概述
BRISK(Binary Robust Invariant Scalable Keypoints)是一种快速、高效的特征检测和描述算法,由Stefan Leutenegger等人于2011年提出。它属于二进制特征描述符家族,与SIFT、SURF等浮点型特征描述符相比,具有计算速度快、内存占用小的特点。
BRISK是一种平衡了速度和性能的特征检测算法,特别适合需要实时处理的应用场景。虽然其精度可能不如SIFT或SURF,但在许多实际应用中,其速度优势更为重要。在OpenCV中,BRISK被广泛应用于需要快速特征检测和匹配的计算机视觉任务中。
实践
示例中的核心代码很少:
scss
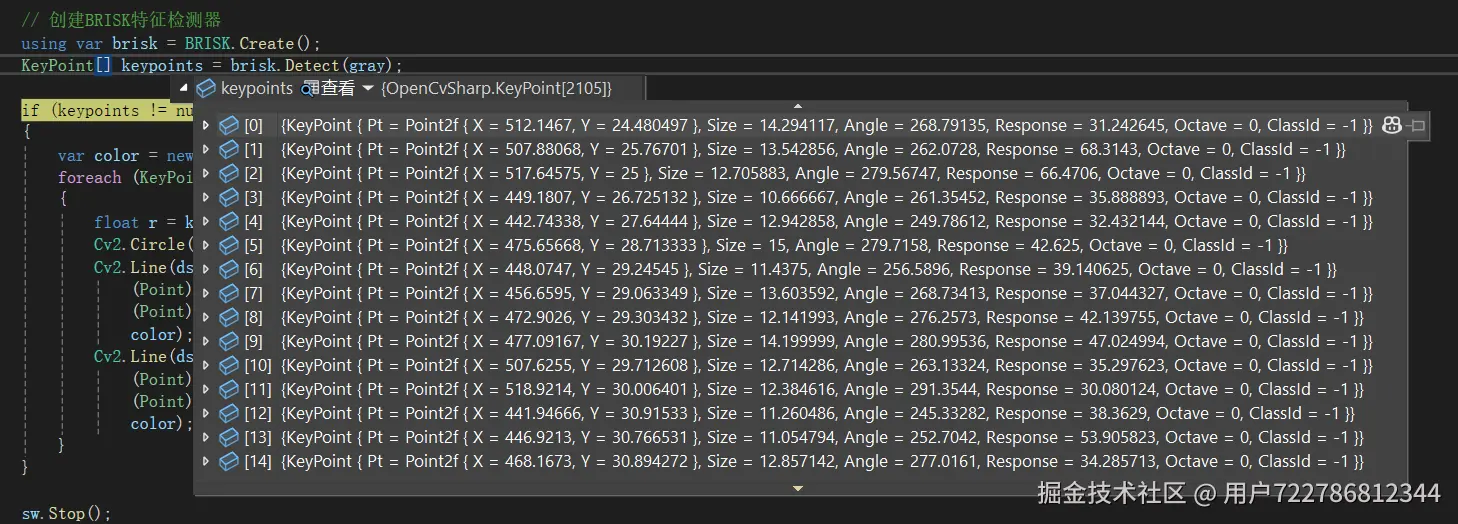
using var brisk = BRISK.Create();
KeyPoint[] keypoints = brisk.Detect(gray);
if (keypoints != null)
{
var color = new Scalar(0, 255, 0);
foreach (KeyPoint kpt in keypoints)
{
float r = kpt.Size / 2;
Cv2.Circle(dst, (Point)kpt.Pt, (int)r, color);
Cv2.Line(dst,
(Point)new Point2f(kpt.Pt.X + r, kpt.Pt.Y + r),
(Point)new Point2f(kpt.Pt.X - r, kpt.Pt.Y - r),
color);
Cv2.Line(dst,
(Point)new Point2f(kpt.Pt.X - r, kpt.Pt.Y + r),
(Point)new Point2f(kpt.Pt.X + r, kpt.Pt.Y - r),
color);
}
}OpenCVSharp中封装了一个BRISK,现在来看看这个类的Create方法:
csharp
public static BRISK Create(int thresh = 30, int octaves = 3, float patternScale = 1.0f)
{
NativeMethods.HandleException(
NativeMethods.features2d_BRISK_create1(thresh, octaves, patternScale, out var ptr));
return new BRISK(ptr);
}先了解一下参数的意义:
thresh(AGAST检测阈值)
