目录
1.课题概述
基于电磁场时间反演(Electromagnetic Time Reversal, EMTR)算法的雷电定位技术,是一种突破传统定位思路的新型雷电定位方法。其核心原理是利用电磁波的时间反演不变性,通过反向传播雷电辐射的电磁场信号,实现对雷电放电点的精准定位。
2.系统仿真结果
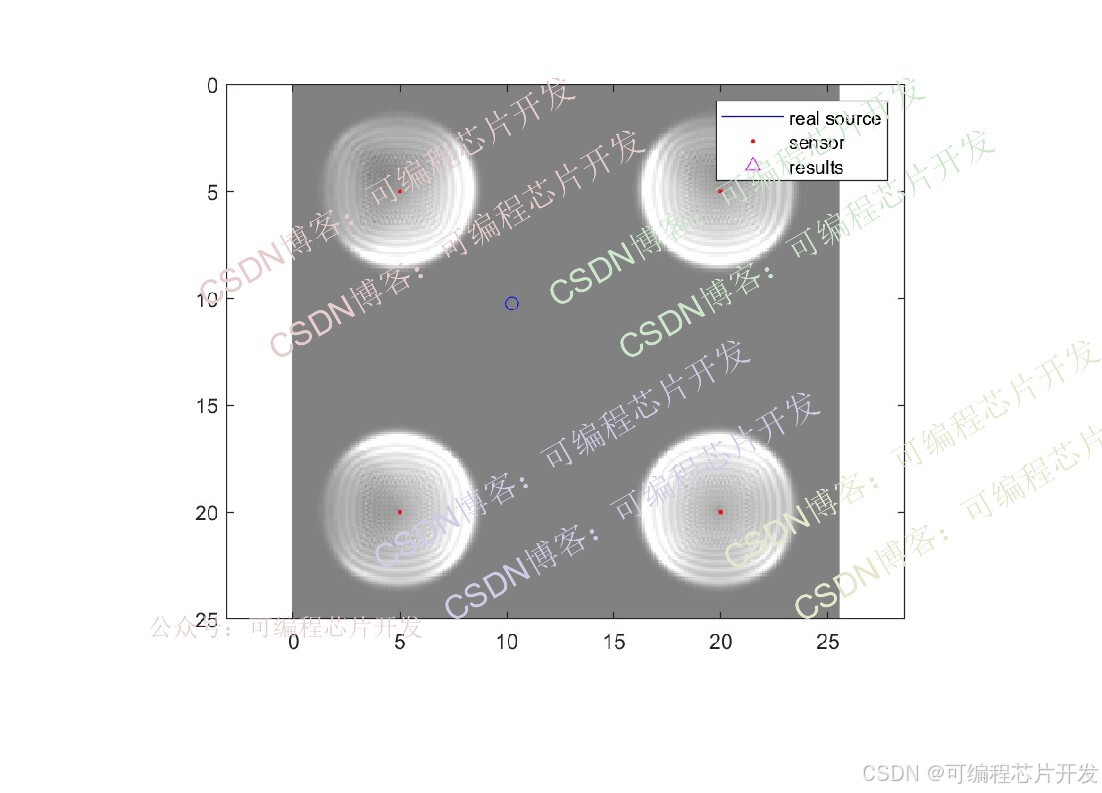
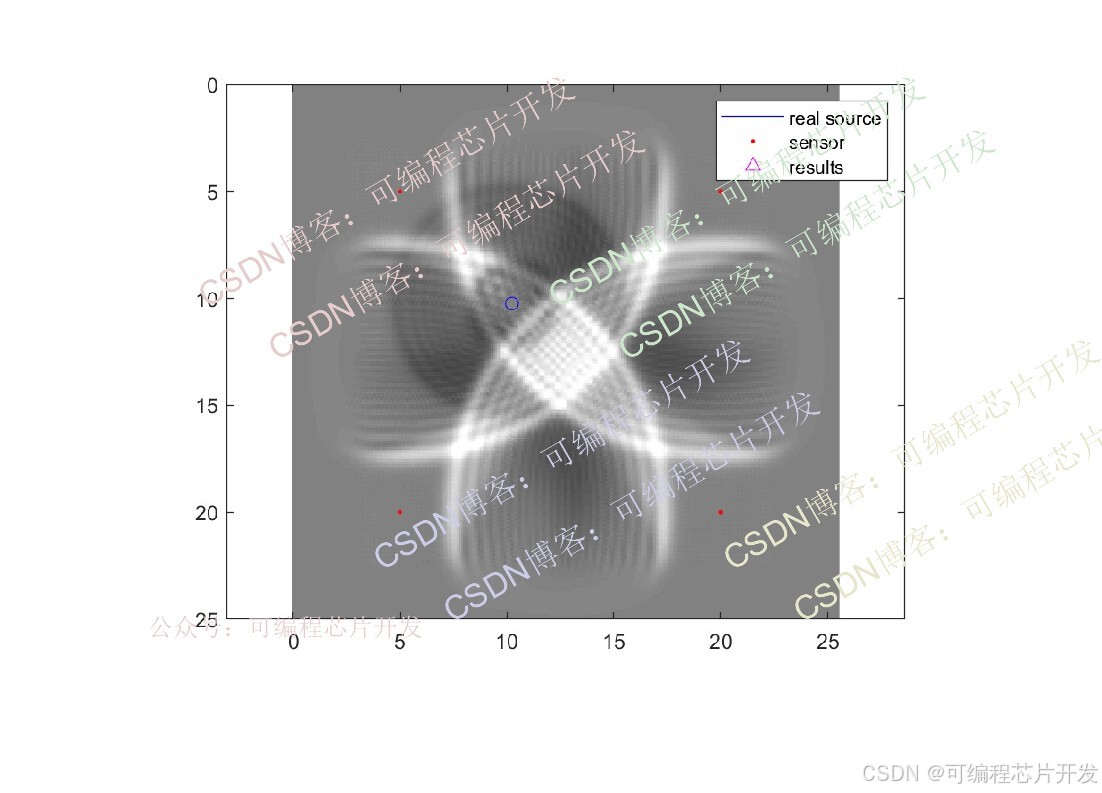
上面三个图的动画效果如下:
上面三个图的动画效果如下:
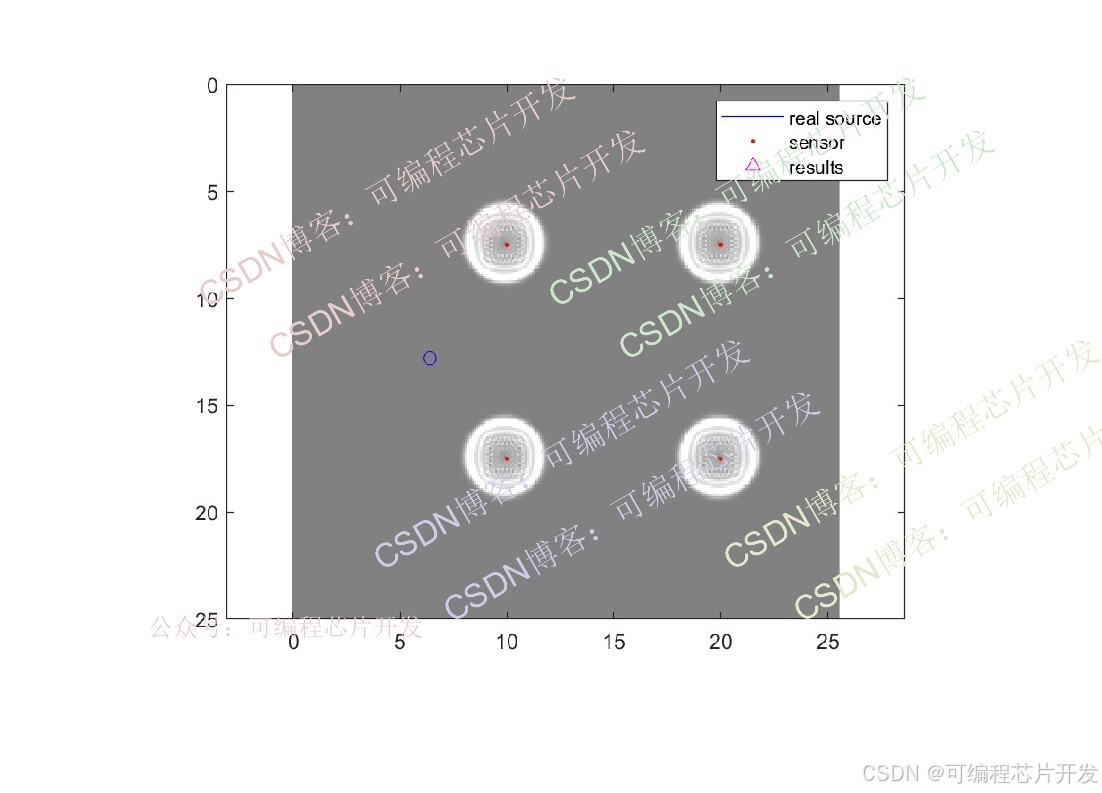
