目录
[PCGrad 多任务梯度修正的迭代流程与核心细节](#PCGrad 多任务梯度修正的迭代流程与核心细节)
[图 4:PCGrad 理论条件的实证分析(基于 RL 任务训练过程)](#图 4:PCGrad 理论条件的实证分析(基于 RL 任务训练过程))
[右图:SAC 与 SAC+PCGrad 的任务平均回报](#右图:SAC 与 SAC+PCGrad 的任务平均回报)
解决问题
在本文中,我们识别出多任务优化 landscape 中导致有害梯度干扰 的三个关键条件,并提出一种简单且通用的方法来避免任务梯度间的此类干扰。我们设计了一种梯度修正策略 :对于存在梯度冲突的任意两个任务,将其中一个任务的梯度投影到另一个任务梯度的法平面上。在一系列具有挑战性的多任务监督学习和多任务强化学习问题中,该方法显著提升了学习效率和性能。此外,该方法具有模型无关性,可与现有多任务架构结合使用,进一步提升性能。
该方法的核心创新的是通过梯度投影消除冲突:对于任务 A 和任务 B,若梯度方向冲突(如夹角大于 90°),将任务 A 的梯度投影到任务 B 梯度的法平面上,得到新梯度 ------ 新梯度与任务 B 的梯度垂直,从而消除两者的冲突,让参数更新同时兼顾两个任务的优化需求。这种方式区别于 GradNorm 的 "梯度幅度调节",更侧重 "梯度方向修正",是解决梯度干扰的另一类核心思路。
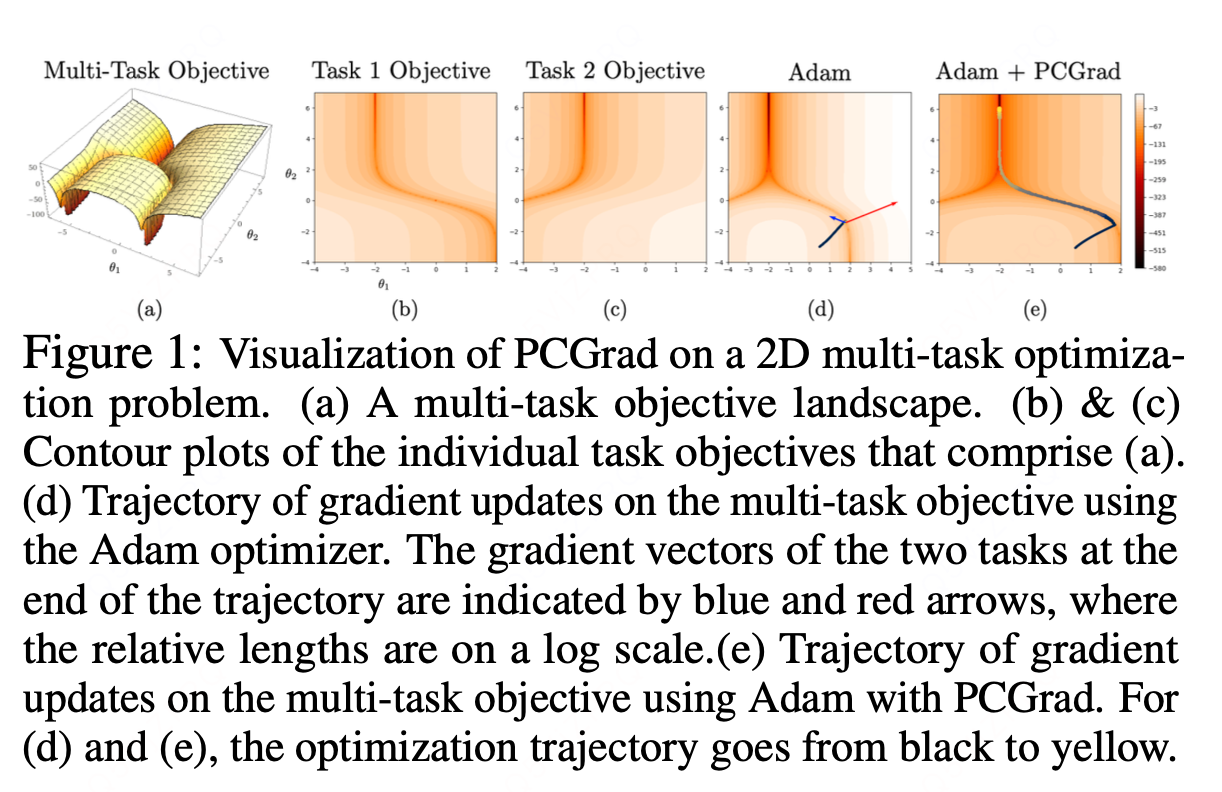
作为一个直观示例,我们来看图 1a-c 中两个任务目标的二维优化空间。每个任务的优化空间都包含一条深谷 ------ 这一特性已在神经网络优化空间的研究中被观察到 22,且每个谷底的特征是高正曲率 与任务梯度幅度的巨大差异。在这种情况下,多任务总梯度会被其中一个任务的梯度主导,而这会以牺牲另一个任务的性能为代价。此外,由于高曲率的存在,主导任务的性能提升可能被高估,而非主导任务的性能下降则可能被低估。最终,优化器难以在整体优化目标上取得实质性进展。在图 1d 中,优化器虽已抵达任务 1 的深谷,但在 "梯度冲突、高曲率、梯度幅度差异大" 的参数区域(见图 1d 中绘制的梯度),无法沿着谷道继续推进优化。在 5.3 节中,我们通过实验发现,这种 "悲剧三要素" 在高维神经网络多任务学习问题中同样存在。
