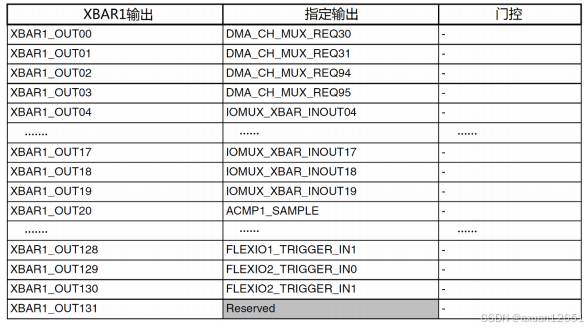
该表描述了 XBAR1_OUTm(m=0~131)的 132 个输出通道所对应的目标信号(指定输出),不过上表我们也只列出了一部分内容,完整的映射关系,见《RT1050 参考手册》第 246 页 3.3节,Table 3-6。如表所示:XBAR1_OUT17 就被指定到 IOMUX_XBAR_INOUT17 上。这里的 IOMUX_XBAR_INOUT17 是指 XBAR 的输入/输出通道 17(二选一),它可以通过IOMUX 的设置,映射到 XBAR1_INOUT17 复用功能上,最终使用:GPIO1_IO03、GPIO1_IO05、GPIO2_IO19 和 GPIO4_IO08 等(由 IOMUX 设置)作为 XBAR 的输入/输出使用。经过以上了解,我们可以得出 XBAR1 的特点如下:
- 支持 88 路输入和 132 路输出;
- 任意一路输出都可以独立选择 88 路输入里面的任意一路;
- 支持边沿检测,并可以触发中断/DMA(仅前 4 个输出通道支持);
- 具有独立的选择设置寄存器(SELx/CTRLy,x=0~651,y=0/1);
注 1:这里的 SELx 寄存器每个控制 2 路输入,所以总共只要 66 个寄存器,就可以设置 132 路
输入。
本章,我们将使用 XBAR1 来实现把 QTMR4 通道 3 的输出,映射到 DS0(GPIO1_IO03)上,从而 QTMR4 通道 3 的 PWM 输出可以直接驱动板载的 DS0,而不需要通过杜邦线连接。经过前面的学习,我们知道 QTMR4 通道 3 是连接在 XBAR1_IN39 上面的,而 GPIO1_IO03则可以复用成 XBAR1_INOUT17,因此,我们只需要将 XBAR1 输出通道 17 的输入选择设置为XBAR1_IN39 即可实现这个功能。
本章,我们需要用到 2 个寄存器:XBARAx_SEL8 和 IOMUXC_GPR_GPR6,接下来我们分别介绍这两个寄存器。
实验目标
将 QTMR4 通道 3 的输出通过 XBARA1 路由到 XBAR1_INOUT17 ,再映射到 GPIO1_IO03 (DS0),实现 PWM 信号直接驱动 DS0,而无需杜邦线飞线。
配置步骤
1. 设置 GPIO1_IO03 复用功能
c
//GPIO_AD_B0_03 配置为 ALT1,即 XBAR1_INOUT17
IOMUXC_SetPinMux(IOMUXC_GPIO_AD_B0_03_XBAR1_INOUT17,0);2. 使能 XBARA1 时钟
c
CLOCK_EnableClock(kCLOCK_Xbar1);实际上
XBARA_Init()内部已调用,无需重复。
3. 初始化 XBARA1
c
XBARA_Init(XBARA1); //初始化 XBARA14. 设置 IOMUXC_GPR_GPR6
- 配置寄存器
IOMUXC_GPR_GPR6,将 IOMUXC_XBAR_DIR_SEL_17 位置 1。 - 设置 XBAR_INOUT17 为输出模式。
5. 设置 XBARA1 信号连接
使用 XBARA_SetSignalsConnection 将 QTMR4 通道 3 输出 连接到 XBAR1_INOUT17:
c
XBARA_SetSignalsConnection(XBARA1,
kXBARA1_InputQtimer4Tmr3Output,
kXBARA1_OutputIomuxXbarInout17);参数说明
- 输入信号枚举 (xbar_input_signal_t)
- 包含 XBAR1、XBAR2、XBAR3 的输入通道定义,共 204 个通道。
- 本例选择
kXBARA1_InputQtimer4Tmr3Output,即 QTMR4 通道 3 的输出。
- 输出信号枚举 (xbar_output_signal_t)
- 包含 XBAR1、XBAR2、XBAR3 的输出通道定义,共 163 个通道。
- 本例选择
kXBARA1_OutputIomuxXbarInout17,即输出到 XBAR1_INOUT17。
本例程我们要操作的是XBARA1。第二个参数看名字就知道是设置要连接的输入信号,参数类型为 xbar_input_signal_t,
这是一个枚举类型,在文件 MIMXRT1052.h 中有如下定义:
输入信号枚举 (xbar_input_signal_t)
c
typedef enum _xbar_input_signal
{
kXBARA1_InputLogicLow = 0|0x100U, // LOGIC_LOW → XBARA1_IN0
kXBARA1_InputLogicHigh = 1|0x100U, // LOGIC_HIGH → XBARA1_IN1
kXBARA1_InputIomuxXbarIn02 = 2|0x100U, // IOMUX_XBAR_IN02 → XBARA1_IN2
...
kXBARA1_InputAdcEtcXbar1Coco2 = 86|0x100U, // ADC_ETC_XBAR1_COCO2 → XBARA1_IN86
kXBARA1_InputAdcEtcXbar1Coco3 = 87|0x100U, // ADC_ETC_XBAR1_COCO3 → XBARA1_IN87
kXBARB2_InputLogicLow = 0|0x200U, // LOGIC_LOW → XBARB2_IN0
kXBARB2_InputLogicHigh = 1|0x200U, // LOGIC_HIGH → XBARB2_IN1
kXBARB2_InputRESERVED2 = 2|0x200U, // 保留
...
kXBARB2_InputDmaDone6 = 56|0x200U, // DMA_DONE6 → XBARB2_IN56
kXBARB2_InputDmaDone7 = 57|0x200U, // DMA_DONE7 → XBARB2_IN57
kXBARB3_InputLogicLow = 0|0x300U, // LOGIC_LOW → XBARB3_IN0
kXBARB3_InputLogicHigh = 1|0x300U, // LOGIC_HIGH → XBARB3_IN1
kXBARB3_InputRESERVED2 = 2|0x300U, // 保留
...
kXBARB3_InputDmaDone6 = 56|0x300U, // DMA_DONE6 → XBARB3_IN56
kXBARB3_InputDmaDone7 = 57|0x300U // DMA_DONE7 → XBARB3_IN57
} xbar_input_signal_t;- 通道数量
- XBARA1:0 ~ 87,共 88 个输入通道
- XBARA2:0 ~ 57,共 58 个输入通道
- XBARA3:0 ~ 57,共 58 个输入通道
- 总计 204 个输入通道
- 示例
c
kXBARA1_InputLogicHigh = 1|0x100U; // LOGIC_HIGH → XBARA1_IN1表示 XBARA1 的输入通道 1(XBARA1_IN1),信号源为逻辑高电平。
- 本例程选择
c
kXBARA1_InputQtimer4Tmr3Output即 QTMR4 通道 3 的输出作为 XBARA1 的输入信号。
输出信号枚举 (xbar_output_signal_t)
c
typedef enum _xbar_output_signal
{
//XBARA1_OUT0 → DMA_CH_MUX_REQ30
kXBARA1_OutputDmaChMuxReq30 = 0|0x100U,
//XBARA1_OUT1 → DMA_CH_MUX_REQ31
kXBARA1_OutputDmaChMuxReq31 = 1|0x100U,
//XBARA1_OUT2 → DMA_CH_MUX_REQ94
kXBARA1_OutputDmaChMuxReq94 = 2|0x100U,
... //省略部分定义
//XBARA1_OUT129 → FLEXIO2_TRIGGER_IN0
kXBARA1_OutputFlexio2TriggerIn0 = 129|0x100U,
//XBARA1_OUT130 → FLEXIO2_TRIGGER_IN1
kXBARA1_OutputFlexio2TriggerIn1 = 130|0x100U,
kXBARB2_OutputAoi1In00 = 0|0x200U, //XBARB2_OUT0 AOI1_IN00
kXBARB2_OutputAoi1In01 = 1|0x200U, //XBARB2_OUT1 AOI1_IN01
... //省略部分定义
kXBARB2_OutputAoi1In14 = 14|0x200U, //XBARB2_OUT14 AOI1_IN14
kXBARB2_OutputAoi1In15 = 15|0x200U, //XBARB2_OUT15 AOI1_IN15
kXBARB3_OutputAoi2In00 = 0|0x300U, //XBARB3_OUT0 AOI2_IN00
kXBARB3_OutputAoi2In01 = 1|0x300U, //XBARB3_OUT1 AOI2_IN01
... //省略部分定义
kXBARB3_OutputAoi2In14 = 14|0x300U, //XBARB3_OUT14 AOI2_IN14
kXBARB3_OutputAoi2In15 = 15|0x300U //XBARB3_OUT15 AOI2_IN15
} xbar_output_signal_t;- 通道数量
- XBARA1:0 ~ 130,共 131 个输出通道
- XBARA2:0 ~ 15,共 16 个输出通道
- XBARA3:0 ~ 15,共 16 个输出通道
- 总计 163 个输出通道
- 示例
c
kXBARA1_OutputFlexio2TriggerIn0 = 129|0x100U;表示 XBARA1 的输出通道 129(XBARA1_OUT129),将输出到 FLEXIO2_TRIGGER_IN0。
- 本例程选择
c
kXBARA1_OutputIomuxXbarInout17即输出到 XBAR1_INOUT17。
信号连接代码
c
XBARA_SetSignalsConnection(XBARA1,
kXBARA1_InputQtimer4Tmr3Output,
kXBARA1_OutputIomuxXbarInout17);15.2 硬件设计
本实验用到的硬件资源有:
- 指示灯 DS0
- QTMR4 通道 3 定时器
本章将通过 QTMR4 的通道 3 来控制 DS0 的亮灭,DS0 是连接到 GPIO1_IO03(P103)上的,这个前面已经有介绍了。而 QTMR4 通道 3 的输出默认是连接在 GPIO2_IO27(P227)上的。本来是需要一根杜邦线连接 GPIO2_IO27 和 GPIO1_IO03 的,但是经过我们 XBARA1 的配置,就可以把 QTMR4 通道 3 的输出直接映射到 GPIO1_IO03 上面了,不需要经过 GPIO2_IO27也无需使用杜邦线条线。
15.3 软件设计
本章,我们依旧是在前一章的基础上修改代码,先打开之前的工程,然后在 HARDWARE文件夹下新建 XBAR 文件夹。然后打开 USER 文件夹下的工程,新建一个 xbar.c 的文件和 xbar.h的头文件,保存在 XBAR 文件夹下,并将 XBAR 文件夹加入头文件包含路径
xbar.c
c
#include "xbar.h"
#include "lpuart.h"
//设置XBARA1的信号连接关系
//input: XBARA_INn选择,低8位有效,范围:0~87,参见xbar_input_signal_t的枚举值.
//output: XBARA_OUTx编号,低8位有效,范围:0~130, 参见xbar_output_signal_t的枚举值.
//详细的对应表,见:<<RT1052英文参考手册>>Table 3-5 和 Table 3-6
void XBARA1_Signal_Set(xbar_input_signal_t input, xbar_output_signal_t output)
{
u8 outx;
outx=output&0XFF; //得到真正的XBARA_OUT编号.
if(outx>3&&outx<20)IOMUXC_GPR->GPR6|=1<<(12+outx); //GPIO做输出,则设置对应的I0为输出模式
XBARA_Init(XBARA1); //初始化XBARA1
XBARA_SetSignalsConnection(XBARA1,input,output); //设置输入和输出连接
}XBARA1_Signal_Set 函数,用于设置 XBAR1 的信号连接关系(映射关系),实际上就是设置 IOMUXC_GPR->GPR6 和 XBARA1->SELx 寄存器,该函数支持任意 XBARA1 通道的配置。
xbar.h
c
#ifndef _XBAR_H
#define _XBAR_H
#include "sys.h"
void XBARA1_Signal_Set(xbar_input_signal_t input, xbar_output_signal_t output);
#endifmain.c
c
#include "sys.h"
#include "lpuart.h"
#include "delay.h"
#include "led.h"
#include "key.h"
#include "exti.h"
#include "wdog.h"
#include "rtwdog.h"
#include "gptimer.h"
#include "pitimer.h"
#include "qtimer.h"
#include "pwm.h"
#include "xbar.h"
int main(void)
{
u8 key=0;
MPU_Memory_Protection(); //初始化MPU
RT1052_Clock_Init(); //配置系统时钟
DELAY_Init(600); //延时函数初始化
LPUART1_Init(115200); //初始化串口1
RT1052_NVIC_SetPriorityGrouping(NVIC_PRIORITYGROUP_4);//优先级分组4
#ifdef LED_DEBUG
u8 led0sta=1,led1sta=1; //LED0,LED1的当前状态
LED_Init(); //初始化LED
#endif
#ifdef KEY_DEBUG
KEY_Init(); //初始化KEY
#endif
#ifdef LPUART_DEBUG
u8 len; //接收数据长度
u16 times=0; //延时计数器
LED0(0); //先点亮红灯
#endif
#ifdef EXTIX_DEBUG
EXTIX_Init(); //初始化外部中断
#endif
#ifdef WDOG_DEBUG
WDOG1_Init(3,2); //初始化看门狗1,2秒溢出,提前1秒进入中断,方便喂狗
LED0(0); //先点亮LED灯
delay_ms(300); //延时300ms再初始化看门狗,LED0的变化"可见"
#endif
#ifdef RTWDOG_DEBUG
LED_Init(); //初始化LED
KEY_Init(); //初始化KEY
delay_ms(100); //延时100ms再初始化看门狗,LED0的变化"可见"
MYRTWDOG_Init(1,0,32768,0); //初始化RT看门狗,1秒溢出,非窗口模式
LED0(0); //先点亮LED灯
#endif
#ifdef GPT1_DEBUG
LED_Init(); //初始化LED
KEY_Init(); //初始化按键
GPT1_Int_Init(3750-1,10000); //设置GPT1 0.5秒钟产生一次中断
#endif
#ifdef PIT_DEBUG
LED_Init(); //初始化LED
PIT_CH0_Int_Init(75000000/2); //设置PIT 0.5秒钟产生一次中断
#endif
#ifdef QTMR_DEBUG
KEY_Init(); //初始化按键
LED_Init(); //初始化LED
QTMR1_CH0_Int_Init(15,46875); //设置QTMR1 0.04秒钟产生一次中断
#endif
#ifdef QTMR_PWM_DEBUG
u8 dir=1;
u16 led1pwmval=0;
gpio_pin_config_t led_config;
LED_Init(); //初始化LED
KEY_Init(); //初始化按键
//初始化PWM,定时器时钟为:150/64=2.34375Mhz,设置频率为5Khz,50%占空比
QTMR4_CH3_PWM_Init(14,5000,0);
//设置P103为输入模式,防止干扰PWM
led_config.direction=kGPIO_DigitalInput; //输出
led_config.interruptMode=kGPIO_NoIntmode; //不使用中断功能
led_config.outputLogic=0; //默认高电平,LED灯关闭
GPIO_PinInit(GPIO1,3,&led_config); //初始化GPIO1_3
#endif
u8 dir=1;
u16 led1pwmval=0;
//初始化PWM,定时器时钟为:150/64=2.34375Mhz,设置频率为5Khz,50%占空比
QTMR4_CH3_PWM_Init(14,5000,50);
IOMUXC_SetPinMux(IOMUXC_GPIO_AD_B0_03_XBAR1_INOUT17,0); //GPIO_AD_B0_03配置为ALT1,即XBAR1_INOUT17
XBARA1_Signal_Set(kXBARA1_InputQtimer4Tmr3Output,kXBARA1_OutputIomuxXbarInout17); //QTMR4_CH3输出到XBARA1_INOUT17上面.
//即:通过GPIO_AD_B0_03(GPIO1_IO03)输出QMR4_CH3的波形.
while(1)
{
delay_ms(10);
if(dir)led1pwmval++;
else led1pwmval--;
if(led1pwmval>=100)dir=0;
if(led1pwmval==0)dir=1;
QTMER4CH3_PWM_DutySet(14,5000,led1pwmval);
#ifdef QTMR_PWM_DEBUG
delay_ms(10);
if(dir)led1pwmval++;
else led1pwmval--;
if(led1pwmval>=100)dir=0;
if(led1pwmval==0)dir=1;
QTMER4CH3_PWM_DutySet(14,5000,led1pwmval);
#endif
#ifdef QTMR_DEBUG
LED0_Toggle;
delay_ms(1000);
#endif
#ifdef PIT_DEBUG
LED0_Toggle;
delay_ms(1000);
#endif
#ifdef GPT1_DEBUG
LED0_Toggle;
delay_ms(1000);
#endif
#ifdef RTWDOG_DEBUG
key=KEY_Scan(0);
if(key==WKUP_PRES) //如果按键按下,则喂狗.
{
RTWDOG_Feed();
}
delay_ms(10);
#endif
#ifdef WDOG_DEBUG
LED0(1); //关闭DS0,如不复位,DS0将一直处于关闭状态.
delay_ms(100);
#endif
#ifdef EXTIX_DEBUG
printf("Int example driver!\r\n");
delay_ms(1000);
#endif
#ifdef KEY_DEBUG
key=KEY_Scan(0); //得到键值
if(key)
{
switch(key)
{
case WKUP_PRES: //控制LED0,LED1互斥点亮
led1sta=!led1sta;
led0sta=!led1sta;
break;
case KEY2_PRES: //控制LED0翻转
led0sta=!led0sta;
break;
case KEY1_PRES: //控制LED1翻转
led1sta=!led1sta;
break;
case KEY0_PRES: //同时控制LED0,LED1翻转
led0sta=!led0sta;
led1sta=!led1sta;
break;
}
LED0(led0sta); //控制LED0状态
LED1(led1sta); //控制LED1状态
}else delay_ms(10);
#endif // KEY_DEBUG
#ifdef LPUART_DEBUG
if(LPUART_RX_STA&0x8000)
{
len=LPUART_RX_STA&0x3fff;//得到此次接收到的数据长度
printf("\r\n发送的消息为:\r\n");
LPUART_WriteBlocking(LPUART1,LPUART_RX_BUF,len);//发送接收到的数据
printf("\r\n\r\n");//插入换行
LPUART_RX_STA=0;
}else
{
times++;
if(times%5000==0)
{
printf("\r\nALIENTEK RT1052开发板 串口实验\r\n");
}
if(times%200==0)printf("请输入数据,以回车键结束\r\n");
if(times%30==0)LED0_Toggle;//闪烁LED,提示系统正在运行.
delay_ms(10);
}
#endif // LPUART_DEBUG
}
}编译,下载,结果与上一章结果相同。

总结
XBAR 的实现与传统杜邦线连接相比,最大的区别在于信号的传输方式:使用杜邦线时,QTMR4 通道 3 的 PWM 输出需要通过外部飞线物理连接到 DS0 所在的 GPIO 引脚,容易造成布线复杂、可靠性下降;而通过 XBAR 配置,可以在芯片内部直接将 QTMR4 通道 3 的输出映射到 GPIO1_IO03,实现 PWM 信号的内部路由,无需额外硬件连接,既简化了电路,又提升了稳定性和可维护性。因此,XBAR 的优势在于 内部互联、灵活映射、减少外部连线 ,而杜邦线方式则是 物理跳线、依赖外部连接 。
OK!谢谢大家!