一、相机驱动安装
我仔细阅读了一下官网的说明,发现有两种安装方式,一种是编译源码安装,一种是apt方式,我个人比较建议从源码安装。所以这篇文章也是记录从源码安装的流程。网上的资料很乱,看得人好心累~
官网:
https://github.com/realsenseai 这是总仓库
https://github.com/realsenseai/librealsense/blob/master/doc/installation.md 从源码安装
https://github.com/realsenseai/librealsense/blob/v2.53.1/doc/distribution_linux.md apt方式安装
参考资料:
https://blog.csdn.net/weixin_58120495/article/details/135246634
https://liangbm3.site/blog/d435i-pei-zhi-jiao-cheng
https://blog.csdn.net/massive_jiang/article/details/148773643
建议大家还是读官方的文档,虽然英文的读起来很烦,QAQ
🟦 Ubuntu 20.04:从源码构建并安装 librealsense2(完整教程)
Intel RealSense SDK 2.0 在 Linux 上需要 构建 SDK + 为内核打补丁 + 安装编译好的库 。
下面的操作适用于:Ubuntu 20.04(LTS 内核 5.4, 5.8, 5.13 等)。
① 更新系统 & 安装依赖
(1)先更新系统:
sudo apt-get update && sudo apt-get upgrade && sudo apt-get dist-upgrade看了教程说第三个命令最好不要执行,所以我没执行
(2)安装核心依赖(SSL、USB、Udev、GTK 等):
sudo apt-get install libudev-dev pkg-config libgtk-3-dev
sudo apt-get install libusb-1.0-0-dev pkg-config
sudo apt-get install libglfw3-dev
sudo apt-get install libssl-dev② 获取 librealsense2 源码
git clone https://github.com/IntelRealSense/librealsense.git
cd librealsense这一步我是直接到官网下载的zip,下载版本为V2.53,这一步需要关注你的ubuntu内核版本,我的是5.15,本来最开始我下载的是V2.50,结果在后续步骤中发现打补丁的脚本对应不上。
③ 配置 RealSense 的 USB 权限(必须)
./scripts/setup_udev_rules.sh如需卸载:
./scripts/setup_udev_rules.sh --uninstall
④ 为 Ubuntu 内核 打补丁并替换 uvcvideo 模块(RealSense 必需)
在这之前,需要关注你自己的ubuntu版本和内核版本,我的是ubuntu20.04,内核5.15,参考这篇:
https://blog.csdn.net/massive_jiang/article/details/148773643
这一步一定版本一定要对应起来
Ubuntu 20.04 + LTS/HWE 内核(5.15/5.19/6.5):
./scripts/patch-realsense-ubuntu-lts-hwe.sh我在这一步执行的时候失败了,但最后也成功驱动了相机,我猜想可能5.15的内核环境已经能兼容上了。不管了,能跑起来就行。
Ubuntu 20.04 原始 LTS 内核(< 5.13):
./scripts/patch-realsense-ubuntu-lts.sh脚本会自动执行:
- 下载相应内核源代码
- 为 uvcvideo 驱动打 RealSense 补丁
- 编译新的 uvcvideo
- 尝试插入替换已在运行的驱动
如果失败,会恢复原始驱动。
⑤ 检查补丁是否成功
sudo dmesg | tail -n 50
日志中应看到类似:
uvcvideo: RealSense firmware XYZ
uvcvideo: Driver version: realsense ...
