在图像处理与计算机视觉中,颜色空间(Color Space)的选择对算法效果有着至关重要的影响。RGB 颜色空间虽然直观、常见,但由于其三个通道(红、绿、蓝)与人类对颜色的主观感知差异较大,因此在色彩分割、目标识别、颜色增强等任务中并非最优。为了解决 RGB 与人类视觉特性的不匹配问题,科学家提出了多种感知友好的颜色空间,其中 HSV(Hue-Saturation-Value) 与 HSL(Hue-Saturation-Lightness) 是最常用的两种。
RGB 颜色空间
RGB 模型以三种基色(Red、Green、Blue)的强度来表示颜色,每种颜色分量取值范围一般为 0, 255 或归一化为 0, 1。例如:
- (255, 0, 0):纯红;
- (0, 255, 0):纯绿;
- (0, 0, 255):纯蓝;
- (255, 255, 255):白色;
- (0, 0, 0):黑色。
RGB 模型的缺点在于:
- 明暗变化会同时影响三个通道;
- 人眼对色调(Hue)与亮度(Lightness/Value)的感知并非线性;
- 颜色分割或跟踪时受光照变化干扰大。
因此需要将颜色分解为更接近人类视觉的形式,即:色调(Hue) 、饱和度(Saturation) 与 亮度(Lightness/Value)。
HSV 模型原理
HSV 模型以三维圆锥体表示颜色空间:
- Hue(色调):颜色类型,如红、绿、蓝;在圆周上按角度表示(0°~360°),OpenCV 中缩放到 0,180。
- Saturation(饱和度):颜色纯度,表示颜色中灰度成分的多少,范围 0,1;
- Value(明度):颜色的亮度强度,对应颜色的"明亮"程度,范围 0,1。
在 HSV 模型中:
- 当 S=0 时,颜色为灰阶;
- 当 V=0 时,颜色为黑;
- Hue 决定了"是什么颜色",而 S、V 决定了"颜色有多浓、多亮"。
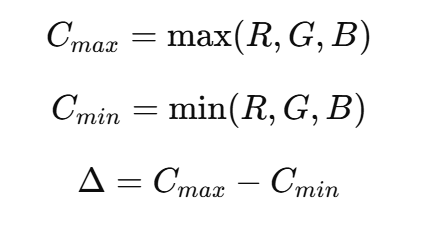
HSV 与 RGB 的转换公式
设 R, G, B ∈ 0,1,则:
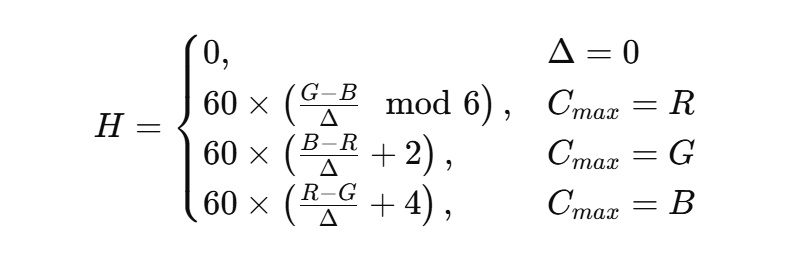
Hue 计算:
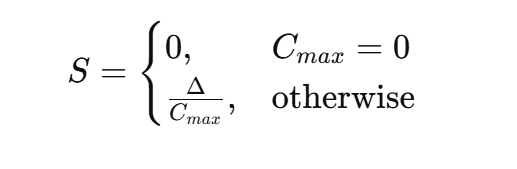
Saturation:
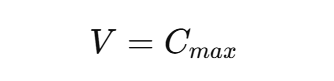
Value:
HSL(或 HLS)模型原理
HSL 模型(Hue, Saturation, Lightness)与 HSV 类似,同样将颜色表示为"色调+饱和度+亮度"的形式,但亮度(L)定义不同,导致视觉表现差异更符合人眼习惯。
HSL 的颜色空间可视为双锥体(上下对称),底部为黑,顶部为白,中间横截面表示饱和颜色。
- Hue(色调):与 HSV 相同;
- Saturation(饱和度):反映颜色纯度;
- Lightness(亮度):反映颜色的明暗程度,0 为黑,1 为白,0.5 为标准亮度。
HSL 与 RGB 的转换公式
同样定义:
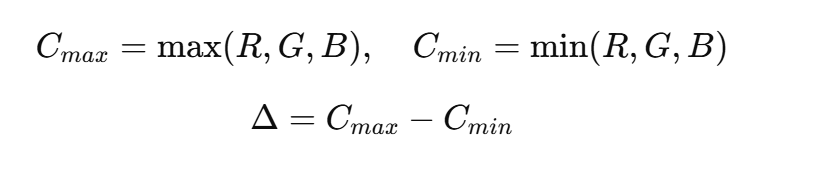
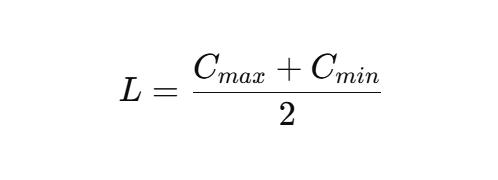
Lightness:
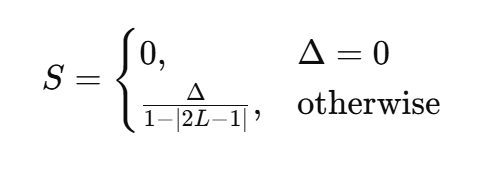
Saturation:
Hue: 与 HSV 的 Hue 计算相同。
可见,HSL 的亮度是平均值,而 HSV 的亮度是最大通道值。这一差异使得:
- HSV 更适合描述"光照强度";
- HSL 更接近人眼对"明暗"的感知。
HSV 与 HSL 的区别对比
| 项目 | HSV | HSL |
|---|---|---|
| 英文全称 | Hue-Saturation-Value | Hue-Saturation-Lightness |
| 空间形状 | 圆锥体 | 双锥体 |
| 亮度定义 | 取 RGB 最大分量 | RGB 平均值 |
| 饱和度表现 | 随亮度变化 | 在中间亮度时最饱和 |
| 黑白区间 | V=0 黑,V=1 白 | L=0 黑,L=1 白 |
| 人眼匹配度 | 一般 | 更接近人眼感知 |
