【电机控制】基于STM32F103C8T6的二轮平衡车设计------LQR线性二次线控制器(算法篇)
### 文章目录
- [@TOC(文章目录)](#文章目录 @TOC 前言 一、实验目的 二、实验步骤一:MATLAB仿真验证 1.系统状态方程 a.理论 b.代码 c.分析 2.性能指标 a.理论 b.代码 c.分析 3.Riccati代数方程——求K a.理论 b.代码 c.分析 4.反馈增益矩阵K——求u a.理论 b.代码 c.分析 四、实验结论 五、参考资料 总结)
- [前言](#文章目录 @TOC 前言 一、实验目的 二、实验步骤一:MATLAB仿真验证 1.系统状态方程 a.理论 b.代码 c.分析 2.性能指标 a.理论 b.代码 c.分析 3.Riccati代数方程——求K a.理论 b.代码 c.分析 4.反馈增益矩阵K——求u a.理论 b.代码 c.分析 四、实验结论 五、参考资料 总结)
- [一、实验目的](#文章目录 @TOC 前言 一、实验目的 二、实验步骤一:MATLAB仿真验证 1.系统状态方程 a.理论 b.代码 c.分析 2.性能指标 a.理论 b.代码 c.分析 3.Riccati代数方程——求K a.理论 b.代码 c.分析 4.反馈增益矩阵K——求u a.理论 b.代码 c.分析 四、实验结论 五、参考资料 总结)
- [二、实验步骤一:MATLAB仿真验证](#文章目录 @TOC 前言 一、实验目的 二、实验步骤一:MATLAB仿真验证 1.系统状态方程 a.理论 b.代码 c.分析 2.性能指标 a.理论 b.代码 c.分析 3.Riccati代数方程——求K a.理论 b.代码 c.分析 4.反馈增益矩阵K——求u a.理论 b.代码 c.分析 四、实验结论 五、参考资料 总结)
- [1.系统状态方程](#文章目录 @TOC 前言 一、实验目的 二、实验步骤一:MATLAB仿真验证 1.系统状态方程 a.理论 b.代码 c.分析 2.性能指标 a.理论 b.代码 c.分析 3.Riccati代数方程——求K a.理论 b.代码 c.分析 4.反馈增益矩阵K——求u a.理论 b.代码 c.分析 四、实验结论 五、参考资料 总结)
- [a.理论](#文章目录 @TOC 前言 一、实验目的 二、实验步骤一:MATLAB仿真验证 1.系统状态方程 a.理论 b.代码 c.分析 2.性能指标 a.理论 b.代码 c.分析 3.Riccati代数方程——求K a.理论 b.代码 c.分析 4.反馈增益矩阵K——求u a.理论 b.代码 c.分析 四、实验结论 五、参考资料 总结)
- [b.代码](#文章目录 @TOC 前言 一、实验目的 二、实验步骤一:MATLAB仿真验证 1.系统状态方程 a.理论 b.代码 c.分析 2.性能指标 a.理论 b.代码 c.分析 3.Riccati代数方程——求K a.理论 b.代码 c.分析 4.反馈增益矩阵K——求u a.理论 b.代码 c.分析 四、实验结论 五、参考资料 总结)
- [c.分析](#文章目录 @TOC 前言 一、实验目的 二、实验步骤一:MATLAB仿真验证 1.系统状态方程 a.理论 b.代码 c.分析 2.性能指标 a.理论 b.代码 c.分析 3.Riccati代数方程——求K a.理论 b.代码 c.分析 4.反馈增益矩阵K——求u a.理论 b.代码 c.分析 四、实验结论 五、参考资料 总结)
- [2.性能指标](#文章目录 @TOC 前言 一、实验目的 二、实验步骤一:MATLAB仿真验证 1.系统状态方程 a.理论 b.代码 c.分析 2.性能指标 a.理论 b.代码 c.分析 3.Riccati代数方程——求K a.理论 b.代码 c.分析 4.反馈增益矩阵K——求u a.理论 b.代码 c.分析 四、实验结论 五、参考资料 总结)
- [a.理论](#文章目录 @TOC 前言 一、实验目的 二、实验步骤一:MATLAB仿真验证 1.系统状态方程 a.理论 b.代码 c.分析 2.性能指标 a.理论 b.代码 c.分析 3.Riccati代数方程——求K a.理论 b.代码 c.分析 4.反馈增益矩阵K——求u a.理论 b.代码 c.分析 四、实验结论 五、参考资料 总结)