⑥ 构建 librealsense2 SDK 本体
(1)进入源码根目录:
cd ~/librealsense
mkdir build && cd build(2)默认构建:
cmake ../(3)推荐:构建 SDK + 所有示例:
cmake ../ -DBUILD_EXAMPLES=true若服务器/无图形环境:
cmake ../ -DBUILD_EXAMPLES=true -DBUILD_GRAPHICAL_EXAMPLES=false
(4)开始编译(多核心):
make -j$(($(nproc)-1))这一步会比较慢,耐心等待
(5)安装:
sudo make install如想强制卸载重编译:
sudo make uninstall
make clean
⑦ 安装路径说明(用于配置你的应用)
- 共享库安装在:/usr/local/lib/
- 头文件安装在:/usr/local/include/
- 示例程序在:/usr/local/bin/
因此你编写 C++ 程序时使用:
g++ main.cpp -lrealsense2
即可链接。
⑧ 运行 RealSense Viewer 测试
一定要用usb3.0连接相机,买质量好一点的线
插入相机后执行:
realsense-viewer能正确显示深度图、RGB、IMU 时代表成功。
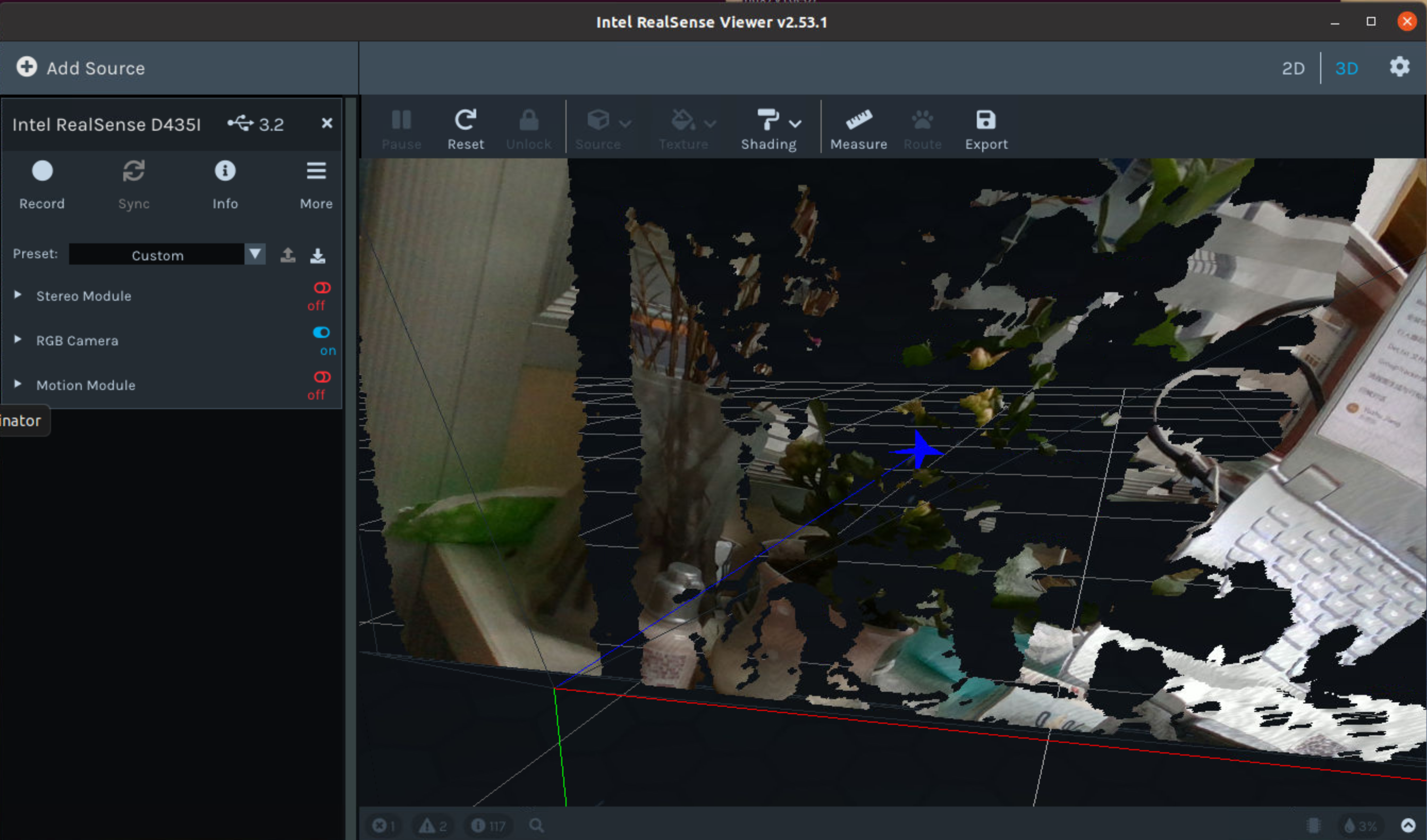
以上就是驱动安装的全部过程,主要是要注意ubuntu内核版本与驱动版本。
二、ROS接口安装
官网:
https://github.com/realsenseai/realsense-ros/tree/ros1-legacy
此处注意你的ros版本,我给的链接是ros1的,我的ros版本是notic。
参考资料:https://blog.csdn.net/u013454780/article/details/133255733
https://blog.csdn.net/luoganttcc/article/details/131711823
1. 创建ROS工作区
mkdir -p ~/realsense_ros_ws/src
cd ~/realsense_ros_ws/src2. 克隆仓库
由于我的电脑用git永远不成功,所以我是直接去官网下载的zip,但这样会出现版本的问题,不管了 ,自主选择一下吧
https://github.com/realsenseai/realsense-ros.git
git clone https://github.com/pal-robotics/ddynamic_reconfigure.git3. 返回根目录编译
catkin_make4. 设置环境变量
echo "source ~/your_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
source setup.bash5. 启动节点
roslaunch realsense2_camera rs_camera.launch6. 查看
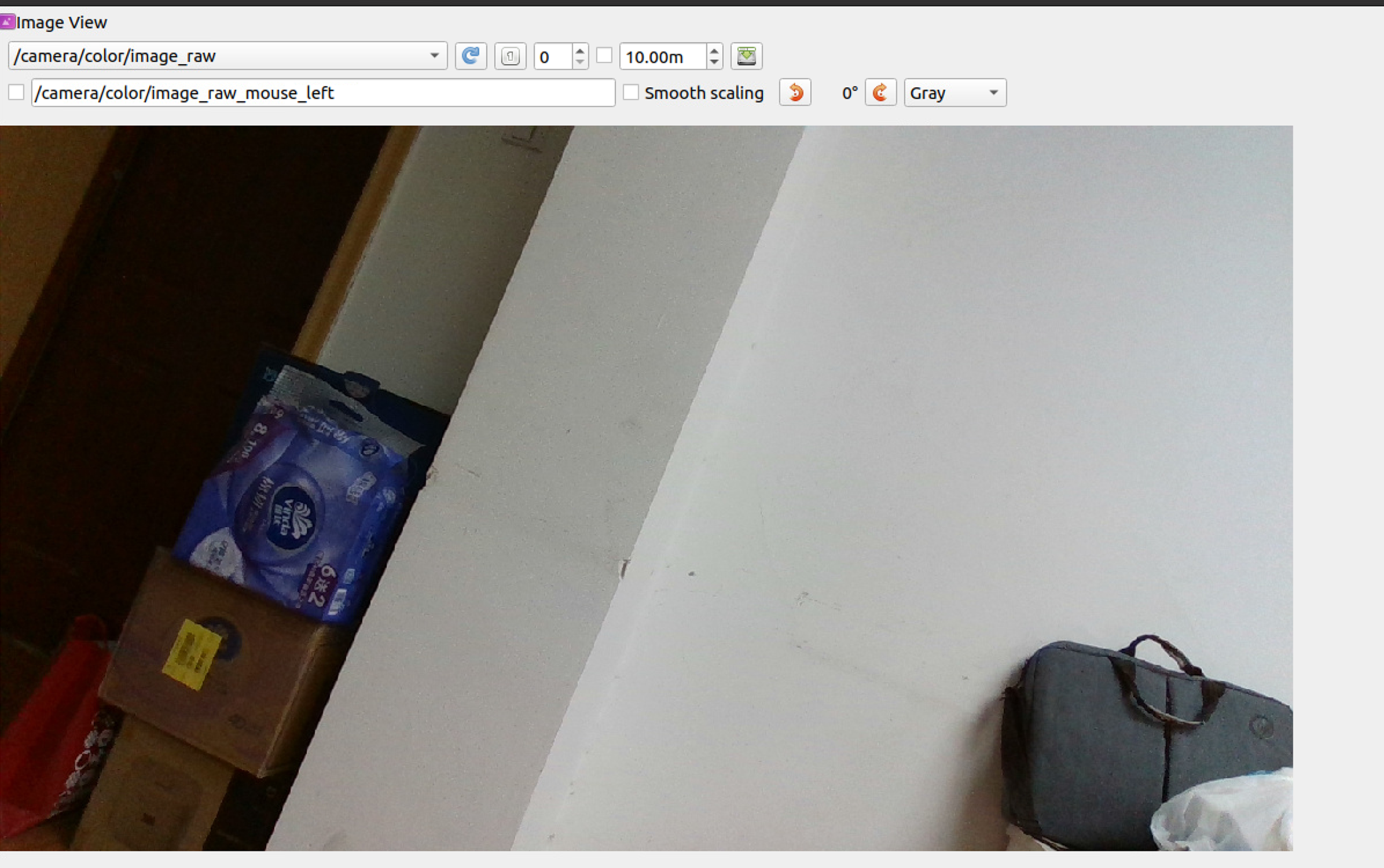
(1)使用rqt_image_view