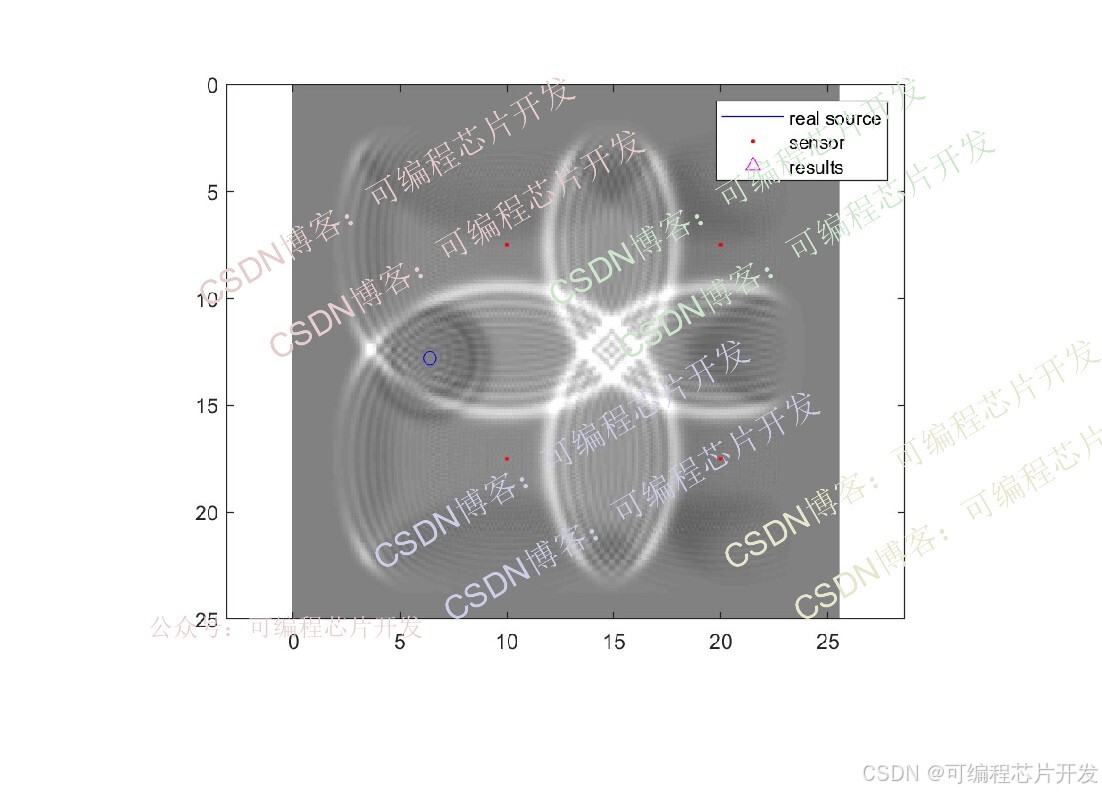
如上图所示,当雷电位于传感器阵列外部时,观测面上的电场最大值点会随时间沿直线向雷电方向移动,无法通过单一"合适时间步"确定定位点。针对该问题,提出多阵列路径追踪法:
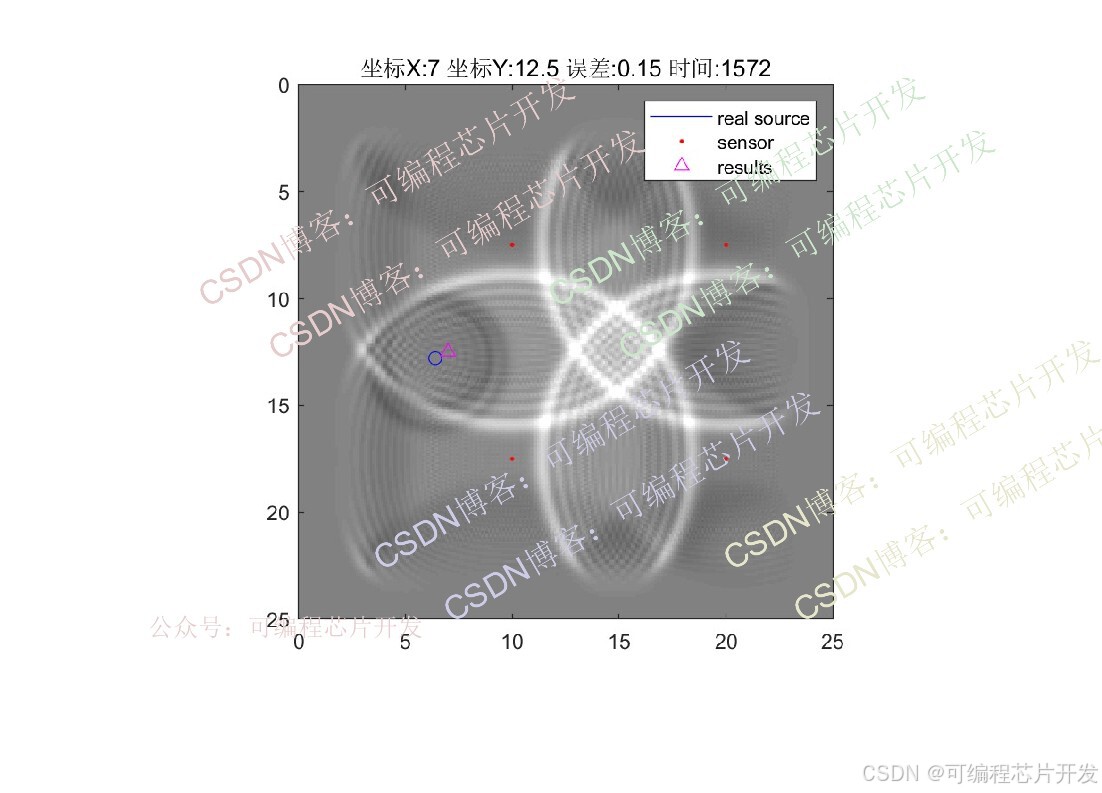
定位路径提取:监测单个阵列反向传播的电场分布,提取不同时刻最大值点的坐标,拟合得到一条直线(定位路径),雷电位置必在该直线上。
多路径相交定位:增设第二个非共线的正方形阵列,重复上述过程得到第二条定位路径,两条路径的交点即为雷电精确位置。
可靠性优化:为应对极端场景(如雷电位于坐标轴上),建议设置3个非共线阵列,通过三条路径的交点进一步提高定位可靠性。
3.核心程序或模型
版本:Matlab2024b
%波速
Speed = 1;
Speed2 = Speed^2;
LenX = 256;
LenY = 256;
Iter = 2000;
%空间间隔
dx = 0.1;
%时间间隔
dt = 0.01;
LenX2 = dx*LenX;
LenY2 = dx*LenY;
Model_Matrix = zeros(LenY,LenX);
%定义网格
x =[0:dx:dx*(LenX-1)];
y =[0:dx:dx*(LenY-1)];
%定义sourse坐标,坐标位置,不要过分的接近某一点,尽量在中心位置的范围之内,这样比较精确
SourceX = LenX2/2.5;
SourceY = LenY2/2.5;
%source大小
SourceR = 0.3;
%定义sensor坐标
sensorX = [5,5,20,20];
sensorY = [5,20,5,20];
%传感器个数
sensor_num = 4;
021_014m4.系统原理简介
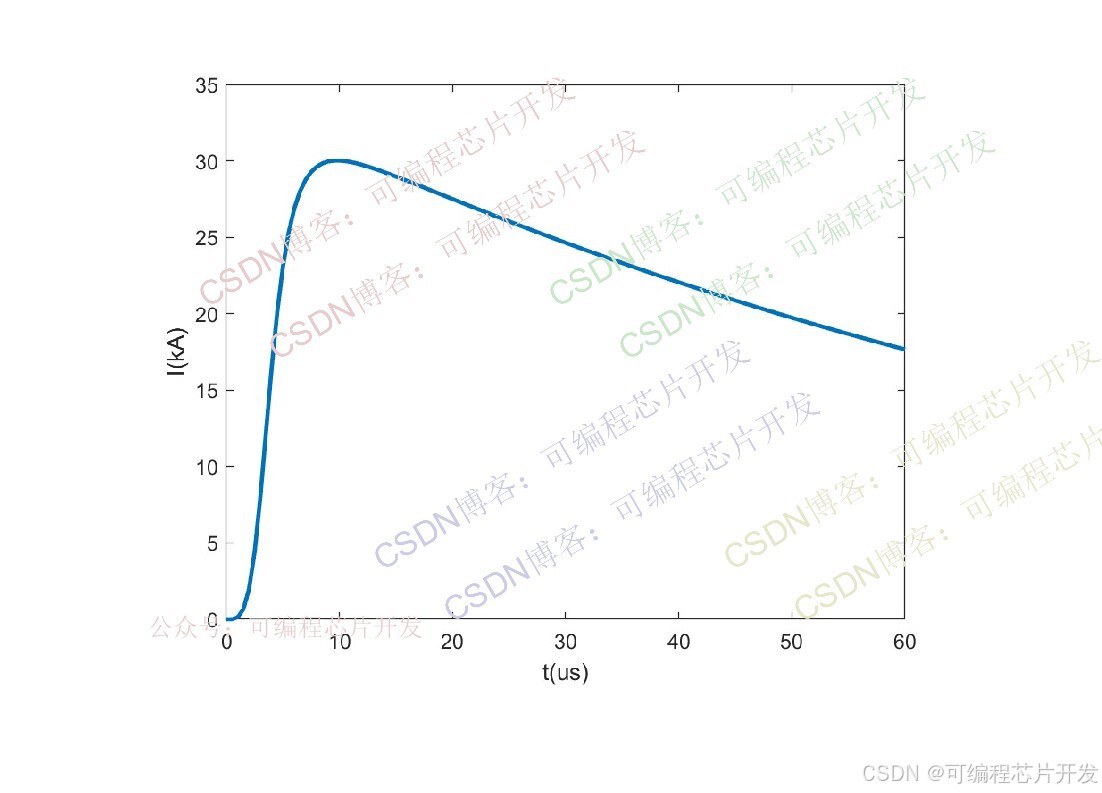
雷电电流源建模
将雷电放电源近似为200米长的短线电流源,采用Heidler函数模拟雷电回击通道的基电流波形,表达式如下:

电磁波在自由空间与地面介质中传播时,会发生衰减和相位偏移,反演传播过程可补偿这些变化,使信号在源点精准汇聚。
模型核心参数
传感器阵列配置,采用4个单极天线组成正方形阵列,天线距原点600米,距地面1米;为确保定位可靠性,实际应用中建议设置3个非共线阵列。
自由空间介电常数ε0、磁导率μ0;地面介质电导率σ1=0.0014S/m,介电常数ε1=2.44(模拟真实土壤特性)。
观测平面选择选取z=25米平面作为观测面,监测反演传播过程中的电场强度(|E|)分布;为减少地面反射干扰,可根据实际场景调整观测面高度。
仿真流程
正向传播阶段:雷电短线电流源辐射电磁场,4个单极天线记录感应信号。
信号反演处理:对记录的感应信号进行时间反演变换(t→T-t)。
反向传播阶段:天线将反演信号反向发射,在观测面上实时监测电场强度分布。
定位判断
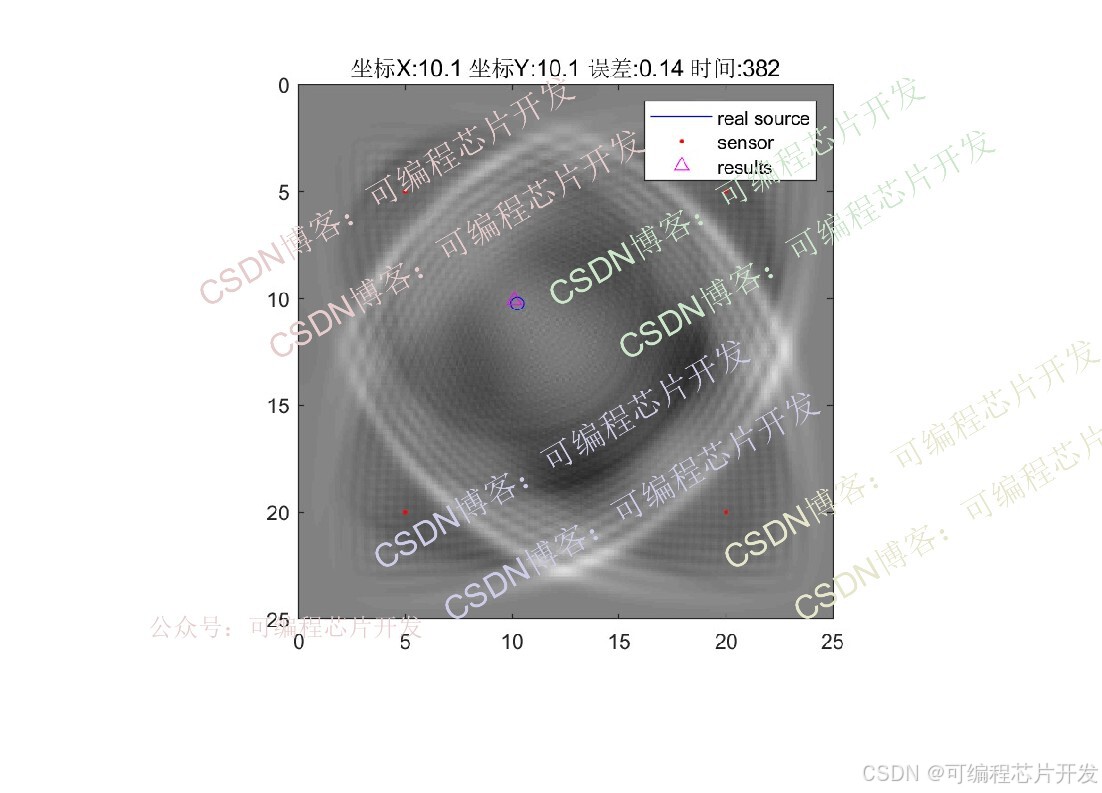
常规场景:反演信号在 "合适时间步" 于雷电位置形成唯一的电场强度最大值点,即为定位结果。
特殊场景:若雷电位于阵列外部,追踪不同阵列的 "定位路径"(电场最大值点的移动轨迹),路径交点即为定位点。
5.完整工程文件
v v
关注后,GZH回复关键词: a14