- [b.代码](#文章目录 @TOC 前言 一、实验目的 二、实验步骤一:MATLAB仿真验证 1.系统状态方程 a.理论 b.代码 c.分析 2.性能指标 a.理论 b.代码 c.分析 3.Riccati代数方程——求K a.理论 b.代码 c.分析 4.反馈增益矩阵K——求u a.理论 b.代码 c.分析 四、实验结论 五、参考资料 总结)
- [c.分析](#文章目录 @TOC 前言 一、实验目的 二、实验步骤一:MATLAB仿真验证 1.系统状态方程 a.理论 b.代码 c.分析 2.性能指标 a.理论 b.代码 c.分析 3.Riccati代数方程——求K a.理论 b.代码 c.分析 4.反馈增益矩阵K——求u a.理论 b.代码 c.分析 四、实验结论 五、参考资料 总结)
- [3.Riccati代数方程------求K](#文章目录 @TOC 前言 一、实验目的 二、实验步骤一:MATLAB仿真验证 1.系统状态方程 a.理论 b.代码 c.分析 2.性能指标 a.理论 b.代码 c.分析 3.Riccati代数方程——求K a.理论 b.代码 c.分析 4.反馈增益矩阵K——求u a.理论 b.代码 c.分析 四、实验结论 五、参考资料 总结)
- [a.理论](#文章目录 @TOC 前言 一、实验目的 二、实验步骤一:MATLAB仿真验证 1.系统状态方程 a.理论 b.代码 c.分析 2.性能指标 a.理论 b.代码 c.分析 3.Riccati代数方程——求K a.理论 b.代码 c.分析 4.反馈增益矩阵K——求u a.理论 b.代码 c.分析 四、实验结论 五、参考资料 总结)
- [b.代码](#文章目录 @TOC 前言 一、实验目的 二、实验步骤一:MATLAB仿真验证 1.系统状态方程 a.理论 b.代码 c.分析 2.性能指标 a.理论 b.代码 c.分析 3.Riccati代数方程——求K a.理论 b.代码 c.分析 4.反馈增益矩阵K——求u a.理论 b.代码 c.分析 四、实验结论 五、参考资料 总结)
