深度解析图像处理核心概念:饱和度、色度与对比度
文章目录
- 深度解析图像处理核心概念:饱和度、色度与对比度
-
- [1. 饱和度 (Saturation)](#1. 饱和度 (Saturation))
-
- [1.1 概念深度解析:什么是"颜色的纯度"?](#1.1 概念深度解析:什么是“颜色的纯度”?)
- [1.2 技术原理与数学模型](#1.2 技术原理与数学模型)
- [1.3 应用场景与效果对比](#1.3 应用场景与效果对比)
- [1.4 代码实战 (Python/OpenCV)](#1.4 代码实战 (Python/OpenCV))
- [2. 色度 (Chroma)](#2. 色度 (Chroma))
-
- [2.1 概念深度解析:色度与饱和度有何不同?](#2.1 概念深度解析:色度与饱和度有何不同?)
- [2.2 CIE 1931 色度图解析](#2.2 CIE 1931 色度图解析)
- [2.3 量化方法:色差公式](#2.3 量化方法:色差公式)
- [2.4 代码实战 (C++)](#2.4 代码实战 (C++))
- [3. 对比度 (Contrast)](#3. 对比度 (Contrast))
-
- [3.1 概念深度解析:不仅仅是"黑白分明"](#3.1 概念深度解析:不仅仅是“黑白分明”)
- [3.2 测量指标:RMS对比度](#3.2 测量指标:RMS对比度)
- [3.3 局部对比度增强:CLAHE](#3.3 局部对比度增强:CLAHE)
- [3.4 代码实战 (MATLAB)](#3.4 代码实战 (MATLAB))
- [4. 参考文献](#4. 参考文献)
1. 饱和度 (Saturation)
1.1 概念深度解析:什么是"颜色的纯度"?
饱和度 (Saturation)描述的是色彩的纯度 或鲜艳程度。
- 直观理解:想象一滴纯红色的墨水(100%饱和度)。如果你往里面滴入一滴水(灰色/白色),红色就会变淡,变成了粉红或浅红,此时饱和度下降。如果滴入无限多的水,最终它会变成完全透明或灰色(0%饱和度)。
- 物理意义:在光谱中,单色光(如激光)具有最高的饱和度。当混入白光越多,光谱越宽,饱和度越低。
1.2 技术原理与数学模型
在 HSV (Hue, Saturation, Value) 色彩空间中,饱和度 S S S 的计算依赖于RGB通道中的最大值和最小值。
S = { 0 if max ( R , G , B ) = 0 max ( R , G , B ) − min ( R , G , B ) max ( R , G , B ) otherwise S = \begin{cases} 0 & \text{if } \max(R,G,B) = 0 \\ \frac{\max(R,G,B) - \min(R,G,B)}{\max(R,G,B)} & \text{otherwise} \end{cases} S={0max(R,G,B)max(R,G,B)−min(R,G,B)if max(R,G,B)=0otherwise
- 分子 max − min \max - \min max−min 代表了色彩分量之间的差异。差异越大,色彩越纯。
- 如果 R = G = B R=G=B R=G=B,则 max − min = 0 \max - \min = 0 max−min=0,此时 S = 0 S=0 S=0,即为灰度。
1.3 应用场景与效果对比
- 应用 :
- 人像美化: 适当降低饱和度可以使肤色更白皙柔和。
- 风景增强: 提高饱和度(尤其是蓝色和绿色通道)可以让天空更蓝、草地更翠。

图1-1: 饱和度调整效果对比 (左: -30%, 中: 原图, 右: +50%)
1.4 代码实战 (Python/OpenCV)
python
import cv2
import numpy as np
def adjust_saturation(image, saturation_scale=1.0):
# 1. 转换到 HSV 空间
hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV).astype("float32")
# 2. 提取 S 通道并缩放
(h, s, v) = cv2.split(hsv)
s = s * saturation_scale
# 3. 截断范围 [0, 255]
s = np.clip(s, 0, 255)
# 4. 合并并转回 BGR
hsv = cv2.merge([h, s, v])
return cv2.cvtColor(hsv.astype("uint8"), cv2.COLOR_HSV2BGR)
# 使用示例
img = cv2.imread("test.jpg")
img_boost = adjust_saturation(img, 1.5) # 增加50%2. 色度 (Chroma)
2.1 概念深度解析:色度与饱和度有何不同?
这是一个极易混淆的概念。
- 饱和度 (Saturation) : 是相对于亮度而言的色彩强度。同样的红色,在暗处和亮处,如果按照HSV模型,其饱和度可能相同。
- 色度 (Chroma) : 是相对于白色的色彩距离。它描述的是颜色偏离相同亮度灰色的程度。
在 CIE Lab 或 LCh 空间中,色度 C ∗ C^* C∗ 定义为:
C ∗ = ( a ∗ ) 2 + ( b ∗ ) 2 C^* = \sqrt{(a^*)^2 + (b^*)^2} C∗=(a∗)2+(b∗)2
它表示在色平面上距离原点(中性灰)的欧几里得距离。
2.2 CIE 1931 色度图解析
CIE 1931 xy色度图是色彩科学的基石。
- 马蹄形边界: 代表人眼能感知的可见光谱轨迹(单色光)。
- 中心点 (E点): 等能白点,坐标 (0.33, 0.33),代表纯白光。
- 距离中心的距离 : 代表色度。越靠近边缘,色度越高。
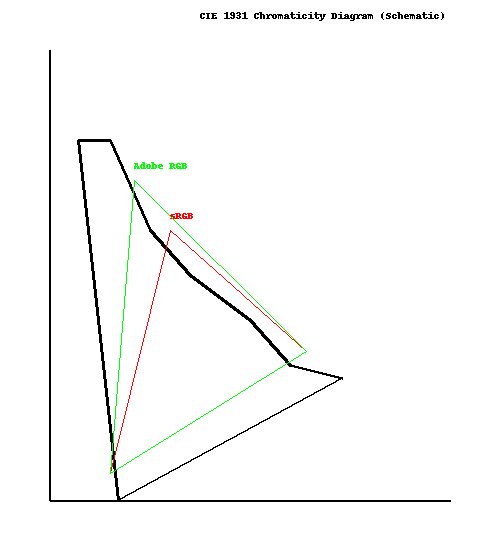
图2-1: CIE 1931 色度图与sRGB/AdobeRGB色域范围
2.3 量化方法:色差公式
工业界常用 Δ E \Delta E ΔE 来衡量两种颜色的感知差异。最新的 CIEDE2000 公式极其复杂,但最基础的 Δ E a b ∗ \Delta E^*_{ab} ΔEab∗ 定义为:
Δ E a b ∗ = ( Δ L ∗ ) 2 + ( Δ a ∗ ) 2 + ( Δ b ∗ ) 2 \Delta E^*_{ab} = \sqrt{(\Delta L^*)^2 + (\Delta a^*)^2 + (\Delta b^*)^2} ΔEab∗=(ΔL∗)2+(Δa∗)2+(Δb∗)2
- Δ E < 1.0 \Delta E < 1.0 ΔE<1.0: 人眼几乎无法分辨。
- Δ E > 3.0 \Delta E > 3.0 ΔE>3.0: 明显可见的色差。
2.4 代码实战 (C++)
cpp
#include <cmath>
#include <iostream>
struct LabColor {
double L, a, b;
};
// 计算简单的 Delta E (CIE76)
double calculate_delta_e(const LabColor& c1, const LabColor& c2) {
double dL = c1.L - c2.L;
double da = c1.a - c2.a;
double db = c1.b - c2.b;
return std::sqrt(dL*dL + da*da + db*db);
}
int main() {
LabColor red = {53.24, 80.09, 67.20};
LabColor pink = {60.00, 60.00, 40.00};
double diff = calculate_delta_e(red, pink);
std::cout << "Color Difference (Delta E): " << diff << std::endl;
return 0;
}3. 对比度 (Contrast)
3.1 概念深度解析:不仅仅是"黑白分明"
对比度指的是图像中亮部与暗部之间的差异程度。
- 高对比度: 黑色更黑,白色更白,图像通透,细节清晰,但可能丢失中间调。
- 低对比度: 图像发灰,像是蒙了一层雾,直方图集中在中间区域。
3.2 测量指标:RMS对比度
对于图像 I ( x , y ) I(x,y) I(x,y),均方根 (RMS) 对比度定义为像素强度的标准差:
C r m s = 1 M N ∑ i = 0 M − 1 ∑ j = 0 N − 1 ( I i j − I ˉ ) 2 C_{rms} = \sqrt{\frac{1}{MN} \sum_{i=0}^{M-1} \sum_{j=0}^{N-1} (I_{ij} - \bar{I})^2} Crms=MN1i=0∑M−1j=0∑N−1(Iij−Iˉ)2
3.3 局部对比度增强:CLAHE
CLAHE (Contrast Limited Adaptive Histogram Equalization) 是医疗影像处理的神器。
- 原理 :
- 将图像切分为小块(Tiles)。
- 对每个小块进行直方图均衡化。
- 限制对比度 (Contrast Limiting): 截断直方图中超过阈值的频数,将其均匀分配到其他灰度级,防止噪声放大。
- 双线性插值消除块边界。
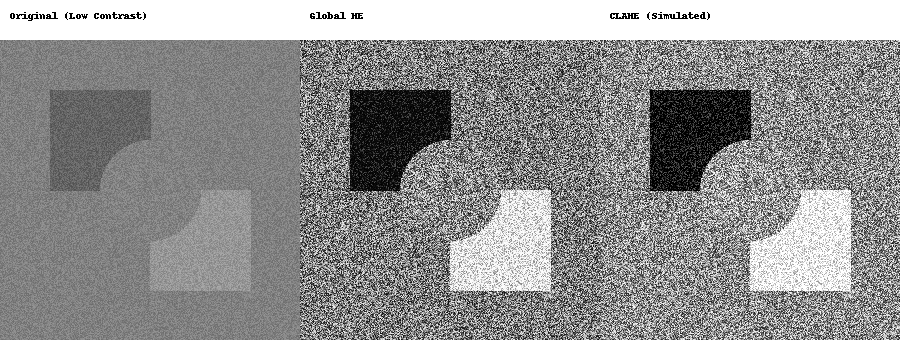
图3-1: 原图(低对比) vs 全局均衡化(HE) vs 自适应均衡化(CLAHE)
3.4 代码实战 (MATLAB)
matlab
% 读取图像 (假设为 DICOM 医疗影像)
img = dicomread('lung_ct.dcm');
% 归一化到 [0, 1]
img = double(img);
img = (img - min(img(:))) / (max(img(:)) - min(img(:)));
% 1. 全局直方图均衡化
img_he = histeq(img);
% 2. CLAHE (自适应)
% ClipLimit: 对比度限制阈值
img_clahe = adapthisteq(img, 'ClipLimit', 0.02, 'Distribution', 'rayleigh');
% 显示结果
figure;
subplot(1,3,1); imshow(img); title('Original');
subplot(1,3,2); imshow(img_he); title('Global HE');
subplot(1,3,3); imshow(img_clahe); title('CLAHE');4. 参考文献
- R. C. Gonzalez and R. E. Woods, "Digital Image Processing," 4th Edition.
- Sharma, G., et al. "The CIEDE2000 color-difference formula." IEEE Transactions on Image Processing, 2005.
- Pizer, S. M., et al. "Adaptive histogram equalization and its variations." Computer vision, graphics, and image processing, 1987.