
一、项目背景
国家管网集团某分公司负责西北-华北原油干线国内段运营。该段 185 km~225 km 区间地势起伏剧烈,设有一座新建 3# 增压泵站,承担 55 bar→78 bar 二次加压任务。站内采用"机器人巡检+PLC 工艺联锁"的少人值守架构

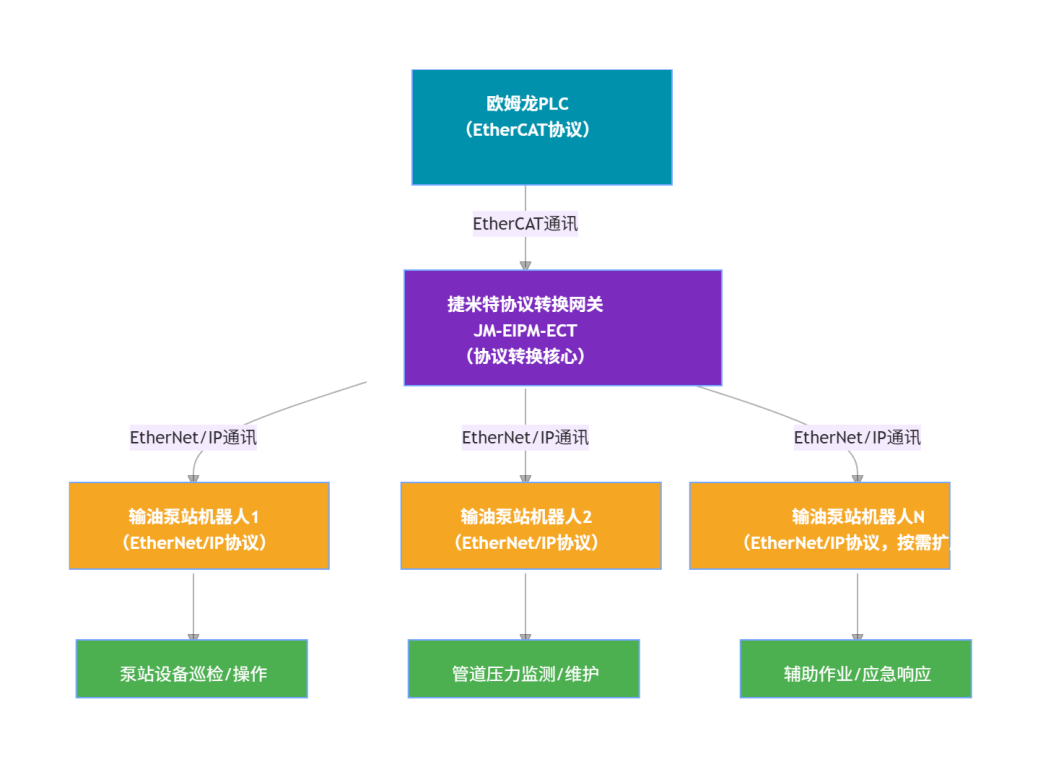
为打通 EtherNet/IP←→EtherCAT 数据壁垒,用户最终选用 捷米特 JM-EIPM-ECT 工业级协议转换网关,让机器人成为 EtherNet/IP 主站,直接读写 EtherCAT 侧 PLC 的 PDO,实现双向 20 ms 以内的闭环控制。项目 2025-03-15 启动,2025-04-28 完成热试,至今连续无故障运行 2 200 h。
二、关键设备清单
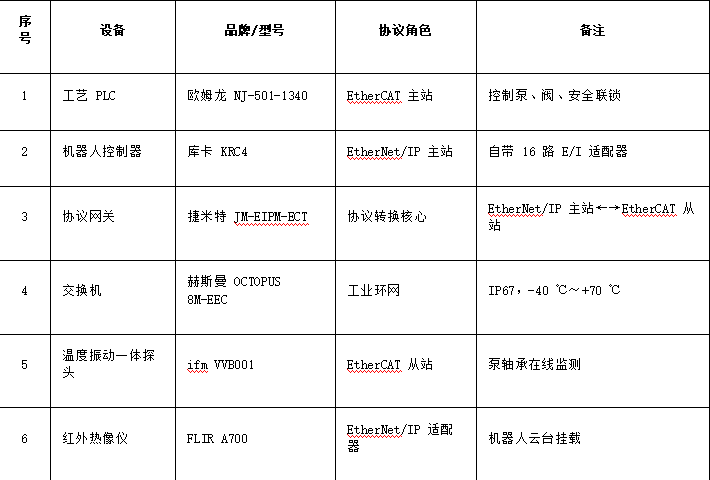
三、JM-EIPM-ECT 协议转换网关 技术亮点
-
双主站设计:EtherNet/IP 侧为主站,EtherCAT 侧为从站,与欧姆龙 PLC 构成"从站-主站"透明映射,无需修改 PLC 程序;
-
数据长度:支持 1 500 Byte IN/OUT,满足 32 轴+200 点 IO 的完整 PDO;
-
实时性:实测往返 12 ms(KRC4→网关→NJ→网关→KRC4);
-
冗余:双 24 VDC 输入,支持 1 μs 分布式时钟同步;
-
环境:-45 ℃~+85 ℃,IP20 铝壳,35 mm DIN 导轨安装,MTBF ≥ 10 万 h。
四、网络拓扑与接线
网关供电:站内 24 VDC 冗余电源,端子 1+ / 2-;
接地:与泵站等电位网 M6 铜排连接,实测接地电阻 0.8 Ω;
屏蔽:EtherCAT 采用 CAT5e 屏蔽线,屏蔽层 360°压接;
环网:KRC4→OCTOPUS→JM-EIPM-ECT→NJ,RSTP 冗余恢复时间 < 20 ms。
五、配置步骤(详细)
① EtherCAT 侧(网关作为从站)
-
在 Sysmac Studio v1.52 新建工程,导入捷米特提供的 JM-EIPM-ECT.xml ESI 文件;
-
右侧"EtherCAT"目录右键→添加从站→选择"JM-EIPM-ECT";

- 根据机器人需求,分配 PDO 映射:
· IN(PLC→网关→机器人)
-- 泵轴承温度 8×REAL
-- 泵 X/Y/Z 振动 6×REAL
-- 进口压力 1×REAL
-- 运行状态 1×UDINT
· OUT(机器人→网关→PLC)
-- 红外热点温度 1×REAL
-- 泄漏标志 1×BOOL
-- 云台水平/垂直角度 2×REAL
-
设置同步方式 DC-Sync,周期 2 ms;
-
编译下载,PLC 重启后 ECT 绿色指示灯常亮。

② EtherNet/IP 侧(网关作为主站)
-
打开 KUKA.WorkVisual 6.0,添加"EtherNet/IP Scanner";
-
导入捷米特提供的 JM-EIPM-ECT.eds 文件;
-
设置网关 IP 192.168.1.10/24,RPI 8 ms,连接类型 Point-to-Point;
-
在"Assembly Instance"中对应 PDO 长度:
· Input Assembly 101 → 48 Byte
· Output Assembly 100 → 20 Byte
- 下载至 KRC4,重启后网关 OK 灯常亮,机器人示教器 Online 显示 48 Byte 数据刷新正常。
③ 调试与验证
· 使用 Wireshark 抓包,EtherNet/IP 显示 8 ms 周期 CIP 数据帧,无丢包;
· EtherCAT 主站 侧分布式时钟抖动 < 50 ns;
· 现场做"启泵-升压-机器人巡检"联调:当泵轴承温度 > 75 ℃ 时,机器人自动切换至高温跟踪模式,30 s 内完成热像二次确认,同时 PLC 收到"PUMP_ALARM"信号触发降载,全过程 18.6 s,满足设计 < 30 s 要求。

六、运行效果
-
巡检效率:机器人由"盲巡"变为"数据驱动",单次巡检时间从 42 min 降至 25 min;
-
故障响应:轴承高温异常由原来人工 5~8 min 发现缩短至 20 s;
-
生产保障:泵站自 2025-05 投运以来,未发生一次因通讯延迟导致的误停或漏巡;
-
维护成本:节省硬接线 1 200 m、I/O 模块 18 只,直接材料费下降 7.4 万元;
-
可扩展性:后续计划把变频器(PowerFlex 755,EtherNet/IP)也接入同一网关,实现泵变频-机器人视觉的闭环节能。
七、结语
通过捷米特 JM-EIPM-ECT 工业级协议转换网关 ,3# 增压泵站成功实现了 EtherNet/IP 机器人 与 EtherCAT 欧姆龙 PLC 的跨协议实时通讯,打通了"工艺控制-智能巡检"数据流,为输油管道无人化、智能化升级提供了可复制、可推广的范例。