- [c.分析](#文章目录 @TOC 前言 一、实验目的 二、实验步骤一:MATLAB仿真验证 1.系统状态方程 a.理论 b.代码 c.分析 2.性能指标 a.理论 b.代码 c.分析 3.Riccati代数方程——求K a.理论 b.代码 c.分析 4.反馈增益矩阵K——求u a.理论 b.代码 c.分析 四、实验结论 五、参考资料 总结)
- [4.反馈增益矩阵K------求u](#文章目录 @TOC 前言 一、实验目的 二、实验步骤一:MATLAB仿真验证 1.系统状态方程 a.理论 b.代码 c.分析 2.性能指标 a.理论 b.代码 c.分析 3.Riccati代数方程——求K a.理论 b.代码 c.分析 4.反馈增益矩阵K——求u a.理论 b.代码 c.分析 四、实验结论 五、参考资料 总结)
- [a.理论](#文章目录 @TOC 前言 一、实验目的 二、实验步骤一:MATLAB仿真验证 1.系统状态方程 a.理论 b.代码 c.分析 2.性能指标 a.理论 b.代码 c.分析 3.Riccati代数方程——求K a.理论 b.代码 c.分析 4.反馈增益矩阵K——求u a.理论 b.代码 c.分析 四、实验结论 五、参考资料 总结)
- [b.代码](#文章目录 @TOC 前言 一、实验目的 二、实验步骤一:MATLAB仿真验证 1.系统状态方程 a.理论 b.代码 c.分析 2.性能指标 a.理论 b.代码 c.分析 3.Riccati代数方程——求K a.理论 b.代码 c.分析 4.反馈增益矩阵K——求u a.理论 b.代码 c.分析 四、实验结论 五、参考资料 总结)
- [c.分析](#文章目录 @TOC 前言 一、实验目的 二、实验步骤一:MATLAB仿真验证 1.系统状态方程 a.理论 b.代码 c.分析 2.性能指标 a.理论 b.代码 c.分析 3.Riccati代数方程——求K a.理论 b.代码 c.分析 4.反馈增益矩阵K——求u a.理论 b.代码 c.分析 四、实验结论 五、参考资料 总结)
