
二维定位中 GDOP(几何精度因子)与 CRLB(克拉美罗下界)计算的 MATLAB 程序,适用于单目标、四锚点的定位场景。
程序主要功能包括:基于给定的四锚点配置和目标真实位置,通过网格扫描法计算二维空间中各点的 GDOP 分布,并以等高线图形式可视化展示,直观呈现不同位置的定位几何精度特性。
针对目标实际位置,计算其理论定位精度下限(CRLB),包括 X 轴和 Y 轴方向的标准差以及对应的 GDOP 值
文章目录
程序介绍
该代码用于二维定位中 G D O P GDOP GDOP(几何精度因子)与 C R L B CRLB CRLB(克拉美罗下界)计算的 MATLAB 程序,适用于单目标、四锚点的定位场景。
程序主要功能包括 :
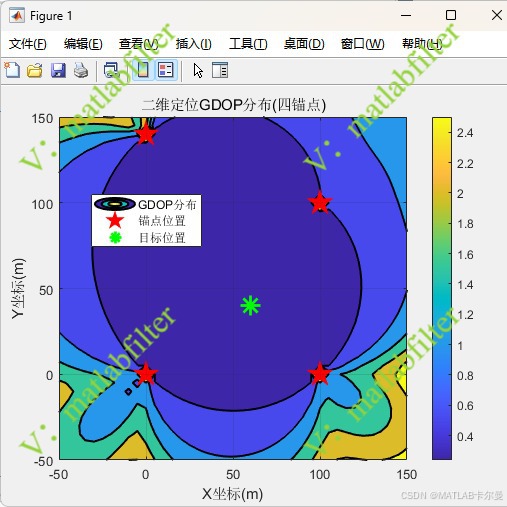
基于给定的四锚点配置和目标真实位置,通过网格扫描法计算二维空间中各点的 G D O P GDOP GDOP分布,并以等高线图形式可视化展示,直观呈现不同位置的定位几何精度特性。
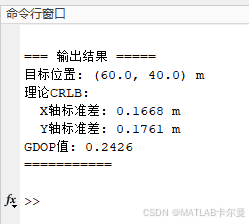
针对目标真实位置,计算其理论定位精度下限( C R L B CRLB CRLB),包括 X 轴和 Y 轴方向的标准差以及对应的 G D O P GDOP GDOP值,并以文字形式输出分析结果。
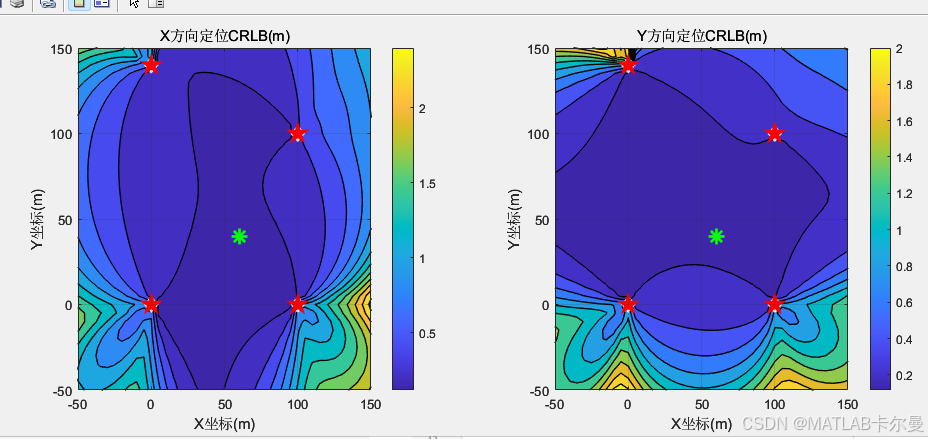
进一步,计算并可视化展示整个空间中 X 轴和 Y 轴方向的 C R L B CRLB CRLB分布,帮助分析不同方向上的定位精度差异。
运行结果
GDOP图像:
CRLB图像:
对特定位置的数据输出:
参数设置(参数可修改)
MATLAB源代码
部分代码如下:
matlab
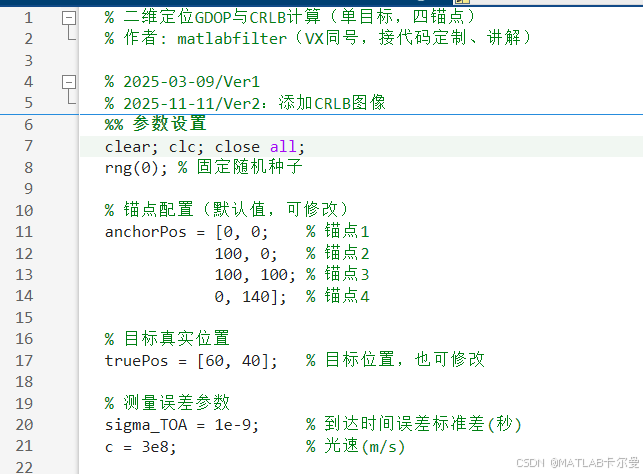
% 二维定位GDOP与CRLB计算(单目标,四锚点)
% 作者: matlabfilter
% 2025-03-09/Ver1
% 2025-11-11/Ver2:添加CRLB图像
%% 参数设置
clear; clc; close all;
rng(0); % 固定随机种子
% 锚点配置(默认值,可修改)
anchorPos = [0, 0; % 锚点1
100, 0; % 锚点2
100, 100; % 锚点3
0, 140]; % 锚点4
% 目标真实位置
truePos = [60, 40]; % 目标位置,也可修改
% 测量误差参数
sigma_TOA = 1e-9; % 到达时间误差标准差(秒)
c = 3e8; % 光速(m/s)
%% GDOP计算(网格扫描法)
xRange = -50:5:150; % X轴扫描范围
yRange = -50:5:150; % Y轴扫描范围
[X,Y] = meshgrid(xRange,yRange);代码获取:https://download.csdn.net/download/callmeup/92286953
或:
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者