一 先来了解一个可能不知道的知识点
看门狗定时器导致的系统复位,并不是在看门狗一进中断时就马上触发进行复位的,恰恰相反,这个中断是一个"最后警告",是给你一个在复位前进行紧急处理的机会。
第一阶段:计数器溢出,触发中断
-
看门狗计数器从重装载值开始向下计数。
-
如果在这期间没有被"喂狗",计数器会溢出。
-
第一次溢出时 ,硬件会设置一个中断标志位 ,并产生一个看门狗中断。
-
此时,系统不会复位! CPU会暂停当前任务,跳转到看门狗中断服务程序中去执行。
第二阶段:中断后的"最后机会"窗口
-
现在系统已经进入了看门狗中断。这是一个非常关键的时期,通常只有几十或几百个看门狗时钟周期。
-
在这个中断服务程序中,你有两个选择:
-
正确喂狗 :你仍然可以检查程序出错的原因,并尝试向重装载寄存器写入特定值来"喂狗",清除计数器。如果成功,系统将不会复位,并从中断返回继续运行。
-
不喂狗或喂狗失败 :如果你在中断服务程序里没有 进行喂狗操作,或者程序已经混乱到无法正确执行喂狗指令,看门狗计数器会继续计数。
-
注:有些MCU在看门狗中断里进行喂狗是很危险的操作,通常这时硬件系统给的时间是有限制的,以下图为例:
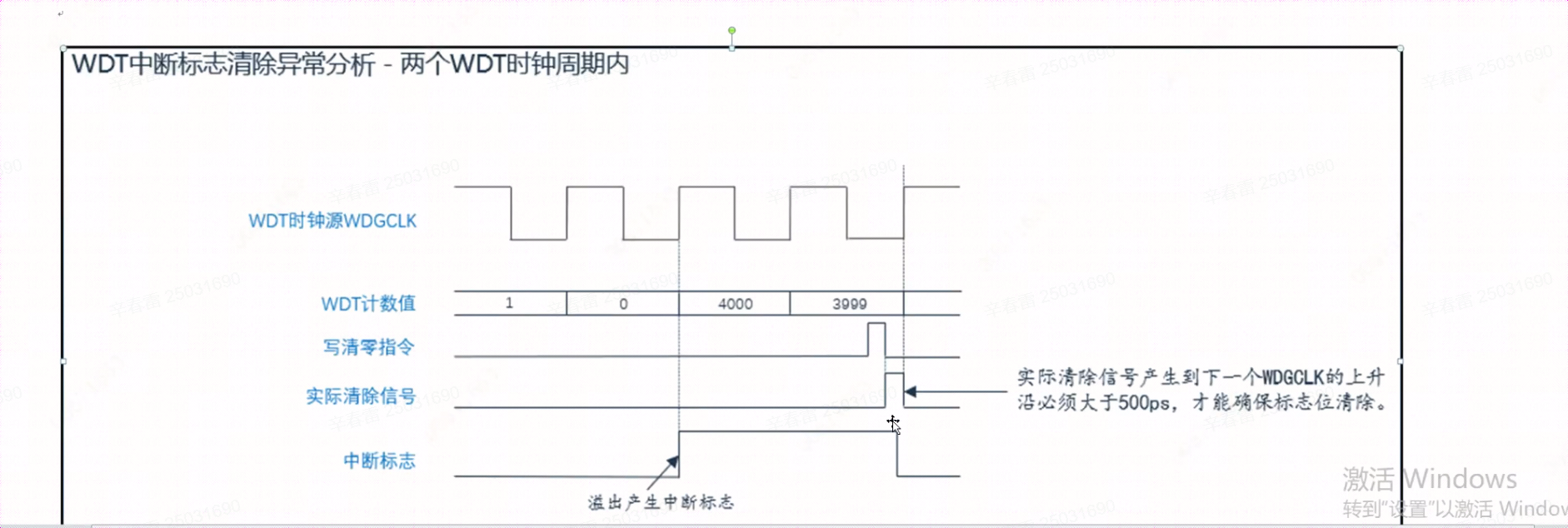
看门狗实际清除的信号到下一个看门狗时钟的上升沿必须大于500ps,清除操作才能执行成功,标志位才能被清除。
第三阶段:第二次溢出,触发复位
-
如果看门狗计数器在触发中断后,又经历了第二次溢出 ,这里的第二次溢出是指对第一次溢出没有处理,这时看门狗硬件才会产生一个系统复位信号。
-
这次复位是真正的、不可挽回的,它会将整个MCU恢复到初始状态。
二 那么在主循环中执行清除操作就不会遇到上述问题吗
如果清除操作放到主循环里面不放在看门狗中断里面就能保证这个500ps的时间足够吗,不还是会遇到靠近上升沿之前的情况吗
其实,
无论清除操作放在主循环还是看门狗中断里,都无法从原理上避免"信号靠近时钟上升沿"的情况。
这个500ps的要求是一个硬件层面的时序参数 ,它是由芯片内部的物理电路特性决定的,与软件代码写在哪个部分(主循环或中断)没有直接关系。
而且,产生"清除信号"的系统总线时钟 和看门狗自己的WDGCLK 通常是两个不同源、不同频率的时钟 。它们之间是异步的。
-
主循环或中断服务程序 的执行是由系统时钟 同步的。
-
看门狗计数器 的计数是由WDGCLK 同步的。
这两个时钟的上升沿之间的相位关系是随机的、不断变化的。因此,您软件在任何时刻发出的"清除信号",相对于WDGCLK的上升沿,其位置也是完全随机的。
这就导致了以下几种情况必然随机发生:
-
情况A(理想):清除信号在WDGCLK上升沿之前很早就稳定了(>> 500ps),稳定被采样。
-
情况B(临界):清除信号在WDGCLK上升沿之前刚刚稳定(刚好 > 500ps),勉强被采样。
-
情况C(失败):清除信号在WDGCLK上升沿之前稳定时间不足(< 500ps),采样失败。
由于时钟是异步的,您的软件代码无法控制自己发出的信号到底落在哪个时间点。因此,理论上,即使代码100%正确,也存在因建立时间不满足而导致偶尔喂狗失败的概率。
虽然不能从根本上消除问题,但软件设计会极大地影响 这种情况发生的概率 和后果。因为
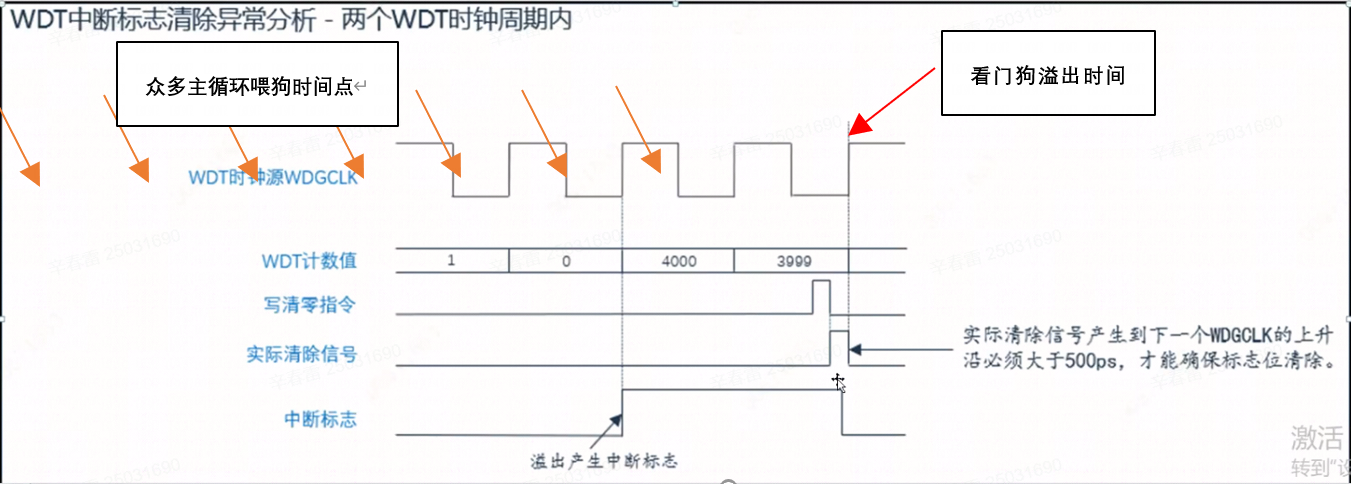
主循环周期性地、频繁地喂狗,机会多 。即使某一次因为时序问题失败,很快下一次喂狗操作可能就成功了。通过多次重复的喂狗操作,将单次失败的概率平均掉了,系统表现稳定。
见下图,失败的风险几乎稀释为0
总结一下:
这个疑问是对的,清除操作放在哪里都无法绝对避免时序临界点。但是,放在主循环里,通过增加喂狗频率,可以将单次操作失败的风险稀释到近乎为零;而放在看门狗中断里,则是将整个系统的可靠性暴露在一次高风险操作之下。 因此,芯片厂商的示例代码和最佳实践都强烈建议在主循环中喂狗,这正是在软件层面应对这种硬件时序不确定性的最有效策略。