- [四、实验结论](#文章目录 @TOC 前言 一、实验目的 二、实验步骤一:MATLAB仿真验证 1.系统状态方程 a.理论 b.代码 c.分析 2.性能指标 a.理论 b.代码 c.分析 3.Riccati代数方程——求K a.理论 b.代码 c.分析 4.反馈增益矩阵K——求u a.理论 b.代码 c.分析 四、实验结论 五、参考资料 总结)
- [五、参考资料](#文章目录 @TOC 前言 一、实验目的 二、实验步骤一:MATLAB仿真验证 1.系统状态方程 a.理论 b.代码 c.分析 2.性能指标 a.理论 b.代码 c.分析 3.Riccati代数方程——求K a.理论 b.代码 c.分析 4.反馈增益矩阵K——求u a.理论 b.代码 c.分析 四、实验结论 五、参考资料 总结)
- [总结](#文章目录 @TOC 前言 一、实验目的 二、实验步骤一:MATLAB仿真验证 1.系统状态方程 a.理论 b.代码 c.分析 2.性能指标 a.理论 b.代码 c.分析 3.Riccati代数方程——求K a.理论 b.代码 c.分析 4.反馈增益矩阵K——求u a.理论 b.代码 c.分析 四、实验结论 五、参考资料 总结)
前言
提示:以下是本篇文章正文内容,下面案例可供参考
PID控制器和LQR控制器各有优劣,
LQR控制器更依赖物理模型的建立,也就是白盒实验 ,需要知道系统内部,再进行调参;
而PID控制器给我的感受是,黑盒实验,即不需要知道物理模型,根据输出响应,直接调参就可以了 ;
当然,有同学会反驳我,PID控制器也需要物理模型,不可否认,PID也有白盒实验的情况;
但是,大多数的工程,还是经验调参,而不是算了半天,算完再调;
可能这也是为什么大家用脚投PID一票的原因吧;
遇事不决PID大法好...
【电机控制】基于STM32F103C8T6的二轮平衡车设计
一、实验目的
