目录
[1.1 简单介绍](#1.1 简单介绍)
[1.2 MIT模式的控制参数](#1.2 MIT模式的控制参数)
[1.3 使用场景](#1.3 使用场景)
[2.1 调试](#2.1 调试)
[2.2 问题定位](#2.2 问题定位)
一、MIT电机模式简单介绍
1.1 简单介绍
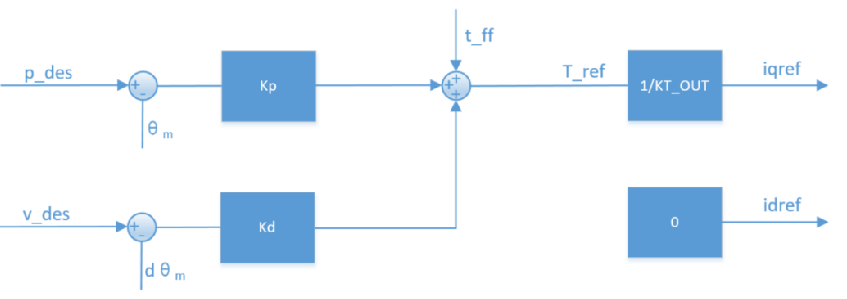
Mixed Integrated Torque为一种混合控制模式,在同一帧CAN数据里包含位置、速度、扭矩三类的闭环指令。驱动器里面把位置环、速度环、前馈扭矩相加,得到一个参考电流,然后再交给电流环完成精准扭矩输出。
1.2 MIT模式的控制参数
| 参数 | 含义 | 取值范围(常见) | 说明 |
|---|---|---|---|
| kp | 位置比例系数(刚度) | 0 ~ 500 (单位视驱动器而定) | kp = 0 时位置环失效,仅靠速度/扭矩环工作 |
| kd | 位置微分系数(阻尼) | 0 ~ 500 | kd = 0 时位置环会产生振荡,实际使用时需给一个非零值 |
| pos (q) | 期望位置(单位:计数或角度) | -12.5 ~ 12.5 rad(示例) | 位置环的目标值 |
| vel (dq) | 期望速度(单位:rpm) | -30 ~ 30 rpm(示例) | 速度环的目标值 |
| torq (tau) | 前馈扭矩(单位:Nm) | -T_MAX ~ T_MAX | 直接给定的扭矩,常用于 纯扭矩控制(kp = kd = 0) |
1.3 使用场景
| 场景 | 参数设置示例 | 说明 |
|---|---|---|
| 匀速转动 | kp = 0,kd ≠ 0,pos = 0,vel = 目标速度,torq = 0 | 只打开速度环,电机以恒定速度运行。 |
| 纯扭矩输出 | kp = 0,kd = 0,pos = 0,vel = 0,torq = 目标扭矩 | 前馈扭矩直接驱动电流环,适用于 力矩控制(如抓取、阻尼) |
| 点到点位置控制 | kp > 0,kd > 0,pos = 目标位置,vel = 0,torq = 0 | 位置环+速度环共同作用,实现平滑定位。 |
| 位置‑速度‑扭矩混合 | kp > 0,kd > 0,pos = 目标位置,vel = 目标速度,torq = 前馈扭矩 | 适用于 刚度‑阻尼‑外力补偿(如机械臂的阻抗控制)。 |
在使用位置控制时,kd不能为0,否则电机会振荡、失控;
二、调试时建议
2.1 调试
| 步骤 | 操作要点 |
|---|---|
| ① 先打开位置环 | 设定 kp > 0、kd > 0,观察位置响应曲线,确保无明显超调。 |
| ② 调整阻尼 | 增大 kd 可抑制振荡;若响应过慢,可适当降低 kp。 |
| ③ 速度环 | 在位置环基础上调节 vel(目标速度)或直接使用 kp=0、kd≠0 进行 纯速度控制。 |
| ④ 前馈扭矩 | 当负载较大时,适当加入 torque 前馈,以补偿静摩擦或外部扰动。 |
| ⑤ 监测电流 | 通过驱动器的电流反馈(CAN 0x02 帧)检查是否出现 过流 ,必要时限制 torque 上限。 |
2.2 问题定位
| 问题 | 可能原因 | 检查方式 |
|---|---|---|
| 电机不转动 | kp=0、kd=0、torque=0(所有环失效) |
确认发送的参数中至少有一个非零值。 |
| 出现振荡 | kd 设为 0 或过小 |
增大 kd,或在位置环加入适当的 kp。 |
| 转速偏差大 | 前馈扭矩未补偿负载 | 在 torque 参数中加入正向前馈,或调大 kp。 |
| CAN 报文未到达 | 报文 ID 错误或波特率不匹配 | 用示波器或上位机抓包确认 ID 为 0x00+motor_id(位置帧)和 0x01+motor_id(扭矩帧),波特率与驱动器保持一致(默认 1 Mbps)。 |
| 电机过流保护 | torque 设定过大 |
限制 torque 幅值在驱动器手册规定的 T_MAX 范围内。 |