typora-copy-images-to: upload
效果挺牛的,而且不需要给缺陷打标签,只训练正样本,站在巨人的肩膀上学习
环境部署
新建python 3.10环境conda create -n anomalib python=3.10
安装pip install anomalib==2.2.0 -i https://pypi.tuna.tsinghua.edu.cn/simple
pip install torch==2.1.0 torchvision==0.16.0 torchaudio==2.1.0 --index-url https://download.pytorch.org/whl/cu118
pip install numpy==1.24.4 -i https://pypi.tuna.tsinghua.edu.cn/simple
训练参数设置
数据集组织方式,good里边放合格的产品,defect里边放不合格的图片,模型只会拿合格的图片进行训练
python
from anomalib.engine import Engine
from anomalib.data import Folder
from pathlib import Path
from anomalib.models import Stfpm,Patchcore
from anomalib.deploy import ExportType
from torchvision import transforms
if __name__ == "__main__":
#打印可用模型
# print(dir(M))
train_transform = transforms.Compose([
transforms.Resize((256, 256)),
# transforms.ColorJitter(brightness=0.2, contrast=0.2, saturation=0.2, hue=0.1),
# transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]),
])
model = Patchcore(
backbone="wide_resnet50_2",
coreset_sampling_ratio=0.1,
num_neighbors=5
)
datamodule = Folder(
name="Tire",
root=Path("./dataset/Tire"),
normal_dir="good", # Subfolder containing normal images
abnormal_dir="defect", # Subfolder containing anomalous images
train_batch_size=8, #可调整
eval_batch_size=8, # 可调整
# num_workers=1,
train_augmentations=train_transform,
)
datamodule.setup()
# 4. Create the training engine
engine = Engine(
max_epochs=50, # Override default trainer settings
)
engine.fit(datamodule=datamodule, model=model) # 训练(只用 train/good)
# test_results = engine.test(datamodule=datamodule, model=model)
#转换模型
engine.export(
model=model,
export_type=ExportType.ONNX,
# ckpt_path="./PatchCore_0.05_5.ckpt",
export_root="./"
)模型导出onnx
安装pip install onnx==1.17.0 onnxruntime==1.18.0 -i https://pypi.tuna.tsinghua.edu.cn/simple
# 转换模型
engine.export(
model=model,
export_type=ExportType.ONNX,
)检测效果
python
# 1. Import required modules
from anomalib.data import PredictDataset
from anomalib.engine import Engine
from anomalib.models import Stfpm,Patchcore
from torchvision import transforms
model = Patchcore(
backbone="wide_resnet50_2",
coreset_sampling_ratio=0.05,
num_neighbors=5
)
engine = Engine()
train_transform = transforms.Compose([
transforms.Resize((256, 256)),
# transforms.ColorJitter(brightness=0.2, contrast=0.2, saturation=0.2, hue=0.1),
# transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]),
])
# 3. Prepare test data
# You can use a single image or a folder of images
dataset = PredictDataset(
path="./dataset/Tire/good-1",
transform=train_transform,
)
# 4. Get predictions
predictions = engine.predict(
model=model,
dataset=dataset,
ckpt_path="./results/Patchcore/Tire/latest/weights/lightning/model.ckpt",
)
# 5. Access the results
norma,anomalous=0,0
if predictions is not None:
for prediction in predictions:
image_path = prediction.image_path
anomaly_map = prediction.anomaly_map # Pixel-level anomaly heatmap
pred_label = prediction.pred_label # Image-level label (0: normal, 1: anomalous)
pred_score = prediction.pred_score # Image-level anomaly score
pred_mask = prediction.pred_mask # Pixel-level binary mask
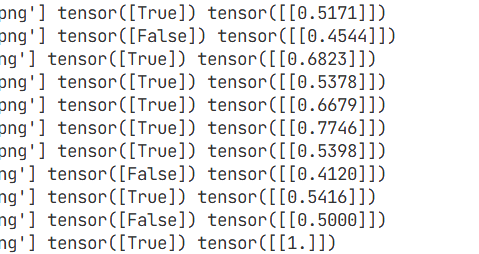
print(image_path,pred_label,pred_score)
if(pred_label==0):
norma+=1
else:
anomalous+=1
print(f"norma:{norma},anomalous:{anomalous}")置信度大于0.5的被视为异常类
Patchcore
自己测试效果比STFPM好
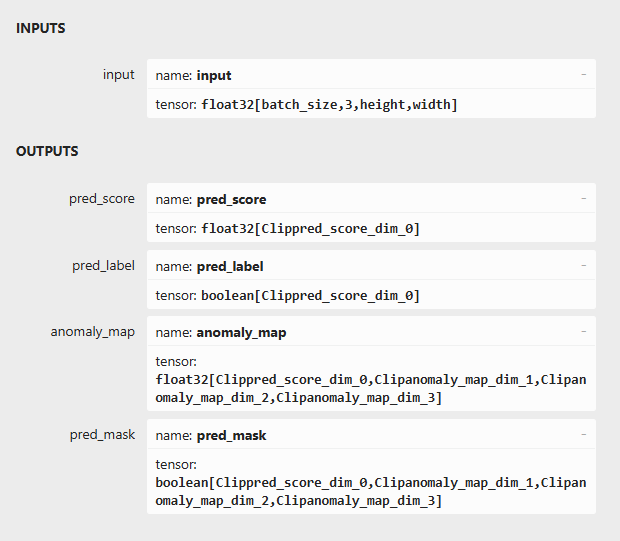
onnx模型的输入输出,那看来可以直接用
onnx
python 验证onnx,效果基本一致,同时可视化结果也可以展示
python
import onnxruntime
import numpy as np
import cv2
from PIL import Image
from pathlib import Path
import os
# ===================== 配置 =====================
MODEL_PATH = "./weights/onnx/PatchCore.onnx"
IMAGE_DIR = "./dataset/Tire/defect"
OUTPUT_DIR = "./results/onnx_vis"
INPUT_SIZE = (256, 256)
THRESHOLD = 0.5
os.makedirs(OUTPUT_DIR, exist_ok=True)
# ===================== 工具函数 =====================
def preprocess_image(img_path):
img = Image.open(img_path).convert("RGB")
img_resized = img.resize(INPUT_SIZE, Image.BILINEAR)
img_np = np.array(img_resized).astype(np.float32) / 255.0
img_chw = img_np.transpose(2, 0, 1)
img_chw = np.expand_dims(img_chw, axis=0)
return img_chw, np.array(img) # 返回原图(RGB)用于可视化
def visualize_pred_mask(orig_img, anomaly_map, save_path_overlay):
"""
orig_img: HWC, RGB, uint8
anomaly_map: HxW, float32 (已归一化到 0-1)
"""
# 1. 生成热力图
# 映射到 0-255 并转为 uint8
anomaly_map_uint8 = (anomaly_map * 255).astype(np.uint8)
# 应用伪彩色 (蓝=冷, 红=热)
heatmap = cv2.applyColorMap(anomaly_map_uint8, cv2.COLORMAP_JET)
# 2. 调整尺寸对齐
h, w = orig_img.shape[:2]
if heatmap.shape[:2] != (h, w):
heatmap = cv2.resize(heatmap, (w, h))
# 3. 叠加显示
orig_bgr = cv2.cvtColor(orig_img, cv2.COLOR_RGB2BGR)
overlay = cv2.addWeighted(orig_bgr, 0.6, heatmap, 0.4, 0)
cv2.imwrite(save_path_overlay, overlay)
# ===================== 创建 ONNX Runtime 会话 =====================
session = onnxruntime.InferenceSession(MODEL_PATH, providers=['CPUExecutionProvider'])
input_name = session.get_inputs()[0].name
# 自动获取输出名称,防止索引错误
output_names = [node.name for node in session.get_outputs()]
print(f"模型输出列表: {output_names}")
# 预期应该是 ['pred_score', 'pred_label', 'anomaly_map', 'pred_mask']
# ===================== 遍历图片推理 =====================
for img_path in Path(IMAGE_DIR).glob("*.*"):
if img_path.suffix.lower() not in ['.jpg', '.png', '.jpeg', '.bmp']:
continue
img_input, orig_img_vis = preprocess_image(img_path)
# === 关键修改 1: 明确指定要获取的输出变量名 ===
# 我们同时获取 'anomaly_map' 和 'pred_score'
# 注意:session.run 第一个参数是列表,指定我们要拿回哪些结果
outputs = session.run(
["anomaly_map", "pred_score"],
{input_name: img_input}
)
# 根据请求的顺序获取结果
raw_anomaly_map = outputs[0] # Shape: (1, 1, 256, 256) 或 (1, 256, 256)
pred_score = outputs[1] # Shape: (1,)
# === 数据后处理 ===
# 1. 去掉多余的维度 (Batch, Channel) -> 变成 (256, 256)
anomaly_map = raw_anomaly_map.squeeze()
# 2. 拿到标量分数
score_val = float(pred_score[0]) if isinstance(pred_score, (list, np.ndarray)) else float(pred_score)
pred_label = 1 if score_val > THRESHOLD else 0
# === 关键修改 2: 归一化 (Min-Max Normalization) ===
# PatchCore 输出的是距离,不是概率,必须归一化才能画热力图
min_val, max_val = anomaly_map.min(), anomaly_map.max()
# 简单的单图自适应归一化 (将当前图最蓝的地方定为0,最红定为1)
if max_val - min_val > 0:
anomaly_map_norm = (anomaly_map - min_val) / (max_val - min_val)
else:
anomaly_map_norm = anomaly_map
print(f"{img_path.name}: Label={pred_label}, Score={score_val:.4f}")
# === 可视化 ===
save_overlay = os.path.join(OUTPUT_DIR, img_path.stem + "_vis.png")
visualize_pred_mask(orig_img_vis, anomaly_map_norm, save_overlay)
print("处理完成!")C++ onnxRuntime部署
版本1.18.0
参照onnx输出,拿到对应的值即可,应用可视化
c
#pragma once
#include <opencv2/opencv.hpp>
// ONNX Runtime C++ API
#define ORT_DISABLE_FP16
#include <onnxruntime_cxx_api.h> // C++ 封装接口
#include <chrono> // 用于高精度计时
#include <iostream>
#include <QObject>
#include <vector>
class tireDefectDet : public QObject
{
Q_OBJECT // Qt 宏,必须写在类里开头
public:
//外部访问接口----获取单例
static tireDefectDet* getInstance();
//禁止拷贝和赋值
tireDefectDet(const tireDefectDet&) = delete;
tireDefectDet& operator = (const tireDefectDet&) = delete;
//运行流程
bool runDet(const std::string& imgPath);
private:
explicit tireDefectDet(QObject *parent = nullptr);
static tireDefectDet* m_pInstance;
// ====== ONNX Runtime 基础对象(全局只能一个 Env)======
Ort::Env env;
Ort::SessionOptions sessionOptions;
Ort::Session m_detSession;
std::string m_strInputName;
std::string m_strPredScore;
std::string m_strPredLabel;
std::string m_strAnomalyMap;
std::string m_strPredMask;
};cpp
c
#include "tireDefectDet.h"
// 与 Python 配置保持一致
const int INPUT_W = 256;
const int INPUT_H = 256;
// 定义常用的 ImageNet 均值和方差
const float mean_vals[3] = { 0.485f, 0.456f, 0.406f };
const float std_vals[3] = { 0.229f, 0.224f, 0.225f };
//类外实例化
tireDefectDet* tireDefectDet::m_pInstance = nullptr;
/***********************************************
* @功能描述 : 返回单例指针
* @参数 : none
* @返回值 : none
***********************************************/
tireDefectDet* tireDefectDet::getInstance()
{
if (m_pInstance == nullptr)
{
m_pInstance = new tireDefectDet();
}
return m_pInstance;
}
/***********************************************
* @功能描述 : 初始化onnx,加载模型
* @参数 : none
* @返回值 : none
***********************************************/
tireDefectDet::tireDefectDet(QObject * parent)
:QObject(parent),
env(ORT_LOGGING_LEVEL_WARNING, "TireDefectDet"),
sessionOptions(),
m_detSession(nullptr) // 先占位,稍后再真正构造
{
//设置线程优化数
sessionOptions.SetIntraOpNumThreads(4);
//设置图像优化等级
sessionOptions.SetGraphOptimizationLevel(GraphOptimizationLevel::ORT_ENABLE_BASIC);
//加载GPU
try
{
OrtSessionOptionsAppendExecutionProvider_CUDA(sessionOptions, 0);
}
catch (...)
{
std::cout << "⚠️ CUDA not available, fallback to CPU" << std::endl;
}
//====加载模型====
m_detSession = Ort::Session(env, L"./model/PatchCore.onnx",sessionOptions);
Ort::AllocatorWithDefaultOptions allocator;
m_strInputName = m_detSession.GetInputNameAllocated(0, allocator).get();
m_strPredScore = m_detSession.GetOutputNameAllocated(0, allocator).get(); // pred_score
m_strPredLabel = m_detSession.GetOutputNameAllocated(1, allocator).get(); // pred_label
m_strAnomalyMap = m_detSession.GetOutputNameAllocated(2, allocator).get(); // anomaly map
m_strPredMask = m_detSession.GetOutputNameAllocated(3, allocator).get(); // pred_mask
}
/***********************************************
* @功能描述 : 运行监测流程
* @参数 : bool 判断是否合格
* @返回值 : none
***********************************************/
bool tireDefectDet::runDet(const std::string & imgPath)
{
const char* inputNames[] = { m_strInputName.c_str() };
std::vector<const char*> outputNames = {
m_strPredScore.c_str(), // pred_score
m_strPredLabel.c_str(), // pred_label
m_strAnomalyMap.c_str(),// anomaly map
m_strPredMask.c_str() // pred_mask
};
cv::Mat image = cv::imread(imgPath); //BGR格式
if (image.empty()) {
std::cerr << "Error: Image not found." << std::endl;
return false;
}
//resize
cv::Mat resizeImg;
cv::resize(image, resizeImg, cv::Size(INPUT_W,INPUT_H));
//BGR 转 RGB
cv::cvtColor(resizeImg, resizeImg, cv::COLOR_BGR2RGB);
// 归一化(0 - 1) & HWC->CHW
std::vector<float> inputTensorValues;
inputTensorValues.reserve(INPUT_H * INPUT_W * 3);
// 遍历顺序:Channel->Height->Width(CHW) OpenCV 默认是 BGR,分别提取 B, G, R 通道
for (int c = 0; c < 3; c++)
{
for (int h = 0; h < INPUT_H; h++)
{
for (int w = 0; w < INPUT_W; w++)
{
// at<cv::Vec3b> 返回的是 BGR
float pixel = resizeImg.at<cv::Vec3b>(h, w)[c];
//inputTensorValues.push_back(pixel/255.0f);
inputTensorValues.push_back(pixel);
}
}
}
//构造输入tensor
std::array<int64_t, 4> inputShape = { 1,3,INPUT_H,INPUT_W };
Ort::MemoryInfo memoryInfo = Ort::MemoryInfo::CreateCpu(OrtArenaAllocator, OrtMemTypeDefault);
Ort::Value inputTensor = Ort::Value::CreateTensor<float>(
memoryInfo,
inputTensorValues.data(),
inputTensorValues.size(),
inputShape.data(),
inputShape.size()
);
//模型推理,获取三个输出
auto outputTensor = m_detSession.Run(
Ort::RunOptions{nullptr},
inputNames,
&inputTensor,
1,
outputNames.data(),
outputNames.size()
);
// ==== 解析输出 ====
// 1.得分 不合格率 [1]
float predScore = outputTensor[0].GetTensorMutableData<float>()[0];
std::cout << predScore << " ";
//2.标签是否合格 0合格 ,1 不合格 [1]
int predLabel = (int)outputTensor[1].GetTensorMutableData<int64_t>()[0];
std::cout << predLabel << " " << std::endl;
//3. anomaly map [1,1,256,256]
float* anomalyMapData = outputTensor[2].GetTensorMutableData<float>();
std::vector<int64_t> anomalyMapShape = outputTensor[2].GetTensorTypeAndShapeInfo().GetShape();
//for (auto s : anomalyMapShape) std::cout << s << " "; //打印维度
int h = anomalyMapShape[2];
int w = anomalyMapShape[3];
// 转成 Mat
cv::Mat anomalyMap(h, w, CV_32FC1, anomalyMapData);
// 归一化 0~255
cv::Mat normMap;
cv::normalize(anomalyMap, normMap, 0, 255, cv::NORM_MINMAX);
normMap.convertTo(normMap, CV_8UC1);
// 应用伪彩色
cv::Mat heatmap;
cv::applyColorMap(normMap, heatmap, cv::COLORMAP_JET);
// ============== 叠加热力图到原图 ================
// 注意:image 是 runDet 开头读取的原始 BGR 图片
cv::Mat overlay;
// 1. 调整 heatmap 尺寸到原图大小
cv::Mat resizedHeatmap;
// 原始图片 image 是 BGR 格式
cv::resize(heatmap, resizedHeatmap, image.size());
// 2. 加权叠加
// 权重:原图 0.6, 热力图 0.4。可以根据需要调整。
cv::addWeighted(image, 0.6, resizedHeatmap, 0.4, 0, overlay);
// 显示或保存
cv::imshow("Overlay", overlay); // 显示叠加图
cv::imwrite("overlay.jpg", overlay); // 保存叠加图
return false;
}