在二轮平衡小车的项目中,落地LQR线性二次型算法;
二、实验步骤一:MATLAB仿真验证
与卡尔曼滤波算法验证不同的是,LQR控制器的设计最终需要反馈增益矩阵K值,在代码里,K值是给定值,不是在代码里在线计算,而是离线进行仿真计算;
因此,需要先离线,在MATLAB中进行仿真;
【电机仿真】LQR控制器------二轮平衡小车控制
再将K值代入到代码里,在线验证;
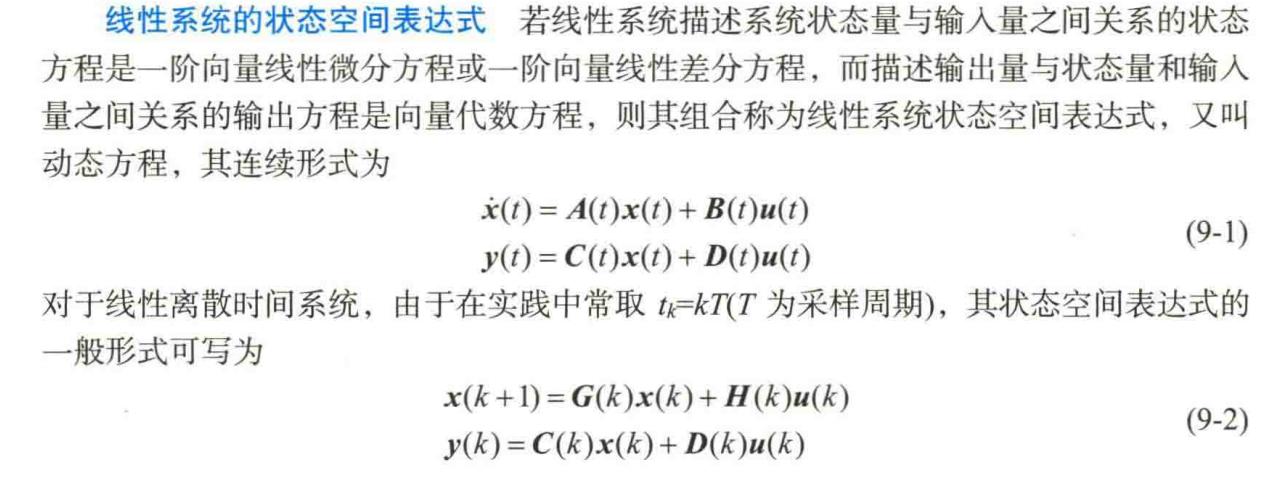
最优控制 在现代控制理论中有着及其重要的位置,其研究目标是使受控系
统的性能指标达到最优时,所需要的基本条件,及其控制的综合方法。
线性二次型(LQR)控制 ,是一种线性状态反馈控制方法,是最优控制理
论中最成熟、最系统的方法。
1.系统状态方程
a.理论
b.代码
因为是离线控制,所以推导K的代码没有在STM32中;
输入参数为举例,并不代表本项目实际使用的输入参数
在MATLAB代码中,建立系统方程的步骤如下
c
m = 0.035;
r = 0.0672/2;
i = 0.5*m*r^2;
M = 0.757-2*m;
L = 0.5*0.0903;
J_p = (1/12)*M*(0.0903^2+0.0530^2);
d = 0.1612;
J_delta = (1/12)*M*(0.0930^2+0.0530^2);
g = 9.8;
Q_eq = J_p*M+(J_p+M*L^2)*(2*m+2*i/r^2);
A_23 = -(M^2*L^2*g)/Q_eq;
A_43 = M*L*g*(M+2*m+2*i/r^2)/Q_eq;
B_21 = (J_p+M*L^2+M*L*r)/(Q_eq*r);
B_22 = B_21;
B_41 = -(M*L/r+M+2*m+2*i/r^2)/Q_eq;
B_42 = B_41;
B_61 = 1/(r*(m*d+i*d/r^2+2*J_delta/d));
B_62 = -B_61;
