mujoco构建无物理约束的几何体运动。
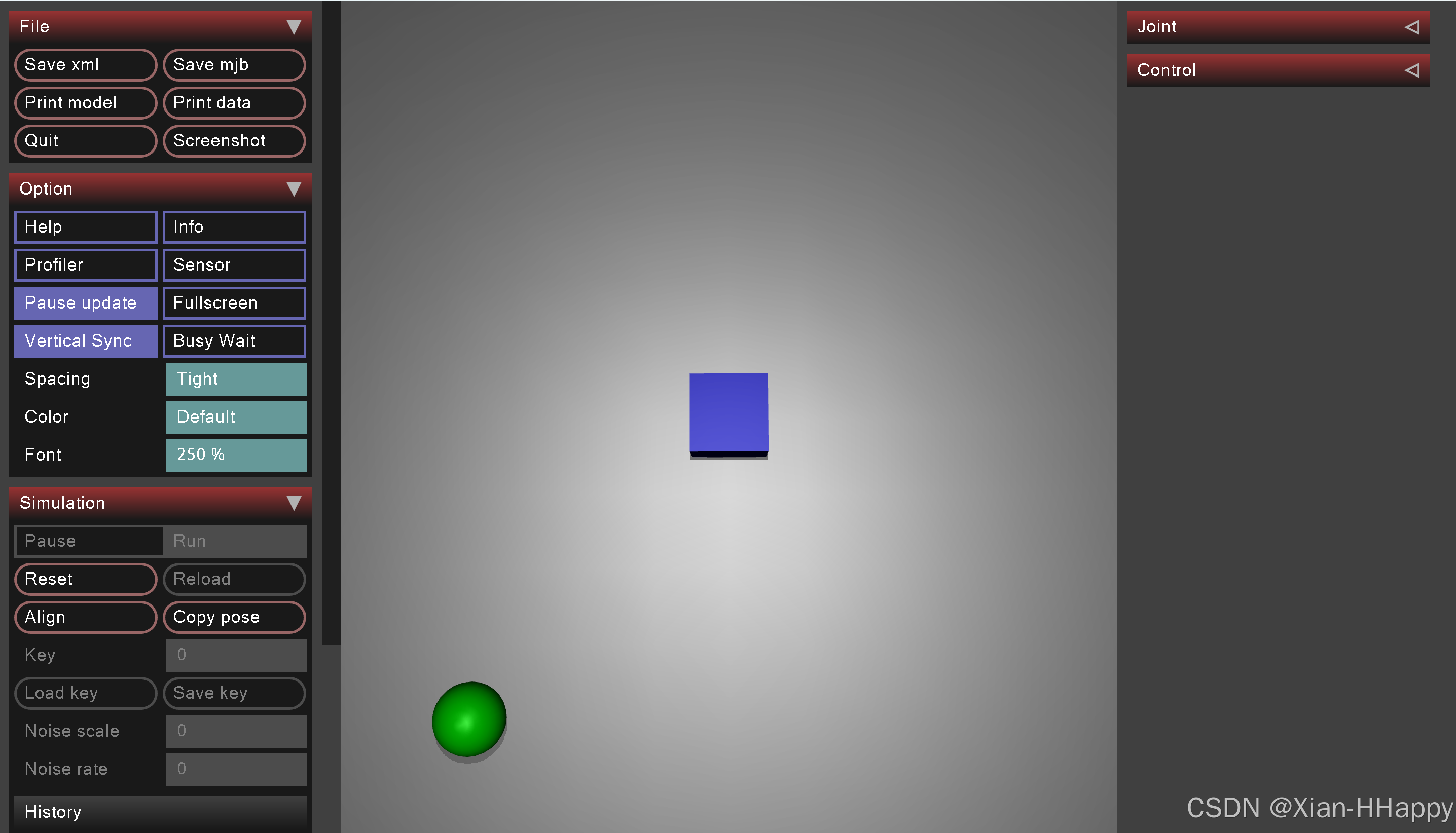
中心位置放置立方块,一个圆球围绕中心按照圆的轨迹进行运动。
具体模型定义、代码实现具体如下:
bash
#-*-coding:utf-8-*-
# date:2025-12-07
# Author: Eric
import mujoco
import mujoco.viewer
import numpy as np
import time
# 1. 定义MuJoCo XML模型(修复range参数+优化关节)
xml = """
<mujoco model="sphere_circle_trajectory">
<compiler angle="degree"/>
<option timestep="0.005"/> <!-- 仿真步长,越小越平滑 -->
<worldbody>
<light diffuse="0.5 0.5 0.5" pos="0 0 3" dir="0 0 -1"/>
<geom name="ground" type="plane" size="2 2 0.1" rgba="0.5 0.5 0.5 1"/>
<body name="cube" pos="0 0 0.1">
<joint type="free"/>
<geom type="box" size="0.1 0.1 0.1" rgba="0.0 0.0 0.5 1"/>
</body>
<!-- 球体 -->
<body name="sphere" pos="0.0 0.0 0.09"> <!-- z=0.09:球体半径,刚好贴地面 -->
<!-- 关节:仅允许x/y平移,z轴通过微小range+高阻尼固定 -->
<joint name="sphere_x" type="slide" axis="1 0 0" damping="1"/>
<joint name="sphere_y" type="slide" axis="0 1 0" damping="1"/>
<joint name="sphere_z" type="slide" axis="0 0 1" limited="true"
range="0.089 0.091" damping="100"/> <!-- 微小范围+高阻尼固定z轴 -->
<geom type="sphere" size="0.09" rgba="0.0 0.9 0.0 1"/>
</body>
</worldbody>
<!-- 控制器:为x/y关节添加位置控制 -->
<actuator>
<position name="act_x" joint="sphere_x" kp="1000"/> <!-- kp:位置增益 -->
<position name="act_y" joint="sphere_y" kp="1000"/>
</actuator>
</mujoco>
"""
# from_xml_path
# 2. 初始化MuJoCo模型和数据
model = mujoco.MjModel.from_xml_string(xml)
data = mujoco.MjData(model)
# 3. 定义圆形轨迹参数
circle_radius = 1.0 # 圆半径
center_x, center_y = 0, 0 # 圆心坐标
angular_velocity = 0.3 # 角速度(rad/s),控制运动速度
# 4. 仿真循环(带可视化)
with mujoco.viewer.launch_passive(model, data) as viewer:
# 固定仿真帧率
viewer._paused = False
start_time = time.time()
while viewer.is_running():
# 计算当前时间和角度
current_time = time.time() - start_time
theta = angular_velocity * current_time # 随时间变化的角度
# 计算圆形轨迹的目标位置(x,y)
target_x = center_x + circle_radius * np.cos(theta)
target_y = center_y + circle_radius * np.sin(theta)
# 方式:直接修改物体状态(无物理约束,慎用)
data.joint("sphere_x").qpos = target_x
data.joint("sphere_y").qpos = target_y
# 运行一步仿真
mujoco.mj_step(model, data)
# 同步可视化
viewer.sync()
# 控制仿真帧率(避免过快)
time.sleep(model.opt.timestep)代码执行效果如下: