DreamGym:通过经验合成实现代理学习的可扩展化
今天,我们来聊聊一篇刚刚发布的论文:《Scaling Agent Learning via Experience Synthesis》(通过经验合成实现代理学习的扩展)。这篇论文由Meta Superintelligence Labs和FAIR团队主导,发表于2025年11月7日(arXiv:2511.03773v2)。如果你已经熟悉PPO(Proximal Policy Optimization)和GRPO(Group Relative Policy Optimization)等RL算法,这篇论文会特别对你的胃口。它提出了一种名为DreamGym的统一框架,旨在解决LLM代理在RL训练中的痛点:数据收集成本高、任务多样性不足、奖励信号不稳定,以及基础设施的复杂性。通过合成经验,DreamGym让代理训练变得高效、可扩展,甚至在sim-to-real转移中表现出色。
论文的核心洞见是:代理RL训练并不需要完美复制真实环境,而是需要多样、信息丰富且因果 grounded 的交互数据。DreamGym正是基于这个想法,构建了一个基于推理的经验模型,来生成合成 rollout,同时结合经验重放缓冲区和课程学习机制。接下来,我一步步拆解论文的内容,包括问题背景、方法细节和实验结果。走起!
RL在LLM代理中的瓶颈:为什么传统范式不work?
回想一下,LLM代理已经在web导航(Zhou et al., 2023)、具身控制(Shridhar et al.)和多轮工具使用(Yao et al., 2024)中大放异彩。但当我们转向"经验时代"(Silver and Sutton, 2025),用RL让代理通过自交互 bootstrapping 自我提升时,问题就来了。
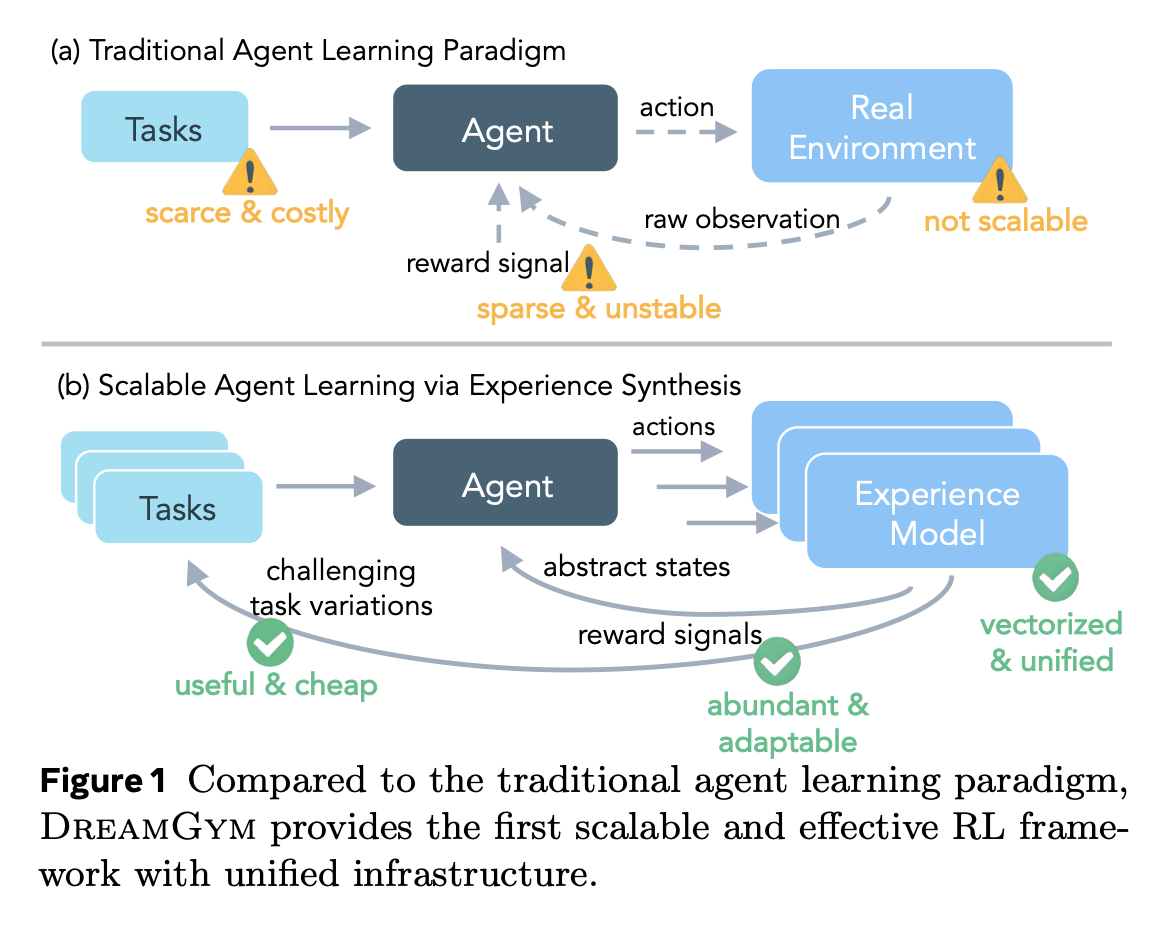
传统代理学习范式如图1(a)所示:代理与真实环境交互,产生 rollout,但面临四大挑战:
- 高成本 rollout:真实环境交互序列长、计算密集、奖励稀疏(Wei et al., 2025; Jiang et al., 2025)。
- 任务多样性不足:现有环境任务静态,扩展需人工验证(Xue et al., 2025),不利于目标条件RL(Eysenbach et al., 2018)。
- 奖励不稳定:动态环境(如web页面)产生噪声或虚假反馈(Deng et al., 2023),加上安全风险(如不可逆操作)。
- 基础设施复杂:依赖Docker或VM(Jimenez et al.; Xie et al., 2024b),大批量采样工程密集。
这些问题让RL在LLM代理上的实际应用举步维艰。论文提出DreamGym(如图1(b)),一个统一的合成经验框架,抽象环境动态到文本空间,生成廉价、多样且稳定的数据,支持在线RL训练。
预备知识:MDP与PPO/GRPO回顾
论文将代理学习形式化为MDP:M=(S,A,T,R,γ,ρ0)M = (S, A, T, R, \gamma, \rho_0)M=(S,A,T,R,γ,ρ0),其中SSS是状态空间(e.g., 网页内容),AAA是动作空间(e.g., 点击UI),T:S×A→Δ(S)T: S \times A \to \Delta(S)T:S×A→Δ(S)是转移函数,R:S×A→RR: S \times A \to \mathbb{R}R:S×A→R是奖励,γ∈0,1\gamma \in 0,1γ∈0,1是折扣因子,ρ0\rho_0ρ0包含初始任务τ0\tau_0τ0。
