图像滤波是计算机视觉和图像处理中的基础技术,用于去除噪声、增强图像特征或提取特定信息。本文将通过一个完整的Python程序,详细介绍多种常用的图像滤波算法,并展示它们的实际效果。
程序概述
我们的程序使用OpenCV和NumPy库实现了多种图像滤波算法,包括:
- 均值滤波
- 高斯滤波
- 中值滤波
- 双边滤波
- 方框滤波
- 锐化滤波
- 自定义滤波
程序结构清晰,分为以下几个主要部分:
- 图像创建:生成用于演示的示例图像
- 噪声添加:模拟真实场景中的图像噪声
- 滤波算法:实现各种滤波方法
- 结果展示:保存并总结各种滤波效果
核心功能详解
1. 示例图像创建
python
def create_sample_image():
# 创建一个300x300的BGR图像
img = np.zeros((300, 300, 3), dtype=np.uint8)
# 绘制不同的几何图形和文字
# ...
return img这个函数创建了一个包含矩形、圆形、三角形和文字的示例图像,用于后续的滤波演示。

2. 噪声模拟
python
def add_noise(img, noise_type="gaussian", mean=0, std=25, salt_pepper_ratio=0.02):
# 添加高斯噪声或椒盐噪声
# ...
return noisy_img程序实现了两种常见噪声:
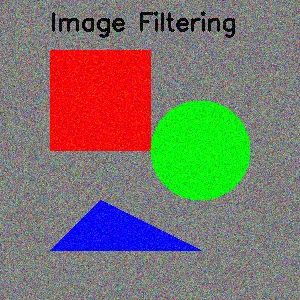
- 高斯噪声 :通过正态分布生成的随机噪声,模拟传感器噪声
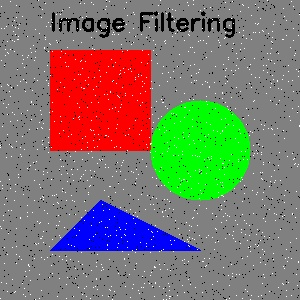
- 椒盐噪声 :随机出现的黑白像素点,模拟图像传输中的脉冲噪声
3. 滤波算法实现
均值滤波
python
def mean_filter(img, kernel_size=3):
filtered_img = cv2.blur(img, (kernel_size, kernel_size))
return filtered_img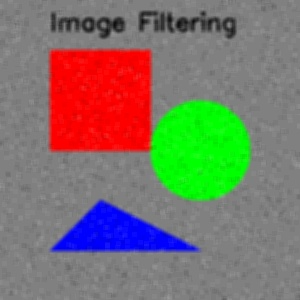
均值滤波是最简单的线性滤波方法,通过计算邻域像素的平均值来替换中心像素。它能有效去除高斯噪声,但会导致图像模糊,丢失细节。
高斯滤波
python
def gaussian_filter(img, kernel_size=3, sigma=0):
filtered_img = cv2.GaussianBlur(img, (kernel_size, kernel_size), sigma)
return filtered_img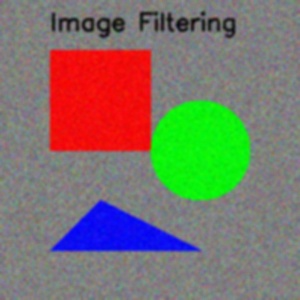
高斯滤波使用高斯函数生成的权重核进行卷积,对中心像素附近的像素赋予更高权重。它在去除高斯噪声的同时,能较好地保留图像细节。
中值滤波
python
def median_filter(img, kernel_size=3):
filtered_img = cv2.medianBlur(img, kernel_size)
return filtered_img
中值滤波是一种非线性滤波方法,用邻域像素的中值替换中心像素。它对椒盐噪声有极好的去除效果,同时能较好地保留图像边缘。
双边滤波
python
def bilateral_filter(img, d=9, sigma_color=75, sigma_space=75):
filtered_img = cv2.bilateralFilter(img, d, sigma_color, sigma_space)
return filtered_img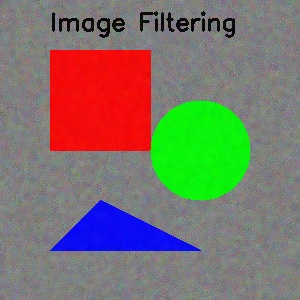
双边滤波是一种边缘保留滤波方法,同时考虑空间距离和像素值差异。它能有效去除噪声,同时保持图像边缘清晰,是一种高质量的滤波方法。
锐化滤波
python
def sharpen_filter(img):
# 锐化核
kernel = np.array([[-1, -1, -1],
[-1, 9, -1],
[-1, -1, -1]])
sharpened_img = cv2.filter2D(img, -1, kernel)
return sharpened_img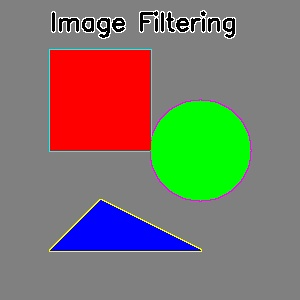
锐化滤波通过增强图像的高频分量来提高图像清晰度,使边缘和细节更加突出。
滤波效果对比
程序运行后会生成多个滤波结果文件,并在控制台输出效果总结:
powershell
滤波效果总结:
- 高斯噪声:高斯滤波 > 双边滤波 > 均值滤波
- 椒盐噪声:中值滤波 > 双边滤波 > 高斯滤波
- 边缘保留:双边滤波 > 其他滤波方法
- 锐化效果:自定义锐化核 > 其他滤波方法运行结果分析
- 原始图像 :包含几何图形和文字的清晰图像
- 噪声图像 :添加了高斯噪声和椒盐噪声的图像,细节变得模糊
- 均值滤波 :有效去除了噪声,但图像变得模糊,边缘细节丢失
- 高斯滤波 :在去除高斯噪声方面表现出色,图像细节保留较好
- 中值滤波 :对椒盐噪声的去除效果极佳,边缘清晰
- 双边滤波 :在去除噪声的同时,能很好地保留图像边缘,是一种高质量的滤波方法
- 锐化滤波 :增强了图像的边缘和细节,使图像更加清晰
应用场景建议
- 高斯噪声 :优先选择高斯滤波或双边滤波
- 椒盐噪声 :优先选择中值滤波
- 需要保留边缘 :使用双边滤波
- 需要增强细节 :使用锐化滤波
- 快速简单处理 :使用均值滤波或方框滤波
代码优化建议
- 添加交互式界面 :可以使用OpenCV的imshow函数添加实时预览功能
- 支持命令行参数 :允许用户通过命令行指定输入图像和滤波参数
- 添加更多滤波算法 :如Laplacian滤波、Scharr滤波等
- 性能优化 :对于大型图像,可以添加多线程支持
- 结果可视化 :将所有滤波结果合并到一张图像中,便于对比
完整代码
python
import cv2
import numpy as np
import os
def create_sample_image():
"""
创建一个示例图像用于滤波演示
Returns:
BGR格式的示例图像
"""
# 创建一个300x300的BGR图像
img = np.zeros((300, 300, 3), dtype=np.uint8)
# 绘制不同的几何图形
# 背景设置为灰色
img.fill(128)
# 绘制一个红色矩形
cv2.rectangle(img, (50, 50), (150, 150), (0, 0, 255), -1)
# 绘制一个绿色圆形
cv2.circle(img, (200, 150), 50, (0, 255, 0), -1)
# 绘制一个蓝色三角形
pts = np.array([[100, 200], [200, 250], [50, 250]], np.int32)
cv2.fillPoly(img, [pts], (255, 0, 0))
# 添加文字
cv2.putText(img, "Image Filtering", (50, 30),
cv2.FONT_HERSHEY_SIMPLEX, 0.8, (0, 0, 0), 2)
return img
def add_noise(img, noise_type="gaussian", mean=0, std=25, salt_pepper_ratio=0.02):
"""
为图像添加噪声
Args:
img: 输入图像
noise_type: 噪声类型,可选值:gaussian(高斯噪声)、salt_pepper(椒盐噪声)
mean: 高斯噪声的均值
std: 高斯噪声的标准差
salt_pepper_ratio: 椒盐噪声的比例
Returns:
带有噪声的图像
"""
noisy_img = img.copy()
if noise_type == "gaussian":
# 添加高斯噪声
gaussian_noise = np.random.normal(mean, std, img.shape)
noisy_img = img + gaussian_noise
noisy_img = np.clip(noisy_img, 0, 255).astype(np.uint8)
elif noise_type == "salt_pepper":
# 添加椒盐噪声
height, width, channels = img.shape
num_noise = int(height * width * salt_pepper_ratio)
# 添加盐噪声(白色像素)
for _ in range(num_noise // 2):
x = np.random.randint(0, width)
y = np.random.randint(0, height)
noisy_img[y, x] = [255, 255, 255]
# 添加椒噪声(黑色像素)
for _ in range(num_noise // 2):
x = np.random.randint(0, width)
y = np.random.randint(0, height)
noisy_img[y, x] = [0, 0, 0]
return noisy_img
def mean_filter(img, kernel_size=3):
"""
均值滤波
Args:
img: 输入图像
kernel_size: 滤波核大小
Returns:
滤波后的图像
"""
filtered_img = cv2.blur(img, (kernel_size, kernel_size))
return filtered_img
def gaussian_filter(img, kernel_size=3, sigma=0):
"""
高斯滤波
Args:
img: 输入图像
kernel_size: 滤波核大小
sigma: 高斯标准差,0表示自动计算
Returns:
滤波后的图像
"""
filtered_img = cv2.GaussianBlur(img, (kernel_size, kernel_size), sigma)
return filtered_img
def median_filter(img, kernel_size=3):
"""
中值滤波
Args:
img: 输入图像
kernel_size: 滤波核大小
Returns:
滤波后的图像
"""
filtered_img = cv2.medianBlur(img, kernel_size)
return filtered_img
def bilateral_filter(img, d=9, sigma_color=75, sigma_space=75):
"""
双边滤波
Args:
img: 输入图像
d: 滤波直径
sigma_color: 颜色空间标准差
sigma_space: 坐标空间标准差
Returns:
滤波后的图像
"""
filtered_img = cv2.bilateralFilter(img, d, sigma_color, sigma_space)
return filtered_img
def box_filter(img, kernel_size=3, normalize=True):
"""
方框滤波
Args:
img: 输入图像
kernel_size: 滤波核大小
normalize: 是否归一化,True表示均值滤波,False表示求和滤波
Returns:
滤波后的图像
"""
# 计算归一化参数
normalize_flag = 1 if normalize else 0
filtered_img = cv2.boxFilter(img, -1, (kernel_size, kernel_size), normalize=normalize_flag)
return filtered_img
def sharpen_filter(img):
"""
锐化滤波
Args:
img: 输入图像
Returns:
锐化后的图像
"""
# 锐化核
kernel = np.array([[-1, -1, -1],
[-1, 9, -1],
[-1, -1, -1]])
# 应用锐化核
sharpened_img = cv2.filter2D(img, -1, kernel)
return sharpened_img
def custom_filter(img, kernel):
"""
自定义滤波
Args:
img: 输入图像
kernel: 自定义滤波核
Returns:
滤波后的图像
"""
filtered_img = cv2.filter2D(img, -1, kernel)
return filtered_img
def main():
"""
主函数,演示各种图像滤波技术
"""
print("=== 图像滤波演示 ===")
# 创建示例图像
print("1. 创建示例图像...")
original_img = create_sample_image()
cv2.imwrite('sample_filtering.jpg', original_img)
print(" 原始图像已保存到 sample_filtering.jpg")
# 添加噪声
print("2. 为图像添加噪声...")
# 添加高斯噪声
gaussian_noisy = add_noise(original_img, noise_type="gaussian", std=30)
cv2.imwrite('gaussian_noisy.jpg', gaussian_noisy)
print(" 高斯噪声图像已保存到 gaussian_noisy.jpg")
# 添加椒盐噪声
salt_pepper_noisy = add_noise(original_img, noise_type="salt_pepper", salt_pepper_ratio=0.03)
cv2.imwrite('salt_pepper_noisy.jpg', salt_pepper_noisy)
print(" 椒盐噪声图像已保存到 salt_pepper_noisy.jpg")
# 3. 均值滤波
print("3. 均值滤波演示...")
