摘要:随着无人机技术的迅速发展,三维路径规划和避障问题成为了无人机飞行任务中亟待解决的关键问题之一。传统的路径规划方法往往难以处理复杂的三维环境中的动态障碍物和不规则地形。本文提出了一种基于多目标粒子群优化(PSO)的无人机三维路径规划与避障方法,通过优化路径的最短距离与路径平滑度两个目标,实现了高效且安全的路径规划。
作者:Bob(自研改进)
环境配置
开发工具:Matlab R2020b、R2025b
操作系统:Windows 11
硬件配置

表1 惠普(HP)暗影精灵10台式整机配置
该系统硬件配置如上,如果您的电脑配置低于下述规格,运行速度可能会与本系统的存在差异,请注意。
项目概述
随着无人机技术的广泛应用,三维路径规划和避障问题成为了无人机自主飞行中的重要研究课题。传统的路径规划算法通常优化单一目标(如最短路径或最小能量消耗),而忽略了多重约束,尤其是三维复杂地形中的避障问题。为此,本文提出了一种基于多目标粒子群优化(PSO)的三维路径规划与避障方法,通过同时优化路径的最短距离和路径平滑度,解决了无人机在复杂地形中的飞行任务。
在算法设计上,首先通过粒子群优化算法对路径进行优化,粒子的位置代表路径中的关键点。引入双目标函数-路径长度和路径平滑度,确保路径既最短又平滑。同时,结合地形数据设计了碰撞检测约束,确保路径不会与障碍物相交。为提升搜索效率,采用自适应惯性权重策略,增强了全局和局部搜索的平衡。
实验结果表明,所提算法在复杂环境中生成的避障路径具有更好的平滑性、稳定性和计算效率,能够适应动态障碍物的变化,表现出较强的鲁棒性和适应性。
研究表明,基于多目标粒子群优化的路径规划方法能有效克服传统方法的局限,具有广泛的应用前景,尤其在无人机自主飞行、智能交通和应急救援等领域。
系统设计
本系统的设计重点在于利用粒子群优化算法的全局搜索能力,通过多目标优化在保证路径安全的同时,最小化飞行路径的总距离和提高路径平滑度,进而为无人机提供一条高效、平稳的飞行轨迹。
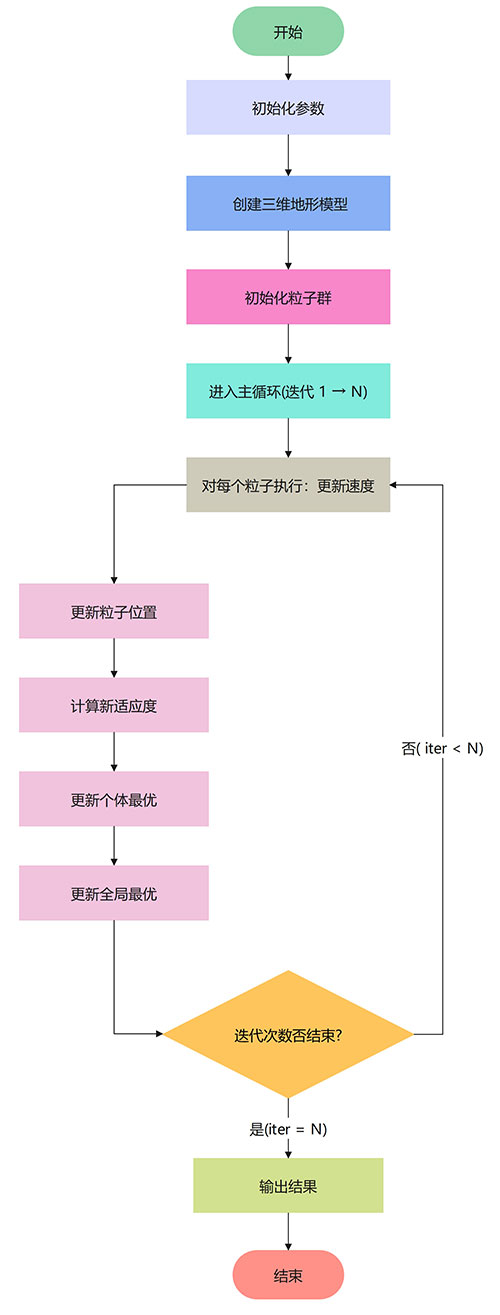
图1 系统整体流程图
运行展示
运行PSO.m
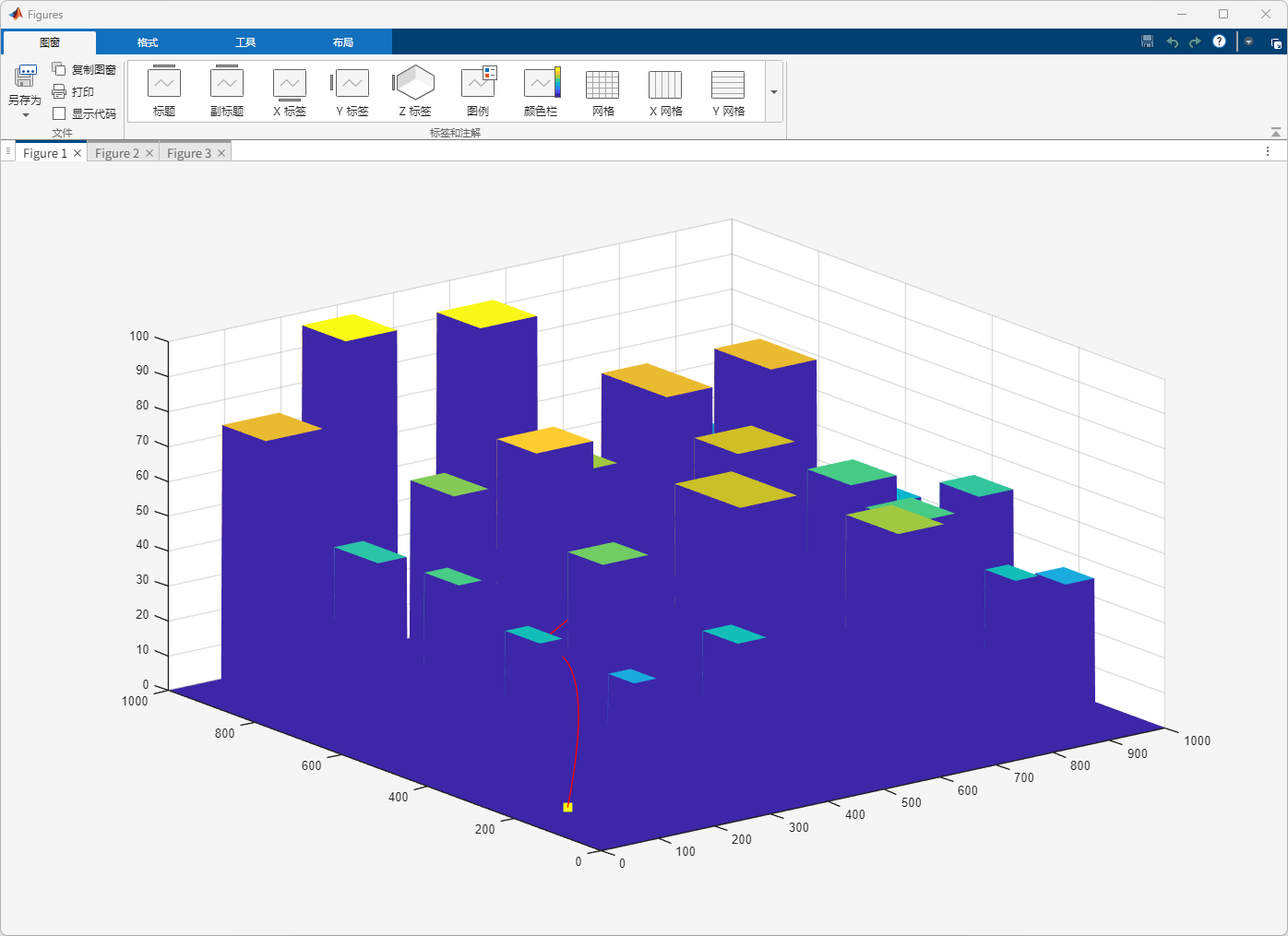
图2 三维路径规划结果与地形障碍物可视化

图3 最优适应度随迭代次数变化曲线(路径长度优化)

图4 最优适应度随迭代次数变化曲线(路径平滑度优化)