| 常见用途 | 目标跟踪、颜色分割 | 图像增强、色彩校正 |
| OpenCV 支持 | cv::COLOR_BGR2HSV | cv::COLOR_BGR2HLS |
应用对比分析
颜色分割
- HSV 模型中,通过固定 Hue 范围即可分离目标色;
- HSL 模型中,受亮度影响较小,适合在光照变化大的环境中分割。
目标跟踪
在基于颜色直方图的目标跟踪(如 CamShift、MeanShift)中,HSV 通常优于 RGB。因为在 HSV 空间下,V 通道的变化不影响色调分布。
图像增强与滤波
在图像增强中,通过调节 HSL 的 Lightness 通道可以精确控制亮度变化,而不改变色调。
肤色检测
HSL 模型对光照敏感度低于 HSV,因此在肤色检测中使用 HSL(或 YCrCb)空间更鲁棒。
cv::COLOR_BGR2HSV 与 cv::COLOR_BGR2HLS
BGR → HSV 转换
python
import cv2
import numpy as np
# 读取图像
img_bgr = cv2.imread('test.jpeg')
if img_bgr is None:
raise FileNotFoundError("未找到 test.jpeg,请确保路径正确")
# 转换为 HSV
img_hsv = cv2.cvtColor(img_bgr, cv2.COLOR_BGR2HSV)
# 拆分通道
h, s, v = cv2.split(img_hsv)
# 显示结果
cv2.imshow('Original (BGR)', img_bgr)
cv2.imshow('Hue Channel', h)
cv2.imshow('Saturation Channel', s)
cv2.imshow('Value Channel', v)
# 保存结果
cv2.imwrite('output_hsv.jpg', img_hsv)
cv2.imwrite('hue.jpg', h)
cv2.imwrite('saturation.jpg', s)
cv2.imwrite('value.jpg', v)
cv2.waitKey(0)
cv2.destroyAllWindows()BGR → HLS 转换
python
import cv2
import numpy as np
# 读取图像
img_bgr = cv2.imread('test.jpg')
if img_bgr is None:
raise FileNotFoundError("未找到 test.jpg,请确保路径正确")
# 转换为 HLS
img_hls = cv2.cvtColor(img_bgr, cv2.COLOR_BGR2HLS)
# 拆分通道
h, l, s = cv2.split(img_hls)
# 显示结果
cv2.imshow('Original (BGR)', img_bgr)
cv2.imshow('Hue Channel', h)
cv2.imshow('Lightness Channel', l)
cv2.imshow('Saturation Channel', s)
# 保存结果
cv2.imwrite('output_hls.jpg', img_hls)
cv2.imwrite('hls_hue.jpg', h)
cv2.imwrite('lightness.jpg', l)
cv2.imwrite('hls_saturation.jpg', s)
cv2.waitKey(0)
cv2.destroyAllWindows()总结
HSV 与 HSL 都是基于人眼感知设计的颜色空间,其核心思想是将颜色分离为"色调 + 饱和度 + 亮度/明度"三个维度。
两者的主要区别在于亮度定义方式:
- HSV 的 Value 反映光照强度,适合分割与跟踪;
- HSL 的 Lightness 反映视觉明暗感,适合颜色校正与图像增强。
在 OpenCV 中:
cv::COLOR_BGR2HSV与cv::COLOR_BGR2HLS分别实现两种转换;- Hue 范围缩放为 0,180;
- 选择何种空间取决于应用目标:
→ 若注重颜色识别与跟踪,用 HSV;
→ 若注重亮度调节与视觉一致性,用 HSL。