mean_filtered_gaussian = mean_filter(gaussian_noisy, kernel_size=5)
mean_filtered_saltpepper = mean_filter(salt_pepper_noisy, kernel_size=5)
cv2.imwrite('mean_filtered_gaussian.jpg', mean_filtered_gaussian)
cv2.imwrite('mean_filtered_saltpepper.jpg', mean_filtered_saltpepper)
print(" 均值滤波结果已保存")
# 4. 高斯滤波
print("4. 高斯滤波演示...")
gaussian_filtered = gaussian_filter(gaussian_noisy, kernel_size=5, sigma=1.5)
cv2.imwrite('gaussian_filtered.jpg', gaussian_filtered)
print(" 高斯滤波结果已保存到 gaussian_filtered.jpg")
# 5. 中值滤波
print("5. 中值滤波演示...")
median_filtered = median_filter(salt_pepper_noisy, kernel_size=5)
cv2.imwrite('median_filtered.jpg', median_filtered)
print(" 中值滤波结果已保存到 median_filtered.jpg")
# 6. 双边滤波
print("6. 双边滤波演示...")
bilateral_filtered = bilateral_filter(gaussian_noisy, d=9, sigma_color=75, sigma_space=75)
cv2.imwrite('bilateral_filtered.jpg', bilateral_filtered)
print(" 双边滤波结果已保存到 bilateral_filtered.jpg")
# 7. 方框滤波
print("7. 方框滤波演示...")
# 归一化方框滤波(相当于均值滤波)
box_filtered_normalized = box_filter(gaussian_noisy, kernel_size=5, normalize=True)
# 非归一化方框滤波
box_filtered_nonnormalized = box_filter(original_img, kernel_size=3, normalize=False)
cv2.imwrite('box_filtered_normalized.jpg', box_filtered_normalized)
cv2.imwrite('box_filtered_nonnormalized.jpg', box_filtered_nonnormalized)
print(" 方框滤波结果已保存")
# 8. 锐化滤波
print("8. 锐化滤波演示...")
sharpened = sharpen_filter(original_img)
cv2.imwrite('sharpened_image.jpg', sharpened)
print(" 锐化滤波结果已保存到 sharpened_image.jpg")
# 9. 自定义滤波
print("9. 自定义滤波演示...")
# 自定义边缘检测核(Sobel水平边缘)
sobel_x_kernel = np.array([[-1, 0, 1],
[-2, 0, 2],
[-1, 0, 1]])
custom_filtered = custom_filter(original_img, sobel_x_kernel)
cv2.imwrite('custom_filtered.jpg', custom_filtered)
print(" 自定义滤波结果已保存到 custom_filtered.jpg")
print("=== 图像滤波演示结束 ===")
print("生成的文件列表:")
print("1. sample_filtering.jpg - 原始图像")
print("2. gaussian_noisy.jpg - 高斯噪声图像")
print("3. salt_pepper_noisy.jpg - 椒盐噪声图像")
print("4. mean_filtered_*.jpg - 均值滤波结果")
print("5. gaussian_filtered.jpg - 高斯滤波结果")
print("6. median_filtered.jpg - 中值滤波结果")
print("7. bilateral_filtered.jpg - 双边滤波结果")
print("8. box_filtered_*.jpg - 方框滤波结果")
print("9. sharpened_image.jpg - 锐化滤波结果")
print("10. custom_filtered.jpg - 自定义滤波结果")
print("\n滤波效果总结:")
print("- 高斯噪声:高斯滤波 > 双边滤波 > 均值滤波")
print("- 椒盐噪声:中值滤波 > 双边滤波 > 高斯滤波")
print("- 边缘保留:双边滤波 > 其他滤波方法")
print("- 锐化效果:自定义锐化核 > 其他滤波方法")
if __name__ == "__main__":
main()总结
图像滤波是图像处理中的基础技术,不同的滤波算法有不同的适用场景。本文介绍的程序实现了多种常用的滤波算法,并通过实际演示展示了它们的效果。通过理解这些算法的原理和特点,我们可以根据实际需求选择合适的滤波方法,提高图像处理的效果和质量。
这个程序不仅是一个实用的图像滤波工具,也是学习计算机视觉和图像处理的好例子。通过研究和修改这个程序,我们可以深入理解各种滤波算法的工作原理,为更复杂的图像处理任务打下基础。