sudo apt-get install ros-noetic-rqt-image-view
rqt_image_view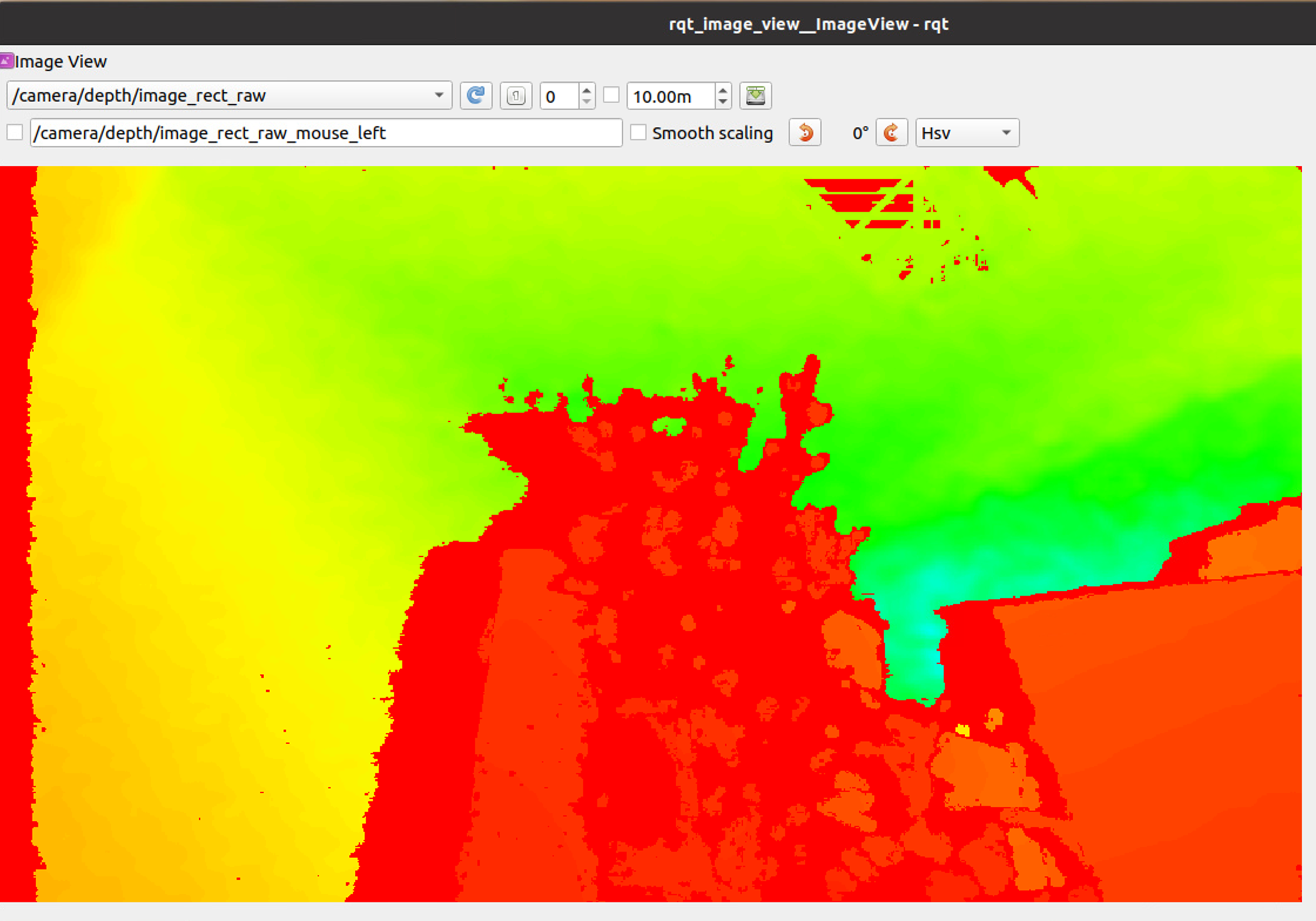
(2)也可以启动rviz来查看,这种方法更实用
sudo apt-get install ros-noetic-rviz
roslaunch realsense2_camera rs_camera.launch #这是启动摄像头节点注意fixed frame的选择和话题名称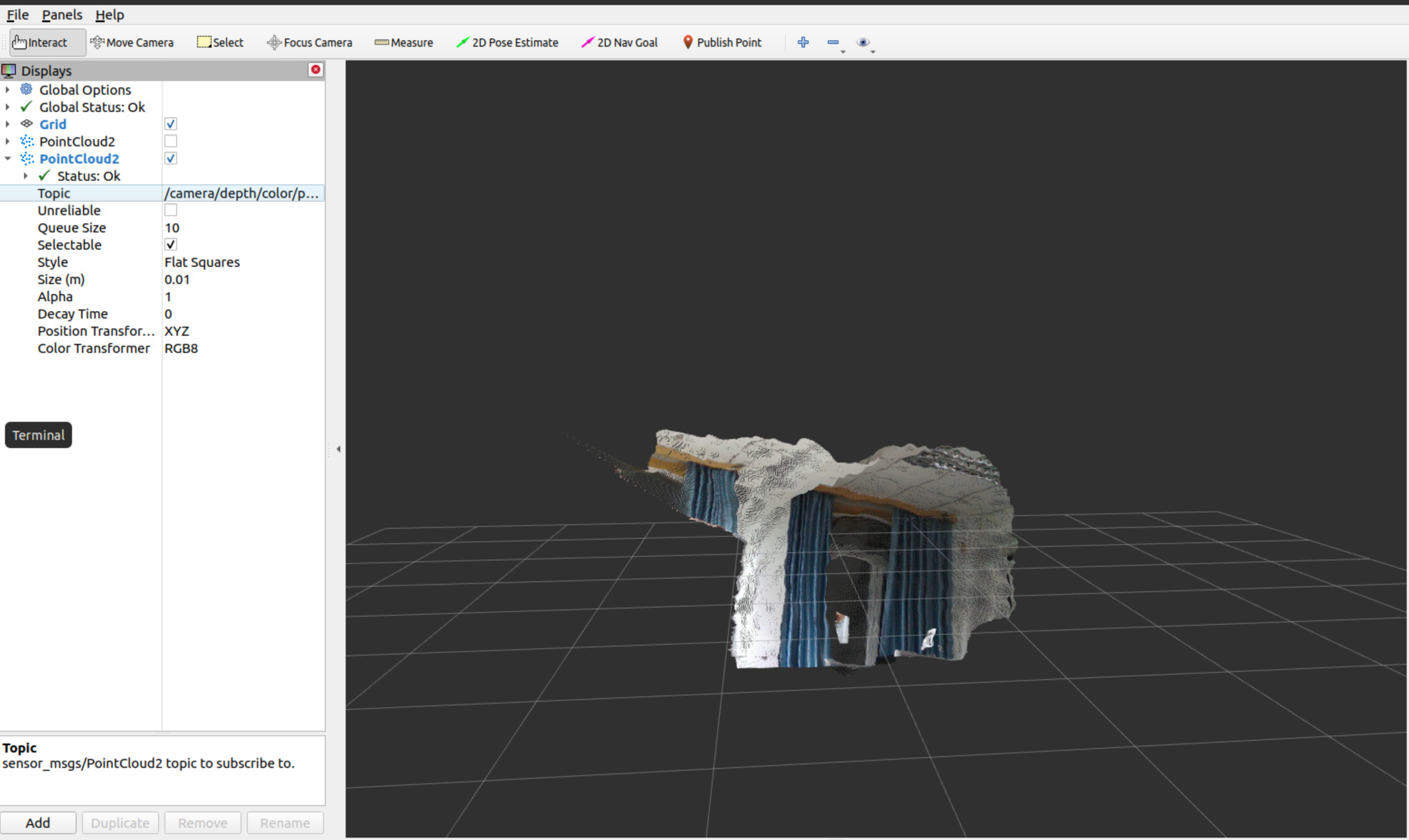
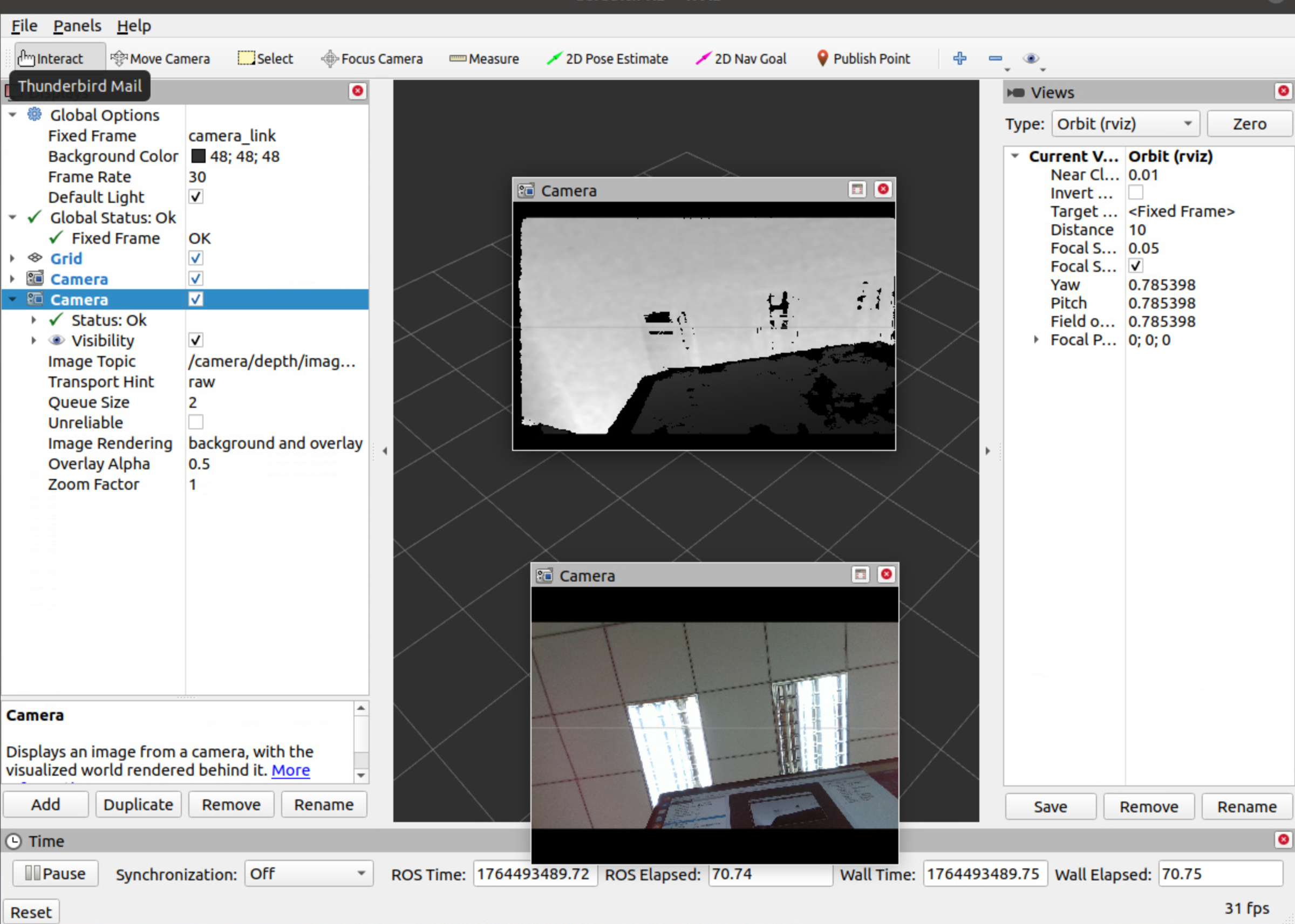 这样,我们就通过启动ros节点获得了相机的话题。
这样,我们就通过启动ros节点获得了相机的话题。