部分图例参考于: 互联网, 如有版权问题,请告知,立即删除
作者:黄老师
一、图的存储结构
不同算法适配不同的存储结构,选择合适的存储方式是实现算法的基础:
1. 邻接矩阵(二维数组)
cpp
// 适用于稠密图,顶点数n较小的情况
const int MAXN = 1005;
int graph[MAXN][MAXN]; // graph[i][j]表示i到j的边权,无边时设为INF- 特点 :访问边的时间复杂度O(1),空间复杂度O(n²),适合顶点数少的场景(如Floyd算法)。

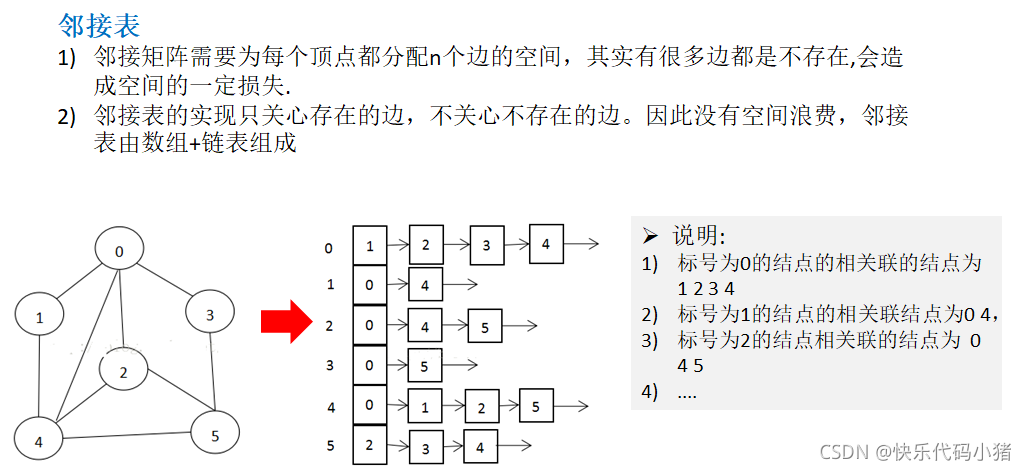
2. 邻接表(vector/链表)
cpp
// 适用于稀疏图,顶点数n大、边数m少的情况
const int MAXN = 1e5 + 5;
vector<pair<int, int>> adj[MAXN]; // adj[u]存储(u, v, w),即u到v的边权为w- 特点 :空间复杂度O(m),遍历邻接点高效,适合DFS/BFS/Dijkstra/Prim等算法。
3. 边集数组(结构体数组)
cpp
// 适用于按边操作的算法(如Kruskal)
struct Edge {
int u, v, w;
bool operator<(const Edge& other) const {
return w < other.w; // 按边权排序
}
} edges[MAXM]; // MAXM为边数- 特点:直接存储所有边,便于排序和筛选,是Kruskal算法的首选。

二、各算法详解(存储结构+核心思路+速记口诀)
1. 图的遍历:DFS(深度优先搜索)
存储结构
邻接表(优先)或邻接矩阵。
核心思路
- 从起点出发,沿着一条路径走到头(递归/栈实现);
- 回溯后探索其他未访问的分支,标记已访问节点避免重复。
代码框架(邻接表)
cpp
bool visited[MAXN];
void dfs(int u) {
visited[u] = true; // 标记访问
for (auto& [v, w] : adj[u]) { // 遍历邻接点
if (!visited[v]) {
dfs(v); // 递归访问
}
}
}速记口诀
"一条路走到黑,回头再探其他路"

2. 图的遍历:BFS(广度优先搜索)
存储结构
邻接表(优先)或邻接矩阵。
核心思路
- 从起点出发,先访问所有邻接点(第一层);
- 再依次访问邻接点的邻接点(第二层),用队列实现"逐层扩散"。
代码框架(邻接表)
cpp
bool visited[MAXN];
void bfs(int start) {
queue<int> q;
q.push(start);
visited[start] = true;
while (!q.empty()) {
int u = q.front(); q.pop();
for (auto& [v, w] : adj[u]) {
if (!visited[v]) {
visited[v] = true;
q.push(v);
}
}
}
}速记口诀
"队列排队,逐层扫荡,先近后远"


动画模拟BFS、DFS过程:
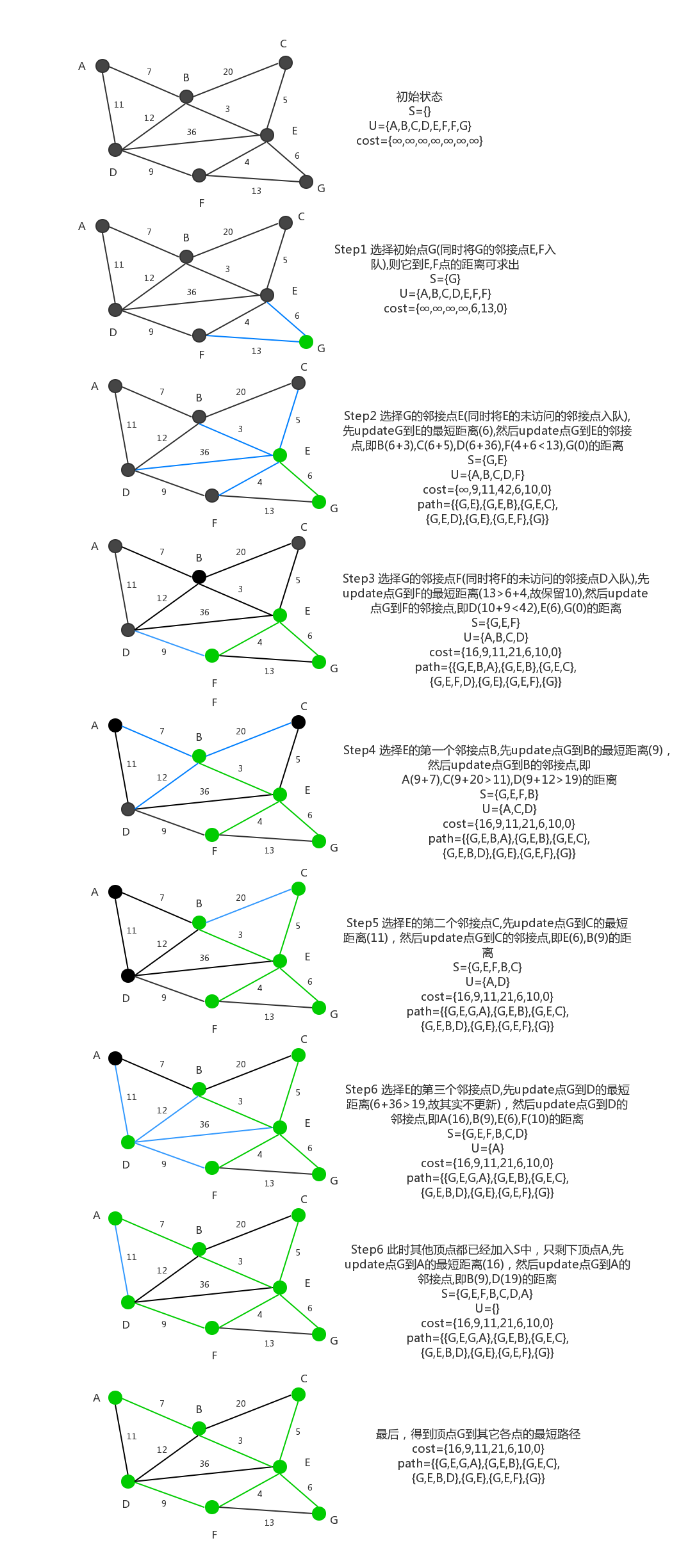
3. 最短路:Dijkstra(单源最短路径,无负权边)
存储结构
邻接表(优先)+ 优先队列(小根堆)。
核心思路
- 初始化起点到各点的距离为INF,起点距离为0;
- 用优先队列选当前距离最小的节点u,松弛其邻接点v(即
dist[v] = min(dist[v], dist[u]+w)); - 重复直到所有节点处理完毕。
代码框架(邻接表+优先队列)
cpp
const int INF = 0x3f3f3f3f;
int dist[MAXN];
void dijkstra(int start, int n) {
memset(dist, 0x3f, sizeof(dist));
dist[start] = 0;
priority_queue<pair<int, int>, vector<pair<int, int>>, greater<>> pq;
pq.push({0, start});
while (!pq.empty()) {
auto [d, u] = pq.top(); pq.pop();
if (d > dist[u]) continue; // 跳过已处理的旧节点
for (auto& [v, w] : adj[u]) {
if (dist[v] > dist[u] + w) {
dist[v] = dist[u] + w;
pq.push({dist[v], v});
}
}
}
}速记口诀
"小堆选近点,松弛邻接点,贪心找最短"
Prim算法,Kruskal算法,Dijkstra算法,Floyd算法的过程讲解
4. 最短路:Floyd(多源最短路径,允许负权边无负环)
存储结构
邻接矩阵(必须)。
核心思路
- 动态规划思想:
dp[k][i][j]表示经过前k个节点时i到j的最短路径; - 状态转移:
dp[i][j] = min(dp[i][j], dp[i][k]+dp[k][j])(k为中转点); - 三层循环:枚举中转点k→起点i→终点j。
代码框架(邻接矩阵)
cpp
const int INF = 0x3f3f3f3f;
int dp[MAXN][MAXN];
void floyd(int n) {
// 初始化dp为邻接矩阵
for (int k = 1; k <= n; k++) { // 中转点
for (int i = 1; i <= n; i++) { // 起点
for (int j = 1; j <= n; j++) { // 终点
dp[i][j] = min(dp[i][j], dp[i][k] + dp[k][j]);
}
}
}
}速记口诀
"中转点插中间,三层循环算遍,dp找最短"
5. 最小生成树:Prim(稠密图适用)
存储结构
邻接矩阵(稠密图)或邻接表+优先队列(稀疏图)。
核心思路
- 从任意起点出发,维护"已选点集合";
- 每次选连接"已选集合"和"未选集合"的最小权边,将对应点加入集合;
- 重复直到所有点加入(共选n-1条边)。
代码框架(邻接表+优先队列)
cpp
const int INF = 0x3f3f3f3f;
int dist[MAXN]; // dist[v]表示v到已选集合的最小距离
bool visited[MAXN];
int prim(int n) {
memset(dist, 0x3f, sizeof(dist));
memset(visited, false, sizeof(visited));
dist[1] = 0; // 从1号点开始
int sum = 0; // 最小生成树总权值
for (int i = 1; i <= n; i++) {
// 选未访问的最小dist节点
int u = -1;
for (int j = 1; j <= n; j++) {
if (!visited[j] && (u == -1 || dist[j] < dist[u])) {
u = j;
}
}
visited[u] = true;
sum += dist[u];
// 更新邻接点到已选集合的距离
for (auto& [v, w] : adj[u]) {
if (!visited[v] && w < dist[v]) {
dist[v] = w;
}
}
}
return sum;
}速记口诀
"选点扩集合,贪最小边连,n-1边成团"
6. 最小生成树:Kruskal(稀疏图适用)
存储结构
边集数组(必须)+ 并查集(判环)。