目标是优化策略πθ:S→Δ(A)\pi_\theta: S \to \Delta(A)πθ:S→Δ(A),最大化期望累积奖励:
∇J(θ)=E(st,at)∼πθ∇logπθ(at∣st)⋅A\^(st,at), \nabla J(\theta) = \mathbb{E}{(s_t,a_t) \sim \pi\theta} \left \\nabla \\log \\pi_\\theta(a_t \| s_t) \\cdot \\hat{A}(s_t, a_t) \\right, ∇J(θ)=E(st,at)∼πθ∇logπθ(at∣st)⋅A\^(st,at),
其中A^(st,at)\hat{A}(s_t, a_t)A^(st,at)是优势函数。
PPO(Schulman et al., 2017)用GAE计算优势:
A^tPPO=∑l=0K−1(γλ)lrt+l+γV(st+l+1)−V(st+l), \hat{A}^{\text{PPO}}t = \sum{l=0}^{K-1} (\gamma \lambda)^l r_{t+l} + \\gamma V(s_{t+l+1}) - V(s_{t+l}), A^tPPO=l=0∑K−1(γλ)lrt+l+γV(st+l+1)−V(st+l),
V(⋅)V(\cdot)V(⋅)由LLM近似,λ\lambdaλ平衡偏差-方差。
GRPO(Shao et al., 2024)扩展PPO,丢弃价值函数,用组内归一化奖励:
A^tGRPO=rt−Ei∈Gristdi∈Gri, \hat{A}^{\text{GRPO}}t = \frac{r_t - \mathbb{E}{i \in G} r_i}{\text{std}_{i \in G} r_i}, A^tGRPO=stdi∈Grirt−Ei∈Gri,
其中GGG是同一任务的响应组。这更易扩展,但样本效率可能稍低。DreamGym与这些算法正交,焦点是合成高质量经验。
DreamGym的核心:三个关键组件
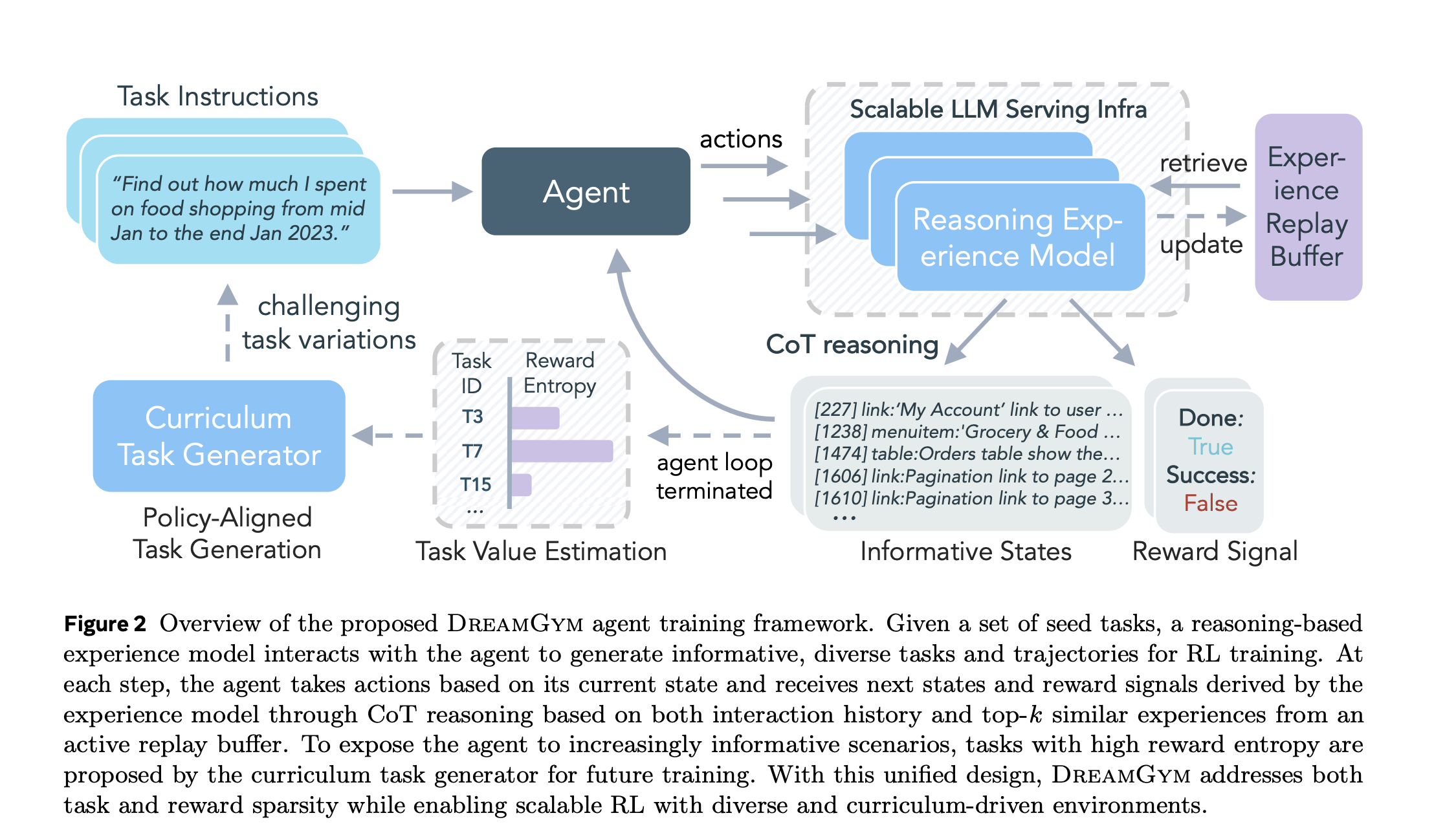
DreamGym围绕三个组件构建(如图2):(1)推理经验模型MexpM_{\text{exp}}Mexp,(2)经验重放缓冲区,(3)课程任务生成器。它们协同生成多样 rollout,支持RL训练。
1. 推理经验模型:抽象文本空间中的高效合成
传统世界模型(如Dreamer, Hafner et al., 2020)在像素空间昂贵。DreamGym用LLM-based MexpM_{\text{exp}}Mexp在抽象文本状态SSS中工作,丢弃无关细节(e.g., HTML标签,只保留元素列表)。这让训练高效,只需少量离线轨迹(如WebArena基准)。
推理过程 :给定当前状态-动作对、历史{(si,ai)}i=0t\{(s_i, a_i)\}{i=0}^t{(si,ai)}i=0t、任务τ\tauτ和top-k相似演示{dj}j=1k\{d_j\}{j=1}^k{dj}j=1k(从缓冲区检索,相似度cos(ϕ(st,at),ϕ(si,ai))\cos(\phi(s_t, a_t), \phi(s_i, a_i))cos(ϕ(st,at),ϕ(si,ai))),模型用CoT生成下一状态和奖励:
(st+1,rt+1)=Mexp(Rt∣{(si,ai)}i=0t,{dj}j=1k,τ), (s_{t+1}, r_{t+1}) = M_{\text{exp}} \left( R_t \mid \{(s_i, a_i)\}{i=0}^t, \{d_j\}{j=1}^k, \tau \right), (st+1,rt+1)=Mexp(Rt∣{(si,ai)}i=0t,{dj}j=1k,τ),