相关方法:
针对这类多任务学习问题,一种自然的解决方案是让网络联合训练所有任务,旨在挖掘任务间的共享结构,从而实现比独立解决单个任务更高的效率和性能。
然而,同时学习多个任务会带来严峻的优化挑战,有时甚至会导致整体性能和数据效率低于独立学习任务的情况 42, 50。
这类优化难题极为普遍,因此许多多任务强化学习算法采用了 "先独立训练,再蒸馏融合" 的思路:先将各任务独立训练为单独模型,再将这些独立模型蒸馏成一个多任务模型 32, 42, 50, 21, 56。这种方法虽能得到多任务模型,却丧失了多任务学习本应具备的效率优势。
方法
问题定义:
我们提出假设:多任务学习的核心优化问题源于冲突梯度------ 当不同任务的梯度内积为负时,表明它们方向相反(相互背离)。但冲突梯度本身并非有害:事实上,简单对任务梯度取平均,理论上应能获得多任务目标函数的最优下降方向。然而,在特定条件下,这类冲突梯度会导致性能显著下降。
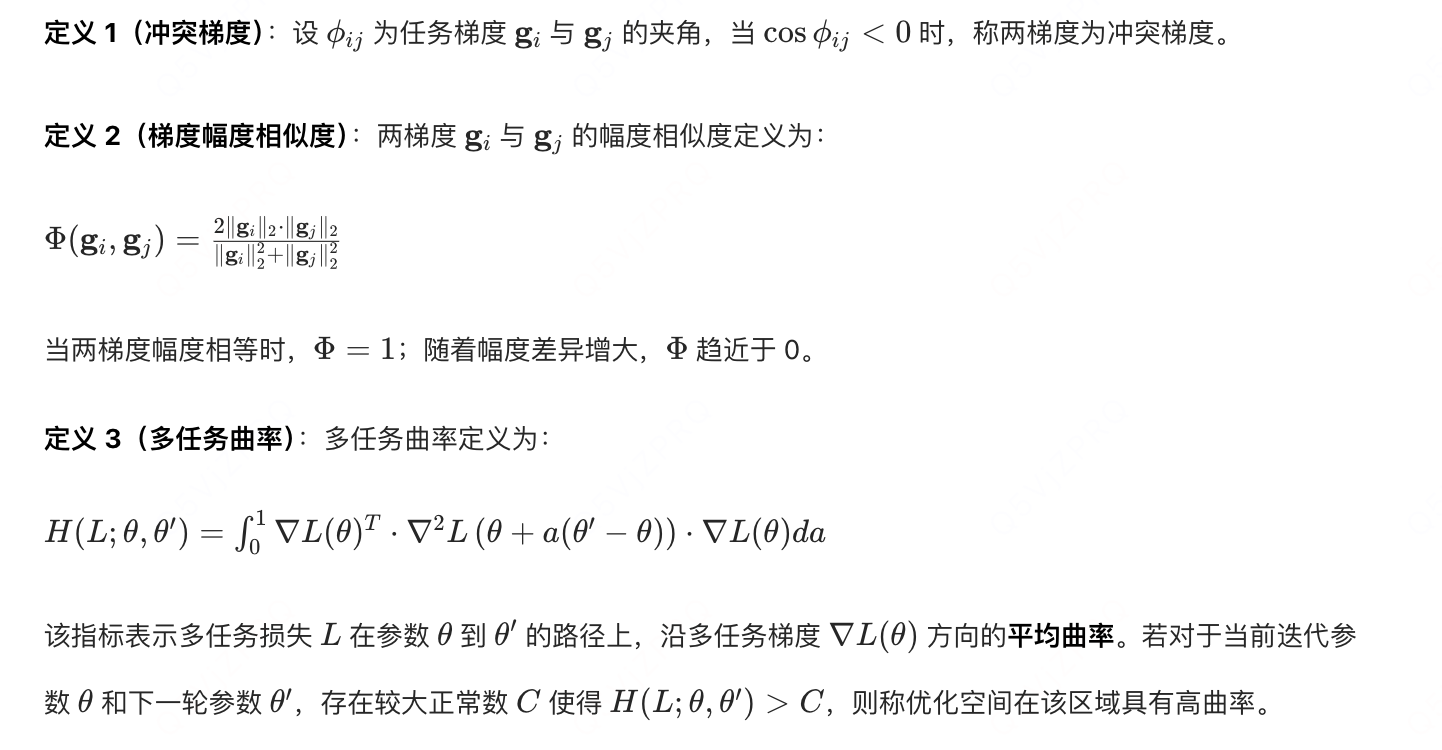
以双任务优化问题为例:若一个任务的梯度幅度远大于另一个,前者会主导平均梯度;若任务梯度方向上同时存在高正曲率,则主导任务的性能提升可能被大幅高估,而非主导任务的性能下降可能被大幅低估。因此,我们将这三个条件的同时出现定义为 "悲剧三要素"(tragic triad),具体描述如下:(a) 多个任务的梯度存在冲突(方向相反);(b) 梯度幅度差异显著,导致部分任务梯度主导全局;(c) 多任务优化空间存在高曲率。
以下是三个条件的形式化定义:
在优化过程中,PCGrad 通过以下简洁流程消除梯度冲突:若两个任务的梯度存在冲突(即余弦相似度为负),则将每个任务的梯度投影到另一个任务梯度的法平面上。这一操作本质是移除梯度中与其他任务冲突的分量,从而减少任务间的破坏性梯度干扰。该核心思想的可视化示意如图 2 所示。

PCGrad 多任务梯度修正的迭代流程与核心细节
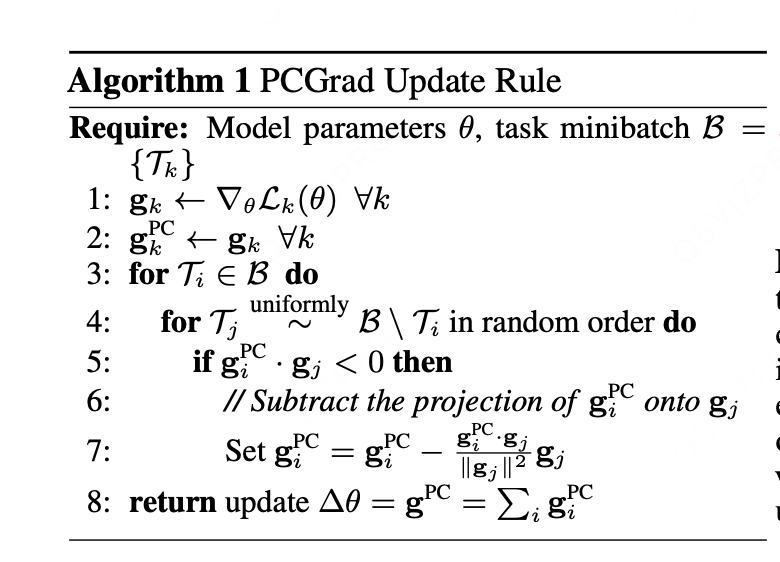
PCGrad 会按以下方式完成所有任务的梯度修正,确保批次内任务间的梯度干扰最小化:
-
批次任务遍历逻辑 :对于当前训练批次中的每个任务 \(T_i\)(目标任务),从批次内所有其他任务 \(T_j\)(\(j \neq i\),共 \(T-1\) 个任务,T 为批次内任务数)中随机采样并排序,按该随机顺序逐一处理每个 \(T_j\)。
-
迭代式梯度修正:对每个排序后的 \(T_j\),执行 "冲突判断→投影修正" 的流程(前文步骤 1-2):
- 首次处理 \(T_j_1\) 时,用原始梯度 \(\mathbf{g}i\) 与 \(\mathbf{g}{j_1}\) 判断冲突,若冲突则投影修正,得到中间梯度 \(\mathbf{g}_i^{(1)}\);
- 接着处理 \(T_j_2\) 时,用更新后的 \(\mathbf{g}i^{(1)}\) 与 \(\mathbf{g}{j_2}\) 判断冲突,若冲突则继续投影修正,得到 \(\mathbf{g}_i^{(2)}\);
- 重复该过程直至遍历所有 \(T_j\),最终得到任务 \(T_i\) 的最终修正梯度 \(\mathbf{g}_i^{\text{PC}}\)。
-
全批次任务覆盖:对当前批次中的每个任务(\(T_1, T_2, ..., T_T\)),均执行上述 "随机遍历其他任务→迭代修正" 的流程,最终得到所有任务的修正梯度 \(\{\mathbf{g}_1^{\text{PC}}, \mathbf{g}_2^{\text{PC}}, ..., \mathbf{g}_T^{\text{PC}}\}\)。
-
参数更新:将所有修正后的梯度传入优化器(如 Adam、SGD),按多任务损失的梯度加权规则(\(\nabla L_{\text{total}} = \sum_i w_i \mathbf{g}_i^{\text{PC}}\),通常 \(w_i=1\))更新共享网络参数。
实验结论:
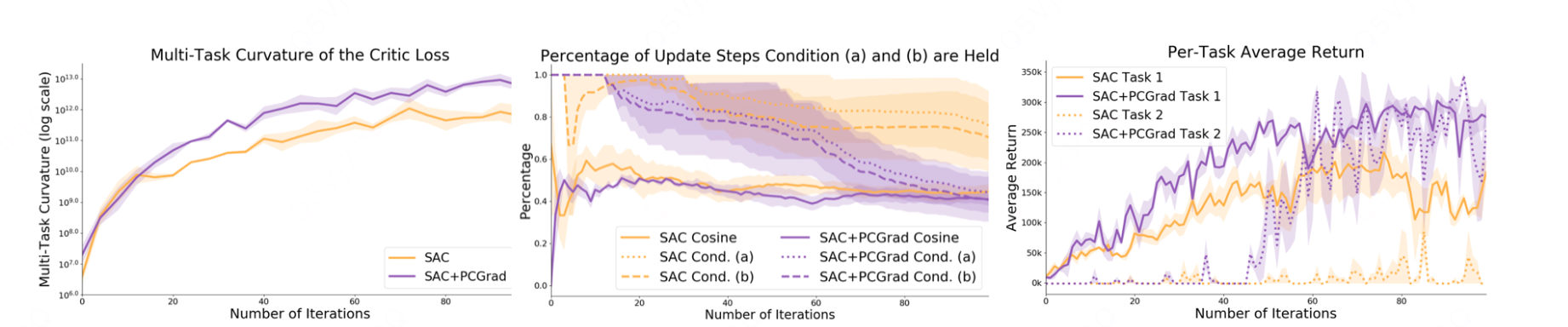
图 4:PCGrad 理论条件的实证分析(基于 RL 任务训练过程)
图 4 针对定理 2 中讨论的理论条件展开实证分析,展示了在两个强化学习任务("reach(抓取)" 和 "press button top(按压顶部按钮)")上训练前 100 轮的关键指标变化。
子图功能与结果解读
左图:多任务曲率的估计值
该图展示了训练过程中多任务曲率的动态变化,核心观察:训练全程均存在高多任务曲率。这为定理 2 中的条件(b)(高曲率)提供了直接实证支持 ------ 验证了 "悲剧三要素" 中的高曲率条件在实际多任务 RL 训练中持续存在,并非理论上的极端场景。
中图:梯度冲突与理论条件的满足比例
- 实线:两个任务梯度间余弦相似度为正的迭代轮次占比(即非冲突梯度的比例);
- 虚线:在余弦相似度为负的迭代轮次中,定理 2 的条件(a)(梯度冲突) 成立的比例;
- 点划线:在余弦相似度为负的迭代轮次中,定理 2 条件(b)的推论(\(\xi(\mathbf{g}_1, \mathbf{g}_2) \leq 1\)) 成立的比例(\(\xi\) 为梯度相关的辅助指标,具体定义见定理 2)。
核心观察:
- 对于 Adam 优化器(无 PCGrad)和 Adam+PCGrad 优化器,在尚未学会任务 2的阶段,条件(a)(梯度冲突)的满足比例始终处于高位(即梯度冲突频繁发生);
- 一旦 Adam+PCGrad 开始学会任务 2(对应右图中任务 2 的回报上升),条件(a)的满足比例立即下降 ------ 说明 PCGrad 通过消除梯度冲突(打破条件(a)),推动了任务 2 的学习进程。
右图:SAC 与 SAC+PCGrad 的任务平均回报
该图对比了纯 SAC 算法与 SAC+PCGrad 算法在两个任务上的平均回报(回报越高,任务学习效果越好):
- 纯 SAC 算法:任务 2 的回报长期处于低位,始终未能有效学会;
- SAC+PCGrad 算法:训练后期任务 2 的回报显著上升,成功掌握任务,且任务 1 的回报未受影响(保持高位)。
核心结论与理论条件的关联
结合中图与右图的结果,可得出关键洞察:条件(a)(梯度冲突)是 PCGrad 在多任务学习中表现优异的核心原因------ 当梯度冲突频繁发生时(条件(a)成立比例高),纯 SAC 算法因冲突导致任务学习停滞;而 PCGrad 通过消除梯度冲突(降低条件(a)的成立比例),使任务 2 的学习取得实质性进展,最终实现多任务协同优化。