各位,最近我做的项目里,要用到多个激光测距的模块。这些激光测距的模块是用串口输出的,所以,我想用一个可以一个USB口转8个串口的板子,正好淘宝上有,我就买了。买来之后,装驱动,却碰到点问题,装不上。问淘宝的客服,客服也搞不定。后来,我摸索了一下,搞定了,把这个过程记录一下吧。
- CH348 / CH9344 驱动下载
这个1个USB转8个串口的板子,是使用沁恒的CH348的芯片,沁恒提供了驱动程序。
下载链接如下:
http://www.wch.cn/downloads/USBMSER_exe.html
https://www.wch.cn/downloads/CH9344SER_LINUX_ZIP.html
- 驱动的安装
在windows系统上,是很容易安装的,按照提示,直接安装就行。安装完成后,就可以看到8个串口了。
在树莓派5的安装要复杂一点,下面讲讲树莓派5上的安装。
2.1 树莓派5上安装碰到的问题
按照使用说明,将驱动拷到树莓派之后,输入make命令。结果是:

没有 xxx/build这个目录。
2.2 问题解决
既然有这个问题,那么我只好到处试了很多方法,都不能解决。后来,发现:
要安装一个当前版本的驱动的头。
使用命令
sudo apt install linux-heads-$(uname -r)
这样呢,会安装当前版本的驱动。
然后,要在:/lib/modules/6.8.0-1040-raspi/ 目录下面做一个符合链接。使用命令
sudo ln -s /usr/src/linux-headers-6.8.0-1040-raspi/ ./build
这时,在驱动目录的源文件目录下编译就成功了。如下

进行永久安装
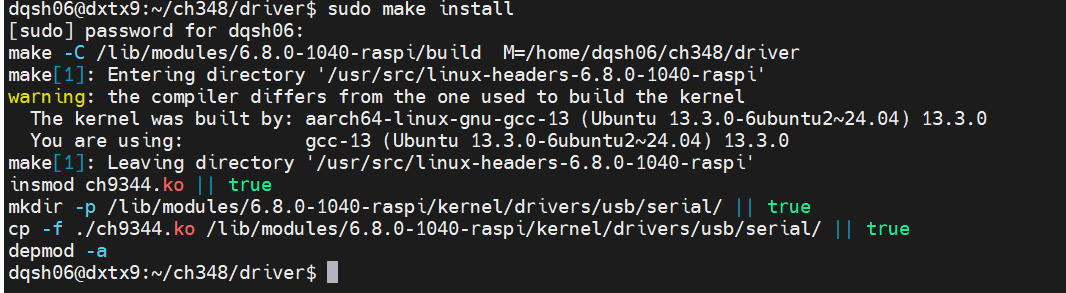
- 结果检验
按照成功后,将板子用USB线接上树莓派5,可以看到

8个串口已经出来了。成功了。
好了,大功告成,亲个嘴儿。