核心思路
- 将所有边按权值从小到大排序;
- 依次选边,若边的两个端点不在同一连通分量(用并查集判断),则加入生成树;
- 重复直到选n-1条边。
代码框架(边集数组+并查集)
cpp
struct Edge { int u, v, w; };
Edge edges[MAXM];
int parent[MAXN];
// 并查集查找(带路径压缩)
int find(int x) {
return parent[x] == x ? x : parent[x] = find(parent[x]);
}
int kruskal(int n, int m) {
sort(edges, edges + m); // 按边权排序
for (int i = 1; i <= n; i++) parent[i] = i; // 初始化并查集
int sum = 0, cnt = 0; // sum总权值,cnt选边数
for (int i = 0; i < m; i++) {
int u = edges[i].u, v = edges[i].v, w = edges[i].w;
int fu = find(u), fv = find(v);
if (fu != fv) { // 不连通则合并
parent[fu] = fv;
sum += w;
cnt++;
if (cnt == n-1) break; // 选够n-1条边
}
}
return sum;
}速记口诀
"边排序选小,并查集判环,连n-1边好"

动画演示:
7. 拓扑排序:Kahn算法(处理DAG)
存储结构
邻接表(存边)+ 入度数组(存节点入度)。
核心思路
- 初始化队列,将入度为0的节点入队;
- 取出队首节点u,加入拓扑序列,遍历其邻接点v,将v的入度减1;
- 若v的入度变为0则入队,重复直到队空;
- 若拓扑序列长度≠节点数,说明有环。
代码框架(邻接表+入度数组)
cpp
vector<int> adj[MAXN];
int in_degree[MAXN];
vector<int> topo_sort(int n) {
queue<int> q;
vector<int> res;
for (int i = 1; i <= n; i++) {
if (in_degree[i] == 0) q.push(i);
}
while (!q.empty()) {
int u = q.front(); q.pop();
res.push_back(u);
for (int v : adj[u]) {
in_degree[v]--;
if (in_degree[v] == 0) q.push(v);
}
}
return res; // 若res.size() < n则有环
}速记口诀
"入度零入队,删边减度数,依次排顺序"

8. 关键路径算法(处理DAG的最长路径)
存储结构
邻接表(存边)+ 逆邻接表(用于求ve/vl)。
核心思路
- 步骤1 :拓扑排序,求事件最早发生时间
ve[i](ve[v] = max(ve[v], ve[u]+w)); - 步骤2 :逆拓扑排序,求事件最迟发生时间
vl[i](vl[u] = min(vl[u], vl[v]-w)); - 步骤3:计算活动最早/最迟开始时间,若相等则为关键活动,关键活动组成关键路径。
速记口诀
"拓扑算ve,逆序算vl,相等是关键"
三、算法速查表
| 算法 | 存图结构 | 核心 3 步 | 口诀(10 字内) | 模板行数 | 核心思想 |
|---|---|---|---|---|---|
| DFS/BFS | 邻接表 vector<int> g[N] |
1.队列/栈 2.访标记 3.拓邻居 | "栈深队广,标邻" | 10 行 | 搜索(回溯/广度优先) |
| Dijkstra | 邻接表 vector<P> g[N] |
1.小根堆 2.松弛 3.vis 防重 | "堆松 vis" | 15 行 | 贪心算法 |
| Floyd | 矩阵 int d[N][N] |
1.自环初值 2.kij 中转 3.更优更新 | "kij 中转" | 5 行 | 动态规划 |
| Prim | 邻接表 vector<P> g[N] |
1.小根堆 2.跨边入堆 3.累加答案 | "跨边堆" | 15 行 | 贪心算法 |
| Kruskal | 边集 vector<Edge> e |
1.按权排序 2.并查加边 3.n-1 结束 | "排并加" | 12 行 | 贪心算法 + 并查集 |
| Khan 拓扑 | 邻接表 + 入度数组 | 1.入度 0 入队 2.删边降度 3.队空判环 | "0 队降" | 12 行 | 拓扑排序(贪心) |
| 关键路径 | 邻接表 + 逆邻接表 | 1.拓扑正序算 ve 2.逆序算 vl 3.边 e=l=ve, l=vl-w, 关键=e==l | "正 ve 逆 vl" | 20 行 | 动态规划 + 拓扑排序 |
四、学习总结与推荐
学习步骤推荐
- 先把口诀抄三遍,读出声,强化核心逻辑记忆;
- 把模板打印,在空白处默写核心3步,理解算法骨架;
- 上机刷5~10道经典裸题,巩固代码实现能力。
经典练习题单
| 算法 | 百炼题号(标题) | 直达链接 |
|---|---|---|
| DFS/BFS | 2810 - 迷宫问题 | https://bailian.openjudge.cn/practice/2810 |
| BFS 最短路 | 2796 - 骑士移动 | https://bailian.openjudge.cn/practice/2796 |
| Dijkstra | 2724 - 最短路 | https://bailian.openjudge.cn/practice/2724 |
| Floyd | 2725 - 全源最短路 | https://bailian.openjudge.cn/practice/2725 |
| Prim | 2727 - 最小生成树 | https://bailian.openjudge.cn/practice/2727 |
| Kruskal | 2728 - 丛林之路 | https://bailian.openjudge.cn/practice/2728 |
| Khan 拓扑 | 2722 - 拓扑排序 | https://bailian.openjudge.cn/practice/2722 |
| 关键路径 | 2730 - 关键路径 | https://bailian.openjudge.cn/practice/2730 |
| 综合 DFS+剪枝 | 2692 - 八皇后问题 | https://bailian.openjudge.cn/practice/2692 |
| 综合 最短路+堆优化 | 2757 - 网络延时 | https://bailian.openjudge.cn/practice/2757 |
总结
- 存储结构选型:邻接表适配多数遍历/最短路径/生成树算法,邻接矩阵是Floyd专属,边集数组为Kruskal定制;
- 算法核心逻辑:DFS/BFS是遍历基础,Dijkstra/Floyd解决最短路径,Prim/Kruskal构建最小生成树,拓扑排序处理DAG依赖,关键路径分析DAG最长路径;
- 学习关键方法:口诀记核心、模板搭骨架、刷题练实战,三步结合可高效掌握图论算法。
视频学习资源:
图论:最小生成树之kruscal算法-哔哩哔哩
图论:最小生成树之prim算法-哔哩哔哩
最短路径算法(BFS、Dijkstra、Floyd)-哔哩哔哩
C++ 图论的基础概念-哔哩哔哩
图论:最短路算法之Dijkstra(堆优化版)| 迪杰斯特拉算法-哔哩哔哩