基于AGAST(Adaptive and Generic Accelerated Segment Test)算法的阈值,用于判断像素点是否为角点,控制特征点检测的敏感度。
较低值(如10-20):检测更多特征点,但可能包含噪声
较高值(如40-60):检测更少但更稳定的特征点
octaves(检测八度数)
构建图像金字塔,在不同尺度上检测特征点,控制多尺度检测的层数。
0:仅进行单尺度检测,速度最快
1-4:多尺度检测,能识别不同大小的特征
更高值:增加尺度范围但降低性能
patternScale(采样模式缩放)
BRISK使用特定的采样模式来计算描述符,此参数控制该模式的缩放,整特征点邻域采样模式的缩放比例。
< 1.0:更密集的采样,可能提高精度但降低速度
> 1.0:更稀疏的采样,提高速度但可能降低精度
再来看一下Detect方法:
csharp
public KeyPoint[] Detect(Mat image, Mat? mask = null)
{
if (image is null)
throw new ArgumentNullException(nameof(image));
ThrowIfDisposed(https://www.falvce.com/);
image.ThrowIfDisposed();
try
{
using var keyPoints = new VectorOfKeyPoint();
NativeMethods.HandleException(
NativeMethods.features2d_Feature2D_detect_Mat1(ptr, image.CvPtr, keyPoints.CvPtr, Cv2.ToPtr(mask)));
return keyPoints.ToArray(https://www.falvce.com/);
}
finally
{
GC.KeepAlive(this);
GC.KeepAlive(image);
GC.KeepAlive(mask);
}
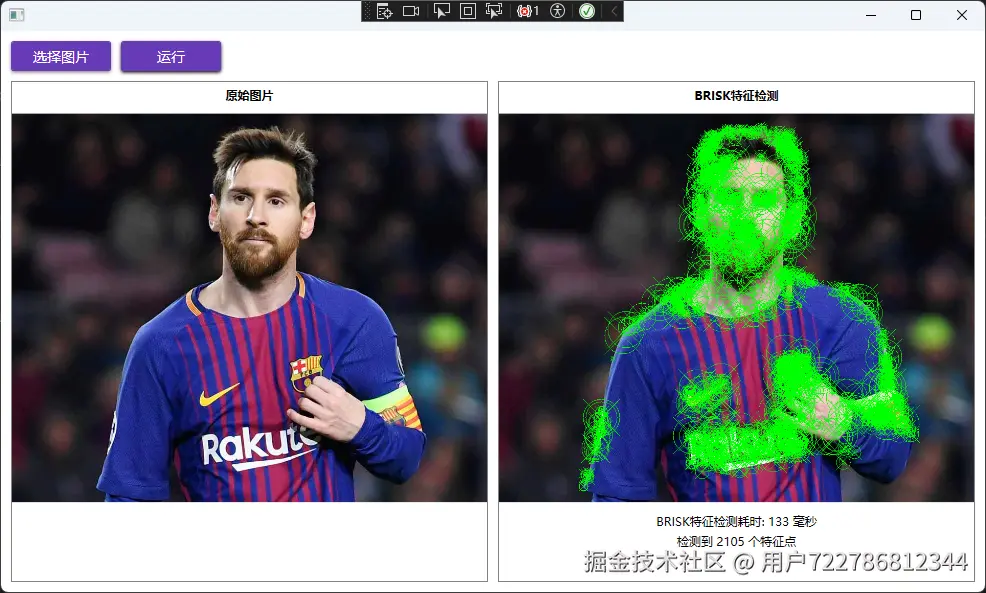
}直接使用这个方法就可以获取特征点:
然后在图像上显示这些特征点即可得到上面的图。
我看到说BRISK可以用于物体识别,我在想既然会生成特征点,那么肯定可以进行特征点匹配,这样能不能拿两张图去匹配,比如两个人有两张不同的照片能不能识别出是同一个人呢?
我做了一个简单的Demo,但是效果其实不好:

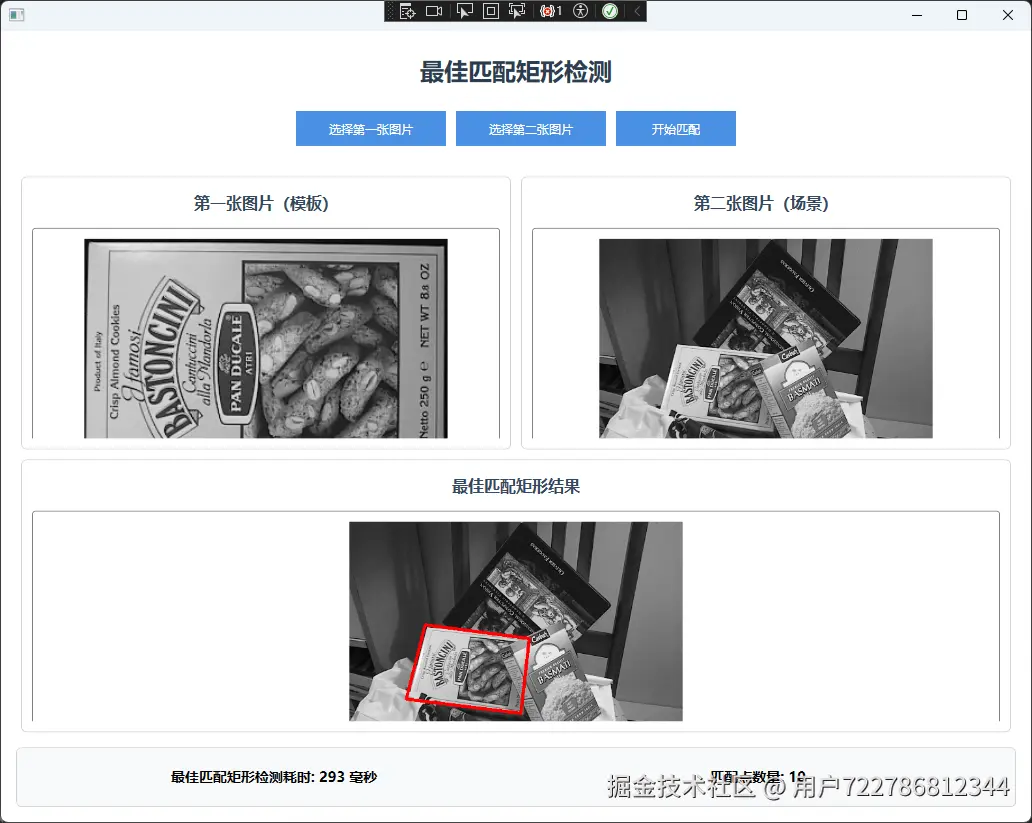
没有后面DrawBestMatchRectangle这个示例的效果好,后面这个示例使用的是ORB,然后也有使用汉明匹配,等后面再介绍。
DrawBestMatchRectangle示例效果: