小尺度/微型机器人中的远程通信为增强其能力提供了强大途径,可通过引入了状态监测、多智能体协作和自主操作等可能性。将常见的远程通信工具(例如天线)集成到微型机器人中,使用传统设计和制造技术具有挑战性。文中提出一种概念,将形状可重构的软体微型机器人与柔性电子器件相结合,利用其弹性力学特性实现远程通信。这种方法基于光刻工艺,可扩展并适用于各种传感应用。作为概念验证,我们展示了一款微型机器人,其将热响应磁性水凝胶、各向异性支撑结构和柔性偶极天线集成到一个连贯的三层设计中。该微型机器人能够在低温下从螺旋形态变形为高温下的平面形态。这种形状转变可以通过外部无线通信接收器远程检测,从而实现形态状态识别和环境温度传感。此外,我们证明了多个微型机器人的集体行为通过放大信号增强了识别性能。这一概念代表了智能材料与柔性电子协同工程的重要进展,展示了一种通过集成环境监测、磁导航和远程信号传递来实现微型机器人具身智能的途径。
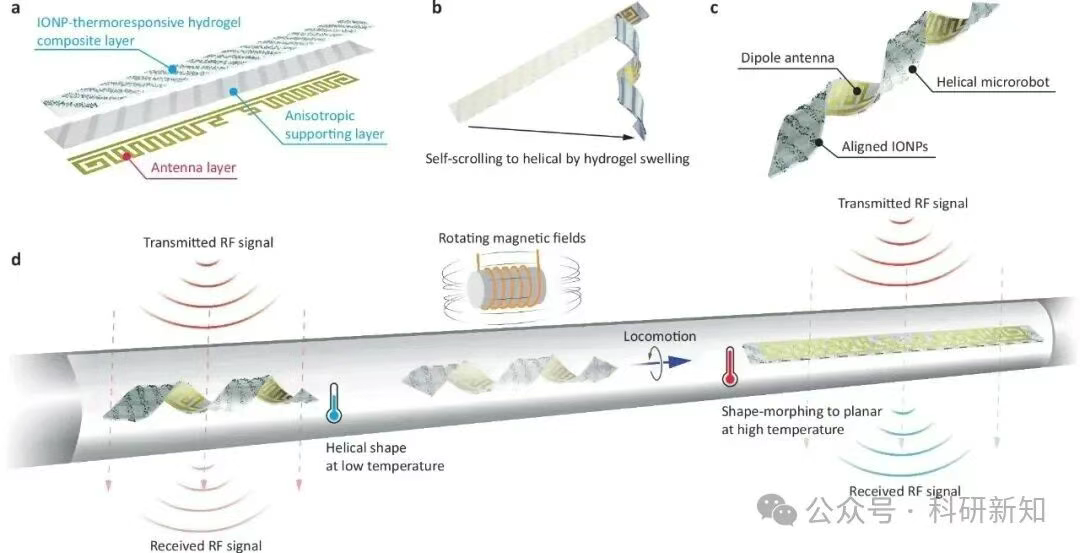
图1:用于远程形状传感微型机器人的柔性电子和软微型机器人的集成
微生物尽管尺寸微小,却展现出强大的智能,使其能够通过适应和通信在复杂环境中生存。例如,大肠杆菌利用膜化学感受器检测氨基酸,调整鞭毛旋转以导航至营养源。此外,通过一种称为群体感应的通信过程,这些细菌监测种群密度并交换化学信号,以协调集体行为并动态调控基因表达。某些细菌还能通过热趋向性或磁趋向性响应温度和磁场等物理线索。
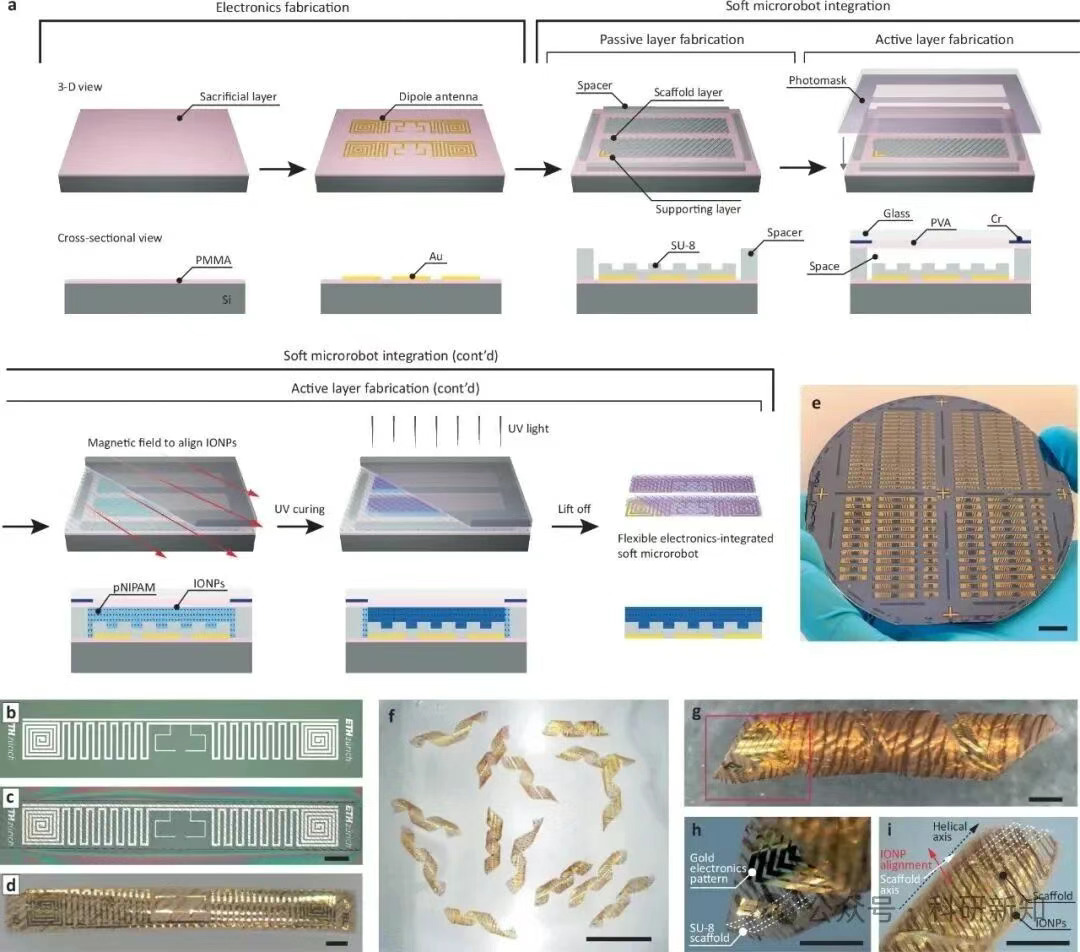
图2:柔性电子集成到微型软体机器人
受这些自然策略的启发,机器人学家已将微尺度智能原理融入微型机器人设计中。一种核心方法是使用响应多种刺激的功能材料,使微型机器人能够自主感知、处理信息和导航。尽管与微纳尺度制造相关的挑战重重,智能微型机器人系统的开发已取得显著进展,范围涵盖软体、复合、可重构设计,以及可编码、多功能和集成系统。通过结合各向异性磁设计,研究人员为多功能微型机器人平台引入了改进的导航和前所未有的功能。这些个体微型机器人进一步发展到多尺度、多模态、多智能体、层次化、自组织和群体行为。在此过程中,它们扩展了在环境修复、微操作、医学和传感等领域的应用。
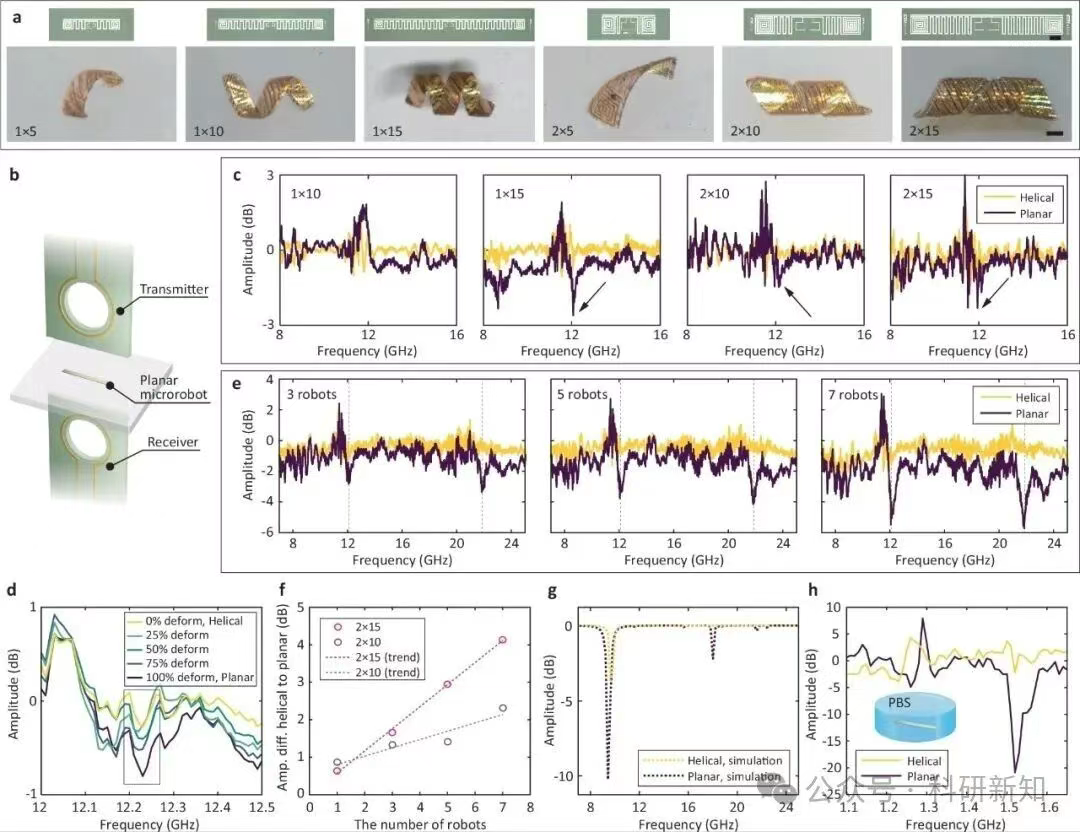