A = [0 1 0 0 0 0; 0 0 A_23 0 0 0; 0 0 0 1 0 0; 0 0 A_43 0 0 0; 0 0 0 0 0 1; 0 0 0 0 0 0];
B = (i/r)*[0 0; B_21 B_22; 0 0; B_41 B_42; 0 0; B_61 B_62];c.分析
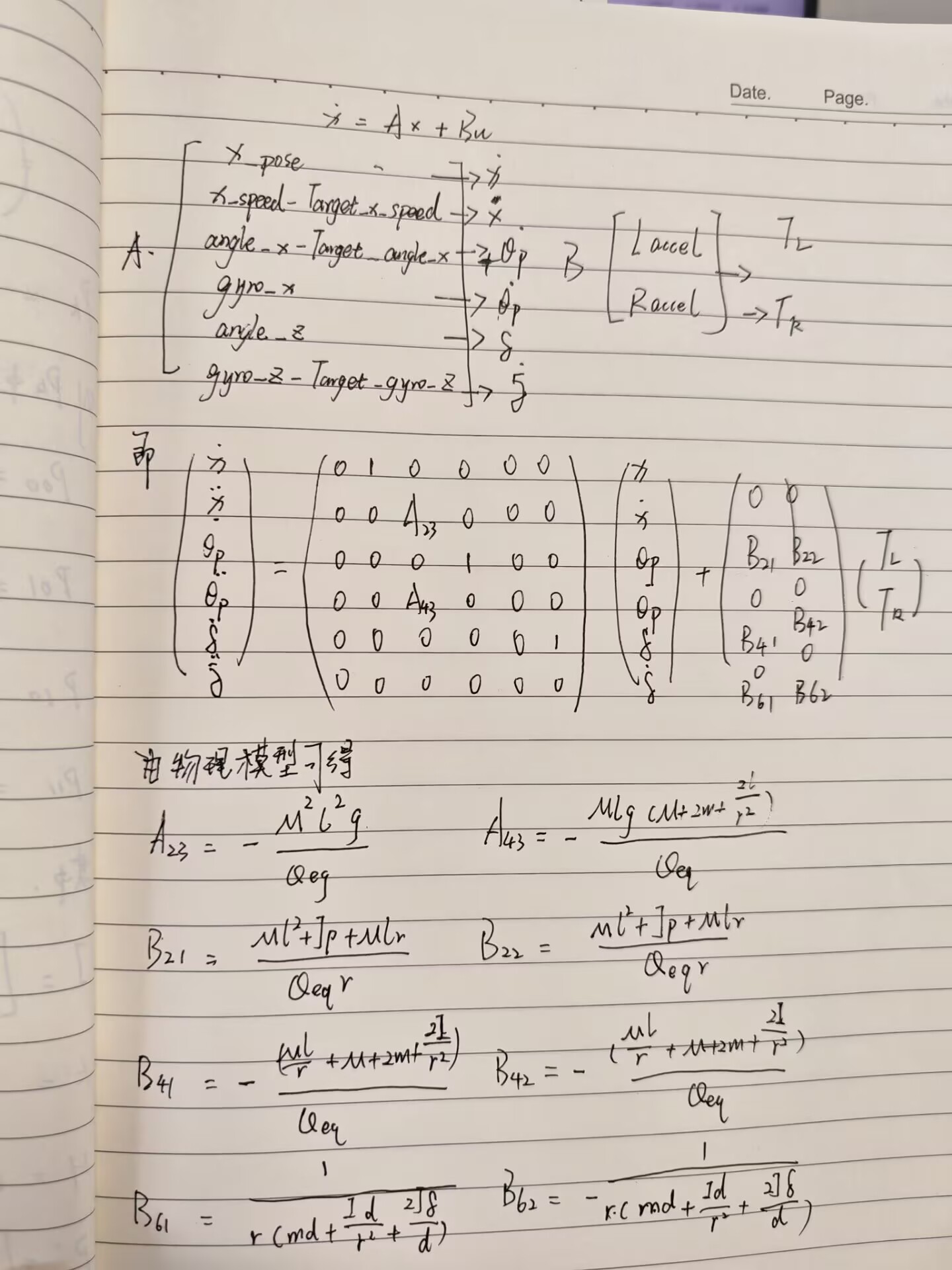
状态方程中,状态转移矩阵内A和输入矩阵B的具体推导过程如下:
【电机仿真】LQR控制器------二轮平衡小车控制
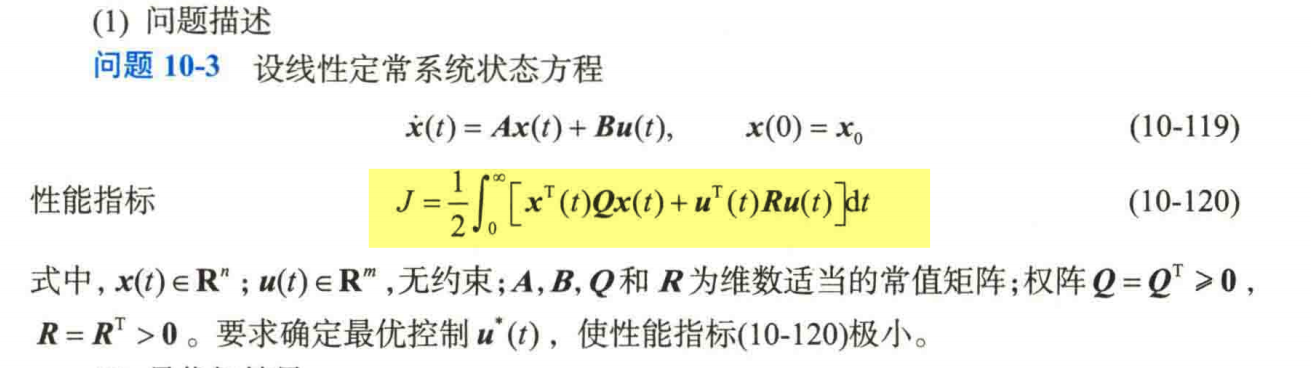
2.性能指标
a.理论
性能泛函包含两项,一是系统的积累跟踪误差,二是控制能量。显然它着重权衡和惩罚大的跟踪积累误差和大的控制能量。泛函J取得极小值的含义是:在没有过大控制能量消耗的前提下,使系统输出量 Y(t)尽量接近理想输出量 r(t),即跟踪误差最小。根据以上条件,最优控制存在且唯一。
b.代码
c
Q = [1000 0 0 0 0 0; 0 0 0 0 0 0; 0 0 0 0 0 0; 0 0 0 1000 0 0; 0 0 0 0 1000 0; 0 0 0 0 0 0];
R = [1 0; 0 1];c.分析
Q的设置体现控制优先级 :代码中Q(1,1)=1000**(位移误差)、Q(4,4)=1000 (俯仰角速度误差)、Q(5,5)=1000(转向角误差)**,说明优先保证这三个状态的精度。R的设置限制控制量:R=eye(2)表示左 / 右轮力的代价相同,避免电机输出过大(如急加速导致的不稳定)。
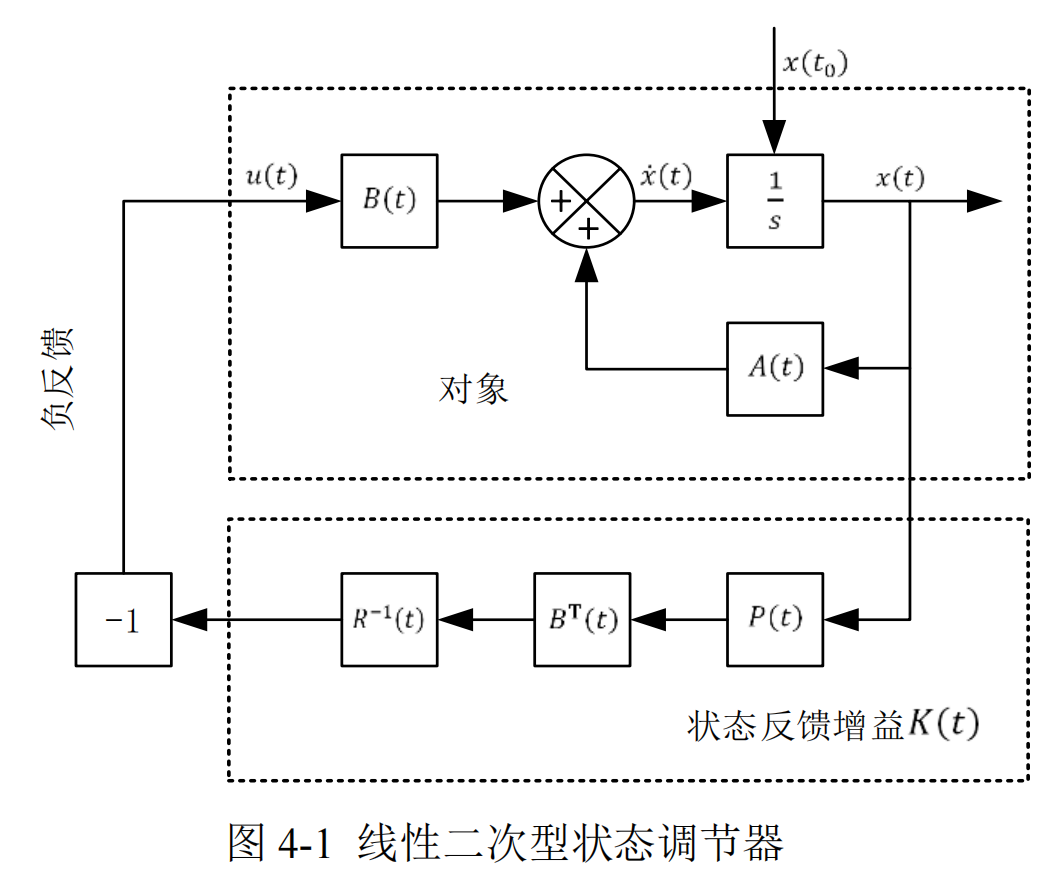
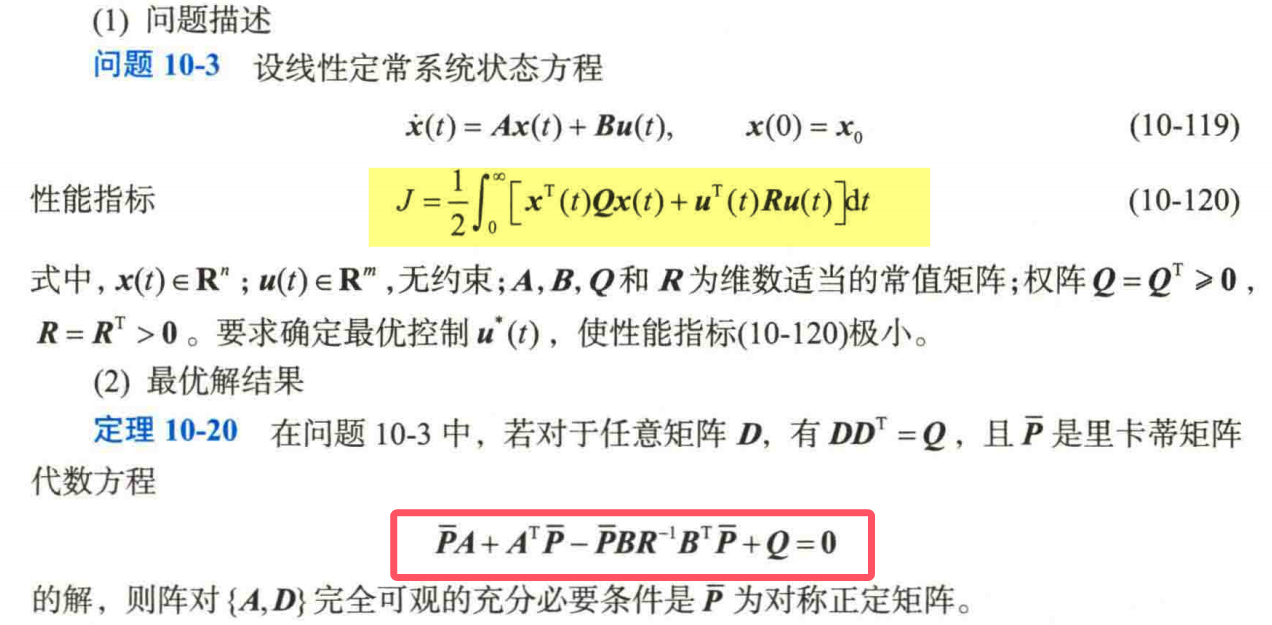
3.Riccati代数方程------求K
a.理论
若有最优解,则Riccati代数方程=0,可求解P
求解P后可求解K
b.代码
c
K = lqr(A,B,Q,R); % 调用MATLAB的lqr函数,输入A、B、Q、R,输出6×2增益矩阵K在MATLAB代码底层函数中,可以看到
