前几天,朋友圈被宇树科技的新品刷屏了。就是那家以会跑的足式机器人在圈内闻名的公司,在11月13日发布了他们的首款轮式人形机器人G1-D。
有点意思。一家靠"腿"吃饭的公司,现在开始做"轮子"了。
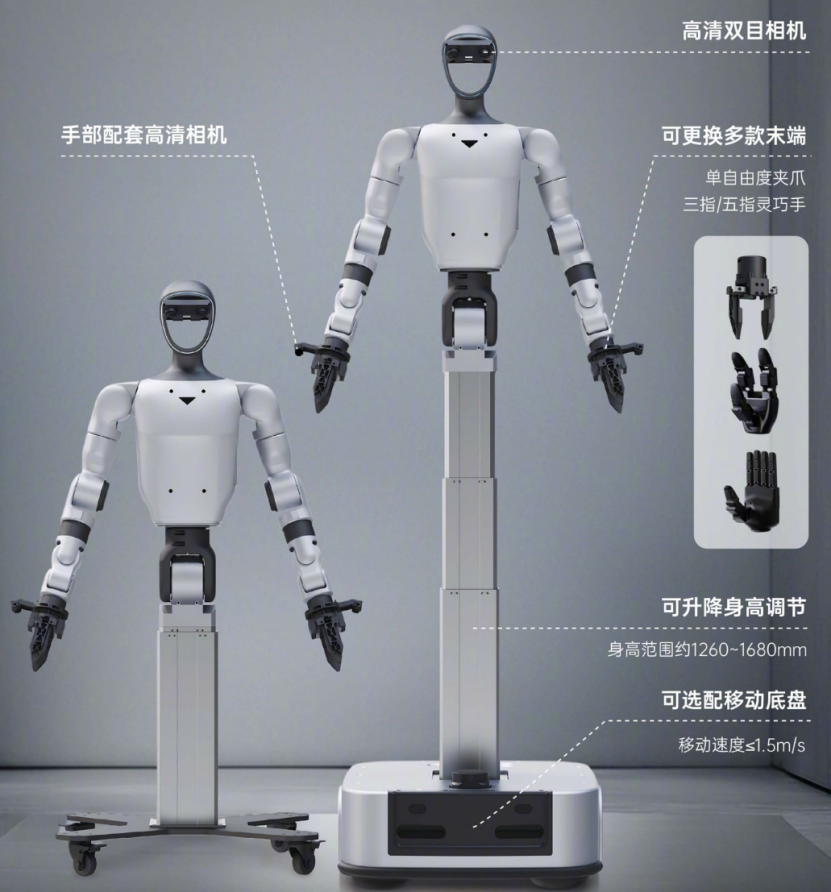
从四足到双足再到轮式,宇树这一步走得颇受关注。现场演示中,G1-D流畅地移动、抓取物品,甚至完成了一些需要精细力控的操作。看着机器人在展台上平稳滑行,我突然想到一个问题:无论机器人长什么样,用什么方式移动,它们真正需要具备的能力是什么?
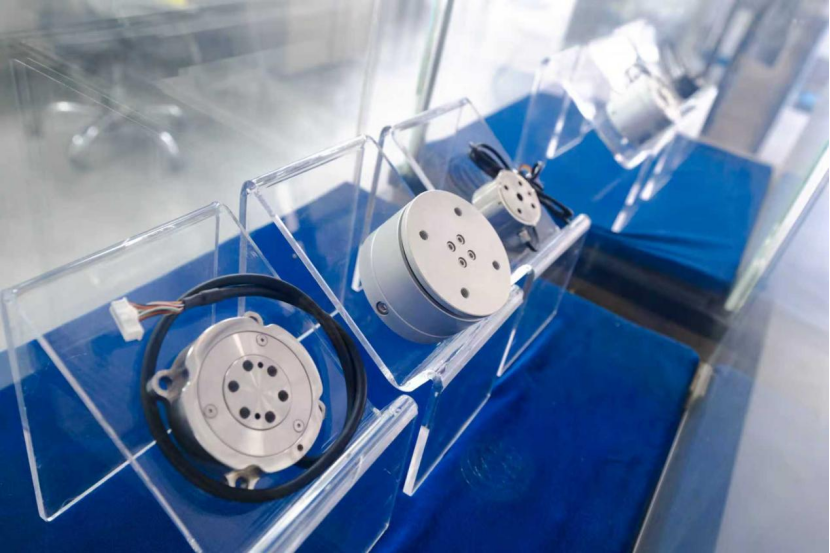
答案可能藏在那些不太起眼的零部件里------比如六维力传感器 。(ps:宇树的技术路线是不用六维力传感器的)
▍ 触觉,让机器人不只是机器
在机器人领域,我们太容易被那些炫酷的行走视频吸引,却忽略了更本质的东西------触/力觉。
想象一下,如果没有力觉,即使是最先进的机器人也像戴着手套的外科医生,能看见目标却感受不到操作的力度。六维力传感器,从某种意义上说,就是机器人的力控神经。
它能同时检测三个方向的力和三个方向的力矩,让机器人知道它用了多大力抓取杯子,是否快要捏碎这个纸杯,或者推门时需要用多大的劲。这种力控能力,是机器人从演示工具走向实用场景的关键。
▍ 从实验室到工厂,力控才是瓶颈
回到宇树这次发布的轮式机器人。选择轮式本身就是一个信号------在很多实际应用场景中,稳定、高效的移动比复杂的足式步态更重要。但无论是轮式还是足式,一旦涉及到与环境交互,力控能力就成了无法绕开的门槛。
我了解到,国内像蓝点触控这样的团队一直在深耕六维力传感器领域。"机器人可以走得不那么稳,但不能控制不好自己的力气。在真实场景中,失控的力度可能意味着损坏物品,甚至伤及人类。"
这话点出了问题核心。在实验室里,机器人可以慢慢走、小心抓。但到了工厂、仓库或家庭环境中,它们必须能够适应不确定的环境,而这离不开精确的力控。
▍ 不只是感知,更是安全的保障
六维力传感器的价值还体现在安全方面。通过实时监测交互力,机器人可以在碰撞发生前就"感觉"到异常,并及时调整。这种能力在人机共融的环境中尤为重要------当机器人和人类在同一空间工作时,安全不是选项,而是前提。
有意思的是,随着机器人应用的深入,行业开始意识到:外观形态可能因场景而异,但感知和交互能力却是共通的。这也是为什么像宇树这样的整机厂商,会在推出新品时同步提供数采训练全栈解决方案------硬件只是载体,核心是让机器人变得更"聪明"、更"敏感"。
▍ 结语
宇树从足式向轮式的拓展,反映了机器人行业正在从技术驱动转向需求驱动。轮子还是双腿?这个问题或许没那么重要。真正重要的是,无论机器人以什么形态出现,它们都需要变得更感知、更智能。
而六维力传感器这样的技术,虽然不太起眼,却可能是撬动整个行业从演示走向实用的关键支点。毕竟,在真实世界里,知道如何"拿捏"分寸的,才是真正的智能。
本文仅代表个人观点,与任何机构无关。技术讨论欢迎交流,产品细节请以官方发布为准。