RtR_tRt是显式推理轨迹。奖励基于结局:成功 r=1 (最终步),否则(最终步),否则(最终步),否则 r=0 (Feng et al., 2025)。这确保因果一致,避免幻觉。
训练 :用SFT蒸馏离线数据D={(st,at,st+1,rt+1)}D = \{(s_t, a_t, s_{t+1}, r_{t+1})\}D={(st,at,st+1,rt+1)},每个转移标注CoT Rt∗R_t^*Rt∗:
LSFT=E(st,at,st+1,Rt∗)∼D−logPθ(Rt∗∣st,at,Ht,Dk)−logPθ(st+1∣st,at,Rt∗,Ht,Dk), \mathcal{L}{\text{SFT}} = \mathbb{E}{(s_t,a_t,s_{t+1},R_t^*) \sim D} \left -\\log P_\\theta(R_t\^\* \| s_t, a_t, H_t, D_k) - \\log P_\\theta(s_{t+1} \| s_t, a_t, R_t\^\*, H_t, D_k) \\right, LSFT=E(st,at,st+1,Rt∗)∼D−logPθ(Rt∗∣st,at,Ht,Dk)−logPθ(st+1∣st,at,Rt∗,Ht,Dk),
HtH_tHt是历史,DkD_kDk是检索演示。这让模型不仅模仿专家,还学会泛化推理。
2. 经验重放缓冲区:离线+在线共进化
缓冲区从离线真实数据初始化,存储轨迹。交互中检索相似轨迹指导MexpM_{\text{exp}}Mexp,减少噪声。新合成轨迹在线更新缓冲区,与代理策略共进化,确保数据对齐。
3. 课程任务生成器:奖励熵驱动的适应性
任务扩展成本高,DreamGym用MtaskM_{\text{task}}Mtask(共享MexpM_{\text{exp}}Mexp参数)从种子任务生成变体:
τt=Mtask({τit−1}i=1m). \tau_t = M_{\text{task}} \left( \{\tau_i^{t-1}\}_{i=1}^m \right). τt=Mtask({τit−1}i=1m).
种子选高价值任务:组奖励熵
Vτ=1n∑i=1n(ri−rˉ)2,rˉ=1n∑i=1nri, V_\tau = \frac{1}{n} \sum_{i=1}^n (r_i - \bar{r})^2, \quad \bar{r} = \frac{1}{n} \sum_{i=1}^n r_i, Vτ=n1i=1∑n(ri−rˉ)2,rˉ=n1i=1∑nri,
高熵表示任务可行但挑战(成功/失败平衡,Gao et al., 2025)。用超参λ\lambdaλ控制合成任务比例,避免分布偏移。
训练循环:从种子任务开始,代理-模型交互生成 rollout,用PPO/GRPO更新策略。然后生成新任务变体,循环至收敛。附录B.1证明了合成经验下的策略改进下界(信任域假设)。
实验亮点:30%+提升,sim-to-real神器
论文在多样环境和代理骨架上评估DreamGym。
- 非RL-ready任务(如WebArena):DreamGym是唯一可行RL方案,提升30%+ vs. 基线/SOTA。
- RL-ready但昂贵环境:纯合成交互匹配GRPO/PPO性能,无需外部交互。
- DreamGym-S2R (sim-to-real):先合成训练,再转移真实环境,提升40%+,仅用<10%真实数据。作为warm-start策略,完美!