图3:通过RF通信的设计参数研究和形状检测性能
微尺度智能的一个重要方面侧重于通信和集体行为。通过通信,简单的局部交互可以发展成精细复杂的群体交互,从而实现复杂的模式和行动。这种协调合作使得设计个体复杂性较低但作为集体更精通的微型机器人成为可能。此外,微型机器人通过与外部代理的通信,可以获得超越细菌等外部代理的额外优势,从而增强定位、环境监测和自主性。
图片
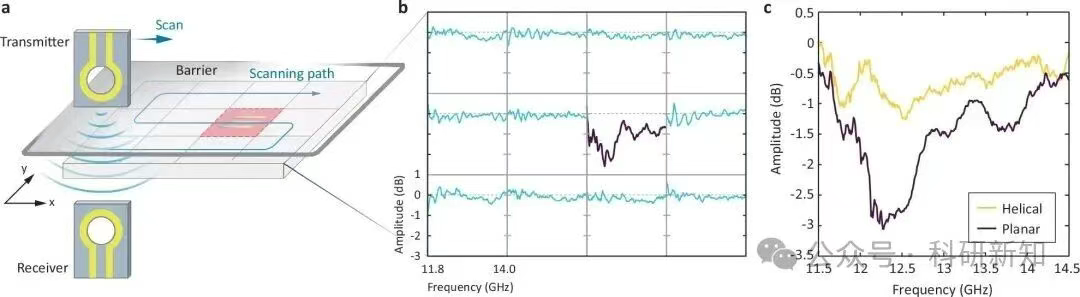
图4:基于射频通信的微型机器人定位
这些技术能够集成到微型机器人中,得益于过去几十年微制造技术的进步,包括MEMS)和CMOS中常用的技术,以及新兴方法如3D激光直写技术。例如,Bandari等人利用微制造技术制造了基于应变工程化学推进形式的感应供电微型机器人,Miskin等人则集成了光伏电池和表面电化学致动器,制造了光驱微型机器人。尽管先进的制造技术为驱动方法展示了可能性,但这些实现仍然缺乏实际应用效用的关键能力。即,这些微型机器人无法与外部系统实时通信其环境信息。
图片
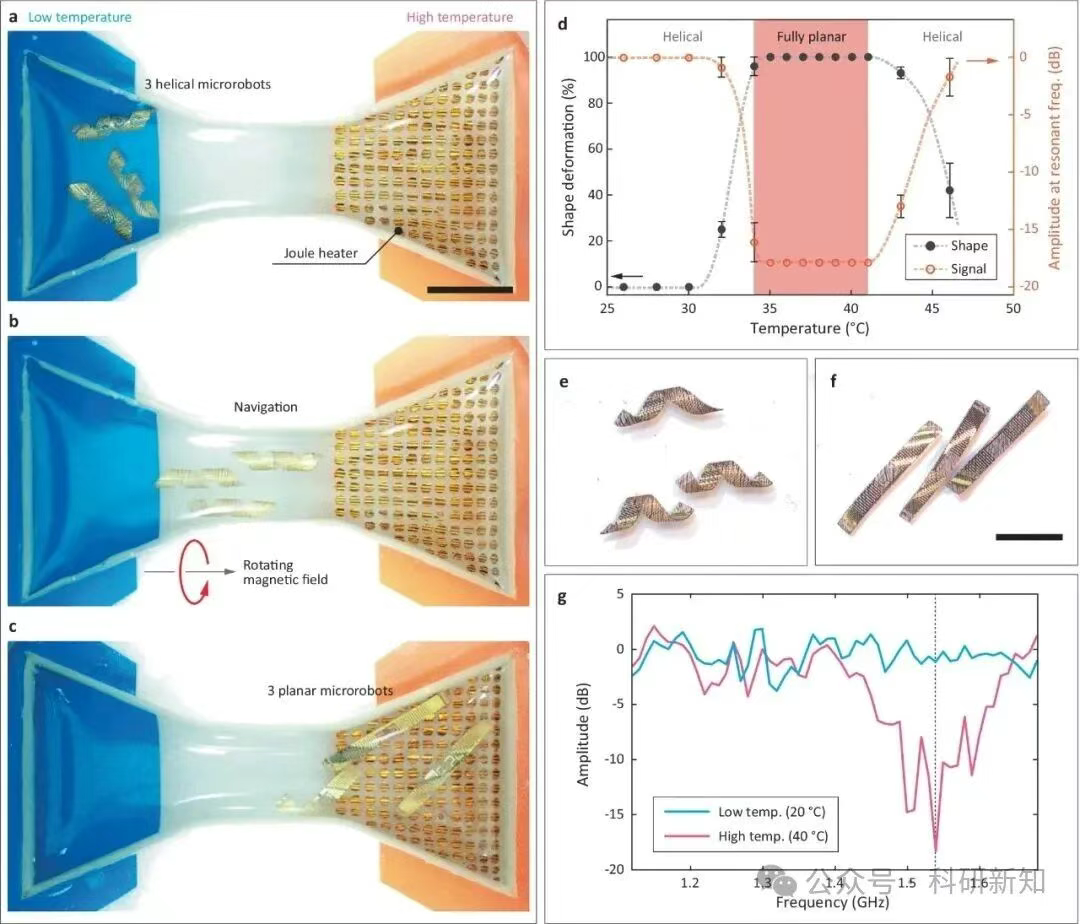
图5:使用三个微型机器人演示磁导航、热响应形状重构和远程形状感知
本研究旨在通过一种将柔性电子器件和形状可重构软体微型机器人集成到单一设备中的微型机器人方法来回答这个问题。这利用了智能材料,使微型机器人能够响应局部刺激产生巨大的物理变化,以及一种能够利用整个微型机器人表面来传播信号的柔性电子天线设计。通过将两者耦合,微型机器人结构的物理变化在天线信号中产生同等显著的变化,从而在完全柔性的微型机器人系统中实现即时远程通信。为了实现这一点,我们开发了一种集成协议,将各向异性的SU-8被动层与嵌入氧化铁纳米颗粒(IONP)的热响应水凝胶活性层相结合,实现了温度依赖的螺旋到平面转变功能。随后,我们层压了一个柔性偶极天线用于无线通信,从而完成了微型机器人的制造。该微型机器人展示了磁导航、基于射频通信的形状检测、定位和远程温度传感。多个微型机器人的集体行为表现出增强的射频信号灵敏度和更高的可靠性。
文章标题:
Soft magnetic microrobots with remote sensing and communication capabilities