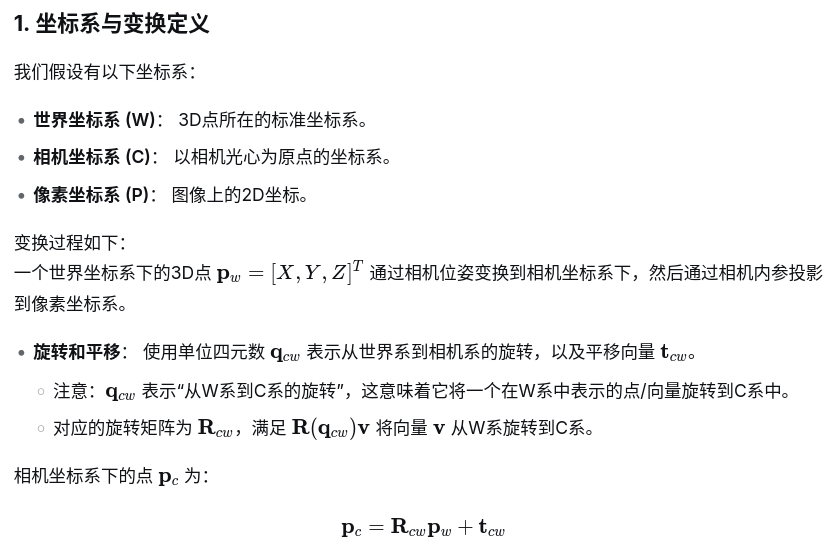
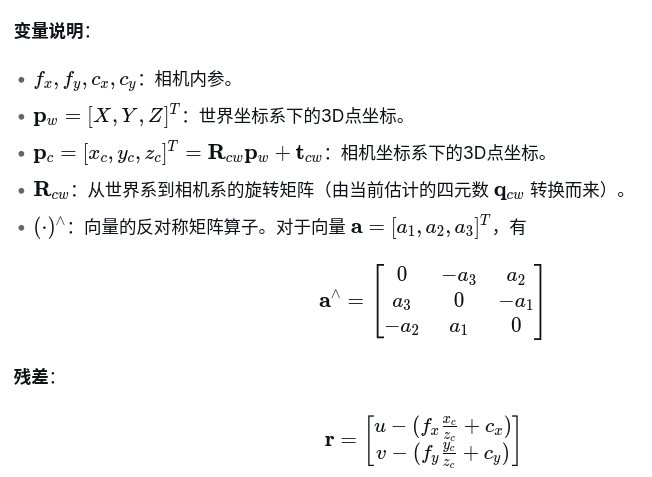
之前章节总结了轴角参数化,简单介绍了下四元数参数化,本节补充下李群-李代数表示的位姿,如何利用视觉3D到2D重投影误差的残差及雅可比
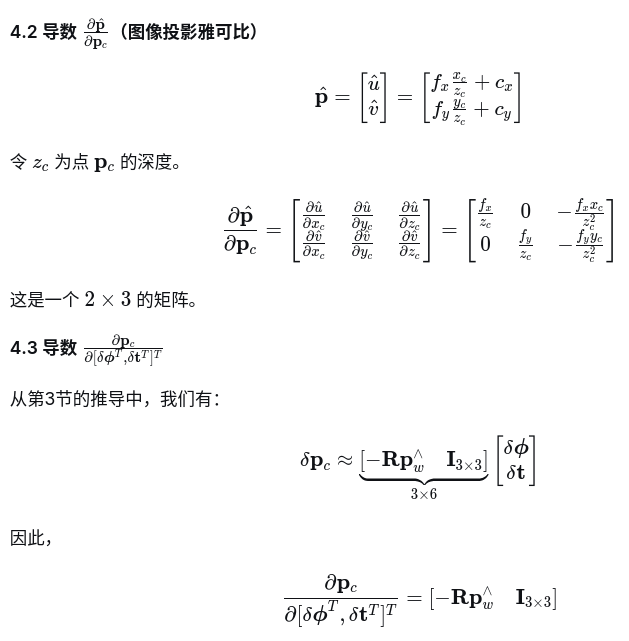
这是一个 3×6的矩阵
这是一个2×3的矩阵
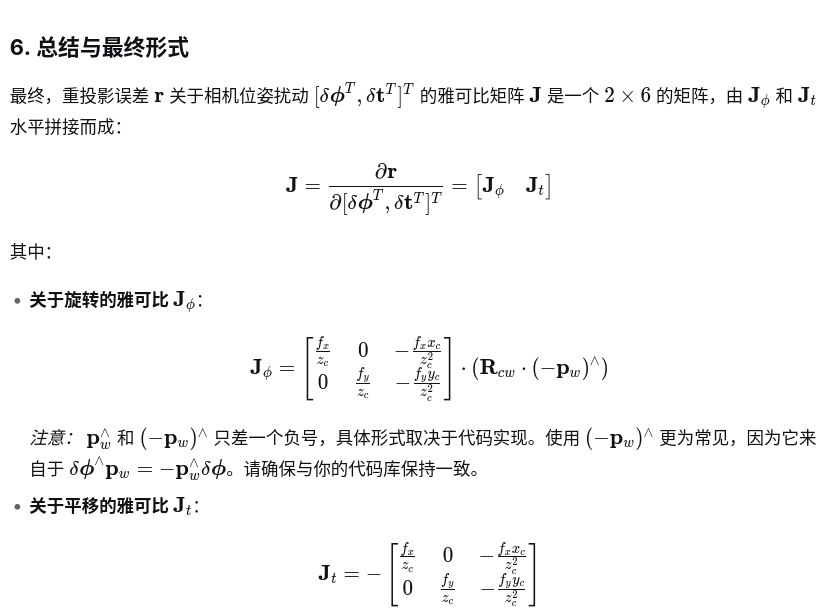
这个推导结果与视觉SLAM经典教材(如《视觉SLAM十四讲》)中的结果是一致的。在实际的优化库(如g2o, Ceres)中,正是使用这些雅可比矩阵来指导优化方向,从而高效地求解最优的相机位姿。
之前章节总结了轴角参数化,简单介绍了下四元数参数化,本节补充下李群-李代数表示的位姿,如何利用视觉3D到2D重投影误差的残差及雅可比
这是一个 3×6的矩阵
这是一个2×3的矩阵
这个推导结果与视觉SLAM经典教材(如《视觉SLAM十四讲》)中的结果是一致的。在实际的优化库(如g2o, Ceres)中,正是使用这些雅可比矩阵来指导优化方向,从而高效地求解最优的相机位姿。