这些结果证明DreamGym在任务/奖励稀疏中卓越,启用高效合成RL和泛化转移。
结语:DreamGym的潜力与启发
DreamGym不是简单模拟器,而是RL-ready的统一基础设施,解决LLM代理训练的 scalability 瓶颈。它与AgentSynth(Xie et al., 2025)或UI-Simulator(Wang et al., 2025b)不同,提供完整工具链:多样任务生成、一致 rollout 和丰富奖励。
如果你在搞代理RL,这框架值得一试!代码/细节见论文附录。欢迎评论你的想法------PPO vs. GRPO在合成数据上,谁更香?下期见~
(参考:arXiv:2511.03773v2,Meta团队,2025)
DreamGym中经验模型的核心公式详解
在上面,简要介绍了DreamGym框架的推理经验模型(Reasoning Experience Model, MexpM_{\text{exp}}Mexp),包括其推理过程和训练损失函数。这些公式是DreamGym的核心,体现了如何通过链式思考(Chain-of-Thought, CoT)在抽象文本空间中生成一致的合成经验,从而支持高效的RL训练。如果你熟悉PPO和GRPO的策略梯度优化(∇J(θ)=E∇logπθ(at∣st)⋅A\^(st,at)\nabla J(\theta) = \mathbb{E} \\nabla \\log \\pi_\\theta(a_t \| s_t) \\cdot \\hat{A}(s_t, a_t)∇J(θ)=E∇logπθ(at∣st)⋅A\^(st,at)),这些公式可以看作是上游数据生成机制:它们确保生成的(st+1,rt+1)(s_{t+1}, r_{t+1})(st+1,rt+1)对下游优势估计A^\hat{A}A^更稳定、信息丰富。下面,我一步步拆解这些公式,结合论文的上下文(从提供的PDF页面1-6),解释其数学含义、设计动机、计算细节,以及与RL训练的关联。解释会保持严谨,但易懂------假设你已知MDP基础(M=(S,A,T,R,γ,ρ0)M = (S, A, T, R, \gamma, \rho_0)M=(S,A,T,R,γ,ρ0))。
1. 推理过程公式:生成下一状态和奖励
论文的核心公式是经验模型的推理 rollout 生成 :
(st+1,rt+1)=Mexp(Rt∣{(si,ai)}i=0t,{dj}j=1k,τ), (s_{t+1}, r_{t+1}) = M_{\text{exp}} \left( R_t \mid \{(s_i, a_i)\}{i=0}^t, \{d_j\}{j=1}^k, \tau \right), (st+1,rt+1)=Mexp(Rt∣{(si,ai)}i=0t,{dj}j=1k,τ),
其中:
- 左侧输出 :(st+1,rt+1)(s_{t+1}, r_{t+1})(st+1,rt+1) 是代理在时间t+1t+1t+1的下一状态(抽象文本描述,如网页元素的精炼列表)和奖励信号。状态st+1∈Ss_{t+1} \in Sst+1∈S(抽象空间,e.g., "订单表显示了1月食品支出150"),奖励150"),奖励150"),奖励r_{t+1} \in {0, 1}$(二元结局奖励,详见下文)。
- 右侧条件输入 :
- {(si,ai)}i=0t\{(s_i, a_i)\}_{i=0}^t{(si,ai)}i=0t:交互历史轨迹(长度t+1t+1t+1),确保状态一致性(e.g., 避免突然"跳跃"到无关页面)。
- {dj}j=1k\{d_j\}_{j=1}^k{dj}j=1k:从经验重放缓冲区检索的top-kkk相似演示(kkk通常小,如5-10)。相似度用余弦距离cos(ϕ(st,at),ϕ(si,ai))\cos(\phi(s_t, a_t), \phi(s_i, a_i))cos(ϕ(st,at),ϕ(si,ai))计算,其中ϕ(⋅)\phi(\cdot)ϕ(⋅)是任意语义编码器(e.g., LLM嵌入)。这注入"记忆",减少幻觉(hallucination),类似于RAG(Retrieval-Augmented Generation)。
- τ\tauτ:当前任务指令(自然语言,e.g., "查询1月中食品支出"),条件化模型对动作的解释。
- RtR_tRt:显式CoT推理轨迹(文本链),由MexpM_{\text{exp}}Mexp先生成,用于指导输出。例如,RtR_tRt可能描述:"用户点击'我的账户'链接 → 加载订单页 → 提取食品类别数据 → 验证任务进度,未完成"。
设计动机 :传统RL rollout依赖真实环境T(st,at)→st+1T(s_t, a_t) \to s_{t+1}T(st,at)→st+1,但成本高且不稳定(稀疏奖励、噪声)。这里,MexpM_{\text{exp}}Mexp(LLM参数化)在抽象SSS中模拟TTT和RRR,通过CoT确保因果一致 (causal grounding):输出反映动作的真实后果,而非随机。论文强调,这不需要像素级真实(不像Dreamer的像素世界模型),只需"足够多样、信息丰富"的数据,就能为PPO/GRPO提供高质量轨迹ϵ={τ0∣s0,a0,... }\epsilon = \{\tau_0 | s_0, a_0, \dots \}ϵ={τ0∣s0,a0,...}。
计算细节:
- 步骤1 :输入历史+检索+τ\tauτ到MexpM_{\text{exp}}Mexp,生成RtR_tRt(自回归文本生成,e.g., Llama-3提示:"基于历史和演示,逐步推理动作ata_tat的影响")。
- 步骤2 :用RtR_tRt条件化生成(st+1,rt+1)(s_{t+1}, r_{t+1})(st+1,rt+1)。如果ata_tat无效(e.g., 点击不存在链接),RtR_tRt推导出失败状态st+1s_{t+1}st+1(e.g., "错误页")和rt+1=0r_{t+1}=0rt+1=0;反之,推进进度。
- 奖励设计 (论文4.1.1,引用Feng et al., 2025):结局导向(outcome-based),仅在最终步(done=True)成功时r=1r=1r=1,否则全程r=0r=0r=0。这简化稀疏奖励问题,与GRPO的组归一化A^tGRPO=(rt−μG)/σG\hat{A}^{\text{GRPO}}_t = (r_t - \mu_G)/\sigma_GA^tGRPO=(rt−μG)/σG兼容(组GGG内平衡成功/失败,提升熵)。
- 与RL关联 :生成的轨迹直接喂入PPO的GAE(A^tPPO=∑(γλ)lrt+l+γV(st+l+1)−V(st+l)\hat{A}^{\text{PPO}}_t = \sum (\gamma \lambda)^l r_{t+l} + \\gamma V(s_{t+l+1}) - V(s_{t+l})A^tPPO=∑(γλ)lrt+l+γV(st+l+1)−V(st+l))或GRPO,避免真实环境的噪声。实验显示,这匹配真实PPO性能,但零外部交互。
潜在局限 :CoT依赖LLM质量,若ϕ(⋅)\phi(\cdot)ϕ(⋅)编码弱,检索可能偏差;论文用小kkk和历史窗口缓解。
2. 奖励信号的二元设计:r=1r = 1r=1(成功,最终步)或r=0r = 0r=0(否则)
这不是独立公式,而是嵌入上式的约束(rt+1∈{0,1}r_{t+1} \in \{0,1\}rt+1∈{0,1},仅终端状态触发111)。动机 :LLM代理任务多为长序列(long-horizon),中间奖励稀疏易导致崩溃(credit assignment难)。二元设计聚焦"任务完成",简化A^\hat{A}A^计算,尤其GRPO(组内标准化奖励,无需V(⋅)V(\cdot)V(⋅))。
计算 :RtR_tRt评估任务τ\tauτ进度,若轨迹结束且τ\tauτ满足(e.g., 提取正确支出),r=1r=1r=1;否则000。这确保"因果一致,避免幻觉"------e.g., 模型不会随意给高奖励。
与RL关联 :在高熵任务(Vτ=1n∑(ri−rˉ)2>0V_\tau = \frac{1}{n} \sum (r_i - \bar{r})^2 > 0Vτ=n1∑(ri−rˉ)2>0)中,平衡成功/失败,促进探索(Eysenbach et al., 2018)。PPO用此累积A^\hat{A}A^,GRPO用组rˉ,σr\bar{r}, \sigma_rrˉ,σr归一化,提升稳定性。
3. 训练公式:SFT损失函数
经验模型MexpM_{\text{exp}}Mexp通过监督微调(SFT)从离线数据D={(st,at,st+1,rt+1)}D = \{(s_t, a_t, s_{t+1}, r_{t+1})\}D={(st,at,st+1,rt+1)}蒸馏知识:
LSFT=E(st,at,st+1,Rt∗)∼D−logPθ(Rt∗∣st,at,Ht,Dk)−logPθ(st+1∣st,at,Rt∗,Ht,Dk), \mathcal{L}{\text{SFT}} = \mathbb{E}{(s_t,a_t,s_{t+1},R_t^*) \sim D} \left -\\log P_\\theta(R_t\^\* \| s_t, a_t, H_t, D_k) - \\log P_\\theta(s_{t+1} \| s_t, a_t, R_t\^\*, H_t, D_k) \\right, LSFT=E(st,at,st+1,Rt∗)∼D−logPθ(Rt∗∣st,at,Ht,Dk)−logPθ(st+1∣st,at,Rt∗,Ht,Dk),
其中:
- 期望E∼D\mathbb{E} \sim DE∼D:从离线轨迹数据集采样(e.g., WebArena基准,小型公开数据,论文称"高度样本高效")。
- 每个转移标注 :用LLM(提示见附录C.1)为(st,at)→(st+1,rt+1)(s_t, a_t) \to (s_{t+1}, r_{t+1})(st,at)→(st+1,rt+1)生成 ground-truth CoT Rt∗R_t^*Rt∗(e.g., "动作点击订单 → 因任务τ\tauτ,状态更新为表提取 → 奖励0,因未终")。
- 联合损失 :两项负对数似然(cross-entropy):
- 第一项−logPθ(Rt∗∣st,at,Ht,Dk)-\log P_\theta(R_t^* | s_t, a_t, H_t, D_k)−logPθ(Rt∗∣st,at,Ht,Dk):生成忠实推理(faithful reasoning)。HtH_tHt是历史(类似上式),DkD_kDk是检索演示(训练时也用RAG模拟在线)。
- 第二项−logPθ(st+1∣st,at,Rt∗,Ht,Dk)-\log P_\theta(s_{t+1} | s_t, a_t, R_t^*, H_t, D_k)−logPθ(st+1∣st,at,Rt∗,Ht,Dk):条件于Rt∗R_t^*Rt∗预测下一状态,确保CoT指导输出一致。
- 参数θ\thetaθ :MexpM_{\text{exp}}Mexp的LLM权重(共享MtaskM_{\text{task}}Mtask)。
设计动机 :不像像素世界模型需海量数据,抽象SSS让训练只需少量DDD(e.g., 公共基准轨迹)。联合目标让模型不只模仿专家(imitation),还学会泛化推理 (generalize):Rt∗R_t^*Rt∗解释因果("为什么ata_tat导致st+1s_{t+1}st+1"),桥接离线到在线RL。
计算细节:
- 数据准备 :对DDD中每个转移,LLM标注Rt∗R_t^*Rt∗(一次性,成本低)。
- 优化 :标准SFT(e.g., AdamW),焦点是token-level交叉熵。PθP_\thetaPθ是自回归概率(LLM输出分布)。
- 效率 :论文4.1.2强调,只需"abundant offline trajectory datasets"如WebArena;在线时,缓冲区更新DDD,让MexpM_{\text{exp}}Mexp与代理πθ\pi_\thetaπθ共进化。
与RL关联 :训练好的MexpM_{\text{exp}}Mexp生成轨迹ϵ\epsilonϵ,喂入PPO/GRPO更新πθ\pi_\thetaπθ。这放大RL效果:合成数据多样(via 课程),稳定(CoT),信息丰富(检索),实验中sim-to-real提升40%+(用<10%真实数据)。
这些公式的整体作用与启发
- 统一流程 (图2):种子任务τ0\tau_0τ0 → 代理选ata_tat → MexpM_{\text{exp}}Mexp用上式生成(st+1,rt+1)(s_{t+1}, r_{t+1})(st+1,rt+1) → 更新缓冲 → 高熵任务变体(VτV_\tauVτ选)→ 循环RL。
- 理论支撑 :附录B.1证明合成经验下策略改进下界(trust-region假设下,E∇J≥ϵ\mathbb{E}\\nabla J \geq \epsilonE∇J≥ϵ)。
- 实践价值:对PPO/GRPO用户,这提供"廉价warm-start"------纯合成训练匹配真实性能,转移时少量finetune。
DreamGym中的课程任务生成(Curriculum-based Task Generation)详解
大家好!在上两篇关于《Scaling Agent Learning via Experience Synthesis》(通过经验合成实现代理学习的扩展)论文的讨论中,我们先介绍了整体框架,然后深挖了推理经验模型的公式。今天,我们聚焦论文的4.2节:基于课程的任务生成 (Curriculum-based Task Generation)。这个机制是DreamGym的亮点之一,它解决了RL训练中任务多样性不足的痛点:传统方法扩展任务需大量人工验证(Zhou et al., 2025),成本高且不适应动态代理策略。DreamGym通过经验模型MexpM_{\text{exp}}Mexp的变体MtaskM_{\text{task}}Mtask,自动生成适应性任务变体,实现在线课程学习(online curriculum learning),让代理逐步面对更具挑战性的问题,从而提升知识获取效率。
如果你熟悉PPO或GRPO,这部分特别实用:它确保生成的合成任务与下游优势估计A^\hat{A}A^对齐,提供高信息增益(information gain)的轨迹,避免训练崩溃(training collapse)。下面,我从动机、核心公式、选择机制、稳定性设计,到与RL的整合,一步步拆解。解释基于论文提供的抽象状态空间SSS和MDP形式化(M=(S,A,T,R,γ,ρ0)M = (S, A, T, R, \gamma, \rho_0)M=(S,A,T,R,γ,ρ0)),公式会用LaTeX格式呈现(单符号用',完整公式用`,完整公式用',完整公式用$)。
1. 动机:为什么需要课程任务生成?
RL代理(如LLM-based)需要多样、课程对齐的任务指令来获取知识(Zhou et al., 2025)。但现实中:
- 扩展成本高:验证新任务的可行性需人工努力(e.g., 检查web环境是否支持),尤其在目标域(如WebArena)中。
- 静态任务不足:现有环境任务有限,无法支持有效探索(Eysenbach et al., 2018)。
- 适应性差 :代理策略πθ\pi_\thetaπθ更新后,原任务可能太简单,导致信息增益低;或太难,导致失败率高,奖励稀疏。
DreamGym的创新:利用经验模型的合成多轮转移能力 (synthetic multi-turn transitions),从少量种子任务(seed tasks)生成变体,无需真实环境验证。这构建了一个自适应课程:代理能力提升时,任务难度同步递增,促进渐进学习(progressive learning)。结果?实验中,DreamGym在高熵任务上提升代理探索,sim-to-real转移性能+40%(仅用<10%真实数据)。
2. 核心公式:任务生成过程
任务生成由MtaskM_{\text{task}}Mtask(参数共享MexpM_{\text{exp}}Mexp,复用CoT推理能力)驱动,从上一迭代的mmm个种子任务{τit−1}i=1m\{\tau_i^{t-1}\}{i=1}^m{τit−1}i=1m产生新任务τt\tau_tτt:
τt=Mtask({τit−1}i=1m). \tau_t = M{\text{task}} \left( \{\tau_i^{t-1}\}_{i=1}^m \right). τt=Mtask({τit−1}i=1m).
- 输入 :{τit−1}i=1m\{\tau_i^{t-1}\}_{i=1}^m{τit−1}i=1m 是上一轮高价值种子(详见下节),自然语言描述(e.g., "查询1月中食品支出")。
- 输出 :τt\tau_tτt 是变体(e.g., "查询2月中食品支出,并比较增长率"),保持域内一致,但增加复杂度(如多步推理)。
- 共享参数 :MtaskM_{\text{task}}Mtask继承MexpM_{\text{exp}}Mexp的θ\thetaθ,利用CoT生成"渐进挑战"(progressively challenging variations)。这高效:无需额外训练,只需提示调整(e.g., "基于种子,生成更难变体")。
设计洞见 :种子选择基于双标准:
- 足够挑战当前πθ\pi_\thetaπθ:最大化信息增益(maximizing information gain),避免过易任务。
- 定义良好:过滤不现实/畸形任务(unrealistic or malformed),确保可合成。
这让生成过程自举(self-bootstrapping):从少量种子(e.g., 10-20个初始任务)扩展到数千变体,支持大规模RL。
3. 种子选择机制:组奖励熵(Group-based Reward Entropy)
为量化"高价值"种子,论文引入奖励熵作为价值度量 VτV_\tauVτ,捕捉任务的挑战性与可行性 。对于任务τ\tauτ,从nnn次 rollout(在组GGG内)获取结局奖励ri∈{0,1}r_i \in \{0,1\}ri∈{0,1}(二元:成功=1,否则=0),定义:
Vτ=1n∑i=1n(ri−rˉ)2,rˉ=1n∑i=1nri. V_\tau = \frac{1}{n} \sum_{i=1}^n (r_i - \bar{r})^2, \quad \bar{r} = \frac{1}{n} \sum_{i=1}^n r_i. Vτ=n1i=1∑n(ri−rˉ)2,rˉ=n1i=1∑nri.
- 数学含义 :VτV_\tauVτ 是奖励的样本方差 (sample variance),度量不确定性(entropy)。rˉ\bar{r}rˉ是组均值,(ri−rˉ)2(r_i - \bar{r})^2(ri−rˉ)2惩罚偏差。
- Vτ=0V_\tau = 0Vτ=0:全成功(太易,无学习价值)或全失败(不可行)。
- Vτ>0V_\tau > 0Vτ>0:混合成功/失败,表示可行但挑战(feasible yet challenging)。
- 最大熵 :Vτ≈0.25V_\tau \approx 0.25Vτ≈0.25(Bernoulli分布,p=0.5p=0.5p=0.5时方差最大),成功/失败平衡,提供最大信用分配增益(credit assignment gain)。
- 组GGG定义 :
- GRPO模式 :GGG直接是训练组(同一τ\tauτ的响应采样),兼容组相对优势A^tGRPO=(rt−Ei∈Gri)/stdi∈Gri\hat{A}^{\text{GRPO}}t = (r_t - \mathbb{E}{i \in G}r_i) / \text{std}_{i \in G}r_iA^tGRPO=(rt−Ei∈Gri)/stdi∈Gri。
- PPO模式 :先用语义嵌入器(semantic embedder,如BERT)聚类任务,每个簇形成GGG,再生成变体。确保组内相似,避免分布偏移。
- 与LLM学习一致 :高熵任务对应"中等难度"(intermediate difficulty),LLM从中获益最多(Gao et al., 2025)。e.g., 在WebArena,VτV_\tauVτ高的任务如"复杂查询+分页"比简单"点击登录"更有效。
计算细节:
- 采样nnn :小批量(e.g., 10-50),用当前πθ\pi_\thetaπθ在DreamGym中 rollout(零成本合成)。
- 阈值选择 :选Vτ>θV_\tau > \thetaVτ>θ(θ\thetaθ小正数)的任务作为种子,喂入MtaskM_{\text{task}}Mtask生成变体。
- 为什么熵?:非零方差信号代理看到"边界案例"(edge cases),提升泛化(generalization),一致于探索理论(Eysenbach et al., 2018)。
4. 稳定性设计:超参数λ\lambdaλ的角色
为防训练不稳(e.g., 过度偏向合成任务,导致原分布覆盖不足),引入λ∈0,1\lambda \in 0,1λ∈0,1:每迭代采样合成任务的比例上限λ\lambdaλ。
- 效果 :保留(1−λ)(1-\lambda)(1−λ)原任务覆盖,确保广度;λ\lambdaλ引导探索πθ\pi_\thetaπθ弱点(weakness regions),实现课程平衡(curriculum balance)。
- 调参建议 :论文隐含λ≈0.3−0.5\lambda \approx 0.3-0.5λ≈0.3−0.5(中等),实验中稳定收敛,避免PPO的偏差-方差问题(λ\lambdaλ在GAE中)。
5. 与RL训练的整合:训练循环中的作用
如图2和4.3节所述,课程生成嵌入合成环境训练循环:
- 初始化 :种子任务集{τ0}\{\tau_0\}{τ0}。
- 交互 :代理πθ\pi_\thetaπθ选at∈Aa_t \in Aat∈A,MexpM_{\text{exp}}Mexp生成(st+1,rt+1)(s_{t+1}, r_{t+1})(st+1,rt+1)(用CoT,公式4)。
- RL更新 :轨迹ϵ={τ0∣s0,a0,... }\epsilon = \{\tau_0 | s_0, a_0, \dots\}ϵ={τ0∣s0,a0,...}喂PPO/GRPO,优化θ\thetaθ(公式1-3)。
- 课程扩展 :计算VτV_\tauVτ选高熵种子 → MtaskM_{\text{task}}Mtask生成变体τt\tau_tτt → 更新任务集。
- 循环 :至收敛或预算尽。附录B.1证明:在信任域(trust-region)假设下,合成经验的策略改进下界E∇J≥ϵ>0\mathbb{E}\\nabla J \geq \epsilon > 0E∇J≥ϵ>0。
与PPO/GRPO协同:
- PPO:VτV_\tauVτ辅助GAE的A^tPPO\hat{A}^{\text{PPO}}tA^tPPO,高熵任务丰富V(st+l+1)V(s{t+l+1})V(st+l+1)估计。
- GRPO:直接用GGG的rˉ,σr\bar{r}, \sigma_rrˉ,σr,VτV_\tauVτ量化组变异,提升相对归一化。
实验证据:在WebArena(非RL-ready),课程生成让DreamGym+30% vs. SOTA;在RL-ready环境,匹配GRPO/PPO,但零真实交互。
6. 启发与局限
潜力 :这不是静态课程(如Teacher-Student),而是代理对齐的动态生成 (policy-aligned),适用于任意域(web、工具使用)。对开发者:从少量种子起步,λ\lambdaλ调稳定性。
局限 :依赖MtaskM_{\text{task}}Mtask质量(LLM幻觉可能生畸形τt\tau_tτt);nnn采样需平衡计算(小nnn方差不准)。未来可加人类反馈(RLHF)精炼种子。
总之,课程任务生成让DreamGym从"数据饥饿"转向"自适应供给",是RL scalability的关键。(参考arXiv:2511.03773v2,2025.11.10)
DreamGym: 整体训练框架伪代码
基于论文《Scaling Agent Learning via Experience Synthesis》(arXiv:2511.03773v2)的描述,我为你提供一个简化的伪代码实现,聚焦于DreamGym的核心组件:推理经验模型(Reasoning Experience Model, MexpM_{\exp}Mexp)、经验重放缓冲区(Experience Replay Buffer)、课程任务生成器(Curriculum Task Generator)和合成环境下的RL训练循环(使用PPO或GRPO作为示例)。伪代码采用Python-like风格,便于理解和扩展。
伪代码覆盖了论文4.3节的"合成环境策略训练"流程:从种子任务开始,交替生成rollout、RL更新和任务扩展。假设:
- 代理策略πθ\pi_\thetaπθ(e.g., LLM-based policy)。
- MexpM_{\exp}Mexp已通过SFT训练好(公式5)。
- 奖励为二元结局奖励(r∈{0,1}r \in \{0,1\}r∈{0,1})。
- 超参数:kkk(检索top-k)、nnn(熵采样次数)、λ\lambdaλ(合成任务比例)、mmm(种子任务数)、γ,λGAE\gamma, \lambda_{\text{GAE}}γ,λGAE(RL相关)。
1. 辅助函数:经验模型推理(公式4)
python
def experience_model_step(s_t, a_t, history, tau, replay_buffer, k):
# 检索top-k相似轨迹
D_k = replay_buffer.retrieve_top_k(s_t, a_t, k) # 基于cos(φ(s_t, a_t), φ(s_i, a_i))
# CoT推理生成R_t
R_t = M_exp.generate_reasoning(history + [ (s_t, a_t) ], D_k, tau)
# 预测下一状态和奖励
s_{t+1}, r_{t+1} = M_exp.predict_next(R_t, s_t, a_t, history, D_k, tau)
# 更新缓冲区(在线丰富)
replay_buffer.update( (s_t, a_t, s_{t+1}, r_{t+1}, R_t) )