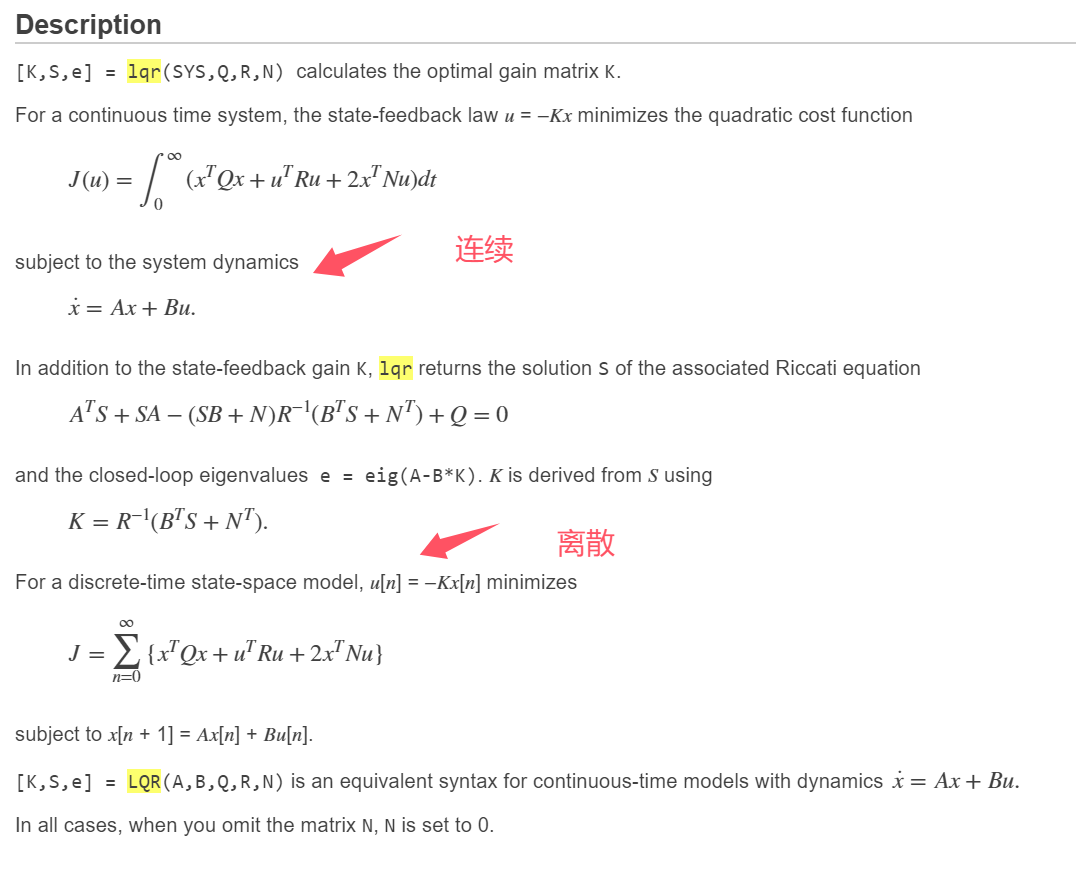
c.分析
对于连续时间系统,基于状态方程中的微分方程,性能函数为求积分,对应的Riccati代数方程为

对于离散时间系统,基于状态方程中的差分方程,性能指标是离散求和形式,底层会调用离散 Riccati 方程的求解逻辑
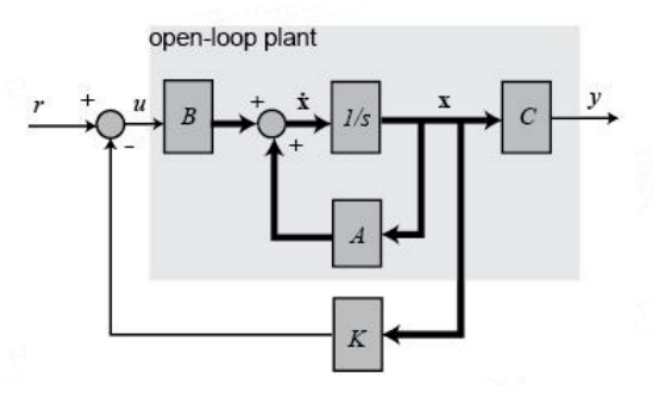
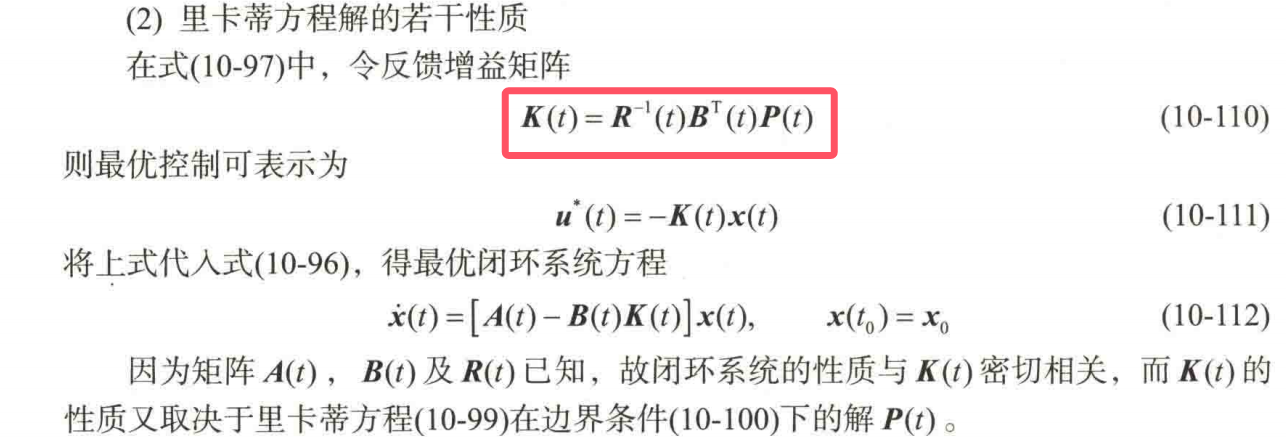
4.反馈增益矩阵K------求u
a.理论
求解K后,可求解u

b.代码
最终,终于有STM32的代码,其实只有这两行;
c
L_accel=-(K1*x_pose+K2*(x_speed-Target_x_speed)+K3*(angle_x-Target_angle_x)+K4*gyro_x+K5*angle_z+K6*(gyro_z-Target_gyro_z));
R_accel=-(K1*x_pose+K2*(x_speed-Target_x_speed)+K3*(angle_x-Target_angle_x)+K4*gyro_x-K5*angle_z-K6*(gyro_z-Target_gyro_z));c.分析
由于理论模型与实际小车存在误差(如摩擦、传感器噪声),仿真得到的K可能需要微调:
若小车平衡不稳定 (左右摇晃):
增大K3(倾角误差权重)或K4(倾角角速度权重);
若转向过冲 (转角度度过大):
减小K5或K6;若速度跟踪不准:
增大K2(速度误差权重)。
四、实验结论
验证二轮平衡小车中,联立代码,分析理论,验证LQR线性二次线控制器算法的可行性;
五、参考资料
【电机仿真】LQR控制器------二轮平衡小车控制
【最优控制】5_线性二次型调节器(LQR)详细数学推导
总结
本文仅仅简单介绍了【电机控制】基于STM32F103C8T6的二轮平衡车设计------LQR线性二次线控制器(算法篇),评论区欢迎讨论。