return s_{t+1}, r_{t+1}2. 辅助函数:任务价值估计(奖励熵,公式7)
python
def estimate_task_value(tau, pi_theta, n, M_exp, replay_buffer):
# 在组G中采样n次rollout(合成环境)
rewards = []
for _ in range(n):
rollout = generate_rollout(tau, pi_theta, M_exp, replay_buffer) # 多轮交互
r_final = rollout.rewards[-1] # 结局奖励
rewards.append(r_final)
mean_r = sum(rewards) / n
variance = sum( (r - mean_r)**2 for r in rewards ) / n # V_τ
return variance # 高熵表示挑战性任务3. 辅助函数:生成rollout(多轮交互)
python
def generate_rollout(tau, pi_theta, M_exp, replay_buffer, max_steps=100):
s_0 = initialize_state(tau) # 初始抽象状态
history = []
trajectory = {'states': [s_0], 'actions': [], 'rewards': []}
for t in range(max_steps):
a_t = pi_theta.sample_action(trajectory['states'][-1], tau) # π_θ(s_t) ~ Δ(A)
history.append( (trajectory['states'][-1], a_t) )
s_{t+1}, r_{t+1} = experience_model_step(trajectory['states'][-1], a_t, history, tau, replay_buffer, k)
trajectory['states'].append(s_{t+1})
trajectory['actions'].append(a_t)
trajectory['rewards'].append(r_{t+1})
if is_terminal(s_{t+1}): # done=True
break
return trajectory # ε = {τ | s0, a0, ...}4. 辅助函数:课程任务生成(公式6)
python
def generate_curriculum_tasks(seeds, M_task, lambda_param):
# 过滤高价值种子(基于V_τ阈值)
high_value_seeds = [tau for tau in seeds if estimate_task_value(tau, pi_theta, n, M_exp, replay_buffer) > threshold]
# 生成m个变体
new_tasks = []
for _ in range(m):
tau_t = M_task.generate_variations(high_value_seeds) # τ_t = M_task({τ_i^{t-1}})
new_tasks.append(tau_t)
# 混合:λ比例新任务,(1-λ)原任务
task_set = (1 - lambda_param) * seeds + lambda_param * new_tasks
return task_set5. 整体训练循环(合成环境RL,论文4.3)
python
def dreamgym_train(seed_tasks, num_iterations, rl_algo='PPO'):
# 初始化
replay_buffer = ExperienceReplayBuffer(initialize_with_offline_data()) # 离线种子
M_exp = load_trained_exp_model() # SFT后
M_task = M_exp # 参数共享
pi_theta = initialize_policy() # e.g., LLM代理
V_func = initialize_value_function() if rl_algo == 'PPO' else None # PPO需V
task_set = seed_tasks # 初始任务集
for iter in range(num_iterations):
trajectories = [] # 本迭代rollout集
# 步骤1: 生成多样rollout
for tau in task_set:
traj = generate_rollout(tau, pi_theta, M_exp, replay_buffer, max_steps)
trajectories.append(traj)
# 步骤2: RL更新策略(PPO或GRPO,公式1-3)
if rl_algo == 'PPO':
advantages = compute_gae(trajectories, V_func, gamma, lambda_gae) # 公式2: Â^PPO_t
update_policy_ppo(pi_theta, trajectories, advantages) # ∇J(θ) = E[∇log π · Â]
elif rl_algo == 'GRPO':
groups = group_trajectories_by_task(trajectories) # 按τ分组G
advantages = compute_grpo(groups) # 公式3: Â^GRPO_t = (r - mean_G)/std_G
update_policy_grpo(pi_theta, trajectories, advantages)
# 步骤3: 课程扩展任务集
task_set = generate_curriculum_tasks(task_set, M_task, lambda_param)
# 可选:评估(e.g., sim-to-real转移)
if iter % eval_freq == 0:
eval_policy(pi_theta, real_env) # 少量真实finetune
return pi_theta # 训练后策略解释与扩展笔记
- 关键循环 :交替"生成(合成rollout)→ 更新(RL)→ 扩展(课程)",确保数据与πθ\pi_\thetaπθ共进化。附录B.1的理论下界保证了合成经验的有效性(trust-region下E∇J≥ϵ\mathbb{E}\\nabla J \geq \epsilonE∇J≥ϵ)。
- 效率:全合成,无真实交互;缓冲区从离线(如WebArena)初始化,在线更新。
- PPO vs. GRPO :伪代码中分支处理;GRPO更适合组高熵任务(VτV_\tauVτ)。
- 实现提示 :用HuggingFace Transformers实现MexpM_{\exp}Mexp(CoT提示);RL用Stable-Baselines3或自定义。完整代码需处理抽象状态SSS(文本精炼)。
- 局限 :伪代码简化了检索ϕ(⋅)\phi(\cdot)ϕ(⋅)(用SentenceTransformer)和终端判断;实际调参k=5,n=20,λ=0.4k=5, n=20, \lambda=0.4k=5,n=20,λ=0.4。
这个伪代码捕捉了DreamGym的本质:统一、可扩展的RL基础设施。
后记
2025年12月3日于上海,在grok 4.1 thinking 辅助下完成。